
- 作者:Tengchao Zhang 1 ^{1} 1 , Yonglin Tian 2 ^{2} 2 , Fei Lin 1 ^{1} 1, Jun Huang 1 ^{1} 1, Patrik P. Süli 3 ^{3} 3, Rui Qin 2 , 4 ^{2,4} 2,4, and Fei-Yue Wang 5 , 1 ^{5,1} 5,1
- 單位: 1 ^{1} 1澳門科技大學創新工程學院工程科學系, 2 ^{2} 2中科院自動化研究所多模態人工智能系統國家重點實驗室, 3 ^{3} 3匈牙利óbuda大學, 4 ^{4} 4天津大學復雜管理系統計算與分析實驗室, 5 ^{5} 5中國科學院大學中國經濟社會研究中心
- 論文標題:CoordField: Coordination Field for Agentic UAV Task Allocation In Low-altitude Urban Scenarios
- 論文鏈接:https://arxiv.org/pdf/2505.00091
主要貢獻
- 提出了 CoordField,這是一種基于協調場的無人機群任務分配方法,通過不斷更新的勢場來表示城市環境中任務的緊急程度和無人機的影響,增強了實時響應能力。
- 提出了一種無人機群的代理系統,能夠從自然語言描述中進行高精度的任務理解,并通過具有不同角色的專門協作代理支持動態規劃和部署。
- 在相同任務場景下,將該系統與多個基線模型進行對比評估,驗證了其在城市環境中卓越的協調性能。
研究背景
- 隨著無人機群在城市環境中執行行人檢測、車輛跟蹤和交通信號監控等復雜任務的需求不斷增加,多無人機系統相較于單無人機在覆蓋范圍、系統冗余和運行效率方面具有顯著優勢。
- 然而,任務復雜性的增加和城市環境的高度動態性也帶來了巨大挑戰。有效的任務分配需要系統能夠持續重新分配無人機到新任務,適應無人機故障和任務優先級的變化,并在沒有集中控制的情況下實現去中心化的智能協調。
- 現有的優化算法(如灰狼優化算法和鯨魚優化算法)通常針對特定類型的任務,難以適應在高度動態環境中運行的異構無人機集群。隨著大語言模型(LLM)的發展,其強大的語義理解和工具調用能力為解決此類問題提供了新的思路。
- 然而,現有基于LLM的方法在處理復雜、快速變化環境中的多任務時仍存在顯著局限性。
- 代理人工智能(Agentic AI)作為一種新興的靈活且統一的方法,能夠更好地應對這些挑戰。
基礎知識
智能體系統
