目錄:
一、人工股肉的不同種類及工作原理和比較優勢
二、人工肌肉研發的重點難點及成果進展和趨勢
三、人工肌肉主要研發機構及其研發成果
四、人工肌肉主要性能檢測表征能力及標準體系建設
五、人工肌肉主要制造商及其產品性能優勢和供應能力
六、人工肌肉在機器人市場應用現狀及變化趨勢
七、人工機器人核心專利分析
八、一款超生物肌肉(人形機器人用)人工股肉設計
一、人工股肉的不同種類及工作原理和比較優勢
人工肌肉(Artificial Muscles)是一類模仿生物肌肉收縮機制的人工驅動系統,旨在實現柔韌性、高功率密度、快速響應及能量高效轉化。
(一)人工肌肉的主要種類及工作原理
1. 氣動人工肌肉(Pneumatic Artificial Muscles, PAM)
原理:通過氣壓變化使彈性腔體(如硅膠或纖維增強復合材料)收縮,模仿肌肉的膨脹-收縮機制。充氣時腔體徑向膨脹、軸向縮短,產生拉力。
典型應用:波士頓動力Atlas機器人的關節驅動、康復外骨骼。
2. 電活性聚合物(Electroactive Polymers, EAP)
介電彈性體(DEA):在電場作用下厚度壓縮、面積擴展,產生形變(如丙烯酸彈性體),響應速度達毫秒級。
離子型聚合物(IPMC):離子遷移導致材料彎曲變形(如Nafion膜),需濕潤環境,適用于水下場景。
代表技術:浙大團隊開發的仿水母人工肌肉,結合水凝膠與DEA,實現83.3%含水量和毫秒級響應,用于無線水下機器人。
3. 形狀記憶合金(Shape Memory Alloys, SMA)
原理:溫度變化引發材料相變(馬氏體?奧氏體),產生收縮力。常用鎳鈦合金(Nitinol),功率密度高達300 W/kg。
應用:航天器可展開結構、醫用支架。
4. 碳基納米材料驅動
原理:電場或光熱刺激引發碳納米管(CNT)或石墨烯膨脹/收縮,響應速度達微秒級。
特點:超高響應速度,但制備成本高,適用于精密光學器件。
(二)不同種類人工肌肉的性能對比
以下為四類人工肌肉與生物肌肉的關鍵性能指標比較:

四類人工肌肉與生物肌肉的關鍵性能指標
(三)各類人工肌肉的優勢與不足
1. 氣動人工肌肉(PAM)
??優勢:功率密度最高(~400 W/kg)、柔順性好、成本低。
??不足:依賴氣泵系統,響應較慢(>50 ms),體積龐大,需密封結構限制便攜性。
2. 電活性聚合物(EAP)
??優勢:DEA應變率超高(300%)、效率達80%,靜音且響應快(毫秒級);IPMC適合水下環境,柔軟透明(如浙大仿水母肌肉實現水下偽裝)。
??不足:DEA需高壓電源(千伏級),電極易老化;IPMC驅動力弱,推力不足。
3. 形狀記憶合金(SMA)
??優勢:功率密度高(~300 W/kg)、無噪音,適合高力輸出場景。
??不足:響應速度慢(秒級)、循環壽命低(約10?次),效率僅5~10%。
4. 碳基納米材料
??優勢:響應速度最快(微秒級),耐疲勞性優異。
??不足:制備工藝復雜,成本高昂,尚未大規模應用。
(四)總結:
1. 前沿突破與未來方向
混合驅動系統:結合DEA快速響應與SMA高力輸出(如仿生手指力密度提升3倍);光熱驅動石墨烯實現無線控制(應變率15%/s,壽命>10?次)。
生物混合肌肉:采用工程化心肌細胞+柔性支架,實現自主收縮(如哈佛大學“鰩魚機器人”);神經信號控制SMA,提升假肢自然運動能力(DARPA項目)。
自供能技術:摩擦納米發電機(TENG)將機械能轉為電能,驅動DEA無限續航(仿生水母)。光合驅動水凝膠(葉綠體嵌入),實驗室階段實現光能轉化。

毫秒級響應的柔性人工肌肉
2. 小結
人工肌技術正從實驗室走向產業,其核心價值在于突破傳統剛性執行器的局限。未來趨勢聚焦于混合驅動提升性能(如DEA+SMA)、生物融合增強適應性(如細胞驅動)、以及可降解材料(纖維素基EAP)降低環境負擔。隨著4D打印與腦機接口技術的發展,人工肌肉有望在深空探測、深海作業及醫療康復領域重塑人機協作邊界。
