電流模式控制
電流模式控制(CMC)是開關電源中廣泛使用的一種控制策略,其核心思想是通過內環電流反饋和外環電壓反饋共同調節占空比。相比電壓模式控制,CMC具有更快的動態響應和更好的穩定性,但也存在一些固有缺點。
原理
以buck為例,架構如下
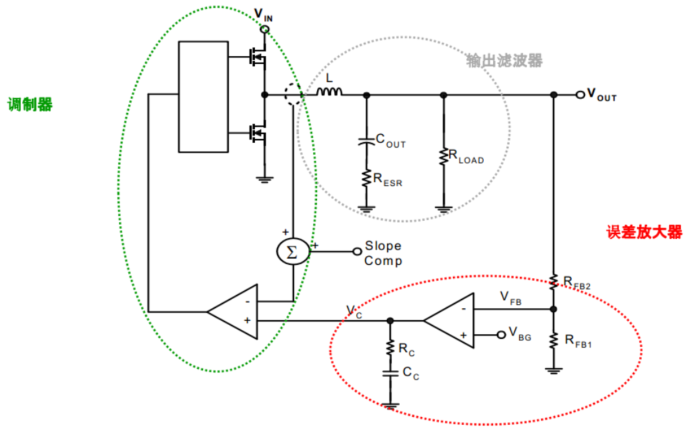
控制結構(雙環結構)
- 內環:電流環,實時檢測電感電流或開關管電流,與電流參考值(由外環生成)比較,生成PWM占空比。
- 外環:電壓環,檢測輸出電壓,通過誤差放大器生成電流參考信號(通常為補償后的電壓誤差信號)。
工作流程
- 輸出電壓采樣:通過分壓電阻得到VFB,與基準電壓比較,經過EA輸出Vc(這個就是電流環的參考信號)。
- 電感電流檢測:這里就有些區分了,可以檢測峰值,平均值,谷底,但原理都是檢測電感電流。
- 峰值電流模式:檢測開關管,如高邊MOSFET導通時的電流峰值。
- 平均電流模式:通過低通濾波或積分電路獲取電感電流平均值。
- 谷底電流模式:在低邊MOSFET導通期間或電感電流下降階段,檢測電流的最小值。
- PWM調制:電流檢測信號Vcs與Vc比較,決定占空比D;當Vcs達到Vc,關閉開關管,實現逐周期限流。
優缺點
優點
- 更快的動態響應:電流內環直接控制電感電流,對負載瞬變響應更快。電壓外環僅需調節電流參考,帶寬要求較低。
- 自動限流保護:逐周期電流檢測,天然防止過流,無需額外保護電路。
- 更好的環路穩定性:電流環將LC濾波器的二階系統降為一階,簡化補償,通常只需Type II補償。
- 輸入電壓擾動抑制:電流環自動抵消Vin變化的影響,無需前饋補償。
缺點
- 次諧波振蕩(占空比 > 50% 時):需斜率補償(Slope Compensation),否則可能不穩定。
- 電流檢測噪聲敏感:電流采樣信號易受開關噪聲干擾,需謹慎布局和濾波。
- 輕載穩定性問題:在DCM下,電流環失效,需特殊處理,如強制進入CCM或跳頻模式。
- 復雜性和成本:需高精度電流檢測電路,如低邊MOSFET Rdson、專用電流傳感器。
應用場景
CMC適用于以下應用:
- 高動態負載場合:如CPU/GPU供電,快速變化的電流需求。
- 寬輸入電壓范圍:如汽車電子的12V-24V系統、工業電源。
- 需要精確限流的應用:如電池充電器、LED驅動。