- 定義與特點:代理人工智能(Agentic AI)是一種新型智能范式,強調自主感知、目標驅動的規劃和自適應決策。與傳統被動方法不同,Agentic AI注重代理的持續目標追求、上下文記憶、自適應工具使用和自我反思能力。這些能力使代理能夠在動態環境中更自主地協調行動。
- 應用場景:在復雜的城市任務場景中,Agentic AI能夠幫助無人機理解高級指令,有效分配子任務,并在任務變化或代理故障時快速重新配置協調策略,實現真正的自主協作。
- 理論基礎:基于LLM的代理系統在復雜任務分解和順序執行方面表現出強大的推理和規劃能力,為構建自主多無人機系統提供了理論和方法基礎。
大語言模型用于自然語言任務解析
- LLM的優勢:大語言模型(LLM)在自然語言理解和通用推理方面取得了快速進展,能夠處理模糊語義、條件邏輯和空間語言,表現出比傳統基于規則的解析器更強的泛化能力。
- 任務生成框架:研究人員開發了多種框架,如Code-as-Policies和Prompt2Action,使LLM能夠將自然語言指令映射為可執行的任務代碼。這些方法通常結合少樣本提示和約束提示,以提高生成輸出的有效性和安全性。
- GSCE框架:GSCE框架通過提供指南、技能API、約束和示例,指導LLM生成符合物理約束和操作約束的控制程序,展示了提示工程在無人機任務規劃中的實際價值。
基于場的協調與分配
- 場驅動方法:場驅動方法,尤其是人工勢場(APF)方法,已被廣泛應用于移動機器人領域。該方法將目標點建模為吸引源,障礙物建模為排斥源,機器人通過沿著勢場梯度下降來導航,從而實現路徑規劃和實時避障。
- 交通流建模應用:在交通流建模中,場驅動方法用于模擬交通動態的演變,將車輛建模為受交通密度場、速度場等因素影響的粒子,能夠更有效地捕捉宏觀和微觀變化。
- 研究思路:受此啟發,本研究采用類似策略,將任務需求和無人機工作負載建模為連續空間場,通過動態演化的勢場引導無人機運動和分配任務。該方法具有去中心化結構、強實時適應性和高響應性,特別適合任務分布不均勻且動態變化的城市場景。
研究方法
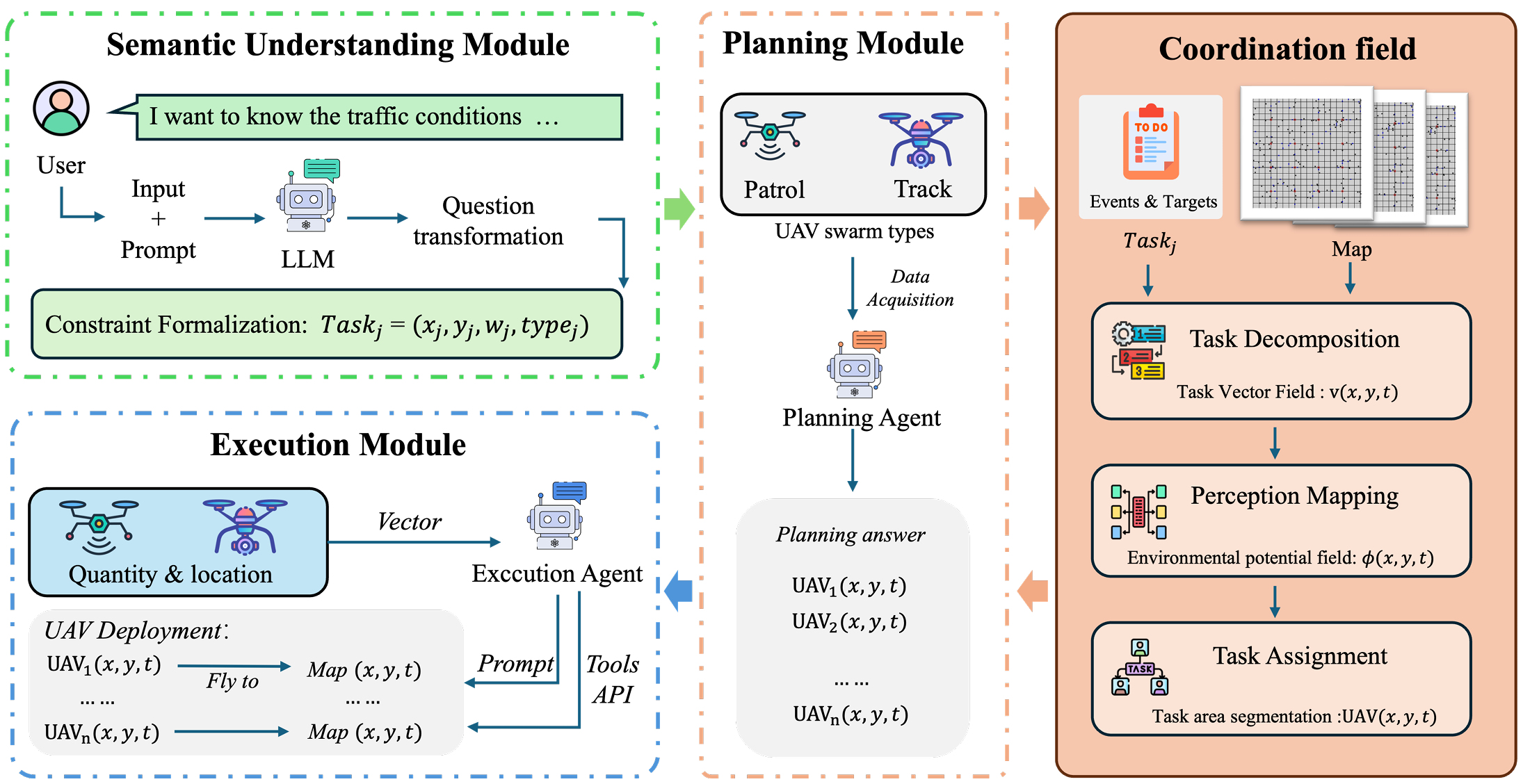
語義理解模塊
- 功能:該模塊負責解釋用戶提供的自然語言輸入,并將其轉換為適合下游規劃和執行的結構化任務表示。它作為人機交互界面,通過語言命令實現與無人機群的直觀交互。
- 任務翻譯過程:LLM將模糊或抽象的自然語言指令映射為形式化的約束,提取關鍵元素(如目標位置、任務類型和優先級),并生成結構化任務元組:
Task j = ( x j , y j , w j , type j ) \text{Task}_j = (x_j, y_j, w_j, \text{type}_j) Taskj?=(xj?,yj?,wj?,typej?)
