教程
畸變和校正
單目和雙目標定
單雙,rgb-d原理
單目相機
只有一個攝像頭的相機。
原理
小孔成像。
缺點
單目相機無法測量物體點的深度信。
因為物體的Z軸坐標系無法測量。
雙目相機
有兩個攝像頭的相機。
用兩個單目相機組成的雙目相機就可以測量深度信息,有些地方也把雙目相機叫深度相機。
RGB-D相機
RGB-D相機一般有3個鏡頭:中間的鏡頭是普通的攝像頭,采集彩色圖像;另外兩個鏡頭分別用來發射紅外光和接收紅外光。
RGB-D相機也利用和激光一樣得到方法測距:
三角測距和TOF。

相機內參
相機內參通常用一個3×3的矩陣?K表示:


2,主點:定義了相機光軸(Optical Axis)與成像平面(Image Plane)的交點在圖像像素坐標系中的位置。
3,傾斜系數(Skew Coefficient)
-
s:描述圖像坐標系中x軸和y軸的不垂直程度(現代相機通常為0)。
-- 相機內參就是求解焦距和主點。
焦距
鏈接
鏈接
決定了相機的視角范圍和成像大小。
-
凸透鏡:焦距為正,光線匯聚。
-
凹透鏡:焦距為負,光線發散。
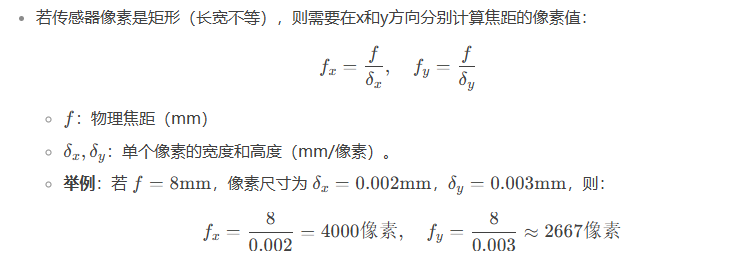
焦距的含義和作用:
物理焦距:
鏡頭的光學中心到感光元件之間的距離,用f表示。
像素焦距:
相機內參矩陣中的?fx??和?fy??是將物理焦距轉換到像素坐標系的產物,可能不同。
![]()
主點
理想相機模型:
傳感器完全對準鏡頭,也就是像素坐標系原點完全對準相機坐標系(鏡頭中心坐標系)。
真實相機:
由于制造誤差(如傳感器安裝偏移、鏡頭與傳感器未嚴格對齊),光軸可能不會精確穿過圖像中心,因此主點?(cx,cy)會略微偏離理論中心。
內參成像模型
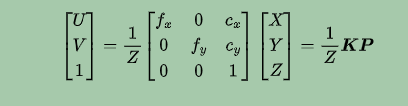
(x,y,z)是物體本身的一個點p相對于相機坐標系的位置。
K就是相機內參。
相機外參
在內參模型中,世界環境中的物體點P給的都是點P相對于相機坐標系下的坐標值:
![]()
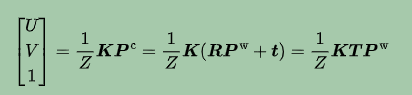
實際情況下,世界環境中的物體點P給出的是點P相對于世界坐標系下的坐標值:
![]()
所以為了使用內參成像模型的公式,就需要將點P在世界坐標系下的位姿轉為點P在相機坐標系下的位姿
