文章目錄
- 2.2_5 調度算法
- 一、適用于早期的批處理系統
- (一)先來先服務(FCFS,First Come First Serve)
- (二)短作業優先(SJF,Shortest Job First)
- (三)高響應比優先(HRRN,Highest Response Ratio Next)
- 總結
- 二、適用于交互式系統
- (一)時間片輪轉(RR,Round-Robin)
- (二)優先級調度算法
- (三)多級反饋隊列調度算法
- 總結
- 三、多級隊列調度算法
2.2_5 調度算法
注意:各種調度算法的學習思路如下。
1.算法思想
2.算法規則
3.這種調度算法是用于作業調度還是進程調度?
4.搶占式 or 非搶占式?
5.優點 or 缺點?
6.是否會導致饑餓
饑餓:指某進程/作業長期得不到服務。
一、適用于早期的批處理系統
(一)先來先服務(FCFS,First Come First Serve)
FCFS
1.算法思想
??主要從“公平”的角度考慮。(類似于我們生活中排隊買東西的例子)
2.算法規則
??按照作業/進程到達的先后順序進行服務
3.用于作業/進程調度
??用于作業調度時,考慮的是哪個作業先到達后備隊列;用于進程調度時,考慮的是哪個進程先到達就緒隊列。
4.是否可搶占?
??非搶占式的算法
5.優缺點
??優點:公平、算法實現簡單
??缺點:排在長作業(進程)后面的短作業需要等待很長時間,帶權周轉時間很大,對短作業來說用戶體驗不好。即,FCFS算法對長作業有利,對短作業不利。
6.是否會導致饑餓
??不會。
例子
??各進程到達就緒隊列的時間、需要的運行時間如下表所示。使用先來先服務調度算法,計算各進程的等待時間、平均等待時間、周轉時間、平均周轉時間、帶權周轉時間、平均帶權周轉時間。
| 進程 | 到達時間 | 運行時間 |
|---|---|---|
| P1 | 0 | 7 |
| P2 | 2 | 4 |
| P3 | 4 | 1 |
| P4 | 5 | 4 |
??先來先服務算法:按照到達的先后順序調度,事實上就是等待時間越久的越優先得到服務。
??因此,調度順序為:P1 —> P2 —> P3 —> P4。

答:
??1.周轉時間 = 完成時間 - 到達時間
P1=7-0=7;P2=11-2=9;P3=12-4=8;P4=16-5=11
??2.帶權周轉時間 = 周轉時間 / 運行時間
P1=7/7=1;P2=9/4=2.25;P3=8/1=8;P4=11/4=2.75
注意:帶權周轉時間就是
周轉時間是實際運行時間的多少倍。而P3這個進程的帶權周轉時間是8,也就意味著P3這個用戶的體驗其實是非常糟糕的。
??3.等待時間 = 周轉時間 - 運行時間
注:對本題而言,可以這樣計算等待時間。原因在于,本題中的進程都是純計算型(即:只需要CPU)的進程,一個進程到達后要么在等待、要么在運行。如果是又有計算、又有I/O操作的進程,其
等待時間就是周轉時間 - 運行時間 - I/O操作的時間。P1=7-7=0;P2=9-4=5;P3=8-1=7;P4=11-4=7
??4.平均周轉時間 = (7+9+8+11) / 4 = 8.75
??5.平均帶權周轉時間 = (1+2.25+8+2.75) / 4 = 3.5
??6.平均等待時間 = (0+5+7+7) / 4 = 4.75
(二)短作業優先(SJF,Shortest Job First)
SJF
1.算法思想
??追求最少的平均等待時間,最少的平均周轉時間,最少的平均帶權周轉時間。
2.算法規則
??最短的作業/進程優先得到服務(所謂“最短”,是指要求服務時間最短)
3.用于作業/進程調度
??既可用于作業調度,也可用于進程調度。
??但用于進程調度時,名稱要換一下,稱為“短進程優先(SPF,Shortest Process First)算法”。
4.是否可搶占?
??SJF和SPF是非搶占式的算法。
??但是也有搶占式的版本——最短剩余時間優先算法(SRTN,Shortest Remaining Time Next)。
5.優缺點
??優點:“最短的”平均等待時間、平均周轉時間
??缺點:不公平。對短作業有利,對長作業不利。可能產生饑餓現象。另外,作業/進程的運行時間是由用戶提供的,并不一定真實,不一定能做到真正的短作業優先。
6.是否會導致饑餓
??會。如果源源不斷地有短作業/進程到來,可能使長作業/進程長時間得不到服務,產生“饑餓”現象。如果一直得不到服務,則稱為“餓死”。
例子1
??各進程到達就緒隊列的時間、需要的運行時間如下表所示。使用非搶占式的短作業優先調度算法,計算各進程的等待時間、平均等待時間、周轉時間、平均周轉時間、帶權周轉時間、平均帶權周轉時間。
注:嚴格來說,用于進程調度,它的算法名稱應該叫做“短進程優先調度算法(SPF)”,不用在意這個細節,算法本質都是一樣的。
| 進程 | 到達時間 | 運行時間 |
|---|---|---|
| P1 | 0 | 7 |
| P2 | 2 | 4 |
| P3 | 4 | 1 |
| P4 | 5 | 4 |
??短作業/進程優先調度算法:每次調度時選擇當前已到達且運行時間最短的作業/進程。
??因此,調度順序為:P1 —> P3 —> P2 —> P4。

