一、CNN入門介紹
1、卷積神經網絡(Convolutional Neural Network,簡稱 CNN)是一種專門為處理具有網格結構數據(如圖像、音頻)而設計的深度學習模型。
在傳統的全連接神經網絡(FNN)中,輸入的每個神經元都與下一層的所有神經元相連,這會導致參數數量隨著輸入維度的增加而急劇增長,并且無法有效利用數據的空間結構信息。(更多的只是關注了全局的特征)
而 CNN 則通過卷積層、池化層等特殊結構,大大減少了模型的參數數量,同時能夠自動提取數據中的局部特征,并且對平移、縮放等變換具有一定的不變性。。在圖像識別、目標檢測、語義分割等計算機視覺任務廣泛運用
2、卷積的思想
在之前的OpenCv的學習中,我們接觸到了很多的算子,比如Roberts算子,拉普拉斯算子等等,這些都是運用卷積的思想,對圖像操作進行邊緣提取。
可以把卷積理解為一種 “特征提取器”。想象你有一張藏寶圖(圖像),上面隱藏著各種寶藏線索(特征),但是線索分布比較雜亂。而卷積操作就像是一個帶有不同形狀 “放大鏡”(卷積核)的尋寶工具。
每個 “放大鏡” 都有自己特定的形狀和功能,比如有的專門找直線形狀的線索(檢測邊緣),有的找圓形的線索(檢測類似眼睛的部件) 。當我們拿著這些 “放大鏡” 在藏寶圖上一格一格地移動(卷積核在圖像上滑動),去觀察每個小區域(感受野),就可以把對應的線索找出來,也就是提取出了圖像的局部特征
二、卷積層
1、卷積核
卷積核其實是一個小矩陣,在定義時需要考慮以下幾方面的內容:
卷積核的個數:卷積核(過濾器)的個數決定了其輸出特征矩陣的通道數。每一個卷積核對應一個通道數,也就對應一張特征圖
卷積核的值:卷積核的值是初始化好的,后續進行更新。
卷積核的大小:常見的卷積核有1×1、3×3、5×5等,一般都是奇數 × 奇數
2、卷積計算過程:
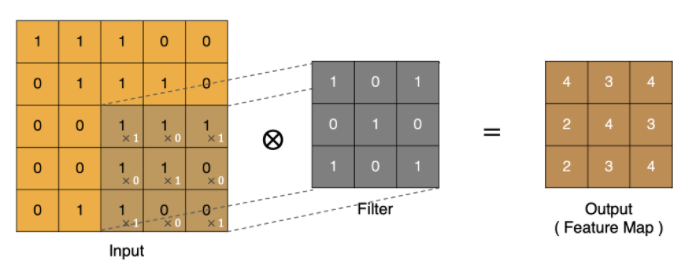
卷積的過程是將卷積核在圖像上進行滑動計算,每次滑動到一個新的位置時,卷積核和圖像進行點對點的計算,并將其求和得到一個新的值,然后將這個新的值加入到特征圖中,最終得到一個新的特征圖
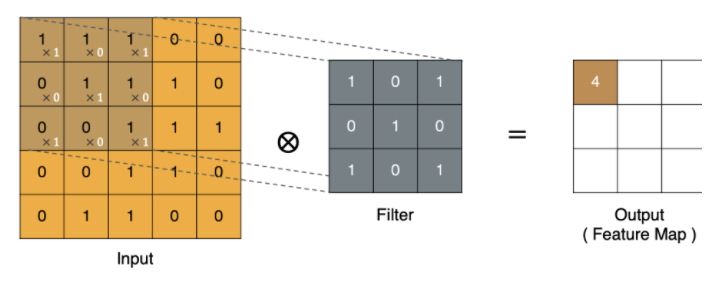

input 表示輸入的圖像
filter 表示卷積核, 也叫做濾波器
input 經過 filter 的得到輸出為最右側的圖像,該圖叫做特征圖,所有的特征圖的數量就是輸出通道數,在代碼中通常用out_channels(其實就是特征圖的數量)
代碼:了解卷積
from matplotlib import pyplot as plt
import torch.nn as nn
import os
import torchimage_path= os.path.relpath('../data/彩色.png')
img_data = plt.imread(image_path)
#shape是(高,寬,通道)(H, W, C),要轉變為(N, C, H, W)---->先轉為(C, H, W),再轉(N, C, H, W)
print(img_data.shape)img_data =torch.tensor(img_data.transpose(2,0,1)).unsqueeze(0)print(img_data.shape)#卷積層
conv = nn.Conv2d(in_channels=4, #輸入通道數out_channels=1, #輸出通道數(卷積核個數,對應輸出的特征個數)kernel_size=3, #卷積核大小stride=1, #步長
