ADAS(高級駕駛輔助系統)核心模塊,通過 “監測→預警→干預” 三層邏輯提升行車安全。用戶選擇車輛時,可關注傳感器配置(如是否標配毫米波雷達)、功能覆蓋場景(如 AEB 是否支持夜間行人)及實際測試表現(如 Euro NCAP 評級),優先選擇多傳感器融合方案以應對復雜路況
一、駕駛員疲勞檢測(DFM)
功能:實時監測駕駛員狀態,識別疲勞、分心(如低頭看手機、視線偏離路面)等危險行為,通過預警提醒駕駛員保持注意力。
技術原理:
視覺感知車內攝像頭捕捉駕駛員面部特征(眨眼頻率、眼皮閉合時間、視線方向、頭部傾斜角度),結合紅外技術適應光線變化。
行為分析:融合方向盤轉動頻率、車輛軌跡偏移等數據,通過 AI 算法判斷疲勞等級(如 PERCLOS 指標:眼瞼閉合時間占比)。
預警方式:聲音提示、儀表盤燈光閃爍、方向盤震動,部分高端系統聯動座椅震動或空調調強。
應用場景:長途駕駛、夜間行車時有效降低因疲勞引發的事故風險。

二、前向碰撞預警(FCW)
功能:檢測前方車輛、行人、障礙物,計算碰撞風險,在危險時預警,為駕駛員爭取制動時間。
傳感器:毫米波雷達(測距)、單 / 雙目攝像頭(識別目標類型和距離),部分系統融合激光雷達(LiDAR)。
算法:計算 “碰撞時間(TTC, Time-to-Collision)”,當 TTC 小于安全閾值(如 1.5 秒)時觸發預警。
輸出:儀表盤紅色警示、蜂鳴聲、Head-Up Display(HUD)警告,通常與自動緊急制動(AEB)聯動。
局限:復雜路況(如強光、暴雨)可能影響傳感器精度,需依賴多傳感器融合提升可靠性。

三、車道偏離預警(LDW) & 車道保持輔助(LKA)
1. 車道偏離預警(LDW)
功能:車輛未打轉向燈偏離車道時發出預警,防止因分心或疲勞導致的車道偏移。
技術原理:攝像頭識別車道線(白線、黃線、甚至路沿),結合車輛行駛軌跡判斷偏移趨勢。
預警方式:方向盤震動、聲音提示、儀表盤圖標閃爍。
2. 車道保持輔助(LKA)
功能:在 LDW 基礎上,主動干預方向盤(輕微轉向),幫助車輛保持在車道內,屬于 L2 級自動駕駛核心功能。
車道居中(LCC, Lane Centering Control):持續調整方向,使車輛保持車道中央(如高速巡航場景)。
糾偏輔助:當車輛接近車道線時施加反向力矩,避免壓線。
聯動場景:與自適應巡航(ACC)配合實現 “全速域跟車 + 車道保持”,提升駕駛舒適性。