答:
??1.周轉時間 = 完成時間 - 到達時間
P1=7-0=7;P3=8-4=4;P2=12-2=10;P4=16-5=11
??2.帶權周轉時間 = 周轉時間 / 運行時間
P1=7/7=1;P3=4/1=4;P2=10/4=2.5;P4=11/4=2.75
??3.等待時間 = 周轉時間 - 運行時間
P1=7-7=0;P3=4-1=3;P2=10-4=6;P4=11-4=7
??4.平均周轉時間 = (7+4+10+11) / 4 = 8
??5.平均帶權周轉時間 = (1+4+2.5+2.75) / 4 = 2.56
??6.平均等待時間 = (0+3+6+7) / 4 = 4
注意:對比FCFS算法的結果,顯然SPF算法的平均等待/周轉/帶權周轉時間都要更低。
例子2
??各進程到達就緒隊列的時間、需要的運行時間如下表所示。使用搶占式的短作業優先調度算法,計算各進程的等待時間、平均等待時間、周轉時間、平均周轉時間、帶權周轉時間、平均帶權周轉時間。
注:搶占式的短作業優先算法又稱“最短剩余時間優先算法”(SRTN)
| 進程 | 到達時間 | 運行時間 |
|---|---|---|
| P1 | 0 | 7 |
| P2 | 2 | 4 |
| P3 | 4 | 1 |
| P4 | 5 | 4 |
??最短剩余時間優先算法:每當有進程加入就緒隊列改變時就需要調度,如果新到達的進程剩余時間比當前運行的進程剩余時間更短,則由新進程搶占處理機,當前運行進程重新回到就緒隊列。另外,當一個進程完成時也需要調度(即:一個進程主動放棄處理機的時候)。
??需要注意的是,當有新進程到達時就緒隊列就會改變,就要按照上述規則進行檢查。