)
#conv傳入的參數是(N, C, H, W)
output = conv(img_data)#輸出(N, C, H, W)
print(output.shape)#還原成圖片
out = output.squeeze(0).data.numpy()#去掉batch維度,轉成numpy數組
out = out.transpose(1,2,0)
#繪圖
plt.imshow(out)
plt.show()正常圖片輸入的shape是(高,寬,通道)(H, W, C),進行卷積的API:nn.Conv2d(),輸入的數據格式應該是四維的:(N, C, H, W),在傳入img_data前需要經過轉換,先用transpose方法轉為(C, H, W)再用unqueeze在0維上升維,轉為(N, C, H, W)
Conv2d的使用
conv = nn.Conv2d(
? ? in_channels=4, ?#輸入通道數
? ? out_channels=1, ?#輸出通道數(卷積核個數,對應輸出的特征個數)
? ? kernel_size=3, #卷積核大小
? ? stride=1, ?#步長
)
????????我們需要去理解,這里的in_channels和out_channels到底是什么,在進行多層卷積神經網絡時才能正確傳入參數。
????????其中in_channels,輸入的通道數,也就是(N, C, H, W)里面的C,對于初始我們給的圖像而言,常常就是單通道(1),三通道(3),四通道(4)
????????但是經過卷積操作后,這里的out_channels輸出通道就不再是簡單的圖像上顏色對應的通道了,而是特征通道(經過每個卷積核操作后生成的特征圖個數,也就是卷積核個數)
? ? ? ? 例如:? ?
第一層卷積
conv1:in_channels=1(輸入是單通道灰度圖),out_channels=16。
這意味著卷積層會創建16 個不同的 3×3 卷積核,每個卷積核專門檢測一種局部特征(如:
- 第 1 個卷積核:檢測水平邊緣
- 第 2 個卷積核:檢測垂直邊緣
- 第 3 個卷積核:檢測 45° 角紋理
- ...
- 第 16 個卷積核:檢測特定的斑點 / 明暗變化)
每個卷積核與輸入圖像卷積后,會輸出一張 “特征圖”(通道),16 個卷積核就得到 16 個通道,每個通道的數值表示 “該位置是否包含對應特征” 以及 “特征強度”。
3、邊緣填充
在上面的圖像中可以看出,經過卷積計算后特征圖的尺寸會比原始圖像尺寸小,這是由于在卷積過程中邊緣的像素值計算后放在卷積核中心去了,如果想要保持圖像大小不變, 可在原圖周圍添加padding來實現(邊緣填充)。
在代碼中,就是在conv = nn.Conv2d方法中加入參數padding=n,其中n表示用什么來填充,一般默認是0
4、步長
一般步長是根據圖像的大小而定,在圖像尺寸很小時,例如只有20*20,總共一行都沒多少個像素值,所以步長肯定不宜過大。當圖像比較大時,也可以適當的設置為2、3等等。需要去實驗
stride太小:重復計算較多,計算量大,訓練效率降低;
stride太大:會造成信息遺漏,無法有效提煉數據背后的特征;
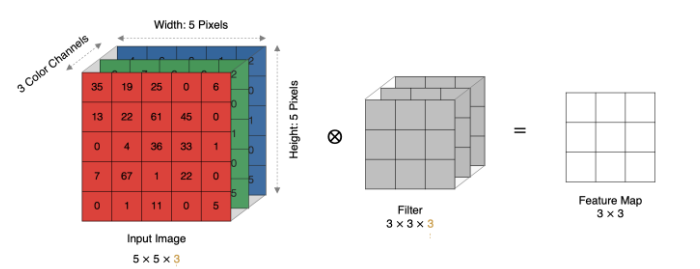
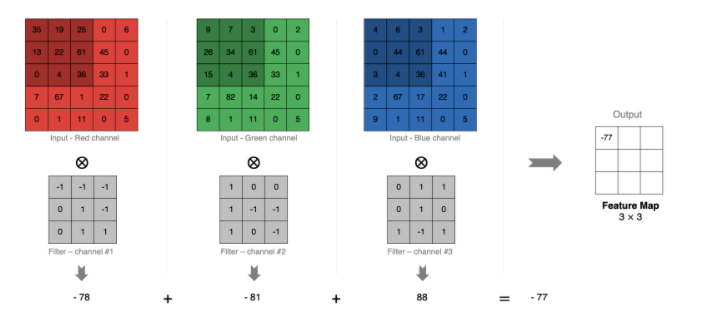
5、多通道卷積計算
當輸入有多個通道(Channel), 例如RGB三通道, 此時要求卷積核需要有相同的通道數。
卷積核通道與對應的輸入圖像通道進行卷積。
