一.Mat概念
????????Mat 是整個圖像存儲的核心也是所有圖像處理的最基礎的類,Mat 主要存儲圖像的矩陣類型,包括向量、矩陣、灰度或者彩色圖像等等。Mat由兩部分組成:矩陣頭,矩陣數據。矩陣頭是存儲圖像的長度、寬度、色彩信息等頭部信息;矩陣數據則是存儲具體的圖像數據。(我的理解就是,Mat是把圖像分為一塊一塊矩陣類型保存,矩陣頭顯示這張圖片基本信息,如這張圖片多大,是不是彩色;具體的信息存儲由矩陣數據存儲)。
二.Mat通道
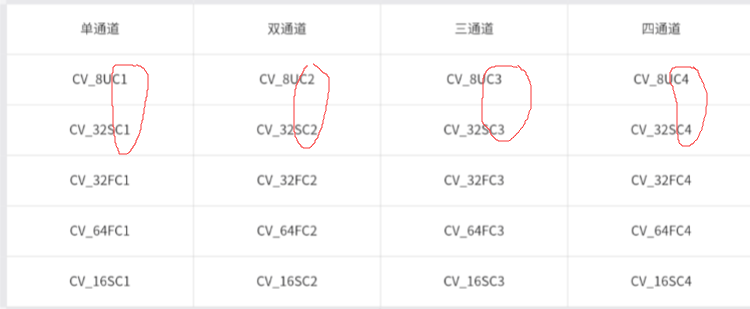
圖中C1,C2,C3,C4代表幾通道 ;前面CV_8U,8S,16U,16S,32U,32S代表用什么類型存儲,例如:CV_8U就是用8位無符號類型存儲,CV_8S就是用8位有符號存儲。
- ?單通道(灰度圖),就是圖片是灰色的

- ?雙通道(二值圖像),就是黑白照片
- ?三通道(RGB 彩色圖像)

- ?四通道(帶 Alpha 的四通道圖像),就是ARGB圖像,更好看一點。

?三.Mat創建和構造方法
- Mat(int rows, int cols, int type);
?重載的構造函數,這個構造函數在創建的時候,提供矩陣的大小,分別是 rows、cols 以及存儲類型 type
rows:行數,也指的是圖像的高度,height。
cols:列數,也指的是圖像的寬度,width。
type:通道類型,具體的看上面的圖
示例:Mat t1 = Mat(300,300,CV_8UC1),這指的是創建一個 width:300,height:300,單通道的灰度圖像.
- ?Mat(Size size, int type);
?重載的構造函數,這個構造函數在創建的時候,需要傳入 Size 類和類型。
第一個傳參:Size 結構體,Size(width,height)
第二個傳參:type 通道類型,具體的看上面的圖
示例:Mat t2 = Mat(Size(300,300),CV_8SC3),這指的是創建一個 width:300,height:300,三通道的灰度圖像
- ?Mat(int rows, int cols, int type, const Scalar& s);
?重載的構造函數,這個構造函數在創建的時候,提供矩陣的大小,分別是 rows、cols、存儲類型 type、還有 Scalar 顏色標量。
第一個傳參:rows 行數,也指的是圖像的高度,height。
第二個傳參:cols 列數,也指的是圖像的寬度,width。
第三個傳參:type 通道類型,具體的看上面的圖
第四個傳參:Scalar 顏色標量,Scalar(v0,v1,v2,v3),v0,v1,v2,v3 分別對應 OPENCV 顏色分量的四個值
示例: Mat mat = Mat(300,300,CV_8UC3,Scalar(255,255,255));表示的是創建cols:300,rows:300,三通道的灰度,顏色標量為白色的圖像
- Mat::zeros(rows,cols,type);?
?重載的構造函數,這個構造函數在創建的時候,提供矩陣的大小,分別是 rows、cols 以及存儲類型 type。ZEROS 相當于創建一張黑色的圖片,每個像素通道為 0,并且 Scalar(0,0,0)。
第一個傳參:rows 行數,也指的是圖像的高度,height。
第二個傳參:cols 列數,也指的是圖像的寬度,width。
第三個傳參:type 通道類型,具體的看上面的圖
示例: Mat::zeros(300,300,CV_8SC3);,這指的是創建一個 width:300,height:300,三通道的彩色圖像,Scalar(0,0,0),相當于Mat mat = Mat(300,300,CV_8SC3,Scalar(0,0,0));
- ?Mat::ones(rows,cols,type);
?重載的構造函數,這個構造函數在創建的時候,提供矩陣的大小,分別是 rows、cols 以及存儲類型 type。ONES 相當于每個像素第一個通道為 1,后面兩個通道為 0。
第一個傳參:rows 行數,也指的是圖像的高度,height。
第二個傳參:cols 列數,也指的是圖像的寬度,width。
第三個傳參:type 通道類型,具體的看上面的圖
示例: Mat::ones(300,300,CV_8SC3),這指的是創建一個 width:300,height:300, 三通道的彩色圖像,Scalar(1,0,0),這等同于 Mat mat = Mat(300,300,CV_8SC3,Scalar(1,0,0));
四.?imread讀取圖片信息和imwrite寫入數據
- imread:讀取圖片信息。
?Mat imread( const String& filename, int flags = IMREAD_COLOR );
第一個參數:filename 圖片的名稱,名稱可以是絕對路徑也可以是相對路徑
第二個參數:flags 標識符,flags 標識符默認為 IMREAD_COLOR。flags 一般分為三種:
IMREAD_UNCHANGED(<0)按原樣加載圖像(包括 alpha 通道(如果存在)
IMREAD_GRAYSCALE(0)將圖像作為強度加載(灰白照片)
IMREAD_COLOR(> 0)以 RGB 格式加載圖像(彩色照片)
返回值:Mat 矩陣
- 例如:讀取彩色三通道圖片