??以下Pn(m)表 示當前Pn進程剩余時間為m。各個時刻的情況如下:
??0時刻(P1到達):P1(7)
??2時刻(P2到達):P1(5)、P2(4)
??4時刻(P3到達):P1(5)、P2(2)、P3(1)
??5時刻(P3完成且P4剛好到達):P1(5)、P2(2)、P4(4)
??7時刻(P2完成):P1(5)、P4(4)
??11時刻(P4完成) :P1(5)
答:
??1.周轉時間 = 完成時間 - 到達時間
P1=16-0=16;P2=7-2=5;P3=5-4=1;P4=11-5=6
??2.帶權周轉時間 = 周轉時間 / 運行時間
P1=16/7=2.28;P2=5/4=1.25;P3=1/1=1;P4=6/4=1.5
??3.等待時間 = 周轉時間 - 運行時間
P1=16-7=9;P2=5-4=1;P3=1-1=0;P4=6-4=2
??4.平均周轉時間 = (16+5+1+6)/4 = 7
??5.平均帶權周轉時間 = (2.28+1.25+1+1.5)/4 = 1.50
??6.平均等待時間 = (9+1+0+2)/4 = 3
注意:對比非搶占式的短作業優先算法,顯然搶占式的這幾個指標又要更低
??對于“短作業優先”,注意幾個小細節:
??1.如果題目中未特別說明,所提到的“短作業/進程優先算法”默認是非搶占式的。
??2.很多書上都會說“SJF調度算法的平均等待時間、平均周轉時間最少”。
??嚴格來說,這個表述是錯誤的、不嚴謹的。之前的例子已經表明,最短剩余時間優先算法得到的平均等待時間、平均周轉時間還要更少。
??因此,嚴謹來說,應該說“搶占式的短作業/進程優先調度算法(最短剩余時間算法,SRNT算法)的平均等待時間、平均周轉時間最少”。
??或者加上前提條件(從而削弱搶占式的優勢),說:“在所有進程同時可運行時(或:在所有進程都幾乎同時到達時),采用SJF調度算法的平均等待時間、平均周轉時間最少”。
??3.雖然嚴格來說,SJF的平均等待時間、平均周轉時間并不一定最少,但相比于其他算法,SJF依然可以獲得較少的平均等待時間、平均周轉時間。
??4.如果選擇題中遇到“SJF算法的平均等待時間、平均周轉時間最少”的選項,那最好先判斷其他選項是不是有很明顯的錯誤,靈活做出判斷。
(三)高響應比優先(HRRN,Highest Response Ratio Next)
??對FCFS和SJF兩種算法的思考:
??1.FCFS算法是在每次調度的時候選擇一個等待時間最長的作業(進程)為其服務。但是沒有考慮到作業的運行時間,因此導致了對短作業不友好的問題。
??2.SJF算法是選擇一個執行時間最短的作業為其服務。但是又完全不考慮各個作業的等待時間,因此導致了對長作業不友好的問題,甚至還會造成饑餓問題。
??那么,能不能設計一個算法,既考慮到各個作業的等待時間,也能兼顧運行時間呢?——高響應比優先算法。
1.算法思想
??要綜合考慮作業/進程的等待時間和要求服務的時間。
2.算法規則
??在每次調度時先計算各個作業/進程的響應比,選擇響應比最高的作業/進程為其服務。
響 應 比 = 等 待 時 間 + 要 求 服 務 時 間 要 求 服 務 時 間 響應比=\frac{等待時間+要求服務時間}{要求服務時間} 響應比=要求服務時間等待時間+要求服務時間?
注:由公式可見,響應比≥1。
3.用于作業/進程調度
??既可以用于作業調度,也可用于進程調度。
4.是否可搶占?
??非搶占式的算法。因此只有當前運行的作業/進程主動放棄處理機時,才需要調度,才需要計算響應比。
5.優缺點
??綜合考慮了等待時間和運行時間(要求服務時間)。
??等待時間相同時,要求服務時間短的優先(SJF的優點)。
??要求服務時間相同時,等待時間長的優先(FCFS的優點)。
??對于長作業來說,隨著等待時間越來越久,其響應比也會越來越大,從而避免了長作業饑餓的問題。
6.是否會導致饑餓
??不會。
例子
??各進程到達就緒隊列的時間、需要的運行時間如下表所示。使用高響應比優先調度算法,計算各進程的等待時間、平均等待時間、周轉時間、平均周轉時間、帶權周轉時間、平均帶權周轉時間。
| 進程 | 到達時間 | 運行時間 |
|---|---|---|
| P1 | 0 | 7 |
| P2 | 2 | 4 |
| P3 | 4 | 1 |
| P4 | 5 | 4 |
??高響應比優先算法:非搶占式的調度算法,只有當前運行的進程主動放棄CPU時(正常/異常完成,或主動阻塞),才需要進行調度,調度時計算所有就緒進程的響應比,選響應比最高的進程上處理機。
響 應 比 = 等 待 時 間 + 要 求 服 務 時 間 要 求 服 務 時 間 響應比=\frac{等待時間+要求服務時間}{要求服務時間} 響應比=要求服務時間等待時間+要求服務時間?

答:
??0時刻:只有P1到達就緒隊列,P1上處理機
??7時刻(P1主動放棄CPU):就緒隊列中有P2(響應比=(5+4)/4=2.25)、P3((3+1)/1=4)、P4((2+4)/4=1.5)
注意:從嚴格的計算結果來比較,沒問題。但也可以從公式理解的方面去考慮,而不必計算出具體結果。如,在
7時刻想要比較P2和P4的響應比,應該注意到,P2和P4要求服務的時間一樣,但P2此時等待時間長,因此必然是P2的響應比更大。
??8時刻(P3完成):P2(2.5)、 P4(1.75)
??12時刻(P2完成):就緒隊列中只剩下P4
總結