將每個通道的卷積結果按位相加得到最終的特征圖
如圖:
6、多卷積核計算
實際對圖像進行特征提取時, 我們需要使用多個卷積核進行特征提取,通過多個卷積核從輸入數據中提取多種類型的特征
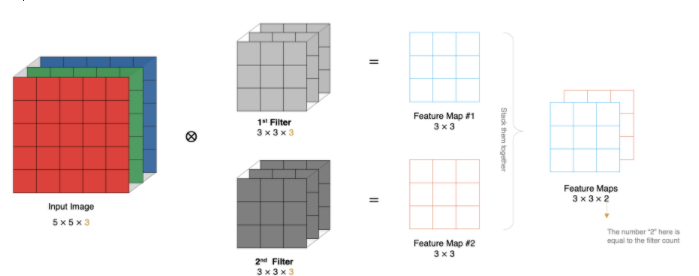
其實就是上面講Conv2d方法中提到的out_channels
用 “團隊分工” 類比多卷積核
假設你需要分析一張動物圖片:
- 有人負責觀察 “邊緣”(比如動物的輪廓)
- 有人負責觀察 “紋理”(比如毛發的粗細)
- 有人負責觀察 “顏色塊”(比如是否有黑白條紋)
- 每個人專注于一種特征,最后匯總所有觀察結果,才能全面判斷這是貓、狗還是老虎
7、特征圖大小
size: 卷積核/過濾器大小,一般會選擇為奇數,比如有 1×1, 3×3, 5×5
Padding: 零填充的方式
Stride: 步長
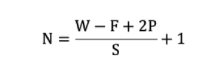
那計算方法如下圖所示:
輸入圖像大小: W x W
卷積核大小: F x F
Stride: S
Padding: P
輸出圖像大小: N x N
8、局部特征提取——多層多通道卷積核進行特征提取
本質是通過層級化的特征組合,從原始數據中逐步提煉出從簡單到復雜、從局部到全局的特征
用 “拼圖游戲” 類比多層特征提取
想象你在拼一幅復雜的動物拼圖:
- 第一層(淺層):你先找所有帶 “直邊”“曲邊” 的拼圖塊(對應低級特征:邊緣、紋理)。
- 第二層(中層):你把 “直邊 + 曲邊” 組合成 “耳朵”“爪子” 等部件(對應中級特征:局部部件)。
- 第三層(深層):你把 “耳朵 + 爪子 + 身體” 組合成完整的 “貓”(對應高級特征:整體物體)。
每一層基于上一層的特征,通過多通道卷積核進行 “特征組合”,逐步構建更抽象、更有意義的表示
示例:
我們以 “RGB 圖像(3 通道)→ 3 層卷積” 為例,詳細拆解每一層的輸入、卷積核作用和輸出特征
1. 輸入層:原始圖像(物理通道)
輸入是一張?\(224 \times 224 \times 3\)?的 RGB 圖像
????????這些是最原始的像素信息,沒有經過任何特征提取
2. 第一層卷積(提取低級特征)
- 輸入通道:3(RGB 三通道)
- 卷積核設置:16 個卷積核,每個尺寸為?\(3 \times 3 \times 3\)(深度 = 輸入通道數 3,確保能覆蓋所有顏色通道)
- 操作邏輯:每個卷積核在輸入圖像上滑動,對 3 個顏色通道的對應區域同時計算(每個通道與卷積核的對應切片做點積,再求和),輸出 1 個特征圖。16 個卷積核共輸出 16 個通道。
- 輸出特征:16 個?\(222 \times 222\)?的特征圖(假設 stride=1,padding=0),每個通道對應一種低級特征:
- 通道 0:檢測 “水平紅色邊緣”
- 通道 1:檢測 “45° 綠色紋理”
- 通道 2:檢測 “垂直藍色邊緣”
- ...(16 種不同的邊緣、紋理、顏色塊特征)這些特征我們也無法確認,是計算機自行去計算,我們也不需要去搞懂到底提取了哪些特征
3. 第二層卷積(組合低級特征為中級特征)
- 輸入通道:16(第一層輸出的 16 種低級特征)
- 卷積核設置:32 個卷積核,每個尺寸為?\(3 \times 3 \times 16\)(深度 = 輸入通道數 16,能覆蓋所有低級特征)
- 操作邏輯:每個卷積核滑動時,會同時 “觀察” 第一層的 16 個特征通道(比如:“水平邊緣通道” 的響應 +“垂直邊緣通道” 的響應),通過權重加權求和,輸出 1 個新的特征圖。32 個卷積核輸出 32 個通道。