其中, ( x j , y j ) (x_j, y_j) (xj?,yj?) 表示目標的空間坐標, w j w_j wj? 表示任務權重或優先級, type j \text{type}_j typej? 表示任務的語義類別(如巡邏、跟蹤、檢查)。
規劃模塊和協調場
- 規劃模塊功能:將語義解析得到的任務元組轉換為動態的無人機協調策略。規劃代理將任務元組和無人機狀態數據輸入協調場,協調場通過感知映射、任務分解和任務分配三個子模塊,以閉環方式適應任務需求和空間分布模式的變化。
- 感知映射:
- 構建時間變化的勢場 ? ( x , y , t ) \phi(x, y, t) ?(x,y,t) 來表示高優先級任務區域的空間強度和分布。該標量場由加權高斯函數的和組成:
? ( x , y , t ) = ∑ j = 1 M w j ( t ) ? exp ? ( ? ∥ ( x , y ) ? ( x j ( t ) , y j ( t ) ) ∥ 2 2 σ j 2 ) \phi(x, y, t) = \sum_{j=1}^{M} w_j(t) \cdot \exp\left(-\frac{\|(x, y) - (x_j(t), y_j(t))\|^2}{2\sigma_j^2}\right) ?(x,y,t)=j=1∑M?wj?(t)?exp(?2σj2?∥(x,y)?(xj?(t),yj?(t))∥2?)
其中, σ j \sigma_j σj? 表示任務 j j j 的空間影響半徑。 - 勢場在建筑物等障礙物區域內被顯式設置為零。
- 構建時間變化的勢場 ? ( x , y , t ) \phi(x, y, t) ?(x,y,t) 來表示高優先級任務區域的空間強度和分布。該標量場由加權高斯函數的和組成:
- 任務分解:
- 構建時間變化的矢量場 v ( x , y , t ) v(x, y, t) v(x,y,t),表示無人機群的運動速度場。基于流體力學的納維-斯托克斯方程定義運動方程:
d v d t = ? 1 ρ ? p + ν ? 2 v + F task ( ? ) \frac{dv}{dt} = -\frac{1}{\rho}\nabla p + \nu \nabla^2 v + F_{\text{task}}(\phi) dtdv?=?ρ1??p+ν?2v+Ftask?(?)