注意:這幾種算法主要關心對用戶的公平性、平均周轉時間、平均等待時間等評價系統整體性能的指標,但是不關心“響應時間”,也并不區分任務的緊急程度,因此對用戶來說,交互性很糟糕。因此這三種算法一般適合用于早期的批處理系統。當然,FCFS算法也常結合其他的算法使用,在現在也扮演著很重要的角色。
早期的計算機CPU也比較昂貴,因此主要注重的是系統整體性能表現,并不注重用戶感受,也是情有可原的。
??而適合用于交互式系統的調度算法將在后面介紹。
二、適用于交互式系統

(一)時間片輪轉(RR,Round-Robin)
1.算法思想
??公平地、輪流地為各個進程服務,讓每個進程在一定時間間隔內都可以得到響應。
??其實是伴隨著分時操作系統出現的一種思想。
2.算法規則
??按照各進程到達就緒隊列的順序,輪流讓各個進程執行一個時間片(如100ms)。若進程未在一個時間片內執行完,則剝奪處理機,將進程重新放到就緒隊列隊尾重新排隊。
??時間片的長短,具體看系統,有的系統長、有的系統短,甚至有的系統的時間片長短是動態調整的。
3.用于作業/進程調度
??用于進程調度。
??因為所謂“時間片”,指的是處理機的時間片,而一個作業只有被放入內存并建立相關PCB后,只有作為進程,它才有可能被分配處理機的時間片。
4.是否可搶占
??若進程未能在時間片內運行完,將被強行剝奪處理機使用權,因此時間片輪轉調度算法屬于搶占式的算法。由時鐘裝置發出時鐘中斷來通知CPU時間片已到。
5.優缺點
??優點:公平;響應快,適用于分時操作系統。
??缺點:由于高頻率的進程切換,因此有一定開銷;不區分任務的緊急程度。
6.是否會導致饑餓
??不會。
7.補充
??時間片太大或太小,分別會造成影響。時間片太大,會使進程響應時間過長;時間片太小,會使進程切換的開銷占比過大。
例子
??各進程到達就緒隊列的時間、需要的運行時間如下表所示。使用時間片輪轉調度算法,分析時間片大小分別是2、5時的進程運行情況。
??注意:“時間片輪轉”常用于分時操作系統,更注重“響應時間”,因而此處不計算周轉時間等指標。
| 進程 | 到達時間 | 運行時間 |
|---|---|---|
| P1 | 0 | 5 |
| P2 | 2 | 4 |
| P3 | 4 | 1 |
| P4 | 5 | 6 |
答1:
??時間片大小為2時。

??注:以下括號內表示當前時刻就緒隊列中的進程,以及進程的剩余時間。用箭頭表示隊列,左邊是隊頭、右邊是隊尾
??0時刻(P1(5)):0時刻只有P1到達就緒隊列,讓P1上處理機運行一個時間片。
??2時刻(P2(4) —> P1(3)):2時刻P2到達就緒隊列,P1運行完一個時間片,被剝奪處理機,重新放到隊尾。
??此時P2排在隊頭,因此讓P2上處理機。
??注意:2時刻,P1下處理機,同一時刻新進程P2到達,如果在題目中遇到這種情況,默認新到達的進程先進入就緒隊列。

??4時刻(P1(3) —> P3(1) —> P2(2)):4時刻,P3到達,先插到就緒隊尾,緊接著,P2下處理機也插到隊尾。
??5時刻(P3(1) —> P2(2) —> P4(6)):5時刻,P4到達插到就緒隊尾(注意:由于P1的時間片還沒用完,因此暫時不調度。另外,此時P1處于運行態,并不在就緒隊列中)
??說明:
??1.之所以討論
5時刻時的情況,是因為在這一時刻,P4進程到達了。??2.但是在
5時刻,P1只運行了1單位的時間,時間片還沒有用完。因此P1還處于執行狀態,并不會被剝奪處理機,因此P1并不會出現在就緒隊列當中。??3.接下來P1會把自己的時間片執行完,即
6時刻的時候,再繼續討論。

??6時刻(P3(1) —> P2(2) —> P4(6) —> P1(1)):6時刻,P1時間片用完,下處理機,重新放回就緒隊尾,發生調度。

??7時刻(P2(2) —> P4(6) —> P1(1)):雖然P3的時間片沒用完,但是由于P3只需運行1個單位的時間,運行完了會主動放棄處理機,因此也會發生調度。隊頭進程P2上處理機。
??注意:雖然時間片大小為2,但如果進程本身只需運行1個單位的時間(如進程P3),同樣也會發生調度。只不過此時不是P3被剝奪處理機,而是P3進程主動放棄處理機。