- 輸出特征:32 個?\(220 \times 220\)?的特征圖,每個通道對應中級特征
4. 第三層卷積(組合中級特征為高級特征)
- 輸入通道:32(第二層輸出的 32 種中級特征)
- 卷積核設置:64 個卷積核,每個尺寸為?\(3 \times 3 \times 32\)
- 操作邏輯:每個卷積核整合 32 種中級特征(比如:“角點 + 斑點 + 短線條” 的特定組合),輸出代表更復雜模式的特征圖。
- 輸出特征:64 個?\(218 \times 218\)?的特征圖,每個通道對應高級特征:
- 通道 0:“眼睛”(圓形斑點 + 周圍的邊緣輪廓)
- 通道 1:“車輪”(圓形紋理 + 輻射狀線條)
- 通道 2:“文字筆畫”(特定方向的線條組合)
- ...(64 種接近 “物體部件” 的特征)
多層多通道的核心機制:特征的 “層級抽象” 與 “通道協同”
層級抽象:
淺層(1-2 層)→ 低級特征(邊緣、紋理、顏色)
中層(3-4 層)→ 中級特征(角點、斑點、局部部件)
深層(5 層以上)→ 高級特征(物體部件、整體輪廓)
每一層的特征都是上一層特征的 “組合與抽象”,就像從 “字母” 到 “單詞” 再到 “句子” 的過程。通道協同:
每個卷積核的深度 = 輸入通道數,意味著它能 “同時關注多個輸入特征”。例如,檢測 “眼睛” 的卷積核會重點關注:
- 輸入通道中 “圓形紋理” 的高響應區域
- 輸入通道中 “邊緣輪廓” 的閉合區域
- 輸入通道中 “膚色(特定顏色)” 的區域
這種多通道協同,讓網絡能學習 “特征之間的關聯”(比如 “圓形 + 閉合邊緣 + 膚色 = 眼睛”)。感受野擴大:
深層卷積的 “感受野”(能影響輸出的輸入區域)比淺層大。例如:
- 第一層 3×3 卷積的感受野是 3×3(只看 3×3 像素)
- 第二層 3×3 卷積的感受野是 5×5(因為它的輸入是第一層的 3×3 區域,對應原始圖像 5×5)
- 第三層 3×3 卷積的感受野是 7×7
這使得深層特征能捕捉更大范圍的局部信息,為組合高級特征提供基礎。
????????什么是感受野:
感受野(Receptive Field)?是指輸出特征圖上的一個像素點,對應輸入圖像(或前層特征圖)上的區域大小
用 “望遠鏡視野” 類比感受野
想象你用望遠鏡觀察風景:
- 當你用低倍鏡(類似 CNN 淺層卷積)時,視野小(感受野小),只能看清眼前的細節(如一片樹葉的紋理)。
- 當你換高倍鏡(類似 CNN 深層卷積)時,視野大(感受野大),能看到更大范圍的場景(如整棵樹的輪廓)。
CNN 中:
- 淺層卷積層的感受野小,只能 “看到” 輸入圖像的局部區域(如幾個像素組成的邊緣)。
- 深層卷積層的感受野大,能 “看到” 輸入圖像的更大范圍(如多個局部特征組合成的部件)。
感受野的意義:
特征層級與感受野的關系:
- 淺層(感受野小):捕捉邊緣、紋理等局部特征(如眼睛的輪廓、毛發的紋理)。
- 深層(感受野大):捕捉部件、整體等全局特征(如人臉的整體結構、汽車的輪廓)。
例如,在識別 “貓” 的任務中:
- 第 1 層可能檢測 “胡須的邊緣”(感受野 3×3)。
- 第 3 層可能檢測 “眼睛的形狀”(感受野 7×7)。
- 第 5 層可能檢測 “整個貓臉”(感受野 21×21)。
多層卷積代碼示例:
from matplotlib import pyplot as plt
import torch.nn as nn
import os