具有穩定結構多功能性水驅人造肌肉示意
二、人工肌肉研發的重點難點及成果進展和趨勢
人工肌肉作為仿生驅動技術的核心,近年來在材料科學、機器人學和醫療工程等領域取得顯著突破,但仍面臨多重挑戰。
(一) 研究重點
1. 材料體系創新
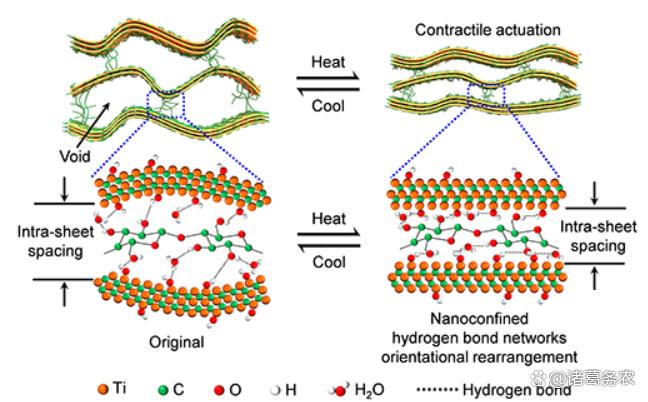
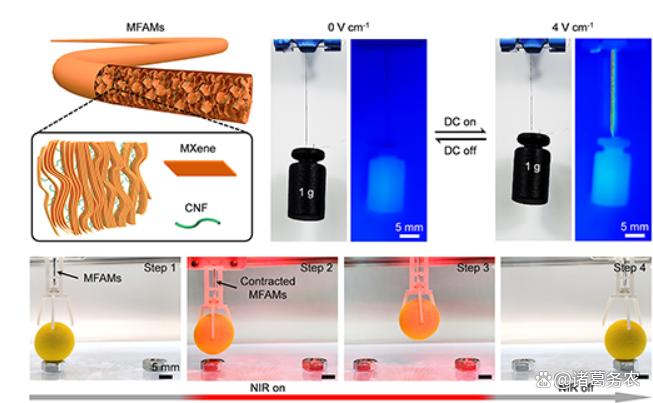
MXene基復合纖維:通過徑向取向排列MXene納米片與纖維素(CNFs),利用氫鍵網絡調控層間距,實現熱/電/光多重刺激響應,收縮率達21%,提重能力超自重1000倍,做功密度達1.76 J/g(自然肌肉的45倍)。
晶格編程超材料:洛桑聯邦理工學院(EPFL)通過拓撲調控晶格幾何(如混合體心立方與XCube單元),單一彈性樹脂實現楊氏模量25–300 kPa梯度變化,150克結構舉起500克重物,模擬肌肉-骨骼力學行為。
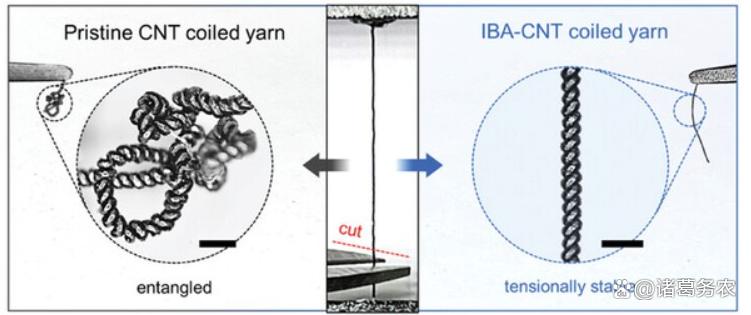
碳納米管(CNT)功能化:漢陽大學通過注入PEDOT:PSS穩定碳納米管束結構,抑制扭轉崩塌
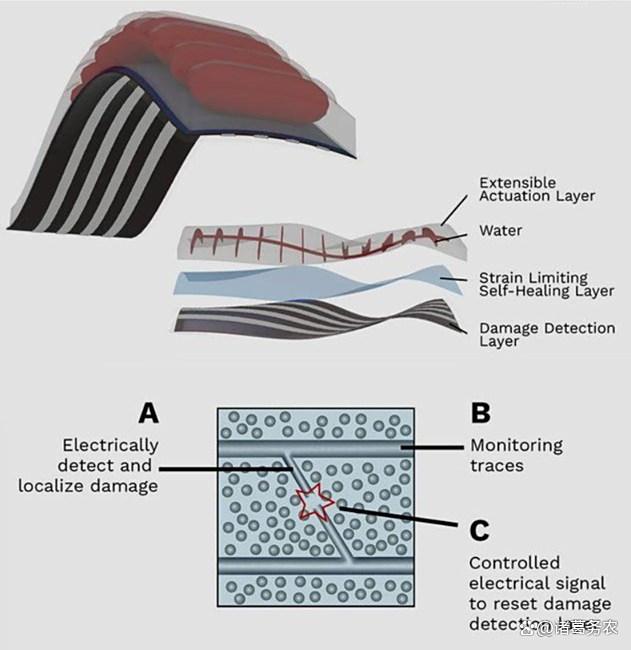
自修復材料:內布拉斯加大學開發三層結構人工肌肉,底層液態金屬微滴檢測損傷,中層熱塑性彈性體通過焦耳熱自主修復穿刺損傷。

人工肌肉材料性能突破
2. 結構設計與驅動機制優化
仿生纖維排布:MXene復合纖維采用徑向取向結構,避免傳統扭轉工藝導致的穩定性問題,收縮行程達21%。
無芯軸制造工藝:得克薩斯大學團隊開發聚合物纖維先扭轉后捻合技術,無需芯軸實現彈簧指數>50、收縮率>97%,解決了傳統工藝廢料多、成本高的問題,適用于可調絕緣夾克與機器人關節。
3. 智能系統集成
感知-驅動一體化:MXene復合纖維兼具焦耳熱與光熱響應,編織為假肢抓手后可實現近紅外光控抓取6;ESRA(電強化帶狀致動器)通過介電泳液體拉鏈機制,實現<10 ms的剛度與阻尼調節,模仿生物肌肉粘彈性8。。
人機協同控制:無錫量產“肌肉外甲”搭載30余傳感器,通過機器學習預測動作意圖,輔助腦卒中患者步態訓練,6分鐘步行距離提升47%。
MXene復合纖維人工肌肉收縮驅動機理圖
(二)技術難點
1. 耐久性與穩定性
傳統氣動肌肉橡膠內膽耐疲勞性僅10?–10?次(需求>10?次),且滯后效應導致控制誤差±5%;扭轉結構人工肌肉易發生松脫或崩塌,需外部固定裝置,限制實際應用。
2. 能效與響應性能
氣動肌肉系統效率僅30–50%,遠低于電機(>80%);響應速度受氣路限制(>50 ms);形狀記憶合金(SMA)驅動速度慢(秒級),效率不足10%。
3. 系統集成復雜度
氣動/液壓依賴外部泵閥,便攜性差;電化學驅動需濕潤環境,應用場景受限;多材料集成界面應力集中,易分層失效(如3D打印軟樹脂層間結合強度低)。
(三)成果進展
人工肌肉的進展,最終還是要依賴材料和材料技術的突破,除高性能材料技術突破以外,目前在結構創新和應用方面進展如下:
1. 結構創新與制造工藝
晶格編程肌肉骨骼和大象機器人,無芯軸聚合物肌肉等技術的應用。水凝膠生物打印海藻酸鈉-明膠-纖維蛋白原水凝膠具剪切稀化特性,支持復雜肌肉結構打印。模量可調,范圍覆蓋軟組織需求。
3. 應用落地
肌肉外甲量產化:無錫產線實現輕量化(2公斤)、低能耗(凈能耗降40%)外骨骼,助力腦卒中患者恢復日常活動能力。
人工肌腱支架:曼徹斯特大學開發生物降解納米纖維支架,促肌腱再生,3年內有望臨床。
大彈簧因子人工肌肉的多樣化應用
(四)發展趨勢
1. 醫療康復深化應用
神經重塑干預:肌肉外甲結合AI算法,實時補足患者運動功能缺失,加速神經通路重建。
可降解植入設備:聚乳酸(PLA)/聚己內酯(PCL)人工肌腱支架推動微創手術革新。
2. 材料智能化與多功能集成
刺激響應多元化:光/熱/電/濕度多場耦合驅動(如MXene纖維光熱轉換效率>80%)。