Mat img_mat = imread("frame1.jpg");
printf("width = %d, height = %d, channels = %d\n", img_mat.cols, img_mat.rows, img_mat.channels());
...........................................................................................
輸出結果:width = 1920, height = 1080, channels = 3
- 例如:讀取灰白單通道圖片
Mat img_mat_gray = imread("gray_frame1.jpg", IMREAD_GRAYSCALE);
printf("img_mat_gray_width = %d, img_mat_gray_height = %d, img_mat_gray_channels = %d\n", img_mat_gray.cols,img_mat_gray.rows, img_mat_gray.channels());
.................................................................................................................
輸出的結果:img_mat_gray_width = 1920, img_mat_gray_height = 1080, img_mat_gray_channels = 1?
2.?imwrite:保存圖片
?imwrite(const String& filename, InputArray image, const std::vector<int>& params);
第一個傳參:filename 表示要保存的文件名
第二個傳參:image 表示需要保存的圖像數據
第三個傳參:params 保存圖像可選參數,主要是設置圖像的質量,設置規則具體的我們來看看,該參數需要按照參數 id+參數值成對出現,可以出現多對參數值(比如 (paramId_1, paramValue_1, paramId_2, paramValue_2, ...)),但必須保證這些參數對是相關的,比如保存 JPG 圖像時,只能使用和 JPEG 相關的參數 ID 進行組合使用。這里的 ID 基本上是 cv::ImwriteFlags。
- 例如:使用默認的方式 imwrite 保存圖片
Mat mat = Mat(300,300,CV_8UC3,Scalar(218,112,214));
imwrite("mat_demo.jpg", mat);
。。。。。。。。。。。。。。。。。。
上面是使用默認的方法保存圖片,這種方法的所有參數都是默認選項。出來圖片就是:

- ?使用 params 的方式 imwrite 保存圖片
Mat quality_frame1_mat = imread("frame1.jpg");
std::vector<int> params = {cv::IMWRITE_JPEG_QUALITY, 40};
imwrite("quality_mat_demo.jpg", quality_frame1_mat , params);
。。。。。。。。。。。。。。。。。。。。。。。。。
這種方法使用的是 params 參數的方式去設置,上面我們設置了圖像的質量在 40,大家如果想設置其他功能可以參考上面的枚舉進行設置。經過編碼質量 40 的處理后的圖像大小小于原圖像大小,這說明編碼質量關乎著文件的大小和畫面的質量。
五.代碼具體
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>using namespace cv; //Must Need Write cv
using namespace std;int main()
{//構造參數Mat t0 = Mat(300,300,CV_8UC1); //Create a 300x300 single channel matrixMat t1 = Mat(Size(200,200),CV_8UC1); //Create a 300x300 single channel matrixMat t2 = Mat(100,100,CV_8UC1,Scalar(255,255,255)); //Create a 300x300 single channel matrixMat t3 = Mat::zeros(300,300,CV_8UC1); //Create a 300x300 single channel matrixMat t4 = Mat::ones(200,200,CV_8UC1); //Create a 300x300 single channel matrixstd::vector<int> params = {cv::IMWRITE_JPEG_QUALITY, 40};//imwrite寫入數據imwrite("t0.jpg",t0);imwrite("t1.jpg",t1);imwrite("t2.jpg",t2);imwrite("t3.jpg",t3,params);imwrite("t4.jpg",t4);//imread讀取數據Mat a0 = imread("t0.jpg");Mat a1 = imread("t3.jpg");Mat a2 = imread("t4.jpg",IMREAD_GRAYSCALE);printf("a0 heigh:%d weigh: %d channel:%d\n",a0.rows,a0.cols,a0.channels());printf("a3 heigh:%d weigh: %d channel:%d\n",a2.rows,a2.cols,a2.channels());return 0;
}六.AT函數
1.作用? ? ? ? ?
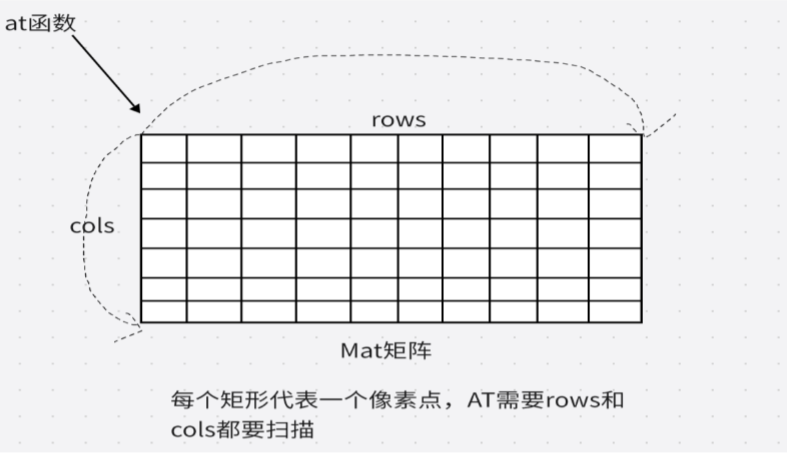
????????AT函數:就是用于修改Mat矩陣的像素值(上面用Mat創建的圖片,這個圖片都是一格一格像素點形成的,我們要想修改圖片顏色,就要用到AT函數對像素點值修改就行)。AT 函數的修改一般需要循環 cols 和 rows 然后對每個像素點進行修改。
2. 定義
????????at<typename>(int i, int j)
第一個參數:typename 指的是 OPENCV 的向量類型,(總結:1,2,3,4就是幾通道,也可以理解為幾維圖像;后面b,s,w,i之類就是用什么類型讀取,整型,還是字符讀取),向量類型如下:
typedef Vec<uchar, 2> Vec2b:uchar 類型的數組,長度為 2, 它表示的是二維圖像的位置信息、尺寸等等
typedef Vec<uchar, 3> Vec3b:uchar 類型的數組,長度為 3,它常用于彩色圖像的像素值以及對 rgb 三個通道的處理,并且通道的像素值都是 uchar 類型
typedef Vec<uchar, 4> Vec4b:uchar 類型的數組,長度為 4,它常用于彩色圖像的像素值以及對 argb 四個通道的處理,并且通道的像素值都是 uchar 類型
typedef Vec<short, 2> Vec2s:short 類型的數組,長度為 2, 它表示的是二維圖像的位置信息、尺寸等等,但不能做像素處理
typedef Vec<short, 3> Vec3s:short 類型的數組,長度為 3, 它常用于彩色圖像的像素值以及對 rgb 三個通道的處理,并且通道的像素值都是 short 類型
typedef Vec<short, 4> Vec4s:short 類型的數組,長度為 4, 它常用于彩色圖像的像素值以及對 argb 四個通道的處理,并且通道的像素值都是 short 類型
typedef Vec<ushort, 2> Vec2w:ushort 類型的數組,長度為 2,它表示的是二維圖像的位置信息、尺寸等等,但不能做像素處理