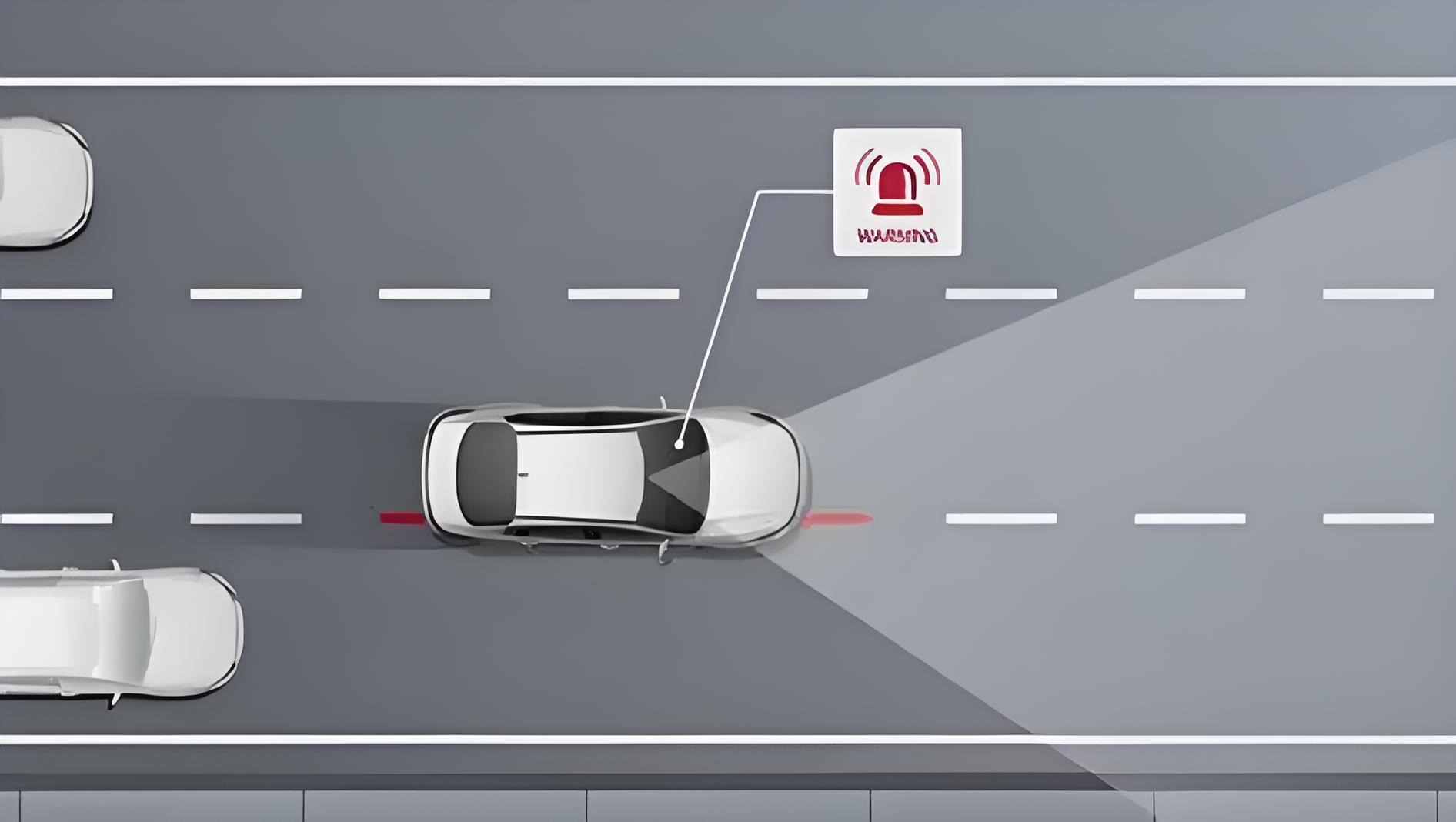
四、盲區檢測(BSD)
功能:監測車輛兩側后視鏡盲區及后方接近的車輛,提示駕駛員安全變道。
毫米波雷達:安裝在后保險杠或后視鏡下方,檢測盲區內的移動物體(精度約 10-30 米)。
攝像頭 / 超聲波傳感器:部分系統輔助識別盲區車輛,增強復雜場景(如靜止車輛、摩托車)的檢測能力。
輸出:后視鏡 LED 燈閃爍、變道時方向盤震動 / 聲音警告,高配車型支持 “盲區主動制動”(如并線時盲區有車,自動糾正方向或制動)。
擴展功能:后方交叉預警(RCTA),倒車時檢測側后方來車(如停車場場景)