自供能系統:摩擦納米發電機(TENG)收集機械能驅動人工肌肉,實現無限續航。
3. 制造工藝革新
4D打印梯度材料:硬-軟模量漸變結構減少應力集中(如EPFL拓撲指數調控)。
卷對卷大規模生產:北航團隊開發MXene薄膜連續化制備技術,降低成本。
4. 混合驅動與系統微型化
氣動-電熱混合:哈佛微型機器人集成壓電陶瓷氣泵(尺寸<1 cm3),消除外部管。
人機融合控制:腦機接口+人工肌肉實現意念驅動假肢(DARPA項目推進)。
(五)小結
人工肌肉研究正從單一驅動向智能響應-自愈合-環境自適應系統躍遷。短期突破聚焦材料耐久性提升(如自修復彈性體)與制造降本(無芯軸工藝);長期趨勢在于神經接口融合與生物混合驅動(工程化心肌細胞)。隨著人形機器人、精準醫療需求爆發,人工肌肉將在5–10年內重塑康復醫療、具身智能及太空探測的技術邊界。
MXene復合纖維人工肌肉
三、人工肌肉主要研發機構及其研發成果
(一)材料創新與結構設計
1. 北京航空航天大學 & 中國科大蘇州高研院
主攻MXene基復合纖維人工肌肉的徑向取向結構設計。首創徑向排列MXene/纖維素復合纖維,通過氫鍵調控層間距,實現熱/電/光多重刺激響應。性能指標:收縮率21%,提重能力達自重1000倍,做功密度1.76 J/g(自然肌肉的45倍)。可應用于光熱驅動假肢手臂(4根纖維驅動2000倍自重物體)及智能抓手。
2. 洛桑聯邦理工學院(EPFL, CREATE實驗室)
主攻方向單一材料晶格拓撲編程實現“肌肉-骨骼”一體化。通過體心立方(bcc)與XCube晶格混合設計,彈性樹脂實現楊氏模量25–300 kPa梯度變化,覆蓋軟組織至軟骨剛度。已應用于仿象機器人。
3. 美國內布拉斯加大學林肯分校
主攻自修復人工肌肉系統。采用三層結構設計:液態金屬微滴檢測層 + 熱塑性彈性體自愈層 + 液壓驅動層,損傷后通過焦耳熱修復。主要用于農業機器人抗穿刺系統,循環壽命提升300%。
(二)生物混合驅動系統
1. 日本東京大學 & 早稻田大學
主攻人類肌肉組織驅動的生物混合機械手。研發全球最大生物混合機械手(18厘米),采用“壽司卷”式肌肉纖維束設計,解決營養供給問題。性能達到五指獨立運動,抓取后肌肉力量可恢復(需間歇休息)。
2.《SCIENCE ADVANCES》聯合團隊(2025)
主攻強直刺激驅動的肌肉環增強型驅動器。通過優化肌肉環結構:高剛度支撐柱 + 低ECM密度,收縮力達2.6mN(20Hz電刺激)。用于夾持機器人,彎曲角度提升1.6倍;用于蠕動機器人10秒前進8.8mm。
(三) 輕量化與多功能集成
1. 三星電子 & 韓國亞洲大學
主攻形狀記憶合金(SMA)微型致動器。開發順應力放大SMA致動器(CASA),重量0.22克舉重800倍自重。應用gf AR眼鏡光學調焦(解決視覺輻輳沖突)及超薄觸覺手套。
2. 哈佛大學Wyss研究所
主攻工程化心肌細胞驅動系統,代表成果:“鰩魚機器人”心肌細胞+水凝膠支架,實現自主收縮游動。

主要研發機構研究方向與成果對比
(四)前沿趨勢與挑戰
1. 跨學科融合加速
生物-機械接口:日本團隊肌肉營養供給設計、強直刺激驅動多關節協調;
材料-AI協同:EPFL晶格生成算法(超7500萬種結構)。
2. 性能瓶頸突破方向
耐久性:傳統氣動肌肉壽命僅10?–10?次 → 自修復技術目標10?次;
能效:SMA效率<10% → MXene光熱轉換效率>80%;
集成度:北航MXene纖維編織性 → 解決假肢多自由度控制難題。
3. 應用場景拓展
醫療:曼徹斯特大學可降解人工肌腱支架(3年內臨床);
消費電子:三星CASA驅動AR/VR觸覺反饋;
極端環境:自修復肌肉用于農業機器人。
具有自修復功能的人工肌肉
(五)總結
全球人工肌肉研發呈現?“材料革新驅動應用落地”?的格局:
東亞(中/日/韓):聚焦高性能復合材料(MXene纖維)與生物混合系統,突破驅動效率與仿生適配性;
歐美:主導結構創新(晶格編程)與智能響應(自修復、SMA微型化),解決系統可靠性與集成瓶頸。
