用單臺Livox Horizon (含內置IMU) 實現高魯棒性的激光-慣性里程計,可在各類極端場景下魯棒運行,并達到高精度的定位和建圖效果。(城區擁堵、高速公路、幽暗隧道)
注:該系統主要面向大型室外環境中的汽車平臺設計。用戶可以使用 Livox Horizon 或 HAP LiDAR 輕松運行該系統。在室內環境中系統同樣表現穩定,我們目前也支持面向機器人設計的 Mid-360 雷達。
1.系統框架
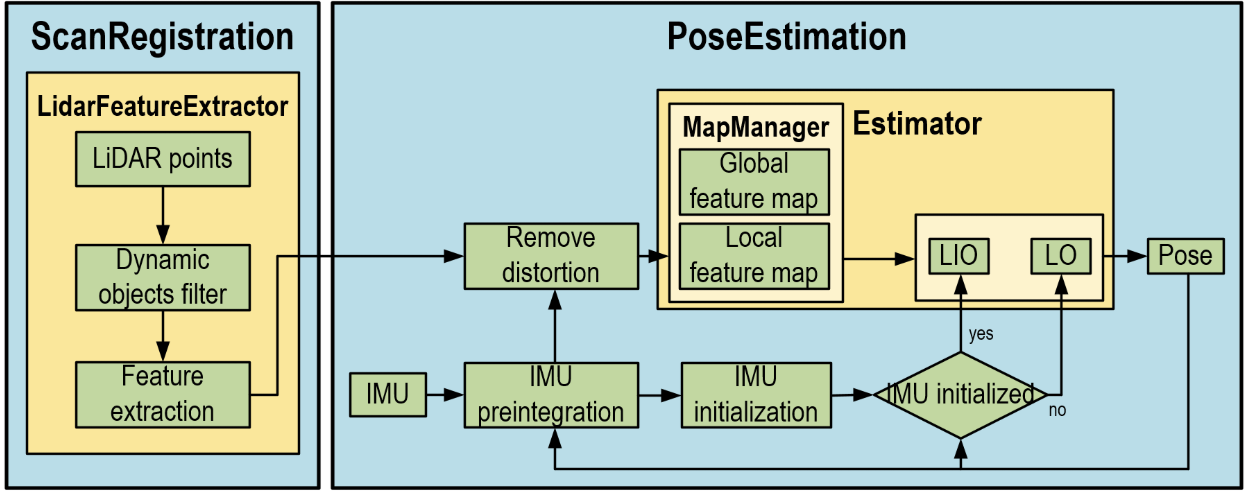
該系統由兩個 ROS 節點組成:ScanRegistration 和 PoseEstimation。
ScanRegistration 節點中的類 “LidarFeatureExtractor” 從原始點云中提取角點特征、平面特征和不規則特征。
PoseEstimation 節點中,主線程用于估計傳感器位姿,而類 “Estimator” 中的另一個線程則利用 “MapManager” 類構建和管理特征地圖。
2.?配置文件
在啟動文件中包含以下參數:
IMU_Mode:用于選擇 IMU 信息融合策略,有三種模式可選:
-
0:不使用 IMU 信息,純激光里程計,使用勻速模型進行運動畸變補償;
-
1:使用 IMU 預積分進行運動畸變補償;
-
2:將 IMU 與激光信息進行緊耦合融合。
Extrinsic_Tlb:激光雷達與 IMU 之間的外參,使用 SE3 形式表示。如果使用的是外部 IMU,則需要自行完成傳感器標定,并將該參數設置為您系統中的外參值。
Used_Line:HAP和Horizon等效為6線,MID360等效為4線。
Use_seg:選擇動態物體濾除的分割方式,有兩種模式可選:
-
0:不使用分割方法,如果數據中幾乎沒有動態物體,可以選擇該模式;
-
1:使用分割方法來剔除動態物體。
3. ScanRegistration
系統從節點 “ScanRegistration” 開始運行,該節點負責提取特征點。在特征提取之前,會先從原始點云中剔除動態物體,因為在城市場景中通常存在大量動態物體,這些動態物體會影響系統的魯棒性和精度。為了過濾動態物體,采用了一種快速的點云分割方法。首先應用歐幾里得聚類將點云劃分為多個聚類,然后將原始點云分為地面點、背景點和前景點。前景點被視為動態物體,從特征提取過程中排除。通過動態物體濾除模塊,系統在動態場景中獲得了較高的魯棒性。
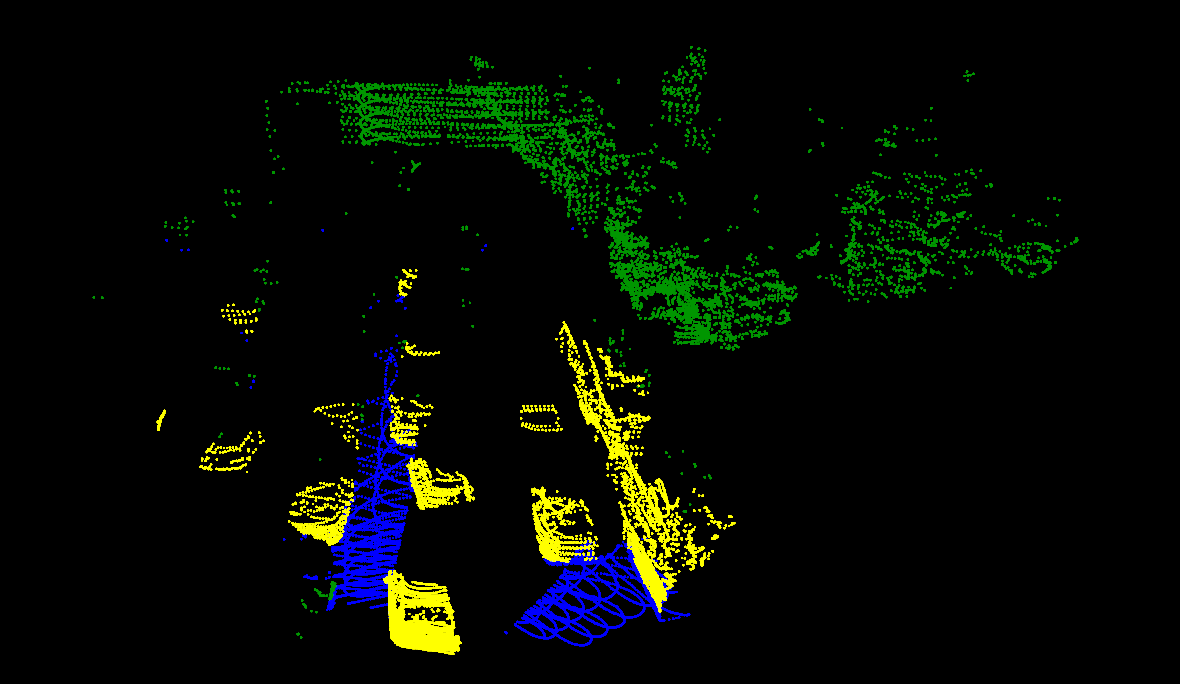
使用歐式聚類方法將原始點云聚類為地面點(藍色),背景點(綠色),和前景點(黃色),如下圖所示。其中前景點(黃色)被視為動態物體,并在特征提取過程中去除。去除之后,系統在動態場景中可保持很高的魯棒性,即便激光雷達的大部分視場角被動態物體遮擋,也可以準確地定位和建圖。
注:具體實現在函數AbvGndSeg()的標記背景點SegBG()和SegObjects()中,這部分代碼沒有使用PCL提供的相關聚類方法(在DoSeg()函數最開始的降采樣也是自己實現的,這部分內容以后可以借鑒)。還有一個是每個點地面在KD樹找到相鄰點后,對鄰近點進行PCA分析,計算這些點的特征值和特征向量,求平均得到地面的法向量 CalGndPos_cor()。