- 多相并聯電源:CMC易于均流,如服務器VRM。
設計注意事項
電流檢測設計
以峰值電流舉例,舉例說明不同采樣方式及優缺點:
-
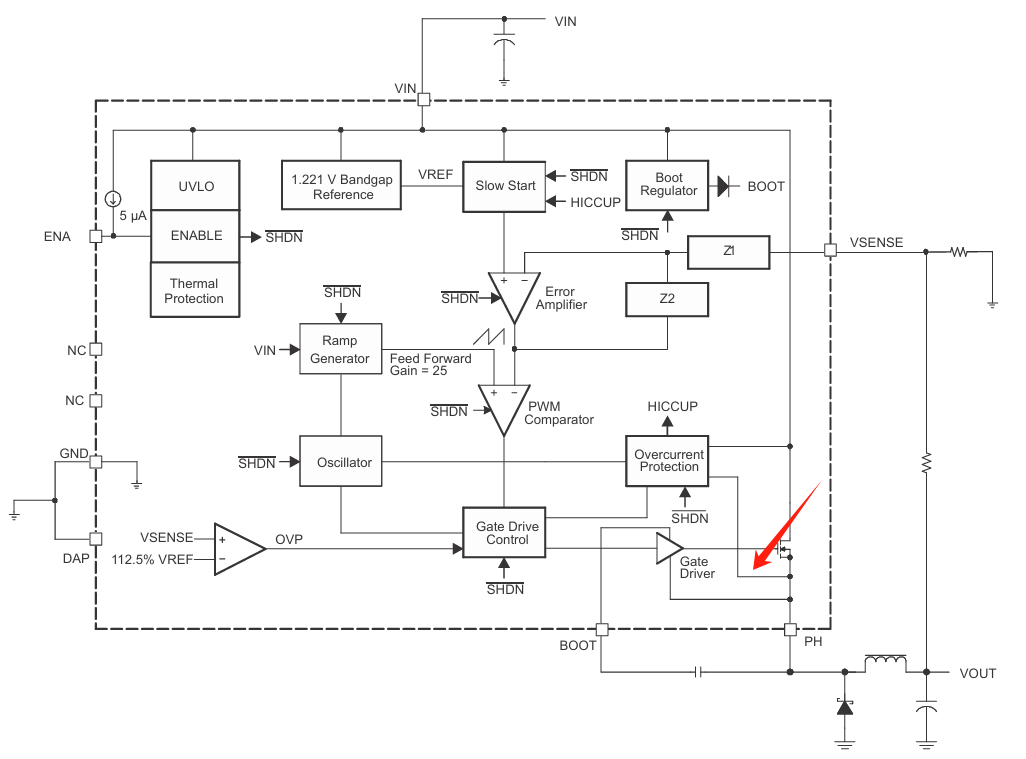
低邊MOS的Rdson:以下管mos的Rdson作為電流采樣元件,Vds=IL*Rdson,這個電壓被放大后與內部參考做比較。其特點是成本低,但溫漂大,要校準,如TI的TPS543。典型應用于工業電源、嵌入式系統(12V→3.3V/5V轉換)。
-
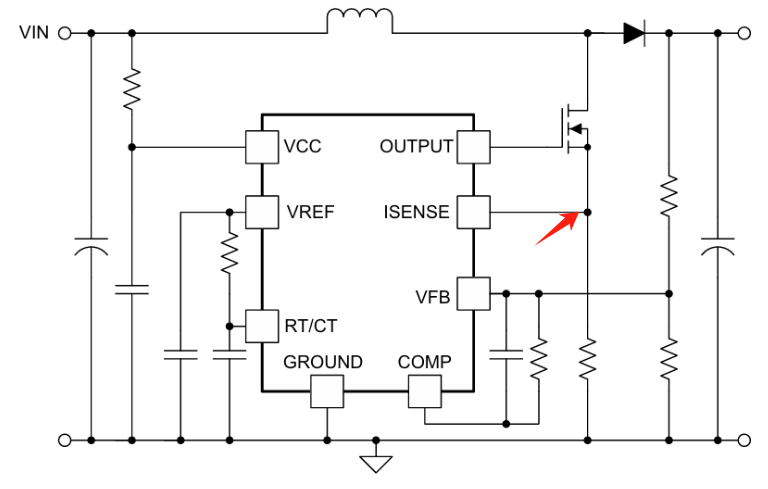
外部分流電阻:通過檢測開關管S極與GND之間的電流采樣電阻電壓,其特點是精度高,但增加損耗。典型應用flyback、forward、boost等。
-
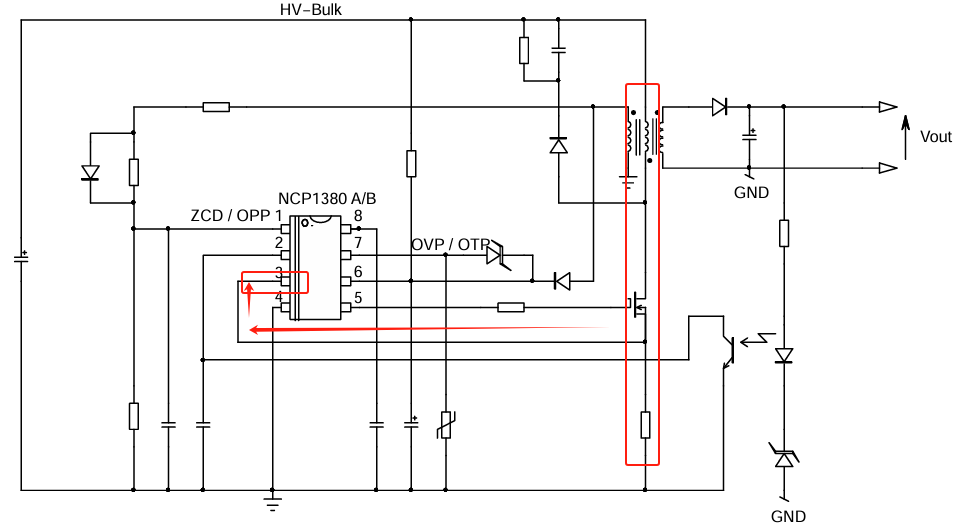
電流互感器:這個比較少,成本高,適用于高頻大電流,如LLC諧振,常用于服務器電源,TV電源等大功率。我找了NCP1380,跟上面的分流電阻一樣,將CT次級電流轉為電壓信號,內部比較器用這個電壓信號實現OCP、ZCD。
PCB布局要點:
- 電流檢測路徑盡量短,避免開關噪聲耦合。
- 使用差分走線減少共模干擾。
次諧波震蕩
Slope Compensation,可以看到上面的框圖中有個Slope Comp,這個是什么呢?這里得提到另外一個概念,次諧波震蕩,這個問題可以說是CMC特有的。次諧波震蕩表現為:電感電流或輸出電壓在開關頻率的1/2、1/3等分頻點處出現周期性波動,導致系統失控。 有點玄乎,我們來看看幾個關鍵點。
什么是電感電流擾動?比如系統中出現了負載突變,使得電感電流突然增大。
在什么工作模式容易出現?峰值電流檢測的CMC。
這個時候的頻率是固定的嗎?對的,用峰值電流檢測,產生的信號通過與FB的電壓信號對比,產生固定的PWM調制信號。
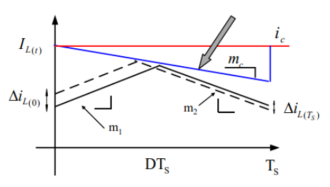
好了,開始分析:在低占空比,小于0.5。如下圖藍色部分是正常的,紅色是出現擾動后的,出現了ΔI,注意現在我們是峰值電流檢測,當電感電流IL達到A點時,(相較于沒有擾動,是提前達到Vc的),MOS關閉,進入續流,因為是提前達到Vc的,所以放電的周期就變大了,而放電的斜率是不變的,所以B點下移,再次導通,因為B點低,達到C點的時間就拉長,C點也就滯后了,同理,經過幾個周期后,越來越靠近穩定波形,是能夠自行調控使得系統穩定的。