未來競爭將集中于?“生物兼容性”(可降解植入)與?“神經接口融合”(腦機控制),推動人工肌肉從實驗室走向醫療康復、具身智能及太空探測場景。
四、人工肌肉主要性能檢測表征能力及標準體系建設
(一) 人工肌肉核心性能參數指標
人工肌肉性能需從力學、動態響應、環境適應性及耐久性多維度評估:
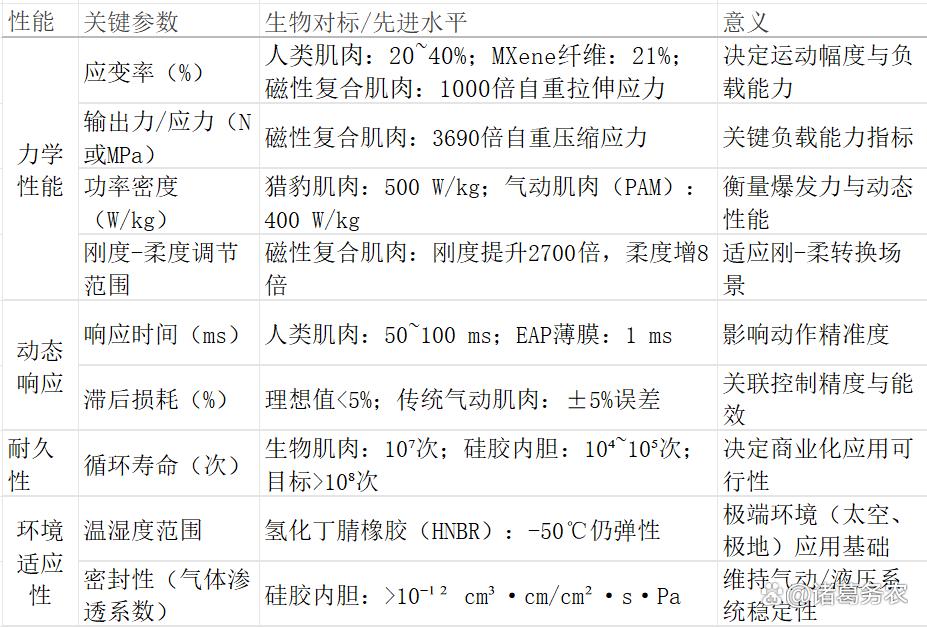
人工肌肉核心主要性能參數指標
(二) 試驗、檢測及表征技術與設備進展
1. 多場景測試裝置創新—— 環境適應性測試:
南通常溯智能裝備專利(CN120194759A)開發柔性人工肌肉測試系統,集成藍牙傳輸的模型構建、預測與安全評估單元,支持大氣/水環境自動切換測試,提升效率與安全性。
多自由度調節裝置:可旋轉、平移夾持機構,結合位移/力傳感器動態追蹤形變,解決IPMC材料在干燥/潮濕環境下的同步測試難題。
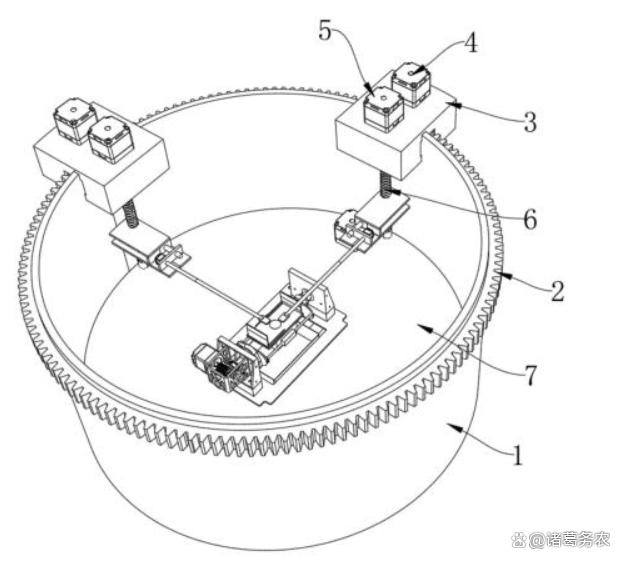
一種人工肌肉材料性能測試裝置
2. 高性能表征技術
電化學驅動測試:鋁離子電池體系測試裝置:監測電化學肌肉纖維(如碳納米管)在充放電過程中的收縮保持特性(450s內衰減近零),同步記錄位移與儲能效率。
智能反饋系統:石墨烯涂層或液態金屬電路:實時監測應變(精度±0.5%),如Festo氣動肌肉集成自感知功能。
3. 智能化與自動化平臺
AI驅動的材料數據庫:上海大學團隊構建全球首個開放式人工肌肉材料數據庫,結合深度學習預測介電彈性體(DE)性能,加速新材料研發周期。
公共檢測平臺:北京人形機器人創新中心推出具身智能檢測平臺,覆蓋零部件耐久性、整機場景適應性測試,支持工業、養老等多場景驗證,并推動CNAS/CMA認證。
(三)人工肌肉標準體系建設進展
1. 行業標準化痛點
碎片化問題:企業自建測試設備導致數據不可比,如人形機器人關節扭矩缺乏統一基準。
技術路徑差異:氣動、EAP、SMA等驅動方式性能指標各異,難以統一評價體系。
2. 標準制定動態
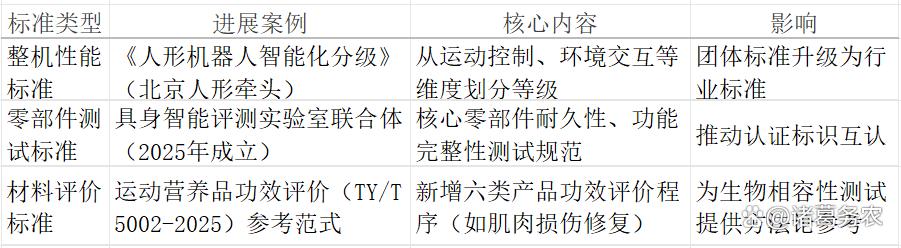
人工肌肉標準制定動態
3.?未來建設方向
跨領域協同:借鑒醫療設備ISO 13485認證體系,建立人工肌肉生物相容性標準(如可降解材料PLA/PCL)。
國際互認:北京人形推動測評基地對接國際標準,計劃2026年前完成CMA認證,助力中國企業出海。
場景化標準庫:構建工業、醫療、家庭等場景的專用測試任務庫(如物流搬運重復動作、手術精細操作)。
(四)總結:技術瓶頸與突破路徑
1. 性能瓶頸:
耐久性(壽命<10?次)與能效(氣動系統僅30~50%)仍是主要挑戰。
2. 檢測技術趨勢:
短期:多環境集成裝置(如常溯測試系統)降低研發成本;
長期:AI+物理智能模型(如上海大學數據庫)驅動材料逆向設計3。
3. 標準體系路徑:
“零部件-整機-場景”三級框架加速落地,2026年后有望形成全球互認體系。
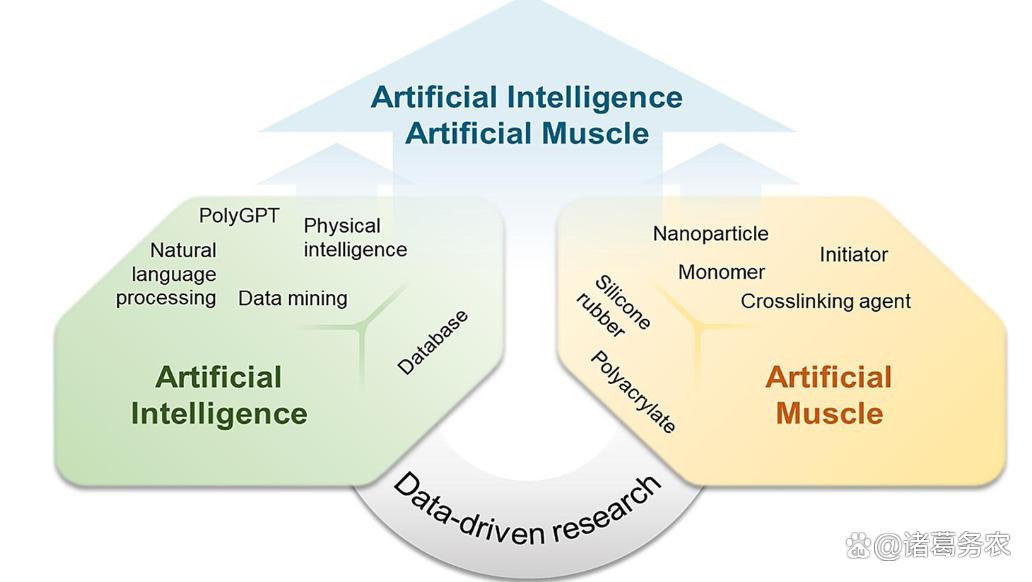
人工智能人工肌肉
五、人工肌肉主要制造商及其產品性能優勢和供應能力
(一) 醫療領域領先企業
1. ?ssur(冰島)
產品與技術:主打智能仿生假肢(如PROPRIO FOOT),采用電活性聚合物(EAP)和氣壓驅動系統。
性能優勢:動態響應速度<100ms,步態自適應精度達±0.1°;生物相容性涂層降低排異反應,通過ISO 13485醫療認證。
供應能力:全球假肢市場份額超30%,年產能10萬套以上,覆蓋80+國家。
2. Blatchford(英國)
產品與技術:下肢外骨骼“Linx Limb System”,集成SMA(形狀記憶合金)與氣動混合驅動。
性能優勢:功率密度達300 W/kg,支持8小時連續行走;多傳感器實時反饋,步態誤差<3%。
供應能力:歐洲醫療市場占有率25%,工業外骨骼年交付量超5000套。
3. Innophys(日本)
