在數據結構領域,二叉搜索樹(BST)憑借 O (log n) 的平均時間復雜度成為查找、插入和刪除操作的優選結構。但它有個致命缺陷:當輸入數據有序時,會退化為鏈表,時間復雜度驟降至 O (n)。為解決這一問題,計算機科學家設計了多種自平衡二叉搜索樹,紅黑樹(Red-Black Tree)便是其中應用最廣泛的一種。它通過巧妙的著色規則和有限的旋轉操作,在保證平衡的同時將維護成本降到最低,成為 STL 容器、Linux 內核等工業級系統的核心數據結構。本文將從底層原理到工程實踐,全面剖析紅黑樹的工作機制。
一、紅黑樹的核心特性與平衡原理
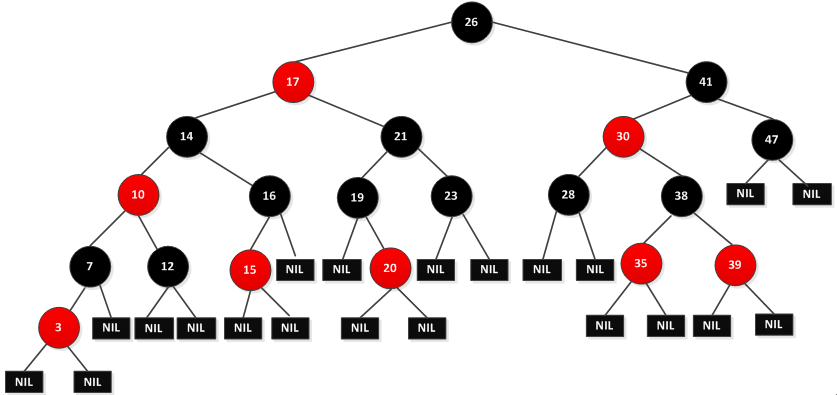
紅黑樹是一種自平衡二叉搜索樹,其每個節點除了存儲鍵值、左右子節點和父節點指針外,還額外包含一個顏色屬性(紅色或黑色)。通過嚴格遵循以下 5 條性質,紅黑樹實現了結構平衡:
- 顏色約束:每個節點要么是紅色,要么是黑色。
- 根節點規則:根節點必須是黑色。
- 葉子節點規則:所有葉子節點(NIL 節點,即空節點)都是黑色。
- 連續紅色禁止:如果一個節點是紅色,則它的兩個子節點必須是黑色(不存在連續的紅色節點)。
- 黑色平衡規則:從任意節點到其所有后代葉子節點的路徑中,包含的黑色節點數量相同(稱為 "黑高")。
平衡原理深度解析
這些特性共同構建了紅黑樹的 "平衡能力":
- 性質 4 避免了 "紅色鏈" 的無限延伸,限制了樹的傾斜程度;
- 性質 5 保證了所有路徑的 "黑高" 一致,而紅色節點僅能穿插在黑色節點之間;
- 由此可推導出關鍵結論:紅黑樹中最長路徑的長度不會超過最短路徑的 2 倍(最短路徑全為黑色節點,最長路徑為黑紅交替)。
這一結論直接確保了紅黑樹的高度始終為 O (log n),從而保證了所有操作的最壞時間復雜度為 O (log n)。
二、紅黑樹的節點結構與基礎定義
2.1 節點結構設計
紅黑樹的節點需要存儲 5 類信息:鍵值、顏色、左子節點、右子節點和父節點。為簡化邊界條件處理(如空節點的顏色判斷),通常將所有空節點統一指向一個哨兵節點(NIL 節點),該節點永久為黑色,且左右子節點和父節點均指向自身。
enum Color { RED, BLACK };// 節點結構定義
struct Node {int key; // 鍵值Color color; // 節點顏色Node *left; // 左子節點Node *right; // 右子節點Node *parent; // 父節點// 構造函數:新節點默認紅色(插入時優化)Node(int k) : key(k), color(RED), left(nullptr), right(nullptr), parent(nullptr) {}
};// 哨兵節點定義(全局唯一)
Node *NIL_NODE = new Node(0);
NIL_NODE->color = BLACK;
NIL_NODE->left = NIL_NODE;
NIL_NODE->right = NIL_NODE;
NIL_NODE->parent = NIL_NODE;
2.2 關鍵設計細節
- 哨兵節點的作用:將所有空指針替換為 NIL_NODE,避免在操作中頻繁判斷
nullptr,統一邊界處理邏輯; - 新節點默認紅色:插入紅色節點僅可能違反性質 4(連續紅色),而插入黑色節點會直接違反性質 5(黑高不一致),前者修復成本更低;
- 父節點指針的必要性:紅黑樹的旋轉和修復操作需要回溯到祖先節點,必須通過父指針實現向上遍歷。
三、紅黑樹的核心操作:插入與修復
3.1 插入流程
紅黑樹的插入操作分為兩步:
- 按 BST 規則插入:找到合適位置插入新節點(默認紅色);
- 修復紅黑樹性質:通過旋轉和變色消除對紅黑樹性質的破壞。
插入核心代碼(BST 部分
