一、深入理解ARMCPU架構及其指令格式、ARM匯編語言編程方法
1.匯編語言編程,實現LED燈
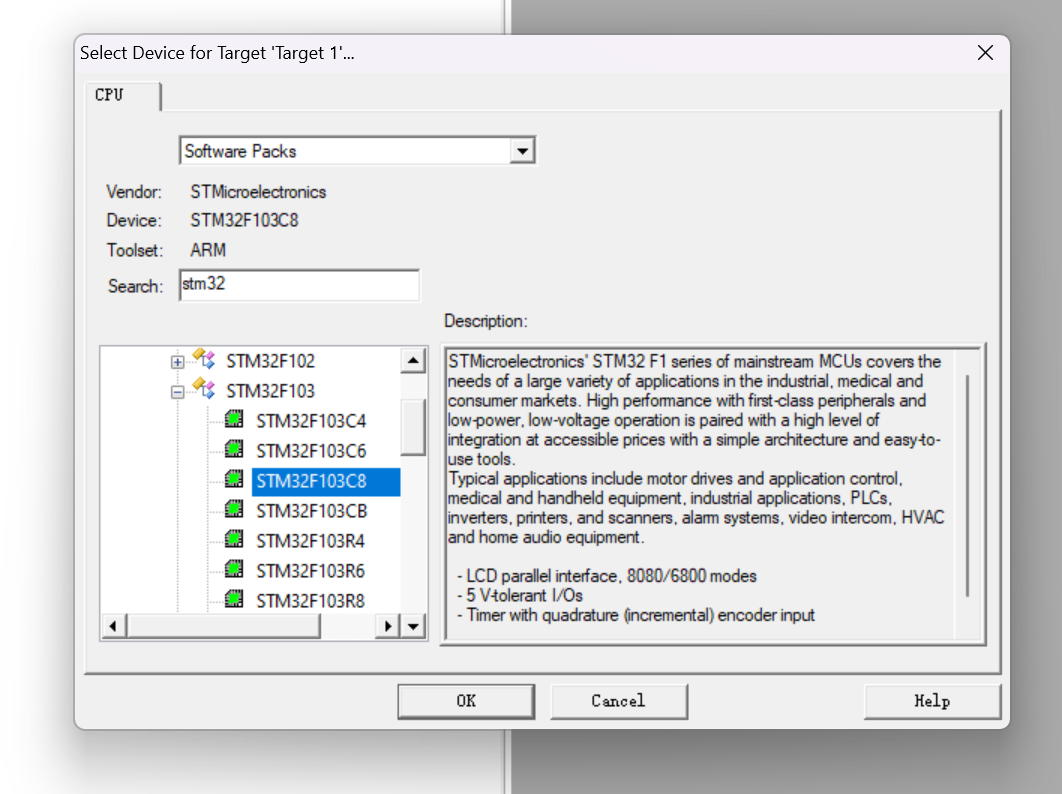
新建keil項目,選擇芯片
選擇運行環境以及配置
![![[Pasted image 20250401193413.png]]](https://i-blog.csdnimg.cn/direct/c193cb494c484dad9628e869c73602da.png)
![![[Pasted image 20250401193634.png]]](https://i-blog.csdnimg.cn/direct/375a5fa89386434185b1eaa9913322a5.png)
添加.s文件
![![[Pasted image 20250401193737.png]]](https://i-blog.csdnimg.cn/direct/ad7ad69599294fe4ba0f89870e701f39.png)
匯編程序:
AREAMYDATA,DATA
AREAMYCODE,CODE
ENTRY
EXPORT__main
__main
MOVR0,#10
MOVR1,#11
MOVR2,#12
MOVR3,#13
;LDRR0,=func01
BL func01
;LDRR1,=func02
BL func02
BL func03
LDRLR,=func01
LDRPC,=func03
B.