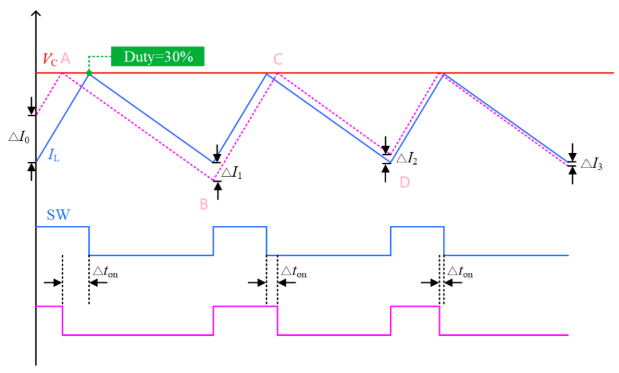
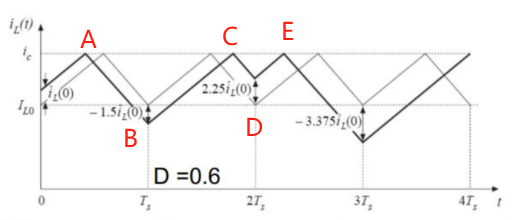
當占空比大(大于0.5),如下圖,電感電流上移,先到了A點,開始放電,等下一個導通,使得B點下移(這個很容易理解吧?先到先放電,放電時間長了,斜率一樣的,肯定先放的值低),這個時候收到了系統指令,充電mos打開,上升斜率是一樣的,值低的需要花更長的時間到達Vc,后面發現,因為占空比大,放電時間沒有了,很短,還沒放一點點又收到系統指令要充電了,這就導致了占空比一會大一會小,從而形成次諧波震蕩。BC長CD短,DE短EF又長。
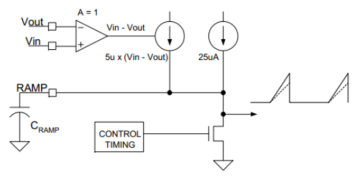
怎么去解決這個問題呢?要是有種辦法,可以使得Vc的值可以變化,不是固定的,先到的,放電時間長一點,后到的放電時間短一點,是不是跟占空比小的情況類似,那么需要把Vc做成一個鋸齒波的形狀,這就是斜率補償。
實現方法:在電流檢測信號上疊加固定斜率斜坡,通常為電感電流上升斜率的50%~100%。
好了,更深的暫時不懂了,先到這里吧,其實對于應用工程師了解是怎么回事就可以,因為很多芯片都集成到里面了。
輕載和DCM
前面說到的DCM問題:電流環在電感電流斷續時失效,可能導致振蕩。
解決方法:
- 強制進入CCM,如增加假負載。
- 采用脈沖跳躍(Pulse Skipping)或突發模式(Burst Mode)。
檢測模式的優缺點
最后來總結下不同電流檢測方式的優缺點吧
峰值電流模式
優點:
- 逐周期限流:天然防止過流,無需額外保護電路。
- 動態響應快:直接控制電流峰值,對負載瞬變響應迅速。
- 簡化補償:電流環將系統降為一階,電壓環只需Type II補償。
- 輸入電壓擾動抑制:自動抵消變化的影響。
缺點:
- 次諧波振蕩:占空比 D>50%時需斜率補償(Slope Compensation)。
- 噪聲敏感:峰值電流檢測易受開關噪聲干擾(需濾波但可能延遲響應)。
- 輕載不穩定:在DCM下電流環失效,可能需強制CCM或跳頻模式。
適用:高動態負載(如CPU/GPU供電)、Boost/Buck-Boost拓撲