import torchimage_path= os.path.relpath('../data/彩色.png')
img_data = plt.imread(image_path)
#shape是(高,寬,通道)(H, W, C),要轉變為(N, C, H, W)---->先轉為(C, H, W),再轉(N, C, H, W)
print(img_data.shape)img_data =torch.tensor(img_data.transpose(2,0,1)).unsqueeze(0)print(img_data.shape)#卷積層
#進入時的形狀:(1,4,501,500)
conv1 = nn.Conv2d(in_channels=4,#輸入通道數(N,C, H, W)out_channels=16,kernel_size=3,stride=1,
)
#conv1輸出的形狀:(1,16,499,498)conv2 = nn.Conv2d(in_channels=16,out_channels=32,kernel_size=3,stride=1,
)
#conv2輸出的形狀:(1,32,497,496)conv3 = nn.Conv2d(in_channels=32,out_channels=1,kernel_size=3,stride=1,
)
#conv3輸出的形狀:(1,1,495,494)#conv傳入的參數是(N, C, H, W)
output = conv1(img_data)#輸出(N, C, H, W)
output = conv2(output)
output = conv3(output)
# print(output.shape)#還原成圖片
out = output.squeeze(0).data.numpy()#去掉batch維度,轉成numpy數組
out = out.transpose(1,2,0)
#繪圖
plt.imshow(out)
plt.show()
三、池化層
1、池化層的概述
池化層的核心思想是“下采樣”,通過對卷積層輸出的特征圖進行局部區域的聚合操作(如取最大值、平均值),在保留關鍵特征的同時,降低特征圖的尺寸和數據量。
可以把池化層類比為 “信息壓縮器”:卷積層提取的特征圖往往包含冗余信息(比如相鄰像素的特征響應很相似),池化層就像給特征圖 “降分辨率”,只保留每個局部區域中最關鍵的信息(如最強響應、平均響應)
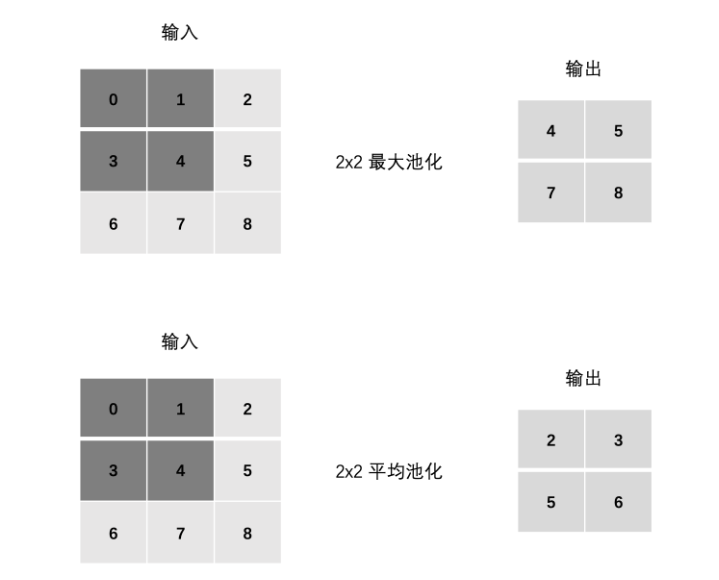
常見的池化方式有兩種:
- 最大池化(Max Pooling):取局部區域的最大值(最常用)。
- 平均池化(Average Pooling):取局部區域的平均值。
2、池化層的計算:
池化的計算邏輯與卷積類似:用一個固定大小的 “池化窗口” 在特征圖上按指定步長滑動,對窗口內的元素進行聚合操作,生成下采樣后的特征圖
和卷積一樣也有步長Stride、Padding
另外注意:在處理多通道輸入數據時,池化層對每個輸入通道分別池化,而不是像卷積層那樣將各個通道的輸入相加。這意味著池化層的輸出和輸入的通道數是相等。
3、池化層的作用
池化操作的優勢有:
通過降低特征圖的尺寸,池化層能夠減少計算量,從而提升模型的運行效率。
池化操作可以帶來特征的平移、旋轉等不變性,這有助于提高模型對輸入數據的魯棒性。
池化層通常是非線性操作,例如最大值池化,這樣可以增強網絡的表達能力,進一步提升模型的性能。
但是池化也有缺點:
池化操作會丟失一些信息,這是它最大的缺點;
import torch