??9時刻(P4(6) —> P1(1)):進程P2時間片用完,并剛好運行完,發生調度,P4上處理機。
??11時刻(P1(1) —> P4(4)):P4時間片用完,重新回到就緒隊列。P1上處理機。
??12時刻(P4(4)):P1運行完,主動放棄處理機,此時就緒隊列中只剩P4,P4上處理機。
??14時刻():就緒隊列為空,因此讓P4緊接著運行一個時間片。
??16時刻:所有進程運行結束。
答2:
??時間片大小為5時。

??0時刻(P1(5) ):只有P1到達,P1上處理機。
??2時刻(P2(4)):P2到達,但P1時間片尚未結束,因此暫不調度 。
??4時刻(P2(4) —> P3(1)):P3到達,但P1時間片尚未結束,因此暫不調度。
??5時刻( P2(4) —> P3(1) —> P4(6) ):P4到達,同時,P1運行結束。發生調度,P2上處理機。
??9時刻( P3(1) —> P4(6) ):P2運行結束,雖然時間片沒用完,但是會主動放棄處理機。發生調度。
??10時刻( P4(6) ):P3運行結束,雖然時間片沒用完,但是會主動放棄處理機。發生調度。
??15時刻( ):P4時間片用完,但就緒隊列為空,因此會讓P4繼續執行一個時間片。
??16時刻( ):P4運行完,主動放棄處理機。所有進程運行完。
??此時,分析——若按照先來先服務調度算法:
??會發現,它的執行過程,與時間片大小為5的時間片輪轉調度算法是類似的。

??結論:如果時間片太大,使得每個進程都可以在一個時間片內就完成,則時間片輪轉調度算法退化為先來先服務調度算法,并且會增大進程響應時間。因此時間片不能太大。
??另一方面,進程調度、切換是有代價的(保存、恢復運行環境),因此如果時間片太小,會導致進程切換過于頻繁,系統會花大量的時間來處理進程切換,從而導致實際用于進程執行的時間比例減少。可見,時間片也不能太小。
??說明1:什么叫“增大進程響應時間”?
??答:比如,系統中有10個進程在并發執行,如果時間片為1秒,則一個進程被響應可能需要等9秒。也就是說,如果用戶在自己進程的時間片外通過鍵盤發出調試命令,可能需要等待9秒才能被系統響應。而如果時間片為10ms,則一個進程被響應可能需要等90ms。
??說明2:如何定義“時間片太小”?
??答:一般來說,設計時間片時要讓切換進程的開銷占比不超過1%。
(二)優先級調度算法
1.算法思想
??隨著計算機的發展,特別是實時操作系統的出現,越來越多的應用場景需要根據任務的緊急程度來決定處理順序。
2.算法規則
??每個作業/進程有各自的優先級,調度時選擇優先級最高的作業/進程。
3.用于作業/進程調度
??既可用于作業調度,也可用于進程調度。甚至,還會用于在之后學習的I/O調度中。
4.是否可搶占
??搶占式、非搶占式都有。
??區別在于:非搶占式只需在進程主動放棄處理機時進行調度既可;而搶占式還需在就緒隊列發生變化時,檢查是否會發生搶占。
5.優缺點
??優點:用優先級區分緊急程度、重要程度,適用于實時操作系統。可靈活地調整對各種作業/進程的偏好程度。
??缺點:若源源不斷地有高優先級進程到來,則可能導致饑餓。
6.是否會導致饑餓
??會。
例子1
??各進程到達就緒隊列的時間、需要的運行時間、進程優先數如下表所示。使用非搶占式的優先級調度算法,分析進程運行情況。(注:優先數越大,優先級越高)
??說明:有的題目當中,也可能規定為——優先數越小,優先級越高。所以對于優先數的概念,要具體讀題目條件。
| 進程 | 到達時間 | 運行時間 | 優先數 |
|---|---|---|---|
| P1 | 0 | 7 | 1 |
| P2 | 2 | 4 | 2 |
| P3 | 4 | 1 | 3 |
| P4 | 5 | 4 | 2 |
答:

??注:以下括號內表示當前處于就緒隊列的進程
??0時刻(P1):只有P1到達,P1上處理機。
??7時刻(P2、P3、P4):P1運行完成主動放棄處理機,其余進程都已到達,P3優先級最高,P3上處理機。
??8時刻(P2、P4):P3完成,P2、P4優先級相同,由于P2先到達,因此P2優先上處理機。
??12時刻(P4):P2完成,就緒隊列只剩P4,P4上處理機。
??16時刻( ):P4完成,所有進程都結束。
例子2
??各進程到達就緒隊列的時間、需要的運行時間、進程優先數如下表所示。使用搶占式的優先級調度算法,分析進程運行情況。(注:優先數越大,優先級越高)
| 進程 | 到達時間 | 運行時間 | 優先數 |
|---|---|---|---|
| P1 | 0 | 7 | 1 |
| P2 | 2 | 4 | 2 |
| P3 | 4 | 1 | 3 |
| P4 | 5 | 4 | 2 |
??注意,搶占式的優先級調度算法:每次調度時選擇當前已到達且優先級最高的進程。當前進程主動放棄處理機時發生調度。另外,當就緒隊列發生改變時也需要檢查是否會發生搶占。

注:以下括號內表示當前處于就緒隊列的進程
0時刻(P1):只有P1到達,P1上處理機。
2時刻(P2):P2到達就緒隊列,優先級比P1更高,發生搶占。P1回到就緒隊列,P2上處理機。
4時刻(P1、P3):P3到達,優先級比P2更高,P2回到就緒隊列,P3搶占處理機。
5時刻(P1、P2、P4):P3完成,主動釋放處理機,同時,P4也到達,由于P2比P4更先進入就緒隊列, 因此選擇P2上處理機。
7時刻(P1、P4):P2完成,就緒隊列只剩P1、P4,P4上處理機。
11時刻(P1 ):P4完成,P1上處理機。
16時刻():P1完成,所有進程均完成。
補充:
??就緒隊列未必只有一個,可以按照不同優先級來組織。
??另外,也可以把優先級高的進程排在更靠近隊頭的位置。
??根據優先級是否可以動態改變,可將優先級分為靜態優先級和動態優先級兩種。
??靜態優先級:創建進程時確定,之后一直不變。
??動態優先級:創建進程時有一個初始值,之后會根據情況動態地調整優先級。
問題1:如何合理地設置各類進程的優先級?
??通常的原則:
??1.系統進程優先級 高于 用戶進程
??2.前臺進程優先級 高于 后臺進程
??3.操作系統更偏好I/O型進程(或稱I/O繁忙型進程)
說明:與I/O型進程相對的是計算型進程(或稱CPU繁忙型進程)。
說明:為什么偏好I/O型進程?——已知I/O設備和CPU可以并行工作。如果優先讓I/O繁忙型進程優先運行的話,則越有可能讓I/O設備盡早地投入工作,則資源利用率、系統吞吐量都會得到提升。
問題2:如果采用的是動態優先級,什么時候應該調整?
??可以從追求公平、提升資源利用率等角度考慮。
?? 如果某進程在就緒隊列中等待了很長時間,則可以適當提升其優先級。
??如果某進程占用處理機運行了很長時間,則可適當降低其優先級。
??如果發現一個進程頻繁地進行I/O操作,則可適當提升其優先級。
??(有點類似于“高響應比優先”算法中的響應比的概念。可以理解為,“響應比”就是一種“動態優先級”。)
(三)多級反饋隊列調度算法
思考:
??FCFS算法的優點是公平;
??SJF算法的優點是能盡快處理完短作業,平均等待/周轉時間等參數很優秀;
??時間片輪轉調度算法可以讓各個進程得到及時的響應;
??優先級調度算法可以靈活地調整各種進程被服務的機會。
??那么,能否對這些算法做個折中權衡,得到一個綜合表現優秀平衡的算法呢?——多級反饋隊列調度算法。
1.算法思想
??對其他調度算法的折中權衡。
2.算法規則
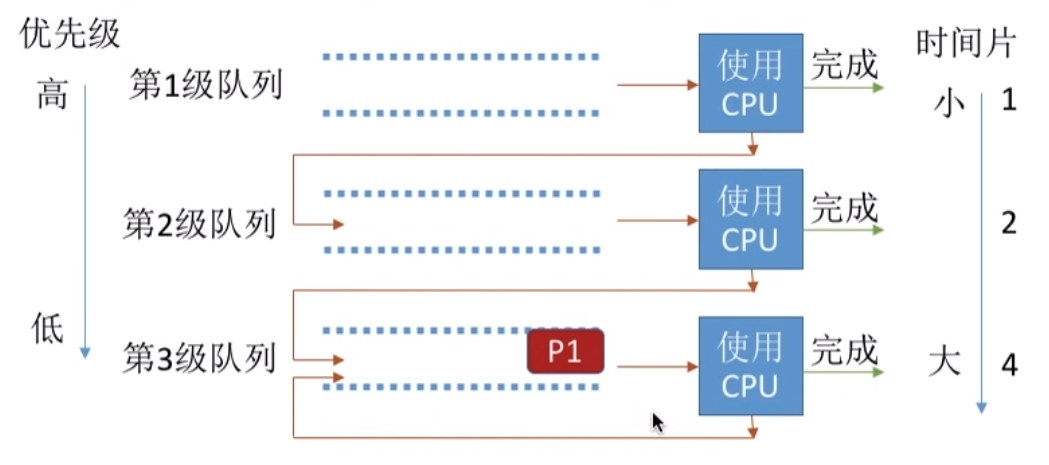
??1)設置多級就緒隊列,各級隊列優先級從高到低,時間片從小到大。
??2)新進程到達時先進入第1級隊列,按FCFS原則排隊等待被分配時間片,若用完時間片進程還未結束,則進程進入下一級隊列隊尾。如果此時已經是在最下級的隊列,則重新放回該隊列隊尾。
??3)只有第k級隊列為空時,才會為k+1級隊頭的進程分配時間片。
3.用于作業/進程調度
??用于進程調度。
4.是否可搶占
??搶占式的算法。在k級隊列的進程運行過程中,若更上級的隊列(1~k-1級)中進入了一個新進程,則由于新進程處于優先級更高的隊列中,因此新進程會搶占處理機,原來運行的進程放回k級隊列隊尾。
??注:在實現的過程中,其實是可以將其實現為非搶占式的版本,但以教材上為準,認為它是一個搶占式的算法。
5.優缺點
??對各類進程相對公平(FCFS的優點);
??每個新到達的進程都可以很快就得到響應(RR的優點);
??短進程只用較少的時間就可以完成(SPF的優點);
??不必實現估計進程的運行時間(避免用戶作假);
??可靈活地調整對各類進程的偏好程度,比如CPU密集型進程、I/O密集型進程(說明:可將因I/O而阻塞的進程重新放回原隊列,這樣I/O型進程就可以保持較高優先級)。
6.是否會導致饑餓
??會。
例子
??各進程到達就緒隊列的時間、需要的運行時間如下表所示。使用多級反饋隊列調度算法,分析進程運行的過程。
| 進程 | 到達時間 | 運行時間 |
|---|---|---|
| P1 | 0 | 8 |
| P2 | 1 | 4 |
| P3 | 5 | 1 |
答:
??設置多級就緒隊列,各級隊列優先級從高到低,時間片從小到大。

