摘要:本文介紹平衡車的組裝與接線方法
前邊介紹了所要實現的平衡車的組成,接下來就來把小車組裝起來。首先是下層底板的底面要固定兩個輪子。這個只要固定孔位沒有問題,用螺絲直接將輪子支架固定上去就可以了。固定好后如下圖所示:
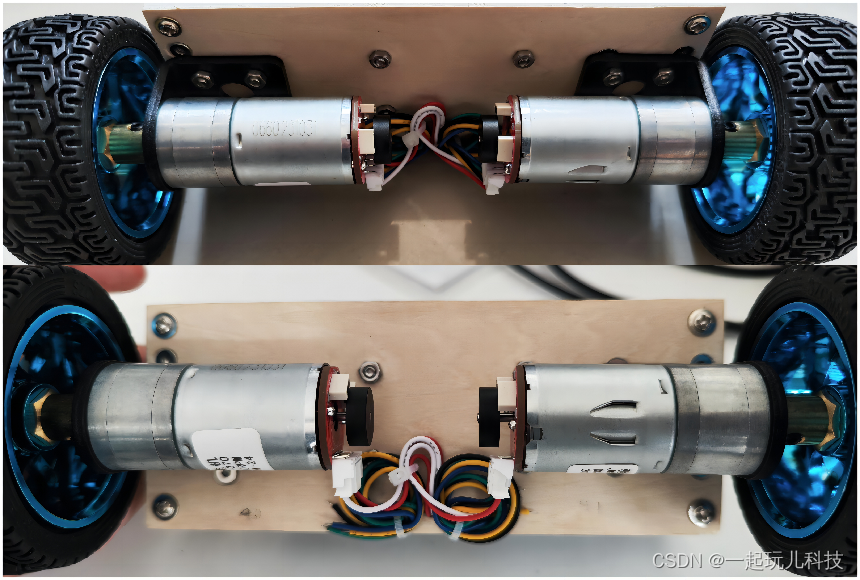
在安裝車輪的時候,要特別注意的一點是,一定要保證兩個電機的軸在一條直線上,這樣兩個輪子在同向旋轉的時候發力是垂直于軸向并且向同一個方向的,不會出現能量的內耗。另外就是兩輪的軸線要位于兩個長邊中心線的正上方,這樣小車初始重心就會落在兩輪的軸線上,更有利于最終的直立平衡。同樣的,安裝其他設備到小車上的時候,也盡量以軸線為中心,將質量平均的分布在軸線的兩側,這樣在平衡的時候,你的小車看上去才是平的。否則,可能在小車平衡的時候,車底板不是水平的,看上去會有些怪怪的。
在底板的另一面,我安裝了鋰電池盒、LM2596S穩壓模塊和TB6612FNG電機驅動模塊,電池安裝在了正中央,另外兩個模塊一左一右。安裝好后的樣子如下圖所示:

電池盒的左邊是TB6612FNG電機驅動模塊,下邊通過一個面包板固定在底板上,中間使用了排針插座,這樣將來還可以把TB6612FNG電機驅動模塊拔下來繼續使用。右側的LM2596S穩壓模塊則是利用安裝孔和M3銅柱,直接固定在了小車下層底板上。電池盒也是通過螺絲穿過底部固定孔固定在下層底板上的。這些器件的固定一定要牢固,不能晃動,因為在調試甚至運行階段,小車都有可能有激烈的震動,固定不牢固一方面可能引起導線的短路或者連接不實,另一方面還有可能造成小車重心位置的改變而影響小車直立的穩定性。
下邊就是給ESP32系統板和姿態模塊MPU6050供電的AMS1117模塊,我把它安裝在了車身上層板的靠近邊上的底面,裝完之后,面朝下。之所以這樣安裝,是因為我在車身頂層板的中間挖了個洞,然后在空洞處安裝了一塊兒面包板,在這個面包板上焊接底座后,可以在正面插上ESP32系統板和MPU6050模塊,所以,將穩壓電源模塊AMS1117安裝在上層板的底面會更方便些,如下圖所示:

最后就是ESP32模塊和MPU6050模塊通過2.54mm的插座插在了面包板上,裝好后的樣子如下圖所示:

好了,全部器件都找到位置安裝了,下面就來看一下如何接線了。電池盒內部的過充、過放、短路保護模塊的安裝就不再介紹了,可以參考前一篇文章。
下面來看一下底層底板和上層穩壓模塊的接線方法,如圖所示:
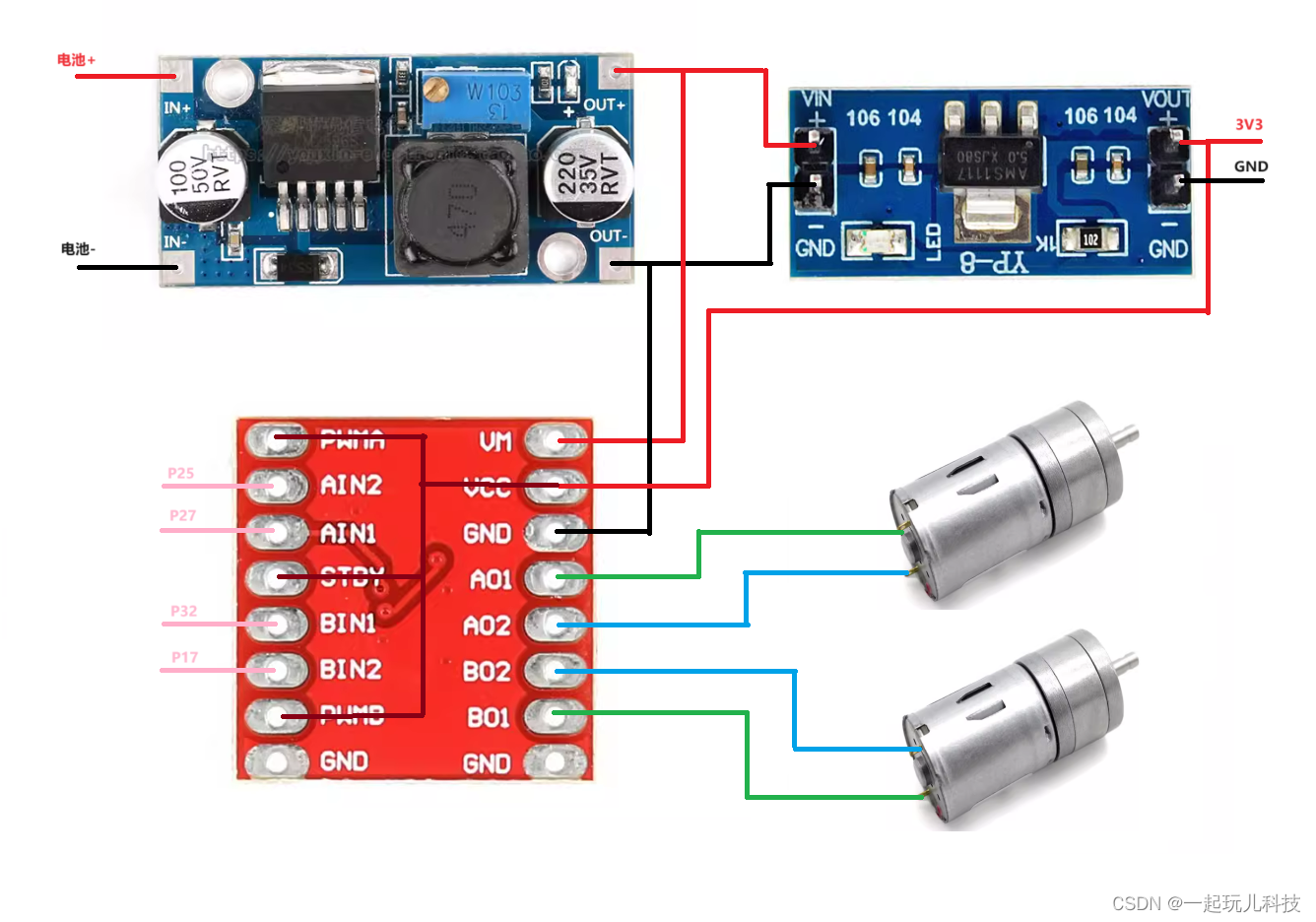
在上圖中可以看到,電池盒的輸出正負極直接連接LM2596S穩壓模塊的輸入端IN+和IN-。穩壓模塊LM2596S穩壓模塊的輸出端分別接穩壓模塊ASM1117的VIN+和GND以及電機驅動模塊TB6612FNG的VM和GND。ASM1117的兩個輸出端VOUT和GND分別供電給電機驅動模塊TB6612FNG的VCC端、ESP32的VCC、GND端和姿態模塊MPU6050的VCC、GND端。
在這里需要注意的是,電機驅動模塊TB6612FNG的PWMA端、STBY端和PWMB端都要連接到VCC,也就是保持始終是高電平。然后TB6612FNG模塊的AIN1、AIN2、BIN1和BIN2連接到ESP32的控制引腳,如果不是使用我標注的引腳,那么在后邊編寫程序的時候一定別忘了做相應的修改。最后就是TB6612FNG的AO1、AO2連接到左電機,BO1、BO2連接到右電機。電機的兩根電源線是隨便連接的,后面如果發現電機轉動方向不對,軟件交換一下控制引腳就可以了。
最后就是ESP32模塊和MPU6050的接線了,在完成這兩個模塊的供電線之后,就只剩下兩者之間I2C通訊的SDA和SCL線需要連接了。在這里,將MPU6050的SDA、SCL連接到ESP32的P18和P19就可以了。如果不是這兩個引腳,后邊注意在程序中做相應的修改。
好了,所有的連線就都介紹完了。為了避免遺漏,給大家整理了一張表格,建議連線的時候對著表格,每連好一根就打勾記錄一下,避免遺漏。表格如下所示:
| 電池盒+ | LM2596S的IN+ | £ |
| 電池盒- | LM2596S的IN- | £ |
| LM2596的OUT+ | ASM1117的VIN | £ |
| TB6612FNG的VM | £ | |
| LM2596的OUT- | ASM1117的GND | £ |
| TB6612FNG的GND | £ | |
| ASM1117的VOUT | TB6612FNG的VCC | £ |
| TB6612FNG的PWMA | £ | |
| TB6612FNG的PWMB | £ | |
| TB6612FNG的STBY | £ | |
| ESP32的VCC | £ | |
| MPU6050的VCC | £ | |
| ASM1117的GND | ESP32的GND | £ |
| MPU6050的GND | £ | |
| TB6612FNG的AIN1 | ESP32的P27 | £ |
| TB6612FNG的AIN2 | ESP32的P25 | £ |
| TB6612FNG的BIN1 | ESP32的P32 | £ |
| TB6612FNG的BIN2 | ESP32的P17 | £ |
| TB6612FNG的AO1 | 左電機 | £ |
| TB6612FNG的AO2 | 左電機 | £ |
| TB6612FNG的BO1 | 右電機 | £ |
| TB6612FNG的BO2 | 右電機 | £ |
| ESP32的P18 | MPU6050的SDA | £ |
| ESP32的P19 | MPU6050的SCL | £ |
有了這個清單,就可以按照清單一點點的來接線了。在下一期中,將詳細的介紹接線的流程,以及每一步都要進行的測試,確保整個接線工作可以順利完成。好了,下期再見!






)

)


)