func01
MOVR5,#05
BXLR
func02
MOVR6,#06
BXLR
func03
MOVR7,#07
MOVR8,#08
BXLR
點亮PC13程序:
LED0
EQU
0x4001100C
RCC_APB2ENR
EQU
0x40021018
GPIOC_CRH
EQU
0x40011004
Stack_Size
EQU
0x00000400
AREA STACK,NOINIT,READWRITE,ALIGN=3
Stack_Mem
SPACE Stack_Size
__initial_sp
AREA RESET,DATA,READONLY
__Vectors
DCD
__initial_sp
; Top of Stack
DCD
Reset_Handler
; Reset Handler
AREA |.text|, CODE, READONLY
THUMB
REQUIRE8
PRESERVE8
ENTRY
Reset_Handler
BL
LED_Init
MainLoop
BL LED_ON
BL Delay
BL LED_OFF
BL Delay
B MainLoop
LED_Init
PUSH {R0,R1,LR}
LDR R0,=RCC_APB2ENR
LDR R0,[R0]
ORR R0,R0,#0x10
LDR R1,=RCC_APB2ENR
STR R0,[R1]
LDR R0,=GPIOC_CRH
LDR R0,[R0]
BIC R0,R0,#0xF0000
ORR R0,R0,#0x30000
LDR R1,=GPIOC_CRH
STR R0,[R1]
MOV R0,#1
(LED滅)
LSL R0,R0,#13
LDR R1,=LED0
STR R0,[R1]
POP {R0,R1,PC}
LED_ON
PUSH {R0,R1,LR}
MOV R0,#0
LDR R1,=LED0
STR R0,[R1]
POP {R0,R1,PC}
LED_OFF
PUSH {R0,R1,LR}
MOV R0,#1
LSL R0,R0,#13
LDR R1,=LED0
STR R0,[R1]
POP {R0,R1,PC}
Delay
PUSH {R0-R2,LR}
MOVS R0,#0
MOVS R1,#0
MOVS R2,#0
DelayLoop0
ADDS R0,R0,#1
CMP R0,#330
BCC DelayLoop0
MOVS R0,#0
ADDS R1,R1,#1
CMP R1,#330
BCC DelayLoop0
MOVS R0,#0
MOVS R1,#0
ADDS R2,R2,#1
CMP R2,#15
BCC DelayLoop0
POP {R0-R2,PC}
END
2.對比C語言寄存器
C語言寄存器模式代碼:
#include “stm32f10x.h”
void delay(u16 num)
{
u16 i,j;
for(i=0;i<num;i++)
for(j=0;j<0x800;j++);
}
int main(void)
{
RCC->APB2ENR = 0x0000001C;
while(1)
{
GPIOB->ODR &= ~(1 << 5);
delay(100);
GPIOB->ODR |= (1 << 5);
delay(200);
}
}
分析:
匯編語言的hex比C語言寄存器代碼小。
匯編語言直接使用CPU指令操作寄存器,而C語言寄存器經過編譯后會產生額外的指令。C代碼編譯后會自動添加一些啟動和初始化代碼。純匯編需要手動定義程序入口和段屬性。
二、熟悉ARM 匯編語言與C語言混合編程方式,掌握反匯編工具
1.在Keil中修改C程序的 主函數為其他名稱
C程序主函數名并非必須為main。在ARM開發中,入口函數的名稱可以自定義。
在 startup 文件中修改入口點聲明
![![[Pasted image 20250401200246.png]]](https://i-blog.csdnimg.cn/direct/b7196089e30740848244cc8efe65bd8b.png)
2.IDA Pro工具
加載hex/bin文件
![![[Pasted image 20250401200850.png]]](https://i-blog.csdnimg.cn/direct/88e063356a064490aa76f6a5792a7dfb.png)
使用 IDA Pro 對給定的 hex(bin)文件進行反匯編分析,找出控制LED 燈閃爍的相關代碼段。這可能涉及對GPIO端口配置、延時函數以及LED狀態 切換等相關代碼的識別。在反匯編代碼中,查找與(PB0)端口操作相關的指令, 如GPIO初始化、輸出電平設置以及可能的延時循環等部分。
在 IDA Pro 中對反匯編后的代碼進行修改,將與 PC13 相關的操作改為針 對 PA1 的操作。修改完成后,使用 IDA Pro 的重新匯編功能或其他相關工具 將修改后的匯編代碼轉換為二進制文件。將生成的二進制文件下載到目標硬件 平臺進行驗證,觀察 PA1 LED 燈是否按照預期進行閃爍。在驗證過程中,可 使用示波器、邏輯分析儀等工具監測 PA1 端口的電平變化,確保程序功能修 改正確。