其中, v ( x , y , t ) = ( v x , v y ) v(x, y, t) = (v_x, v_y) v(x,y,t)=(vx?,vy?) 表示2D空間中每一點的速度向量, ν \nu ν 表示流體粘度, F task = k ? ? F_{\text{task}} = k \nabla \phi Ftask?=k?? 是用于引導無人機向高勢場值區域移動的外力項。 - 擴散項 ν ? 2 v \nu \nabla^2 v ν?2v 有助于防止無人機過度集中在單個區域,增強空間分布和系統魯棒性。
- 構建時間變化的矢量場 v ( x , y , t ) v(x, y, t) v(x,y,t),表示無人機群的運動速度場。基于流體力學的納維-斯托克斯方程定義運動方程:
- 任務分配:
- 引入局部渦旋機制,為每個無人機生成一個旋轉場,作為動態排斥控制策略。每個無人機 i i i 在當前位置 ( x i , y i ) (x_i, y_i) (xi?,yi?) 生成一個旋轉場:
ω i ( r ) = Γ i 2 π r exp ? ( ? ( r r 0 ) 2 ) \omega_i(r) = \frac{\Gamma_i}{2\pi r} \exp\left(-\left(\frac{r}{r_0}\right)^2\right) ωi?(r)=2πrΓi??exp(?(r0?r?)2)
其中, r r r 是從無人機 i i i 的徑向距離, r 0 r_0 r0? 是場的影響半徑, Γ i \Gamma_i Γi? 是由無人機的能力分數 c i ( t ) c_i(t) ci?(t) 和局部勢場值 ? ( x i , y i , t ) \phi(x_i, y_i, t) ?(xi?,yi?,t) 決定的循環強度:
Γ i ( t ) = c i ( t ) ? ? ( x i ( t ) , y i ( t ) , t ) ∑ j = 1 N c j ( t ) \Gamma_i(t) = \frac{c_i(t) \cdot \phi(x_i(t), y_i(t), t)}{\sum_{j=1}^{N} c_j(t)} Γi?(t)=∑j=1N?cj?(t)ci?(t)??(xi?(t),yi?(t),t)? - 基于該場,系統計算每個無人機的切向速度分量 v θ , i ( r ) v_{\theta,i}(r) vθ,i?(r),形成圍繞每個無人機的排斥速度,模擬代理間的避碰動態:
v θ , i ( r ) = Γ i 2 π r ( 1 ? exp ? ( ? ( r r 0 ) 2 ) ) v_{\theta,i}(r) = \frac{\Gamma_i}{2\pi r} \left(1 - \exp\left(-\left(\frac{r}{r_0}\right)^2\right)\right) vθ,i?(r)=2πrΓi??(1?exp(?(r0?r?)2)) - 最終,每個無人機的控制速度向量通過將全局引導速度場 v ( x , y , t ) v(x, y, t) v(x,y,t) 與所有無人機生成的切向排斥速度疊加得到:
v new ( x , y , t ) = v ( x , y , t ) + ∑ i = 1 n v θ , i ( x , y , t ) v_{\text{new}}(x, y, t) = v(x, y, t) + \sum_{i=1}^{n} v_{\theta,i}(x, y, t) vnew?(x,y,t)=v(x,y,t)+i=1∑n?vθ,i?(x,y,t)
該機制確保無人機不僅被引導到高優先級任務區域,還通過局部渦旋效應相互排斥,從而在完全去中心化的設置中實現動態穩定的任務分配和協調行為。
- 引入局部渦旋機制,為每個無人機生成一個旋轉場,作為動態排斥控制策略。每個無人機 i i i 在當前位置 ( x i , y i ) (x_i, y_i) (xi?,yi?) 生成一個旋轉場:
執行模塊
- 核心任務:將規劃模塊的輸出(包括流場矢量 v new ( x , y , t ) v_{\text{new}}(x, y, t) vnew?(x,y,t) 和無人機任務分配信息)轉換為物理或模擬無人機可執行的實時控制命令。
- 執行過程:
- 執行代理通過標準化API接口(如MAVSDK、ROS2或AirSim)與底層控制系統通信。
- 在任務執行階段,每架無人機根據當前位置 ( x , y , t ) (x, y, t) (x,y,t) 從預計算的控制場 v new ( x , y , t ) v_{\text{new}}(x, y, t) vnew?(x,y,t) 中采樣局部速度向量,并將其用作下一個導航方向。
- 執行代理根據任務類型生成飛行控制命令,并將其發送到無人機平臺。
- 無人機在動態環境中持續報告其狀態(包括位置、速度和執行狀態),用于實時刷新任務勢場 ? ( x , y , t ) \phi(x, y, t) ?(x,y,t) 和流場矢量 v ( x , y , t ) v(x, y, t) v(x,y,t)。
- 當環境發生變化(如出現新任務目標、完成當前任務或引入障礙物)時,系統重新計算相關場,并通過執行代理提供更新的控制指令。
- 閉環機制:感知-規劃-執行循環以高頻率運行,確保系統表現出強大的響應能力和去中心化的動態協調能力。無人機能夠在復雜多變的環境中重新規劃、協同避障和目標適應,實現真正的自適應智能行為。
實驗
環境和無人機配置
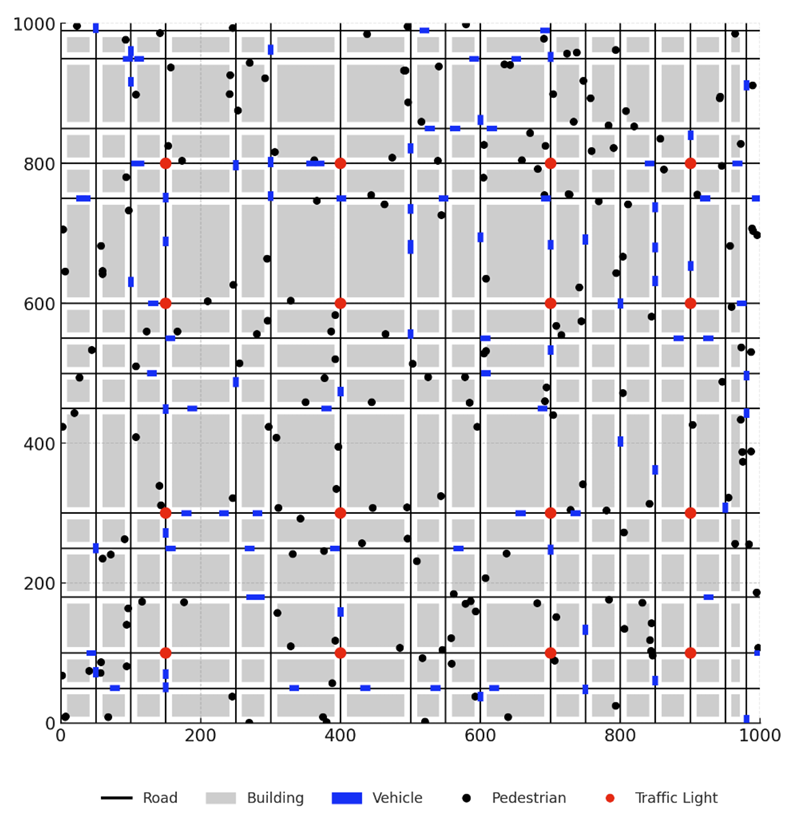
- 模擬環境:實驗在一個定制的二維城市模擬環境中進行,覆蓋1000×1000網格空間,包含城市道路網絡、建筑物、交通信號燈、行人和車輛。