??新進程到達時先進入1級隊列,按FCFS原則排隊等待被分配時間片。若用完時間片進程還未結束,則進程進入下一級隊列隊尾。如果此時已經在最下級的隊列,則重新放回最下級隊列隊尾。
??只有第k級隊列為空時,才會為k+1級隊頭的進程分配時間片。
??被搶占處理機的進程重新放回原隊列隊尾。
例子

??如圖,0時刻P1到達,進入第1級隊列隊尾。P1上處理機運行1個單位的時間(因為第1級隊列的時間片就是1)。之后,由于P1進程還未運行完,因此P1進入第2級隊列隊尾。

??此時為1時刻,因此P2同時會到達。此時,由于更高級別(即:第1級)的隊列中還有進程沒處理完,因此暫時不會處理更低級別(即:第2級)的隊列。
??因此,1時刻會選擇P2上處理機運行。同樣地,P2運行的時間片大小為1個單位時間。此外,P2運行后,會被放到下一級隊列的隊尾。

??在2時刻,由于第1級隊列為空了(更高級的隊列為空),所以會對第2級隊列進行調度(才會對更低級的隊列進行調度)。
??因此,此時選擇第2級隊列隊頭的進程上處理機運行一個時間片,即P1進程上處理機運行2個單位的時間。
??同理,P1執行完一個時間片后,P1進程還沒運行結束,因此會被放到第3級隊列中。

??此時,先處理較高級別隊列中的進程,因此會讓P2上處理機運行。

??需要注意的是,在P2還未執行滿一個時間片的時刻5的時候,此時進程P3到達,P3進入第1級隊列。
??由于此時有更高優先級的進程到達,所以會發生搶占處理機的情況,所以此時P2進程會被剝奪處理機,但是P2并不是放到下一級隊列,而是放回原級隊列的隊尾。

