2025-05-02,由加拿大拉瓦爾大學北方機器人實驗室和多倫多大學機器人研究所聯合創建的 FoMo 數據集,目的是研究機器人在季節性積雪變化環境中的導航能力。該數據集的意義在于填補了機器人在極端季節變化(如積雪深度變化)下的導航研究空白,為開發更可靠的機器人導航系統提供了寶貴的數據支持。
一、研究背景
Teach and Repeat(T&R)是一種依靠人類專家駕駛初始路徑,隨后機器人自主重復該軌跡的導航框架。它在多種平臺上取得了成功,但在季節性變化顯著的環境中(如積雪覆蓋的森林),其性能仍面臨挑戰。
目前遇到的困難和挑戰:
1、環境變化的適應性:季節性積雪覆蓋導致地形和傳感器讀數發生顯著變化,機器人難以在不同季節重復相同的軌跡。
2、傳感器性能的局限性:雷達和激光雷達等傳感器在積雪深度變化時的定位能力受到限制,尤其是在地形起伏較大或積雪高度變化時。
3、控制和動力問題:機器人在積雪覆蓋的地形中行駛時,動力消耗增加,且難以執行復雜的動作(如原地轉彎)。
數據集地址:FoMo數據集|機器人導航數據集|季節性變化數據集
二、讓我們一起來看一下FoMo 數據集
FoMo 數據集是一個專注于機器人在季節性積雪變化環境中的導航數據集,記錄了不同季節(無雪、淺雪、深雪)下的傳感器數據和軌跡信息。
FoMo 數據集記錄了機器人在加拿大魁北克蒙特莫倫西森林中的行駛軌跡,包括激光雷達(Lidar)、雷達(FMCW Radar)、IMU 和輪速編碼器等多種傳感器數據。數據采集時間為冬季,覆蓋了從無積雪到超過 1 米深積雪的季節變化。
數據集構建:
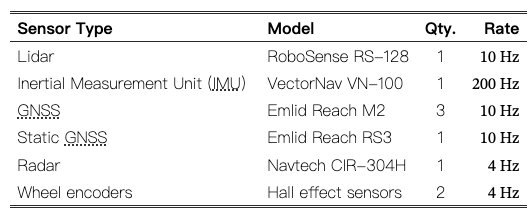
數據集通過 Clearpath Robotics Warthog 無人地面車輛(UGV)采集,車輛配備了 RoboSense RS-128 激光雷達、Navtech CIR-304 雷達、VectorNav VN-100 IMU 和多個 Emlid M2 GNSS 接收器。數據采集時間跨越了 11 月到次年 3 月,記錄了不同季節的環境變化。
數據集特點:
1、多季節覆蓋:數據集包含了從無積雪到深雪覆蓋的多種季節場景。
2、多傳感器融合:同時記錄了激光雷達、雷達和 IMU 等多種傳感器數據。
3、高動態環境:機器人在積雪覆蓋的森林中行駛,地形起伏大,車輛姿態變化顯著。
數據集使用方法
研究人員可以利用該數據集測試機器人在季節性變化環境中的導航算法,評估雷達和激光雷達在積雪覆蓋地形下的定位能力,以及開發針對復雜地形的動力和控制策略。
基準測試總結
在 FoMo 數據集的初步測試中,雷達 Teach and Repeat(RT&R)在積雪深度變化較小的情況下表現良好,但在積雪深度超過 1 米時,定位成功率僅為 60%;激光雷達 Teach and Repeat(LT&R)在去除地面點后表現更優,但對高積雪障礙物的適應性仍有待提高。
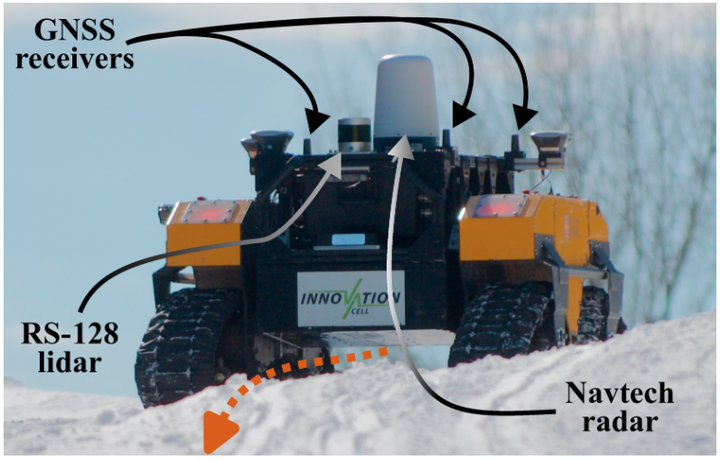
我們的數據采集平臺位于魁北克省的 Montmorency 森林,實驗在此進行。我們使用來自激光雷達和雷達傳感器的狀態估計來測試 Teach and Repeat 框架。
傳感器規格
在 Montmorency 森林實驗站 11 月至 3 月期間的平均每日溫度和累積積雪。11 月的初始教學錄制沒有積雪覆蓋,到 3 月實驗時,積雪深度已達到 1 m 。平均溫度,用虛線表示,在此期間為 ?11.46 °C 。

