目錄
- 問題:
- 閱讀關鍵點:
- 總結
問題:
-
根據對預測模塊代碼的分析,發現預測框出現在點云前方的原因在于跟蹤框出現在點云前方
-
對rviz上的目標進行觀察后發現
-
車輛的檢測框先出來一段時間后,跟蹤框和預測框同步一塊出來
-
跟蹤框總是超出點云一部分
-
閱讀關鍵點:
-
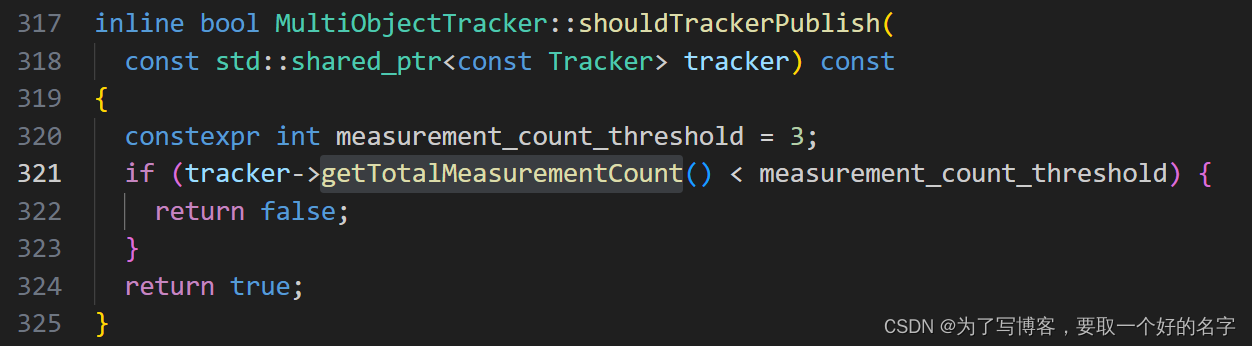
每個跟蹤器最少要統計三幀的數據才可以發布,三幀的數據是程序中寫死的,也可以修改
-
這個情況說明該跟蹤器無法有效針對”鬼探頭”的情況,最少要0.3s的時間才能做出反應
-
當目標出現前后兩幀類別識別錯誤、移動距離過遠(歐式距離、馬氏距離)、形狀尺寸變化過大、朝向轉動幅度過大、2dIOU比例過小等情況,就會出現目標丟失的情況,默認兩幀之間無關聯,從而進入新的跟蹤器,再次累積3幀數據。造成延時的假象。
-









![[法規規劃|方案實操]數據資產入表,城投將獲融資新渠道](http://pic.xiahunao.cn/[法規規劃|方案實操]數據資產入表,城投將獲融資新渠道)



)


)