源代碼:
![![[Pasted image 20250401201843.png]]](https://i-blog.csdnimg.cn/direct/2c87aee9fc02416f869d8f7640cd0f86.png)
IDA匯編:
![![[Pasted image 20250401202007.png]]](https://i-blog.csdnimg.cn/direct/6081fb305eb54bf7a7b10a091acd5076.png)
三、掌握gcc編譯工具集編譯、鏈接源程序生成二進制應用程序
1.配置C/C++環境
安裝gcc:sudo apt-get install gcc
![![[Pasted image 20250401204543.png]]](https://i-blog.csdnimg.cn/direct/3071b70642314f7698d4ac1576ab0ddb.png)
安裝g++:sudo apt-get install g++
![![[b2facef77e274941f5b87ad4369bf6d.png]]](https://i-blog.csdnimg.cn/direct/8ca263a291f1494db30ca99fc527a4e7.png)
安裝gbd:sudo apt-get install gdb
![![[1f8f87dc87e149a83e0cd42b177dcd9.png]]](https://i-blog.csdnimg.cn/direct/d5f48dc8c5f2457aa5bd9a2e14887021.png)
2.安裝、配置VScode
3.安裝、配置arm-none-eabi-gcc 交叉編譯工具鏈
下載解壓完成后,進入 “arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi”文件夾進入“bin”文件夾。
打開profile 文件,在最后輸入:
export PATH=$PATH:/home/yml/mondrian/arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi/bin
執行:source profile
4.安裝CubeMX
測試程序
![![[Pasted image 20250401205812.png]]](https://i-blog.csdnimg.cn/direct/6222b86f689d4dd3a4e5247ec100e474.png)
四、了解ARM 應用程序的上電復位初始化、startup啟動到跳轉到C語言main 函數入庫的過程
1.STM32的啟動過程
復位后啟動模式的選擇
復位方式有三種:上電復位,硬件復位和軟件復位。當產生復位,并且離開
復位狀態后,CM3 內核做的第一件事就是讀取下列兩個32 位整數的值:
(1)從地址 0x00000000 處取出堆棧指針 MSP 的初始值,該值就是棧頂
地址。
(2)從地址 0x00000004 處取出程序計數器指針 PC 的初始值,該值指向
復位后執行的第一條指令。
內核在離開復位狀態后會從映射的地址中取值給棧指針MSP及程序指針 PC,然后執行指令,我們一般以存儲器的類型來區分自舉過程,例如內部FLASH 啟動方式、內部SRAM啟動方式以及系統存儲器啟動方式。
內部FLASH啟動方式:
當芯片上電后采樣到BOOT0引腳為低電平時,0x00000000和0x00000004 地址被映射到內部FLASH的首地址0x08000000和0x08000004。因此,內核 離開復位狀態后,讀取內部FLASH的0x08000000地址空間存儲的內容,賦值 給棧指針MSP,作為棧頂地址,再讀取內部FLASH的0x08000004地址空間存 儲的內容,賦值給程序指針PC,作為將要執行的第一條指令所在的地址。具備 這兩個條件后,內核就可以開始從PC指向的地址中讀取指令執行了。
內部SRAM啟動方式:
當芯片上電后采樣到BOOT0和BOOT1引腳均為高電平時, 0x00000000和0x00000004地址被映射到內部SRAM的首地址0x20000000和 0x20000004,內核從SRAM空間獲取內容進行自舉。 在實際應用中,由啟動文件starttup_stm32f10x.s決定了0x00000000和 0x00000004地址存儲什么內容,鏈接時,由分散加載文件(sct)決定這些內容的 絕對地址,即分配到內部FLASH還是內部SRAM。 這里的啟動文件和分散加載文件有點不好理解,當說“由啟動文件決定了 0x00000000和0x00000004地址存儲什么內容”時,指的是啟動文件定義了這兩 個關鍵地址處的內容:一個是堆棧指針的初始值,另一個是指向復位處理程序的 指針。而“由分散加載文件決定這些內容的絕對地址”則意味著,盡管啟動文件設 定了邏輯上的地址,但是具體的物理地址(即這些內容實際上位于FLASH還是 SRAM)是由分散加載文件來決定的。這允許開發者根據需要調整最終的內存布 局,同時保持啟動代碼的邏輯不變。
系統存儲器啟動方式:
當芯片上電后采樣到BOOT0引腳為高電平,BOOT1為低電平時,內核將 從系統存儲器的0x1FFFF000及0x1FFFF004獲取MSP及PC值進行自舉。系 統存儲器是一段特殊的空間,用戶不能訪問,ST公司在芯片出廠前就在系統存 儲器中固化了一段代碼。因而使用系統存儲器啟動方式時,內核會執行該代碼, 該代碼運行時,會為ISP提供支持(InSystemProgram),如檢測USART1/2、CAN2 及USB通訊接口傳輸過來的信息, 并根據這些信息更新自己內部FLASH的內 容,達到升級產品應用程序的目的,因此這種啟動方式也稱為ISP啟動方式。
2.STM32的啟動方式實驗
代碼:
#include “led.h”
#include “delay.h”
//#include"key.h"
#include “sys.h”
#include “usart.h”
#include <stdio.h>
#include <stdlib.h>
int k1= 1; //已初始化全局int型變量k1
int k2; //未初始化全局int型變量k2
staticint k3 = 2;//已初始化靜態全局int型變量k3
staticint k4; //未初始化靜態全局int型變量k4
int main(void)
{
delay_init(); //延時函數初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //設置NVIC中斷分組2:2位搶占優
先級,2位響應優先級
uart_init(115200); //串口初始化為115200
LED_Init(); //LED端口初始化
//KEY_Init(); //初始化與按鍵連接的硬件接口
while(1)
{
static int m1 = 2; //已初始化靜態局部int型變量m1
static int m2; //未初始化靜態局部int型變量m2
int i1; //未初始化局部int型變量i1
int i2; //未初始化局部int型變量i2
char *p; //未初始化局部char型指針變量p
char str[10] =“hello”;//已初始化局部char型數組str
char *var1 = “123456”; //已初始化局部char型指針變量var1
char *var2 = “abcdef”; //已初始化局部char型指針變量var2
int *p1 =malloc(4); //已初始化局部int型指針變量p1
int *p2 =malloc(4); //已初始化局部int型指針變量p2
printf(“棧區-變量地址\r\n”);
printf(“未初始化局部int型變量i1 :0x%p\r\n”,&i1);
printf(“未初始化局部int型變量i2 :0x%p\r\n”,&i2);
printf(“未初始化局部char型指針變量p :0x%p\r\n”,&p);
printf(“已初始化局部char型數組str :0x%p\r\n”,str);
//test();
printf(“\n堆區-動態申請地址\r\n”);
printf(“已初始化局部int型指針變量p1 :0x%p\r\n”,p1);
printf(“已初始化局部int型指針變量p2 :0x%p\r\n”,p2);
printf(“\n.bss段地址\r\n”);
printf(“未初始化全局int型變量k2 :0x%p\r\n”,&k2);
printf(“未初始化靜態全局int型變量k4 :0x%p\r\n”,&k4);
printf(“未初始化靜態局部int型變量m2 :0x%p\r\n”,&m2);
printf(“\n.data段地址\r\n”);
printf(“已初始化全局int型變量k1 :0x%p\r\n”,&k1);
printf(“已初始化靜態全局int型變量k3 :0x%p\r\n”,&k3);
printf(“已初始化靜態局部int型變量m1 :0x%p\r\n”,&m1);
printf(“\n常量區地址\r\n”);
printf(“已初始化局部char型指針變量var1:0x%p\r\n”,var1);
printf(“已初始化局部char型指針變量var2:0x%p\r\n”,var2);
printf(“\n代碼區地址\r\n”);
printf(“程序代碼區main函數入口地址:0x%p\r\n”, &main);
free(p1);
free(p2);
}
}
串口輸出結果:
![![[Pasted image 20250401213137.png]]](https://i-blog.csdnimg.cn/direct/5c14eb5555c64255b211b73d2f751f94.png)
從中可以分析,main函數入口地址、常量區及代碼區的存儲地址都在 0x8000000開始的,說明程序成功從FALSH運行;全局和靜態變量、棧區的地 址也都分配在0x20000000儲存地址(高地址)處,堆區的地址分配在0x00000000 處。







應用開篇 | RAG方法論概述 | 構建知識庫探索)


】筑牢家政平臺安全防線:全方位隱私與安全需求解析)
的原理與應用解析)


——系統調優)

)

)