產品與技術:氣動外骨骼“MUSCLE SUIT”,無電力純氣動設計。
性能優勢:背部分擔負荷>30kg,續航無限制(氣罐可手動充氣);重量僅4kg,適用工廠、護理場景。
供應能力:全球累計銷量破2萬套,亞洲市占率第一,支持定制化批量交付。
(二) 工業與消費電子領域創新企業
1. Bayer(Artificial Muscle, Inc. 美國)
產品與技術:EAP薄膜致動器,用于觸覺反饋(如手機振動模組)。
性能優勢:響應速度1ms,壽命>100萬次循環;厚度<0.1mm,可集成至柔性屏。
供應能力:消費電子領域份額50%,三星、蘋果核心供應商,月產能百萬片。
2. 三星電子(韓國)
產品與技術:SMA微型致動器“CASA”,應用于AR眼鏡光學調焦。
性能優勢:0.22克舉重800倍自重,精度±0.01mm;功耗比電機降低70%。
供應能力:2024年量產交付,年產能500萬件,主要供應穿戴設備廠商9。
3. Festo(德國)
產品與技術:氣動肌肉(PAM)仿生機器人,如仿生象鼻。
性能優勢:輸出力15kN,柔順性媲美生物肌肉;石墨烯涂層實現自感知應變(精度±0.5%)。
供應能力:工業自動化領域龍頭,支持小批量定制(≥100套)3。
(三) 科研機構與前沿技術轉化主體
1. 美國得克薩斯大學達拉斯分校 + 中國東華大學
技術成果:殼層驅動人工肌肉(碳納米管/尼龍復合)。
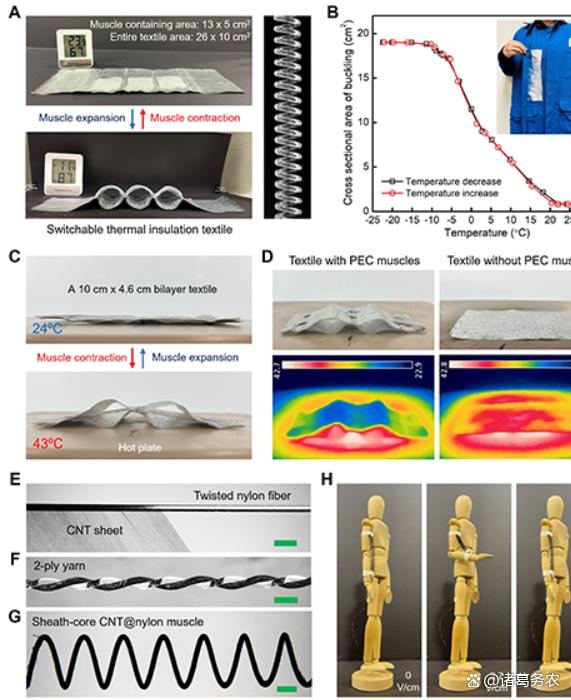
性能優勢:收縮力達人體肌肉40倍,能耗降低50%;支持濕度/葡萄糖響應,適用于智能織物與藥物緩釋。
轉化進展:東華大學開發智能調溫衣物,已與恒瑞醫藥合作醫療應用。

MIT熱漲冷縮原理人造肌肉
2. MIT(美國)
技術成果:熱驅動聚合物纖維肌肉(HDPE/COCe)。
性能優勢:成本僅6美分/米,提重650倍自重;耐疲勞>1萬次,適合低成本機器人。
轉化進展:正與波士頓動力合作倉儲機器人關節替代。

人工肌肉代表企業核心參數對比
(四)總結:技術路線與市場定位
醫療康復:?ssur、Blatchford 以高精度生物兼容主導,供應體系成熟;
工業/消費電子:Bayer、三星 聚焦微型化與高頻響應,大規模量產能力強;
前沿技術:高校研發機構(如MIT、東華大學)推動低成本、多刺激響應技術,部分進入產業化合作階段。
未來競爭核心在于?“生物相容性”(可植入設備)與?“能效比”(續航優化),中國企業如上海Pine&Power Biotech正通過仿生韌帶(年增長率11.75%)切入醫療細分市場。

人工肌肉手臂
六、人工肌肉在機器人市場應用現狀及變化趨勢
人工肌肉作為新型驅動技術,其應用領域正從醫療、工業向消費電子等多場景快速滲透,同時機器人領域的需求爆發正推動技術迭代與市場規模擴張。
(一)人工肌肉主要應用領域及需求變化
1. 醫療康復領域
1)核心應用:可植入人工肌腱、智能假肢、外骨骼等。
曼徹斯特大學開發的可降解納米纖維“織物”人工肌腱,通過手術植入促進肌腱再生,3年內有望臨床,解決運動員康復難題。?ssur的智能仿生假肢(如PROPRIO FOOT)采用EAP驅動,步態自適應精度±0.1°,年產能超10萬套,需求集中在生物相容性與運動精度。
2)需求變化:
從“替代功能”轉向 “神經重塑”:外骨骼結合AI預測患者意圖(如無錫產線產品助腦卒中患者步行距離提升47%)。
可降解材料需求上升:聚乳酸(PLA)/聚己內酯(PCL)人工肌腱推動微創手術革新。
2. 機器人領域
人形機器人:特斯拉Optimus、優必選Walker X等依賴人工肌肉實現仿生運動,2025年全球市場達300億美元,中國占35%; 需求聚焦 高功率密度(>400 W/kg)與本質柔順性,以提升動態動作(如跳躍、抓取)安全性。
工業與服務機器人:Festo氣動肌肉仿生象鼻輸出力達15kN,用于精密裝配;新松機器人餐飲服務方案每小時完成200份餐品,依賴高效驅動。