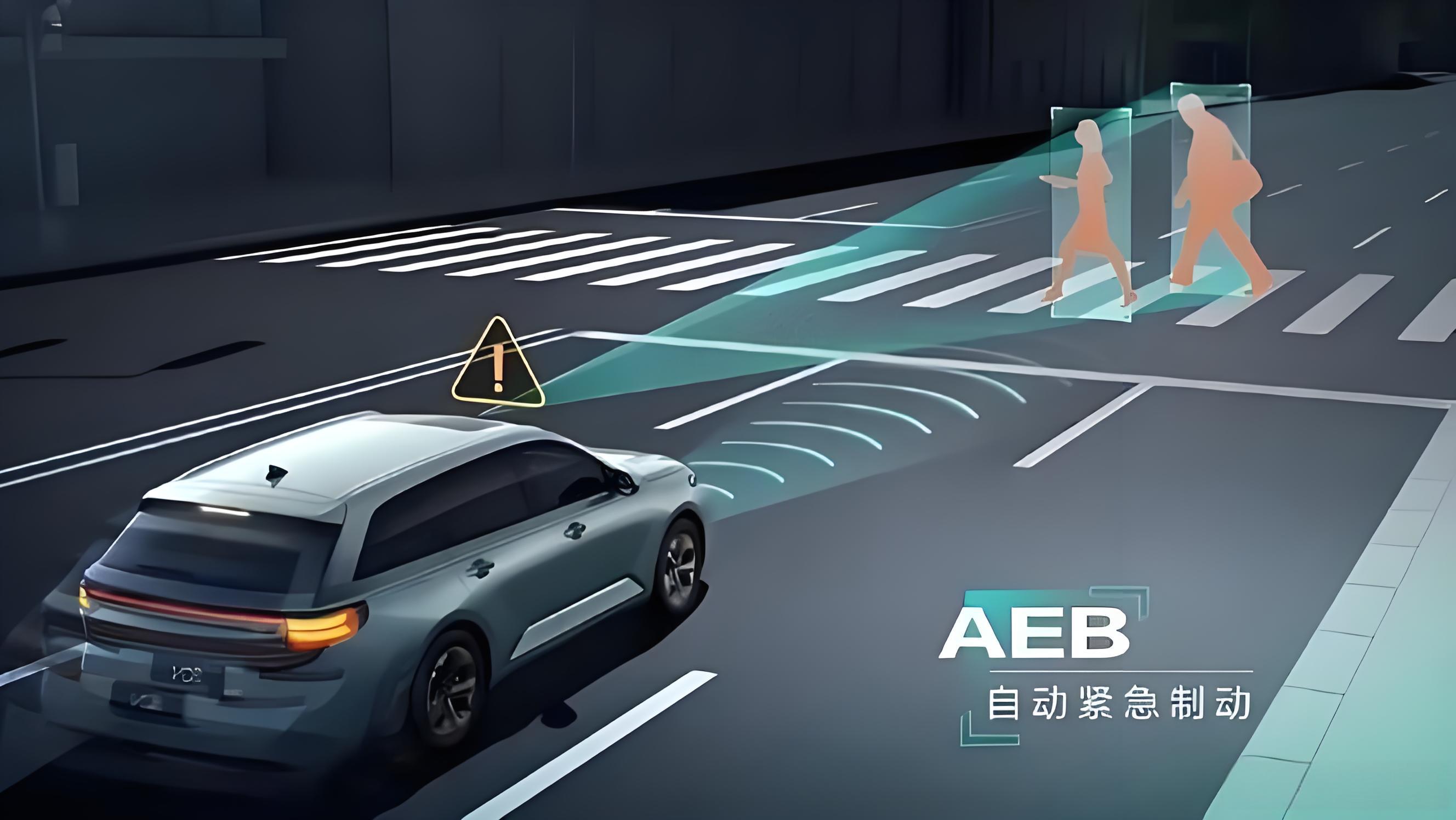
五、自動緊急制動(AEB) & 自動緊急轉向(AES)
1. 自動緊急制動(AEB)
功能:FCW 預警后駕駛員未響應時,自動觸發制動,降低碰撞速度或避免碰撞。
分級制動:先輕剎提醒,再全力制動,部分系統支持 “預填充制動液” 縮短制動距離。
目標類型:覆蓋車輛、行人(夜間識別)、自行車(動態跟蹤),部分高端系統可檢測路口橫穿的行人。
法規推動:歐盟 NCAP、中國 C-NCAP 將 AEB 納入星級評價,倒逼車企標配。
2. 自動緊急轉向(AES,或 Emergency Steering Assist, ESA)
功能:在 AEB 基礎上,若制動無法避免碰撞,系統輔助駕駛員轉向避開障礙物(如避開前方靜止車輛,駛向相鄰空車道)。
路徑規劃:通過傳感器數據實時計算可行避撞路徑,控制 EPS(電動助力轉向系統)施加轉向力矩。
人機協同:僅在駕駛員主動轉向時介入,避免過度干預(如特斯拉 “自動轉向避撞” 功能)。
限制:依賴車道線清晰、相鄰車道無車,復雜場景(如多車道、彎道)成功率受限。