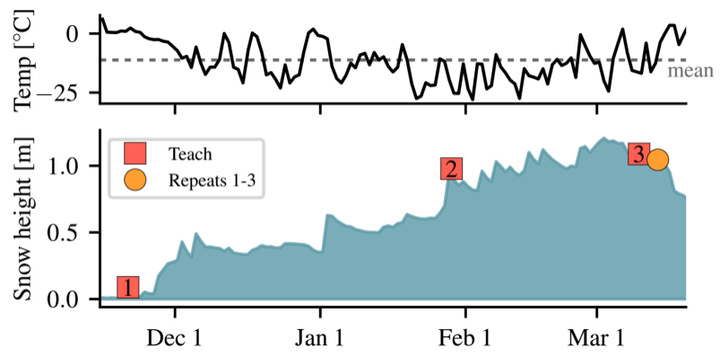
報告的自主率是根據軌跡重復持續時間計算的,而路徑長度來自 GNSS 數據。
在 1 月份記錄并在 3 月份重復的藍色軌跡上的路徑跟蹤誤差。軌跡的藍色部分對應于機器人手動控制的數據點。照片插圖顯示了軌跡上的難點。在門口,機器人從鏟雪路過渡到森林小徑,穿過狹窄的門口,爬上雪堆。在轉彎處,機器人大約在 90 ° 的雪中轉彎。
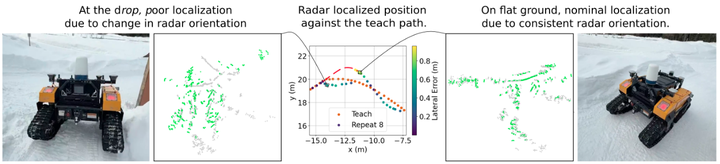
當戰象無人地面車通過下坡(左側)和鏟雪道路(右側)時,雷達定位的比較。每個位置的實時雷達掃描以綠色顯示,與灰色的局部子圖相比。實時掃描和地圖在下坡處錯位,但在平坦地面上對齊良好。中間面板顯示,定位估計在道路右側是錯誤的,導致機器人偏離道路(以虛線紅色顯示)。
三、FoMo數據集應用場景
案例:機器人在深雪覆蓋的陡坡上保持穩定的控制策略優化
假設我們有一個機器人小k,它需要在深雪覆蓋的陡坡上行駛。這種場景特別復雜,因為積雪會讓地面變得滑,而且陡坡會讓機器人的重心不穩,很容易翻車。FoMo數據集里正好有這種場景的數據,我們可以用它來優化機器人的控制策略。
1. 分析數據集
FoMo數據集記錄了機器人在不同季節(包括深雪覆蓋的冬季)的行駛數據。我們先把這些數據拿出來,看看機器人在陡坡上的表現。發現幾個問題:一是機器人在上坡時,車頭容易抬得太高,導致前輪抓地力不足;二是下坡時,車尾容易翹起,容易失控。
2. 設計控制策略
我們決定用一種叫“自適應控制”的方法。這種控制策略很聰明,它可以根據不同的環境自動調整機器人的行為。具體來說,我們給機器人設計了兩個控制策略:
上坡策略:當機器人檢測到前方是陡坡時,它會自動降低速度,同時調整車身姿態,讓車頭稍微低一點,增加前輪的抓地力。
下坡策略:下坡時,機器人會自動調整重心,讓車尾更穩,同時控制剎車力度,防止速度過快。
3. 模擬測試
在正式讓機器人去爬坡之前,我們先用計算機模擬測試一下。我們把FoMo數據集里的地形數據輸入到模擬環境中,讓機器人在虛擬的陡坡上行駛。測試結果還不錯,機器人在上坡和下坡時都能保持穩定,沒有出現翻車的情況。
4. 實地測試
模擬測試通過后,我們把機器人帶到真實的深雪陡坡上進行測試。測試過程中,機器人表現得很棒。上坡時,它按照我們設計的策略,速度控制得很好,車頭也沒有抬得過高;下坡時,車尾也很穩,沒有出現失控的情況。通過FoMo數據集的幫助,我們成功優化了機器人在深雪陡坡上的控制策略。
通過這個案例,我們可以看到FoMo數據集在幫助機器人優化控制策略方面的作用。它不僅提供了豐富的場景數據,還讓我們能夠在虛擬環境中先進行測試,減少了實地測試的風險。
更多開源的數據集,請打開:遇見數據集
遇見數據集-讓每個數據集都被發現,讓每一次遇見都有價值。遇見數據集,領先的千萬級數據集搜索引擎,實時追蹤全球數據集,助力把握數據要素市場。![]() https://www.selectdataset.com/
https://www.selectdataset.com/


)


)