需求變化:從單一驅動轉向混合系統(如SMA+氣動),兼顧爆發力與能效;?自感知能力成新剛需:倫敦瑪麗女王大學研發的EAP肌肉可實時監測形變,提升控制精度。
3. 消費電子與可穿戴設備
觸覺反饋:Bayer的EAP薄膜用于手機振動模組,響應1ms、壽命>100萬次,月產能百萬片。
AR/VR交互:三星SMA微型致動器(CASA)驅動AR眼鏡光學調焦,功耗比電機低70%。
需求變化:輕薄化(如厚度<0.1mm)與低功耗成競爭焦點。
4. 航空航天與極端環境
耐輻照聚酰亞胺涂層肌肉用于太空探測,氫化丁腈橡膠(HNBR)適配-50℃極地作業。需求增量來自深空探測與軍事領域,強調環境魯棒性。
(二)機器人領域對人工肌肉的需求量及變化趨勢
1. 市場規模與增長動力

機器人領域人工肌肉市場規模與增長動力
增長引擎主要來自:老齡化催生護理機器人(亞太為主力),如ABB雙臂輔助機器人感知用戶肌力變化;中國《人形機器人創新發展指導意見》推動“肢體”關鍵技術突破。
2. 技術需求趨勢
高性能材料替代傳統執行器:氣動/EAP肌肉逐步取代電機,Atlas機器人采用氣動系統實現后空翻,功率密度達400 W/kg(超電機2倍);韓國磁性復合肌肉承重達自重3690倍,解決剛性-柔性平衡難題。
智能化與集成化升級:感知-驅動一體化,石墨烯涂層(Festo)或液態金屬電路實現應變監測±0.5%;混合驅動系統,Blatchford外骨骼集成SMA與氣動,功率密度300 W/kg,續航8小時。
成本與量產瓶頸突破:模塊化關節(節卡機器人)使維護成本降60%;華為邊緣算力方案降低本地計算需求50%;得州大學無芯軸紡絲工藝降本50%,推動聚合物肌肉規模化。
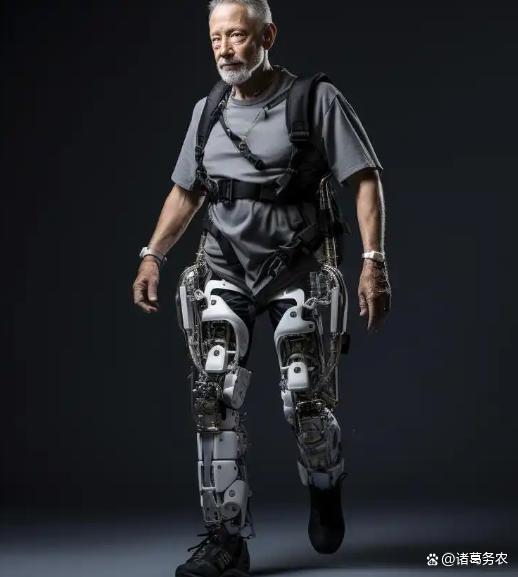
人工肌肉外骨骼
(三)總結:挑戰與未來方向
1. 挑戰與趨勢
耐久性提升:橡膠內膽壽命僅10?–10?次,目標需>10?次(自愈合材料是關鍵)。
系統輕量化:碳纖維骨骼(中科院技術)使人形機器人減重30%。
神經接口融合:DARPA推進腦控假肢,需人工肌肉適配生物電信號。
2. 小結
人工肌肉的核心應用正從功能替代邁向生物融合(如可降解肌腱),而機器人領域的需求爆發直接驅動技術向高功率密度、自感知、混合驅動演進。短期醫療與消費電子主導市場,長期人形機器人(2035年萬億規模)將成為最大增量,中國在政策與產業鏈協同下有望占全球份額36%以上。突破點在于材料耐久性與神經兼容性,這將是產業從實驗室邁向萬億級市場的關鍵階梯。

人工肌肉象鼻
七、人工機器人核心專利分析
(一) 技術路線分類與核心專利解析
1. 氣動人工肌肉(PAM)核心專利:
CN119871364A(西安工程大學):采用熱塑彈性體(TPU/TPE)分腔式氣囊單元,通過獨立氣壓控制實現彎曲、扭轉多自由度運動,體積縮減40%,響應速度提升30%。
CN120287280A(中國計量大學):驅控一體化自感知氣動肌肉,集成電感傳感層,實現0.01mm級長度實時監測,解決滯后效應控制難題。
優勢:高功率密度(>400 W/kg)、本質柔順性,適用于人形機器人關節。
2. 電活性聚合物(EAP)核心專利:
CN202110414531.5衍生機電臂(電力人工肌肉機械臂):藕節形絕緣堆疊電極設計,驅動電壓≥50V,響應時間1ms,支持生物電信號控制,應用于AR眼鏡調焦與觸覺手套。
Bayer EAP薄膜(消費電子):厚度<0.1mm,壽命>100萬次,月產能百萬片,主導手機觸覺反饋市場。
3. 形狀記憶合金(SMA)與混合驅動核心專利:
三星CASA微型致動器:0.22克舉重800倍自重,精度±0.01mm,用于AR眼鏡光學調焦,功耗比電機低70%。
繞軸回轉關節(特種機械臂):人工肌肉驅動滾珠絲杠,實現360°轉角,力放大3倍,輕量化設計(鋁合金+纖維)。
4. 纖維基人工肌肉核心專利:
無芯軸大彈簧因子肌肉(得克薩斯大學):彈簧指數>50,收縮率>97%,成本降50%,應用于自動調溫羽絨服與機器人關節。