typedef Vec<ushort, 3> Vec3w:ushort 類型的數組,長度為 3,它常用于彩色圖像的像素值以及對 rgb 三個通道的處理,并且通道的像素值都是 ushort 類型
typedef Vec<ushort, 4> Vec4w:ushort 類型的數組,長度為 4,它常用于彩色圖像的像素值以及對 argb 四個通道的處理,并且通道的像素值都是 ushort 類型
typedef Vec<int, 2> Vec2i: int 類型的數組,長度為 2, 它表示的是一個包含 2 個整數的元素向量,并不能直接表示通道數
typedef Vec<int, 4> Vec4i: int 類型的數組,長度為 4, 它常用于彩色圖像的像素值以及對 argb 四個通道的處理,并且通道的像素值都是 int 類型
typedef Vec<int, 6> Vec6i: int 類型的數組,長度為 6, 它常用于表示六維圖像,包括:坐標、描述子、顏色直方等等,但是不能對六維圖像直接進行處理
typedef Vec<int, 8> Vec8i: int 類型的數組,長度為 8, 它常用于表示八維圖像,包括:坐標、描述子、顏色直方等等,但是不能對八維圖像直接進行處理
typedef Vec<float, 2> Vec2f:float 類型的數組,長度為 2,它表示的是二維圖像的位置信息,但不能做通道處理
typedef Vec<float, 3> Vec3f:float 類型的數組,長度為 3,它常用于彩色圖像的像素值以及對 rgb 三個通道的處理,并且通道的像素值都是浮點數
typedef Vec<float, 4> Vec4f:float 類型的數組,長度為 4,它常用于彩色圖像的像素值以及對 argb 四個通道的處理,并且通道的像素值都是浮點數
typedef Vec<float, 6> Vec6f: float 類型的數組,長度為 4,他用于處理 6 個維度的圖像數據,需要注意的是 Vec6f 僅僅能表示具有 6 個維度的數據,并不可以對數據進行操作.
typedef Vec<double, 2> Vec2d:double 類型的數組,長度為 2,在圖像處理中 Vec2d 僅僅只是表示具有 double 類型的圖像數據,但是并不能直接操作數據像素
typedef Vec<double, 3> Vec3d:double 類型的數組,長度為 3,它常用于表示圖像的彩色三通道,分別是 R(紅色)、G(綠色)、B(藍色),并且對于這三個通道的像素值進行 double 類型數據的處理
typedef Vec<double, 4> Vec4d:double 類型的數組,長度為 4,它常用于表示圖像的彩色四通道,分別是 A(透明度)、R(紅色)、G(綠色)、B(藍色),并且對于這四個通道的像素值進行 double 類型數據的處理。
需要注意的是:一般 OPENCV 對像素的處理大部分都是用 uchar 類型,其他類型用的很少。?
第二個參數:i,指的是 rows,圖像的行數據
第三個參數:j,指的是 cols,圖像的列數據
3.代碼示例
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>using namespace std;
using namespace cv;int main()
{//修改三通道圖片像素點值Mat img_mat = imread("frame1.jpg");//讀取圖片//用at函數遍歷整個圖片三通道像素點并修改像素點值for (int i = 0; i < img_mat.rows; i++){for (int j = 0; j < img_mat.cols; j++){img_mat.at<Vec3b>(i, j)[0] = img_mat.at<Vec3b>(i, j)[0] - 10;img_mat.at<Vec3b>(i, j)[1] -= 50;img_mat.at<Vec3b>(i, j)[2] -= 10;} }//保存修改后的圖片imwrite("frame2.jpg", img_mat);//修改單通道圖片像素點值Mat grayImage;Mat before_Image;cvtColor(img_mat, before_Image, COLOR_RGB2GRAY);cvtColor(img_mat, grayImage, COLOR_RGB2GRAY);//用at函數遍歷整個圖片單通道像素點并修改像素點值for (int i = 0; i < grayImage.rows; i++){for (int j = 0; j < grayImage.cols; j++){grayImage.at<uchar>(i, j) = 50 - grayImage.at<uchar>(i, j);}}//保存修改后的圖片imwrite("frame3.jpg", before_Image);imwrite("frame4.jpg", grayImage);return 0;
}-Qwen2.5-VL-7B LORA微調OCR數據集)















)


詳細步驟)