- 無人機配置:共部署20架無人機,分為巡邏無人機和跟蹤無人機兩種類型,每種10架。兩種類型的無人機具有相同的飛行性能,但在感知和識別能力上有所不同。
- 任務指令:任務指令通過自然語言輸入,例如“請檢查人群和車輛”,通過DeepSeek API解析為結構化任務信息。
實驗結果與分析
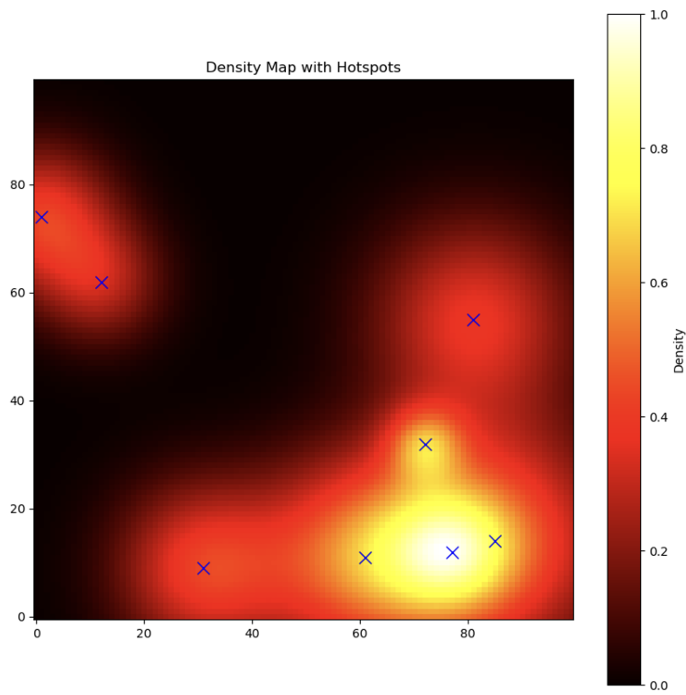
- 任務密度分布:通過熱力圖展示了城市環境中任務密度的分布情況,紅色和黃色區域表示任務熱點區域,系統能夠動態地重新分配無人機資源以應對這些高需求區域。
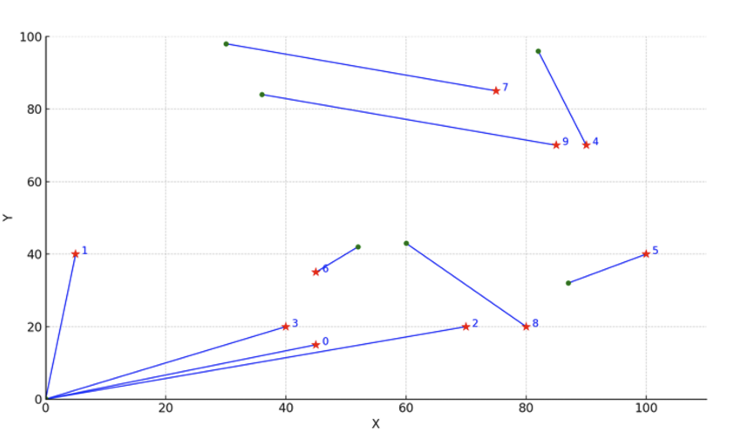
- 無人機軌跡優化:展示了優化后的無人機軌跡,每條藍色軌跡連接起點(綠色三角形)和任務目標(紅色圓圈),表明系統能夠基于最小旅行距離進行全局路徑優化,同時避免擁堵和沖突。
- 性能評估指標:
- 任務解析準確率(TPA):衡量自然語言指令正確解析為結構化任務表示的比例。該系統達到了96%的最高TPA,顯著優于其他基線模型。
- 覆蓋效率(CE):量化無人機有效覆蓋任務定義區域的程度。該系統平均覆蓋效率為95%,在任務突發場景下仍能保持超過80%的有效覆蓋。
- 任務負載平衡(TLB):評估任務負載在所有無人機之間的分布均勻性。該系統展示了最低的任務分配密度梯度范數,僅為0.8,顯著降低了資源聚集,增強了空間協調性。
- 無人機利用率(UUR):表示參與任務執行的無人機比例。該系統達到了97%的最高利用率,表明大多數無人機始終保持活躍狀態。
- 對比結果:如下表所示,該系統在多個關鍵性能指標上均優于Deepseek-v3、GPT-4o、Claude-3-7-Sonnet、LLaMA-4-Scout和Gemini-2.5-Pro等基線模型。
| 模型 | TPA | CE | TLB | UUR |
|---|---|---|---|---|
| Our method | 96% | 95% | 0.8 | 97% |
| Deepseek-v3 | 70% | 78% | 2.1 | 85% |
| GPT-4o | 74% | 85% | 1.5 | 82% |
| Claude-3-7-Sonnet | 76% | 80% | 1.6 | 84% |
| LLaMA-4-Scout | 72% | 79% | 1.9 | 83% |
| Gemini-2.5-Pro | 73% | 81% | 1.7 | 84% |
結論與未來工作
- 結論:
- 該論文提出的協調場代理系統在復雜動態的城市環境中展示了高效率、穩定性和適應性,能夠實時解析自然語言指令并通過協調場引導實現高效的任務分配。實驗結果驗證了其優越性能。
- 未來工作:
- 未來的工作計劃將系統擴展到三維場景和真實世界的無人機群中。













)

)