相機外參:
相機外參本質上就是一個變換矩陣,用于將世界坐標系中的3D點轉換到相機坐標系。
(關于變換矩陣以及坐標系變換--鏈接)
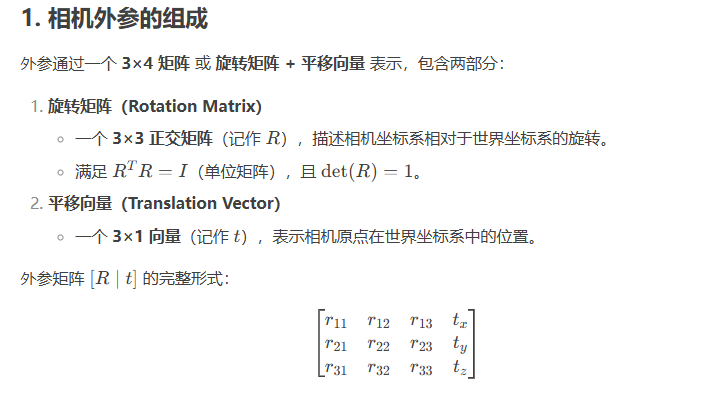
外參成像模型:
旋轉矩陣R:
,我個人理解是世界坐標系到相機坐標系的旋轉矩陣。
就是求解的是相機坐標系下的坐標。
T:
我個人理解是世界坐標系到相機坐標系的變換矩陣。
T就是相機外參。
-- 相機外參就是世界坐標系到相機坐標系的變換矩陣。
成像畸變
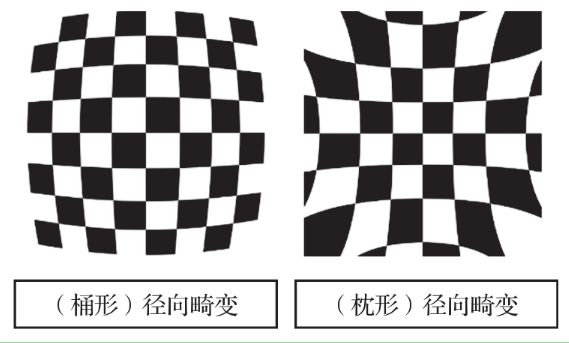
徑向畸變
-
桶形畸變(Barrel Distortion):圖像邊緣向外膨脹,中心收縮(常見于廣角鏡頭)。
-
枕形畸變(Pincushion Distortion):圖像邊緣向內收縮,中心膨脹(常見于長焦鏡頭)。
原因:
光線穿過鏡頭時,邊緣的光線比中心的光線折射更強烈(桶形畸變)或更弱(枕形畸變)。
桶形徑向畸變會導致像素點在像素坐標系上的位姿(x,y)向中心靠攏。
需要通過校正,擴散像素點坐標。
枕形徑向畸變會導致像素點在像素坐標系上的位姿(x,y)擴散。
校正
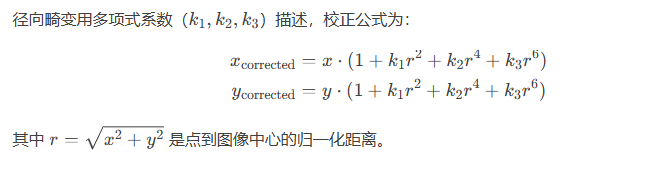
-
點:即像素點,即像素坐標。
-
圖像中心(Principal Point):
光軸與成像平面的交點,坐標為?(cx,cy)(cx?,cy?)(單位:像素),由相機內參定義。
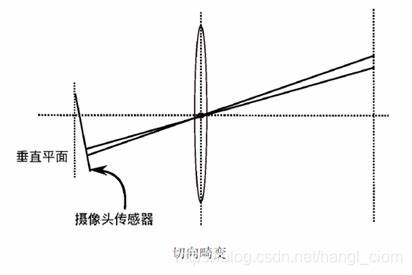
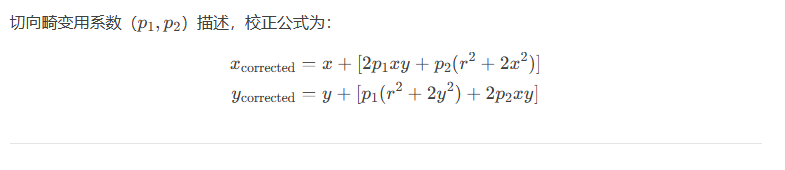
切向畸變
相機鏡頭和圖像傳感器平面由于安裝誤差導致不平行,因此引入了切向畸變。
校正
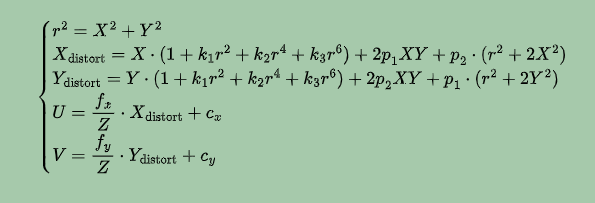
徑向畸變和切向畸變融合校正
相機標定
單目相機標定
目的:相機標定就是進行相機內參和畸變進行標定,利用標定得到的內參K和畸變系數,
,
,
,
對原始圖像進行修正。
一般相機出廠時就自帶相機內參參數。
雙目相機的標定
與單目標定不同的是,雙目相機除了標定相機內參外,還要標定相機外參。
 環境安裝)
)
)
`:優雅處理復雜數據存儲)


)









)