import torch.nn as nndef test01():#設置隨機種子input_map = torch.randn(1, 1, 7, 7)print(input_map)print("-"* 50)pool1 = nn.MaxPool2d(kernel_size=2,stride=1,return_indices=True#是否返回索引)output,indices = pool1(input_map)print(output,indices)print("-"*50)def test02():input_map = torch.randn(1, 1, 7, 7)pool1 = nn.AvgPool2d(kernel_size=2,stride=1,)output = pool1(input_map)print(output.shape)def test03():input_map = torch.randn(1, 1, 7, 7)pool1 = nn.AdaptiveMaxPool2d(output_size=(3,3))if __name__ == '__main__':test01()test02()
運行結果:
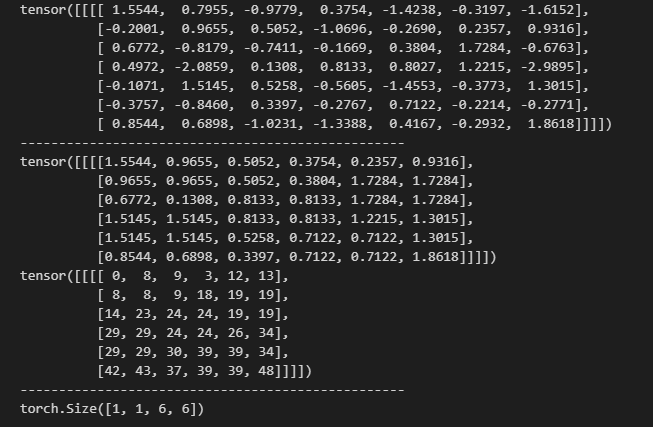
對于最大值池化。其返回值有兩個:output,indices
1.?output(輸出特征圖)
池化操作后的結果,即每個池化窗口中選出的最大值(對于最大池化)或平均值(對于平均池化)
2.?indices(索引)
在最大池化中,記錄每個池化窗口中最大值在原特征圖中的位置索引
四、自定義網絡
思路:
1、自定義網絡就是寫一個模型的類,首先定義一個類繼承于父類nn.Module
2、進行卷積操作,提取特征。定義三層卷積層,每一層進行一次池化和激活(經過池化后要算清楚輸出的圖像尺寸變化)
3、進行全連接,計算經過卷積池化操作后,總的像素點。這是全連接層特征的輸入值
4、前向傳播
5、調用模型
import torch
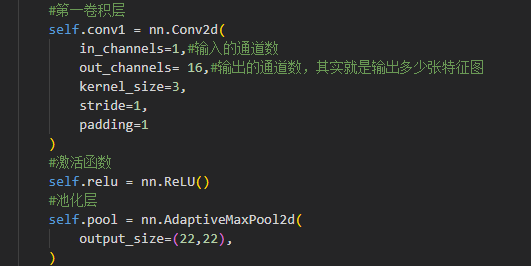
import torch.nn as nnclass MyModel(nn.Module):def __init__(self):super(MyModel, self).__init__()#第一卷積層self.conv1 = nn.Conv2d(in_channels=1,#輸入的通道數out_channels= 16,#輸出的通道數,其實就是輸出多少張特征圖kernel_size=3,stride=1,padding=1)#激活函數self.relu = nn.ReLU()#池化層self.pool = nn.AdaptiveMaxPool2d(output_size=(22,22),)#第二卷積層self.conv2 = nn.Conv2d(in_channels=16,out_channels=32,kernel_size=3,stride=1,padding=1)self.pool2 = nn.AdaptiveMaxPool2d(output_size=(16,16),)#全連接層(要判斷輸入特征就是計算像素點)self.fc1 = nn.Linear(in_features=32*16*16,out_features=10 #輸出類別數)def forward(self, x):#x(1,16,26,26)x =self.conv1(x)#x(1,16,22,22)x = self.pool(x)#x(1,32,20,20)x = self.conv2(x)#x(1,32,16,16)x = self.pool2(x)out = self.fc1(x.view(-1,x.size(1)*x.size(2)*x.size(3)))return outif __name__ == '__main__':input_data = torch.randn(1, 1, 28, 28)model = MyModel()output = model(input_data)print(output.shape)代碼講解:
此處的out_channels前面已經講過,就是卷積核的個數,經過卷積后輸出多少張特征圖
單純的卷積后,函數也還是線性關系,所以i需要激活函數
選用自適應池化
第一步經過卷積后,圖像的尺寸變成了(原圖像大小是28*28)26*26。
經過池化后,圖像的特征減少(也就是像素減少),尺寸就變成了22*22
第二層卷積與第一層類似
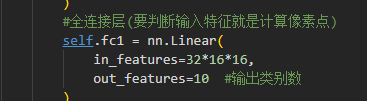
全連接層,用nn.Linear,其中輸入的特征值,其實就是經過卷積池化后,此時圖像的像素值(通道數*高*寬)
而輸出特征呢?因為我們目標是做10分類,所以最后訓練出來輸出的特征值就應該是10個類別
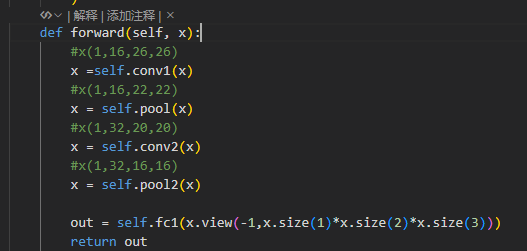
前向傳播,每次卷積和池化后,其x的形狀會發生改變,追蹤每次的改變。
為什么這么做:因為卷積神經網絡里,
conv(卷積)、pool(池化)層輸出的是?4 維張量?(N, C, H, W)?(N?批大小、C?通道、H?高、W?寬 ),但全連接層(nn.Linear?)要求輸入是?2 維張量?(N, feature_num)?(feature_num?是一維特征數量 )。所以必須用?view?把?(N, C, H, W)?轉成?(N, C*H*W)?,才能讓全連接層處理
-1?的含義:
讓 PyTorch 自動計算該維度的大小。比如?x.view(-1, A*B*C)?,-1?所在維度會被自動填充為?總元素數 / (A*B*C)?,保證元素總數不變。具體到代碼:
假設卷積、池化后,x?的形狀是?(N, C, H, W)?(N?是 batch 數、C?是通道數、H?高、W?寬 )。
執行?x.view(-1, x.size(1)*x.size(2)*x.size(3))?后:
- 第一個維度填?
-1?,PyTorch 會自動算出是?N(因為總元素數是?N*C*H*W?,第二個維度是?C*H*W?,所以?N = 總元素數 / (C*H*W)?)。- 第二個維度是?
C*H*W?,把每個樣本的?(C, H, W)?三維特征圖,壓成?長度為?C*H*W?的一維向量?。舉個實際例子:
如果?x?是?(2, 16, 22, 22)?(2 個樣本、16 通道、22 高、22 寬 ),執行?x.view(-1, 16*22*22)?:
- 第一個維度自動算成?
2(總元素數?2*16*22*22 = 15488?,16*22*22=7744?,15488 / 7744=2?)。- 第二個維度是?
7744?,最終形狀變成?(2, 7744)?

-正則化方法價格分類案例)





---自動識別設備,并導出配置)
初階繪圖)
:I2C 總線數據傳輸方向如何確定、信號線上的串聯電阻有什么作用?)



![[系統架構設計師]架構設計專業知識(二)](http://pic.xiahunao.cn/[系統架構設計師]架構設計專業知識(二))




:布局的實現——LayoutGroup的算法與實踐)