void insert(Node *&root, int key) {Node *z = new Node(key);Node *y = NIL_NODE; // 記錄x的父節點Node *x = root;// 查找插入位置while (x != NIL_NODE) {y = x;if (z->key < x->key) {x = x->left;} else {x = x->right;}}// 確定新節點的父節點z->parent = y;if (y == NIL_NODE) {root = z; // 樹為空,新節點成為根} else if (z->key < y->key) {y->left = z;} else {y->right = z;}// 初始化新節點的子節點為哨兵z->left = NIL_NODE;z->right = NIL_NODE;z->color = RED; // 新節點默認紅色// 修復紅黑樹性質insertFixup(root, z);
}
3.2 插入后的修復操作(insertFixup)
插入紅色節點后,可能違反的性質為:
- 性質 2(根節點為紅色):僅當插入的是第一個節點時可能發生;
- 性質 4(連續紅色節點):當父節點為紅色時發生。
修復過程通過循環處理,直到上述性質均被滿足。根據 "叔節點"(父節點的兄弟節點)的顏色,分為 3 種情況:
情況 1:叔節點為紅色
- 場景:新節點(z)的父節點(p)為紅色,叔節點(u)為紅色;
- 破壞性質:僅可能違反性質 4(連續紅色);
- 修復邏輯:
- 將父節點(p)和叔節點(u)改為黑色;
- 將祖父節點(g)改為紅色;
- 令 z = g,繼續向上修復(祖父節點可能與它的父節點形成連續紅色)。
// 情況1:叔節點為紅色
case 1:z->parent->parent->left->color = BLACK; // 叔節點變黑z->parent->parent->right->color = BLACK; // 父節點變黑z->parent->parent->color = RED; // 祖父節點變紅z = z->parent->parent; // 向上追溯break;
情況 2:叔節點為黑色,且新節點是右孩子
- 場景:父節點(p)為紅色,叔節點(u)為黑色,z 是右孩子;
- 破壞性質:性質 4(連續紅色);
- 修復邏輯:
- 對父節點(p)執行左旋,將 z 轉為左孩子;
- 轉化為情況 3 處理(統一修復邏輯)。
// 情況2:叔節點為黑色,z是右孩子
case 2:z = z->parent; // z指向父節點leftRotate(root, z); // 左旋父節點// 轉化為情況3
情況 3:叔節點為黑色,且新節點是左孩子
- 場景:父節點(p)為紅色,叔節點(u)為黑色,z 是左孩子;
- 破壞性質:性質 4(連續紅色);
- 修復邏輯:
- 對祖父節點(g)執行右旋;
- 交換父節點(p)和祖父節點(g)的顏色;
- 修復完成(無需繼續向上追溯)。
// 情況3:叔節點為黑色,z是左孩子
case 3:z->parent->color = BLACK; // 父節點變黑z->parent->parent->color = RED; // 祖父節點變紅rightRotate(root, z->parent->parent); // 右旋祖父節點z = root; // 退出循環break;
3.3 旋轉操作的實現
旋轉是紅黑樹維護平衡的核心手段,分為左旋和右旋,作用是改變節點間的父子關系而不破壞 BST 性質。
左旋操作(leftRotate)
void leftRotate(Node *&root, Node *x) {Node *y = x->right; // y是x的右子節點x->right = y->left; // 將y的左子樹轉為x的右子樹if (y->left != NIL_NODE) {y->left->parent = x; // 更新y左子樹的父節點}y->parent = x->parent; // 更新y的父節點// 處理x是根節點的情況if (x->parent == NIL_NODE) {root = y;} else if (x == x->parent->left) {x->parent->left = y; // x是左孩子時,y替代x的位置} else {x->parent->right = y; // x是右孩子時,y替代x的位置}y->left = x; // x成為y的左孩子x->parent = y; // 更新x的父節點