平均電流模式
優點:
- 更平滑的電流控制:適用于對電流紋波敏感的應用,如PFC、精密電源。
- 無次諧波振蕩問題:無需斜率補償,適用于任意占空比。
- 抗噪聲能力強:平均濾波減少開關噪聲影響。
缺點:
- 響應速度較慢:因低通濾波引入延遲,動態性能略遜于峰值模式。
- 復雜度高:需額外的電流誤差放大器,增加補償設計難度。
- 成本較高:可能需要高精度電流傳感器。
應用:功率因數校正(PFC)、LED驅動、電池充電器等需要精確電流控制的場合。
谷底電流模式
優點:
- 天然抗噪聲:谷值檢測時開關節點(SW)電壓穩定,噪聲干擾小。
- 適合低占空比:在 D<50% 時穩定性好(如Buck低壓輸出)。
- 輕載效率高:易于實現DCM模式優化(如谷值跳躍)。
缺點:
占空比受限:D>50% 時可能不穩定(需特殊處理)。
動態響應較慢:因谷值檢測滯后于峰值事件。
檢測電路復雜:需精確同步谷值時刻。
適用:低輸出電壓Buck轉換器(如手機PMIC)、輕載高效應用(如IoT設備)。
滯環電流模式
是不是覺得很奇怪?為什么這里也有滯環,其實這個是對其調制方式分類的一個說法,用以區分固定頻率的PWM調制,滯環的窗口是電流那就歸入CMC,滯環判斷的窗口是電壓,那就歸入VMC。
檢測點:設定電流上限和下限(滯環窗口),電感電流在窗口內波動。
特點:
- 無需補償,響應極快,但頻率不固定(變頻控制)。
- 適用于對瞬態響應要求極高的場景(如射頻電源)。
總結,最后再做個特性對比
| 特性 | 峰值電流模式 | 平均電流模式 | 谷底電流模式 |
|---|---|---|---|
| 檢測點 | 電流上升峰值 | 電流平均值 | 電流下降谷值 |
| 是否需要斜率補償 | 是(D>50%) | 否 | 通常否(D<50%) |
| 動態響應 | 最快 | 中等 | 較慢 |
| 抗噪聲能力 | 弱 | 強 | 中等 |
| 輕載穩定性 | 差(需DCM處理) | 中等 | 優(適合DCM) |
| 適用拓撲 | Buck/Boost/Buck-Boost | PFC、精密電源 | 低壓Buck、低占空比 |
| 復雜度 | 低 | 高(需電流誤差放大器) | 中等 |


)
)






:A2A - 谷歌開源的agent通信協議是什么?)








)