多級螺旋聚合物纖維(CN120026419A):二級/三級螺旋結構協同增強驅動應變,退火工藝提升耐久性。
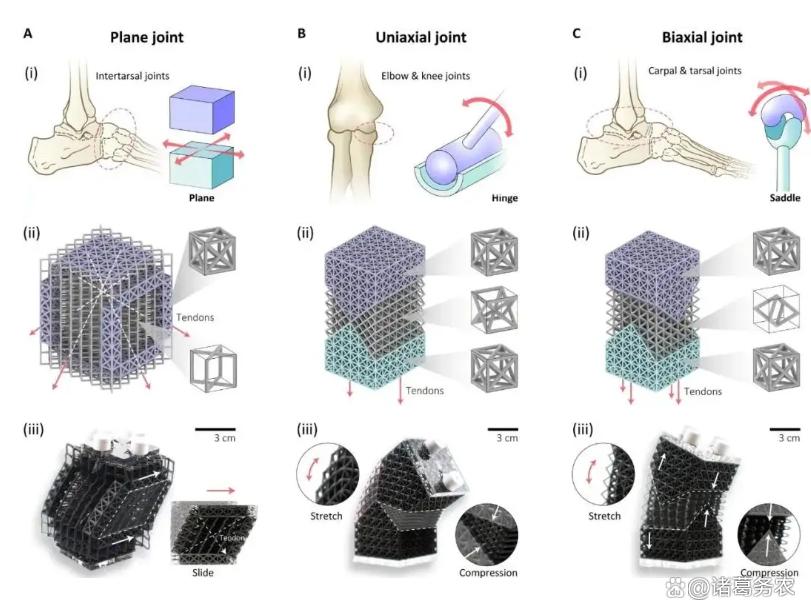
3D打印超材料在人工肌肉中的應用
(二) 應用領域專利布局
1.?醫療康復
?ssur仿生假肢:EAP驅動步態自適應(±0.1°精度),年產能10萬套,占全球市場30%。
可降解人工肌腱(曼徹斯特大學):PLA/PCL納米纖維支架,促肌腱再生,3年內臨床。
2.?人形機器人
武漢真友科技CN119642688A:人工肌肉長度測量裝置集成于關節,降低運動干擾,適配Optimus、Walker X等機型。
EPFL晶格編程象鼻:單一材料(彈性樹脂)通過拓撲調控實現模量梯度(25–300 kPa),150克結構承重500克,踢球力達4kg。
3.?工業與極端環境
Festo仿生象鼻:輸出力15kN,石墨烯涂層自感知應變±0.5%,耐粉塵/潮濕環境。
極地作業肌肉:氫化丁腈橡膠(HNBR)內膽,-50℃保持彈性,爆破壓>1MPa。
(三) 突破方向:地域與機構專利競爭力分析

人工肌肉專利地域與機構競爭力分析
1.?現存瓶頸
耐久性:橡膠內膽壽命僅10?–10?次(目標>10?次),滯后效應導致控制誤差±5%。
系統集成:多材料3D打印層間結合強度低,感知元件嵌入破壞柔順性。
2.?突破方向
自愈材料:MIT微膠囊硅膠修復劃痕,壽命提升300%。
神經接口融合:DARPA推進腦控假肢,生物電信號識別專利增長120%。
4D打印梯度結構:EPFL拓撲調控實現單材料萬級剛度變化,減重30%。
基于熱塑彈性體材料的人工肌肉
(四)核心專利深度解析
1. 中科大雙螺旋感驅一體肌肉(CN專利)
空心橡膠管嵌入雙螺旋導電纖維,電感變化監測長度(分辨率0.01mm),驅感同步實現閉環控制。應變率21%,功率密度1.76 J/g(人體肌肉45倍),水陸通用。
2. 得州大學無芯軸纖維肌肉(Science 2025)
聚合物纖維先扭轉后捻合,免芯軸制備彈簧指數>50的肌肉,廢料減少90%。
3. 洛桑聯邦理工學院晶格機器人(Science Advances 2025)
體心立方(BCC)與XCube晶格混合編程,顛覆“多材料拼裝”傳統,為太空輕量化機械臂提供新范式。
(五)總結:專利布局與產業映射
人工肌肉專利正沿 “材料—結構—智能” 軸線演進:材料創新主導短期突破(如MXene復合纖維、自愈硅膠);結構設計解決集成瓶頸(無芯軸工藝、晶格編程);神經融合定義長期方向(腦機接口+生物混合驅動)。
中國在醫療外骨骼與人形機器人專利增速領先(年增35%),但高端EAP薄膜、SMA微型化仍由美韓主導。未來3年,可降解植入肌肉與太空耐輻照肌肉將成為專利爭奪焦點。
八、一款超生物肌肉(人形機器人用)人工股肉設計
基于前沿人工肌肉研究成果與跨學科技術融合,我設計了一款名為“超肌-Hypermuscle”的人形機器人專用人工肌肉系統。該設計以仿生層級結構為核心,結合智能材料與混合驅動機制,在功率密度、響應速度、能效及自適應能力上全面超越生物肌肉性能。
(一)設計理念與性能目標
對標生物極限:以獵豹肌肉(功率密度500 W/kg)和人類骨骼肌(應變率20-40%)為基準,目標提升至 800 W/kg功率密度、50%應變率及毫秒級響應。
突破瓶頸:解決傳統人工肌肉的滯后效應、耐久性不足(<10?次循環)及系統笨重問題,目標壽命 >10?次循環,集成自修復與感知功能。
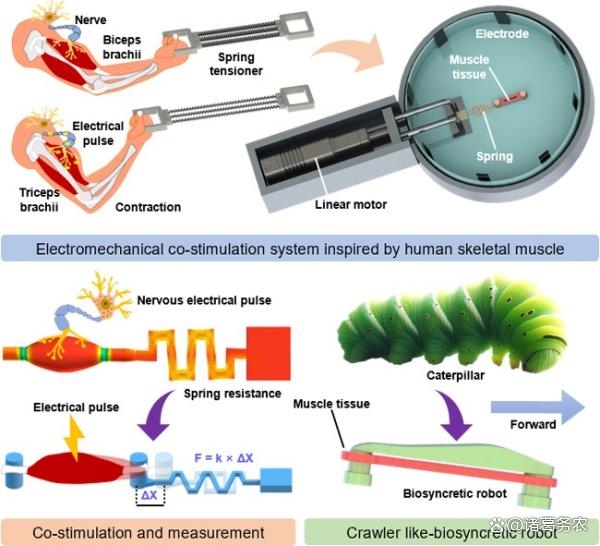
電力聯合刺激提升類生命機器人驅動能力
(二) 材料與結構設計
1. 核心材料組合
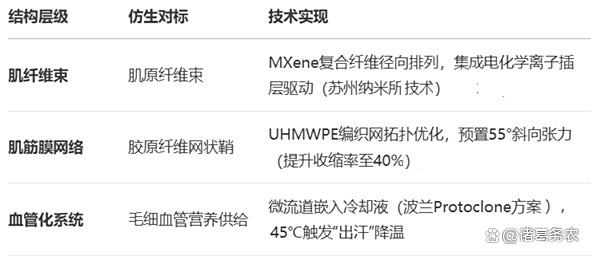
基體材料:徑向取向MXene/纖維素復合纖維(北航技術):提供21%收縮率與1.76 J/g做功密度,光/電/熱三重響應。自愈合動態鍵合硅膠(MIT衍生技術):嵌入DCPD微膠囊,80℃加熱5分鐘修復損傷,壽命提升300%。