}
右旋操作(rightRotate)
右旋與左旋對稱,核心是將左子節點提升為父節點,此處不再贅述。
四、紅黑樹的刪除操作與修復
刪除操作是紅黑樹中最復雜的部分,核心挑戰是如何在刪除節點后維持紅黑樹的 5 條性質。刪除流程分為 3 步:
- 按 BST 規則刪除節點:找到待刪除節點,根據節點的子節點數量(0、1、2)執行不同刪除邏輯;
- 記錄關鍵信息:跟蹤 "替代節點"(實際被移除的節點)及其原始顏色;
- 修復紅黑樹性質:若刪除的是黑色節點,需通過修復流程恢復平衡。
4.1 BST 刪除邏輯
- 葉子節點(無孩子):直接刪除;
- 單孩子節點:用子節點替代該節點;
- 雙孩子節點:找到中序后繼(右子樹最小節點),復制其值到當前節點,再刪除后繼節點(轉化為前兩種情況)。
4.2 刪除后的修復操作(deleteFixup)
刪除節點后,若被刪除節點是黑色,會破壞性質 5(黑高不一致),此時需要通過 "雙重黑色" 標記來修復。"雙重黑色" 表示該路徑上缺少一個黑色節點,需要通過以下 4 種情況消除:
情況 1:兄弟節點為紅色
- 場景:當前節點(x)為雙重黑色,兄弟節點(s)為紅色;
- 修復邏輯:
- 將兄弟節點(s)改為黑色,父節點(p)改為紅色;
- 對父節點(p)執行左旋;
- 轉化為其他情況(兄弟節點變為黑色)。
情況 2:兄弟節點為黑色,且兄弟的兩個孩子均為黑色
- 場景:x 為雙重黑色,s 為黑色,s 的左右孩子均為黑色;
- 修復邏輯:
- 將兄弟節點(s)改為紅色;
- 令 x = p(將雙重黑色上移);
- 繼續向上修復。
情況 3:兄弟節點為黑色,左孩子紅色,右孩子黑色
- 場景:x 為雙重黑色,s 為黑色,s 的左孩子紅、右孩子黑;
- 修復邏輯:
- 將 s 的左孩子改為黑色,s 改為紅色;
- 對 s 執行右旋;
- 轉化為情況 4。
情況 4:兄弟節點為黑色,右孩子為紅色
- 場景:x 為雙重黑色,s 為黑色,s 的右孩子為紅色;
- 修復邏輯:
- 將 s 的顏色改為 p 的顏色;
- 將 p 改為黑色,s 的右孩子改為黑色;
- 對 p 執行左旋;
- 令 x = root(修復完成)。
4.3 修復操作的核心目標
- 消除 "雙重黑色" 標記,恢復路徑上的黑高平衡;
- 避免出現連續紅色節點,維持性質 4;
- 通過最少的旋轉和變色操作完成修復,降低時間開銷。
五、紅黑樹與 AVL 樹的深度對比
| 特性 | 紅黑樹 | AVL 樹 |
|---|---|---|
| 平衡標準 | 顏色規則 + 黑高平衡 | 左右子樹高度差≤1(嚴格平衡) |
| 旋轉次數 | 插入最多 2 次,刪除最多 3 次 | 插入最多 2 次,刪除可能 O (log n) |
| 空間開銷 | 存儲顏色(1bit) | 存儲平衡因子(通常需 2-4bit) |
| 查找性能 | 平均 O (log n),最壞 O (2log n) | 嚴格 O (log n)(高度更優) |
| 插入 / 刪除性能 | 更優(旋轉少) | 較差(嚴格平衡導致旋轉頻繁) |
| 適用場景 | 插入刪除頻繁的場景(如 STL 容器) | 查找頻繁的場景(如數據庫索引) |
紅黑樹的工業級優勢:在大多數實際場景中,紅黑樹的綜合性能優于 AVL 樹。雖然 AVL 樹的高度更優,但紅黑樹的旋轉操作更少,維護成本更低,尤其適合插入刪除頻繁的動態數據場景。
六、紅黑樹的實際應用場景
- C++ STL 容器:
std::map、std::set、std::multimap等關聯容器底層均采用紅黑樹實現,利用其 O (log n) 的插入、刪除和查找性能; - Linux 內核:
- 進程調度:CFS(完全公平調度器)用紅黑樹管理進程運行隊列,快速找到下一個待調度進程;
- 虛擬內存管理:VM_area_struct 結構體用紅黑樹組織,高效管理內存區域;
- Java 集合框架:
TreeMap、TreeSet底層基于紅黑樹,提供有序映射和集合功能; - 數據庫:部分數據庫(如 MongoDB)的索引結構采用紅黑樹,平衡查詢和更新性能;
- 編譯器實現:語法分析階段的符號表常用紅黑樹存儲變量和函數信息,支持快速查找和插入。












外參數匹配)



)