六、系統協同與技術趨勢
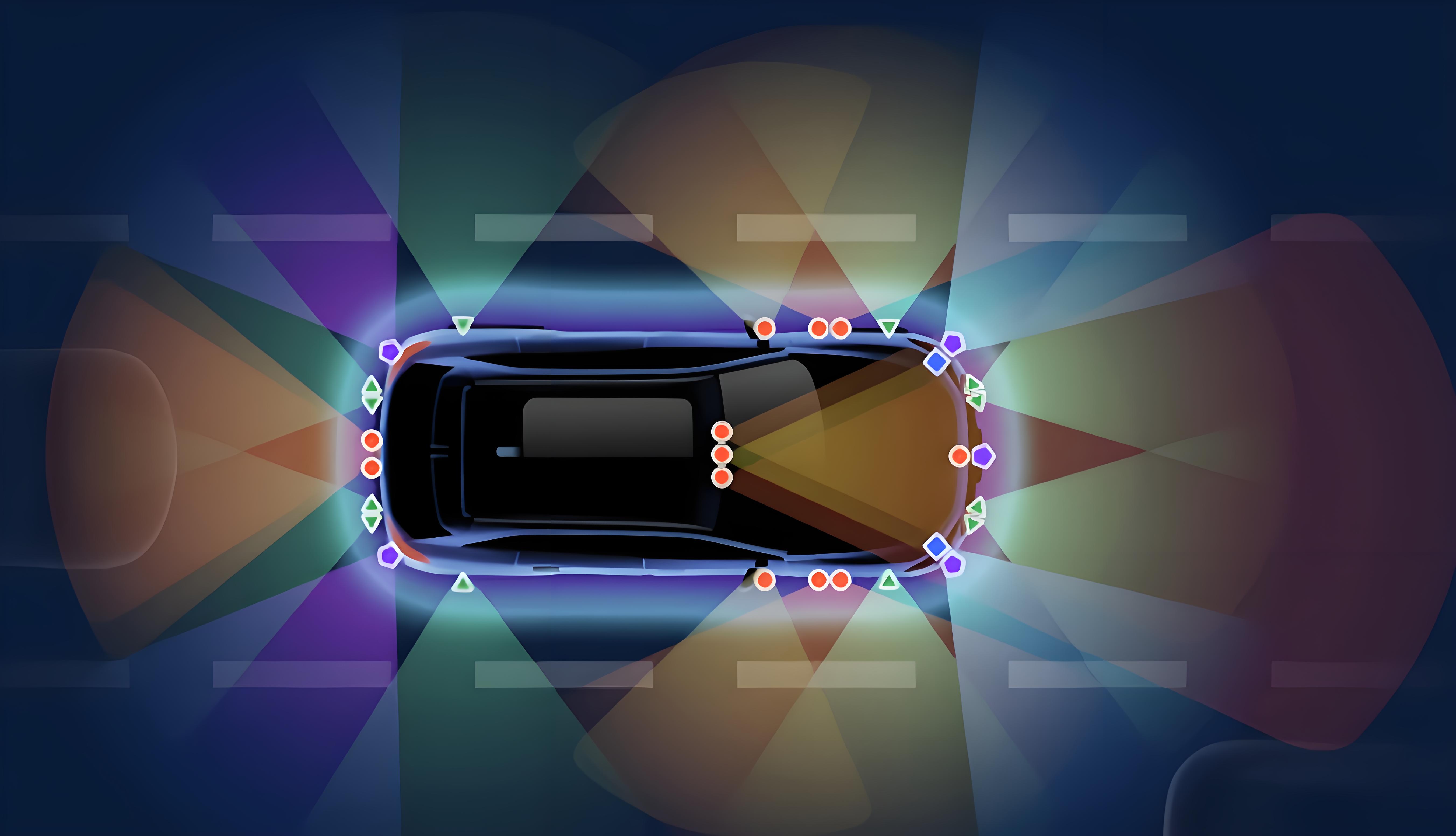
傳感器融合:單一傳感器(如攝像頭)易受環境干擾,主流方案采用 “雷達 + 攝像頭 + 超聲波” 融合(如特斯拉純視覺方案除外),提升復雜場景可靠性。
算力升級:高算力芯片(如 NVIDIA Orin、Mobileye EyeQ6)支持實時處理多路傳感器數據,推動功能向 “全場景覆蓋” 進化(如 AEB 識別橫穿卡車、BSD 聯動自動泊車)。
向自動駕駛過渡:LDW/LKA 是 L2 級基礎,AEB/BSD 是 L2 + 必備功能,未來高階自動駕駛(L3+)需依賴這些系統的深度集成(如城市道路自動避障)。

的軌跡仿真,主要用于模擬升力體在不同飛行階段(初始滑翔段、滑翔段、下壓段)的運動軌跡)








)






)