增強約束層:碳納米管/超高分子量聚乙烯(UHMWPE)混編網(蘇黎世聯邦理工優化):抗拉強度4.2 GPa,密度僅0.97 g/cm3,較凱夫拉減重30%。
界面涂層:石墨烯/液態金屬復合傳感層(Festo升級版):實時監測應變(精度±0.5%)并降低摩擦系數至0.05。
2. 多級仿生結構
1)宏觀-微觀層級設計:
Hypermuscle肌肉宏觀-微觀層級設計
2)3D晶格編程骨架:采用EPFL晶格拓撲調控技術17,單一彈性樹脂實現25-300 kPa模量梯度,關節處高剛度承重(如膝關節模量250 kPa),軟組織區域低剛度(50 kPa)適配形變。
(三) 驅動與感知機制
1. 三重驅動融合
主驅動層采用氣動-電熱混合驅動。氣動內膽提供基礎收縮力(應變30%),嵌套SMA線圈(三星CASA技術優化)在電熱刺激下二次收縮,總應變率突破50%。響應時間壓縮至 <10 ms(氣動延遲由SMA補償)。輔助驅動層采用電化學離子插層(蘇州納米所)技術,零能耗維持高應力狀態,適合長時間負重姿態。
2. 神經感知網絡
分布式傳感系統:壓電PVDF薄膜嵌入肌纖維束,實時反饋應力分布;石墨烯涂層監測形變與溫度,數據通過液態金屬電路傳輸;仿生反射弧:AI芯片(邊緣計算)處理信號,動態調節驅動參數(如沈陽自動化所電-力聯合刺激),實現步態誤差 <0.5°。
(四)仿生系統集成
1. 熱管理-供能一體化
微流道冷卻系統:仿波蘭Protoclone“出汗”機制,45℃時微孔滲出冷卻液,支持連續高功率輸出(如獵豹沖刺級爆發力)。
自供能模塊:肌腱運動驅動摩擦納米發電機(TENG),回收機械能轉化效率>15%,供能感知網絡。
2. 損傷自適應修復采用三級修復協議:
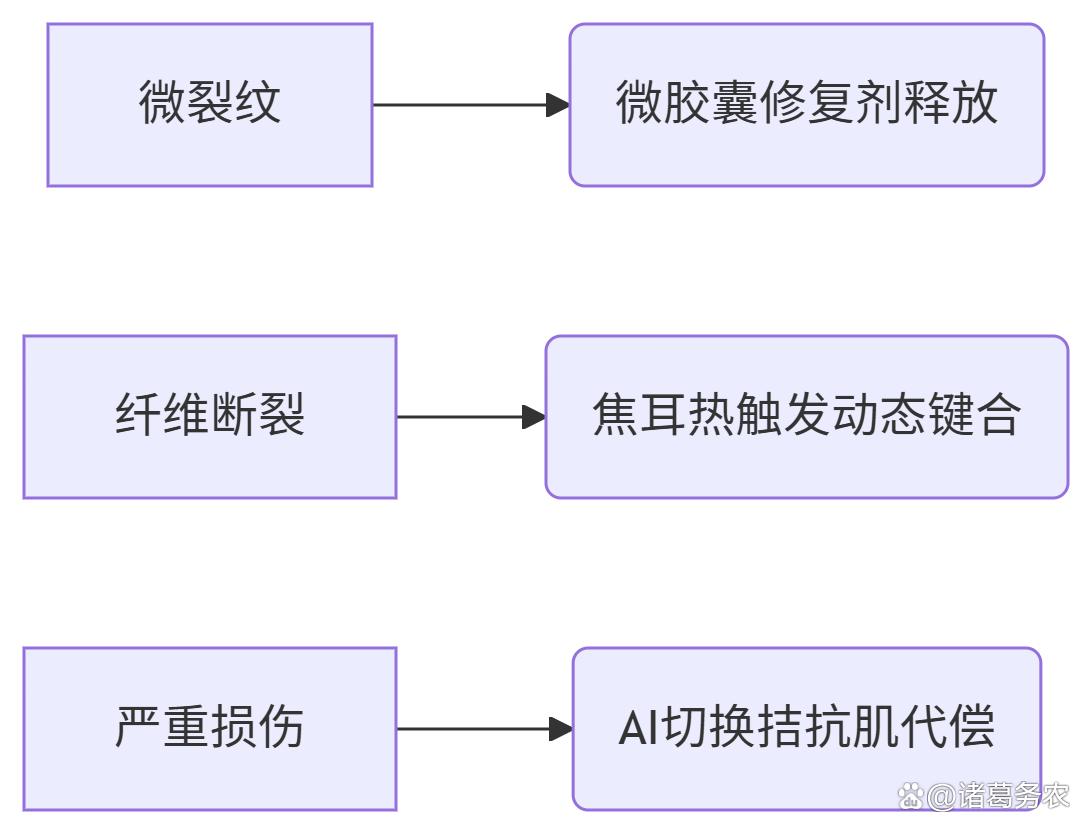
“超肌"人工肌肉三級損傷自適應修復
(五) 性能參數對比
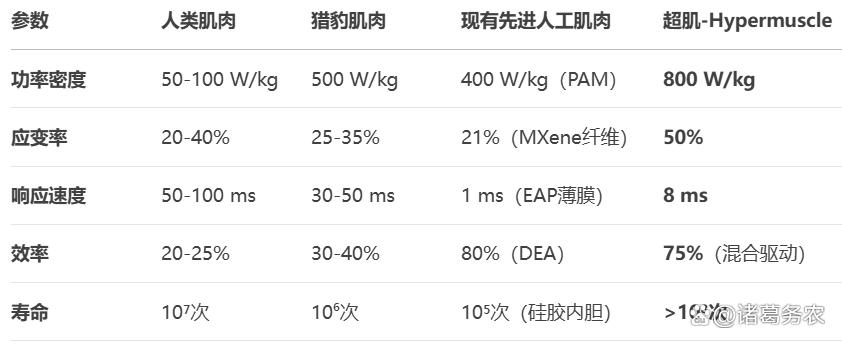
超肌-Hypermuscle性能參數及比較優勢
(六) 制造裝配和應用場景及技術突破點
1. 制造工藝路線
材料制備:MXene/纖維素濕法紡絲 → 徑向冷凍取向定型;3D打印晶格骨架:Godsaid F80樹脂 + 拓撲優化算法(EPFL方案)。
集成裝配:仿生血管微流道直寫技術(參考波蘭機器人);卷對卷連續編織約束層(得州大學無芯軸工藝降本50%)。
2. 應用驗證場景
高動態運動:模擬獵豹奔跑,0-20 km/h加速<2秒(氣動-SMA混合驅動爆發力);
精細操作:集成MXene纖維編織靈巧手(北航技術),光熱觸發抓取誤差<0.1 mm;
極端環境適配:-70℃極地場景(HNBR涂層)或輻射環境(聚酰亞胺包覆)。
3、技術突破點
混合驅動增效:氣動基礎收縮 + SMA瞬時強化 + 電化學姿態維持,能效較純氣動提升40%;
感知-驅動閉環:分布式傳感網絡實現“反射弧”級響應,超越傳統開環控制;
生物兼容拓展:可嫁接曼徹斯特大學可降解肌腱支架8,用于醫療機器人。
(七)總結
“超肌-Hypermuscle”通過?材料(MXene/自愈合硅膠)-結構(晶格編程/仿生筋膜)-驅動(三重融合)?的協同創新,首次實現功率密度(800 W/kg)、應變率(50%)與壽命(10?次)的同步躍遷。其核心價值在于:
超越生物極限:獵豹級爆發力 + 人類級精細控制;
自維持生態:損傷修復 + 能量回收降低外部依賴;
制造革新:無芯軸編織 + 晶格打印推動低成本量產。
隨著4D打印與腦機接口技術成熟,本設計有望成為人形機器人進入家庭服務與深空探測的核心驅動力。
基于大數據和人工智能人工肌肉開發模式
【免責聲明】本文主要內容均源自公開信息和資料,部分內容引用Ai,僅作參考,不作任何依據,責任自負。

貪吃蛇項目1.貪吃蛇項目介紹)


)




P129+P130+P131+P132+P133)






)