在開闊場景中,通常只能提取較少的特征點,容易導致某些自由度上的退化。為了解決這個問題,設計了一套特征提取流程,使得特征點在空間中分布更廣泛且更加均勻。分布廣泛且均勻的特征點可以在六個自由度上提供更多約束,有助于消除退化問題。此外,在特征稀疏的場景中,一些不規則點也能提供有用的信息,因此將不規則點也作為一個類別提取,用于點云配準。
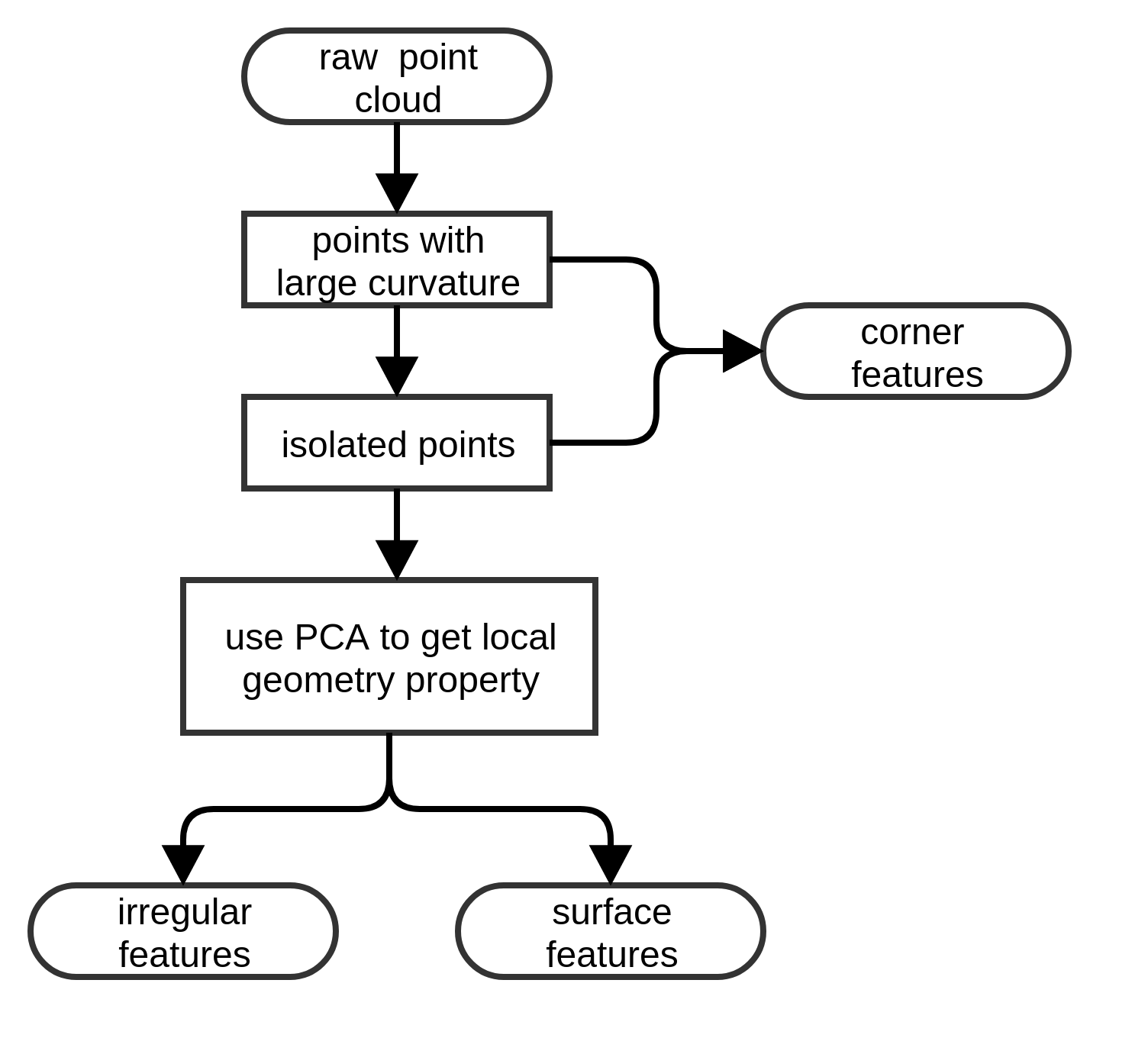
根據局部幾何屬性,特征點被分為三類:角點特征、平面特征和不規則特征。我們首先在每條掃描線上提取曲率較大且孤立的點作為角點特征,然后使用主成分分析(PCA)對其余點進行分類,劃分為平面特征和不規則特征,如下圖所示。針對不同距離的點,設置不同的閾值,以盡可能保證特征點在空間中的分布均勻。
4.?PoseEstimation
在 “PoseEstimation” 節點中,系統首先通過 IMU 預積分或勻速模型對點云的運動畸變進行補償。隨后進入 IMU 初始化模塊。如果初始化成功,系統將切換至 LIO(激光慣性里程計)模式;否則,將以 LO(激光里程計)模式運行,并進行 IMU 狀態初始化。
在 LO 模式下,系統采用幀到模型(frame-to-model)的點云配準方法來估計傳感器位姿。受 ORB-SLAM3 啟發,系統引入了一種最大后驗(MAP)估計方法,用于聯合初始化 IMU 的偏置、速度和重力方向。該方法不依賴繁瑣的初始化流程,支持任意運動軌跡下的初始化,同時考慮了傳感器的不確定性,從而在最大后驗概率意義下獲得最優解,具備高效、魯棒和高精度的特點。
完成初始化后,系統將運行一個基于滑動窗口的緊耦合傳感器融合模塊,估計滑動窗口內的 IMU 位姿、偏置和速度。同時,另一個線程并行地構建和維護全局地圖。
參考:覽沃 LIO-Livox 算法開源 一個魯棒的激光-慣性里程計
)


)














)