??5時刻,P3搶占地上處理機運行。運行完1個單位的時間之后,剛好進程P3也運行完畢,所以P3執行完成后就可以調出內存了。

??6時刻,又是P2繼續運行。由于在這之前P2已經總共運行了2個單位的時間(在第1級隊列中運行了一個時間片 + 在第2級隊列中運行了半個時間片時被剝奪),所以在這次,P2上處理機運行完一個時間片后,就可以運行完畢,調出內存了。

??8時刻,讓進程P1上處理機運行(注:P1在這之前,已運行了共計3個單位的時間)一個時間片,即運行了4個單位的時間。由于P1進程還沒有運行完,因此按理說應該往更低1級的隊列去放入,但此時已經沒有更低級別的隊列了,P1也已經沒辦法再往下放了,因此它只會被重新放回最低級隊列的隊尾,再次等待被調度。
??12時刻,P1被調度,運行1個單位的時間后,P1完成,并調出內存。
總結

??注:比起早期的批處理操作系統來說,由于計算機造價大幅降低,因此之后出現的交互式操作系統(包括分時操作系統、實時操作系統等)更注重系統的響應時間、公平性、平衡性等指標。而這幾種算法恰好也能較好地滿足交互式系統的需求。因此這三種算法適合用于交互式系統。(比如UNIX使用的就是多級反饋隊列調度算法)
三、多級隊列調度算法
??系統中按進程類型設置多個隊列,進程創建成功后插入某個隊列。
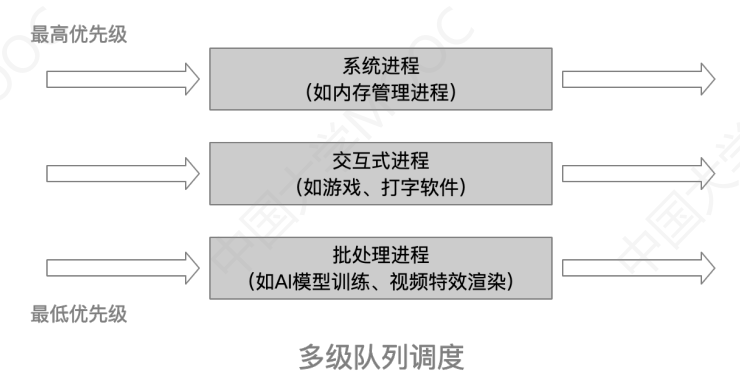
??注:最上面那個隊列優先級最高,往下依次降低。
??說明:為什么圖中這樣設置各個進程的優先級。
??首先,系統進程的優先級最高,這無可厚非。
??另外,交互式進程需要得到比較及時的響應和反饋(如打游戲、打字的時候,你當然希望你的鍵盤/鼠標點下去之后就立即得到一個反饋),因此顯然需要被賦予更高的優先級,這樣才能更快地響應用戶的請求。
??最后,批處理進程的優先級較低,這個就很好理解了,例如模型訓練、視頻渲染,這種進程的優先級稍設置的低一些,對用戶的體驗來說也并沒有那么糟糕。
問題1:每次調度應該選中哪個隊列?
??隊列之間可采取固定優先級,或時間片劃分。
??1.固定優先級:高優先級空時,低優先級進程才能被調度。
??注:這其實是不太合理的。比如用戶現在正在打字,但是只要系統進程有一個在就緒隊列里面,那你這個打字的動作就一直不會被響應,用戶體驗就會很糟糕。
??2.時間片劃分:如三個隊列分配時間50%、40%、10%。
??說明:比如一個時間片的長度為100ms。在這一個時間片的時間段中,
前50ms先被用來處理系統進程隊列、中間40ms被用來處理交互式進程隊列、最后10ms被用來處理批處理進程隊列。??這種方法可以保證,在固定的一段時間內,任何類型的進程都至少被響應一次。
問題2:在選定某個隊列后,該隊列中如此多的同類型進程,該選哪個進行調度?
??各隊列可采用不同的調度策略。
??如:
??系統進程隊列采用優先級調度。那么,誰的優先級更高、誰更緊急,我就先處理誰。
??交互式隊列采用RR。時間片輪轉調度算法可以保證,各個交互式進程在較短的一個時間周期內,都可以至少被響應1次。
??批處理隊列采用FCFS。






)

)



——二叉樹)






)