文章目錄
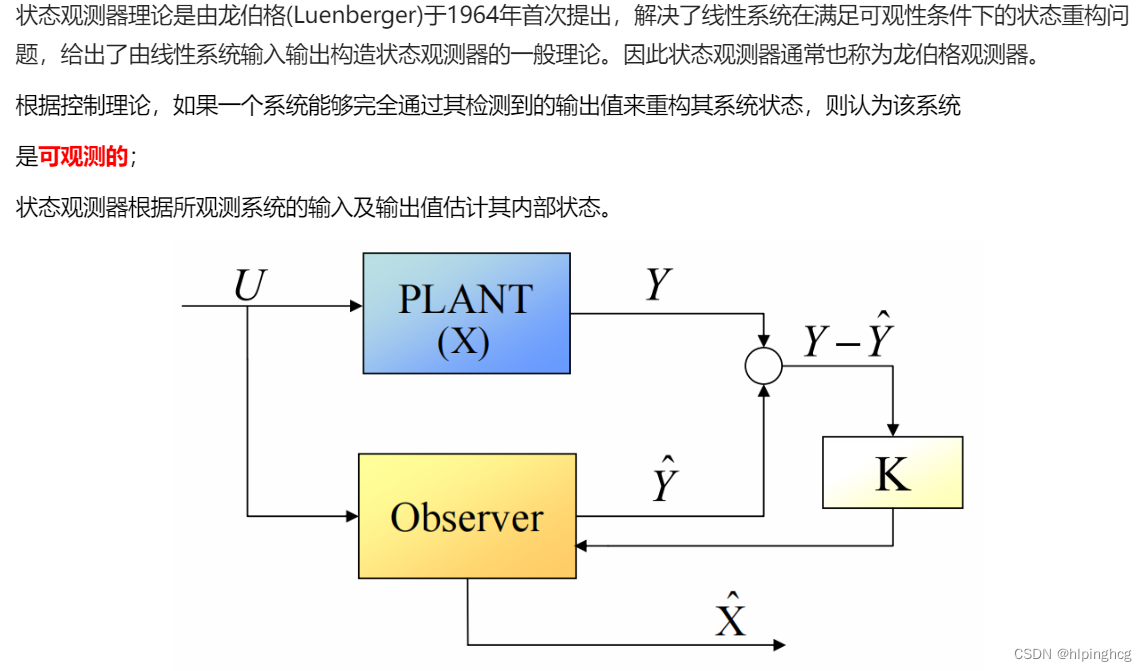
- 1、觀測器的引入
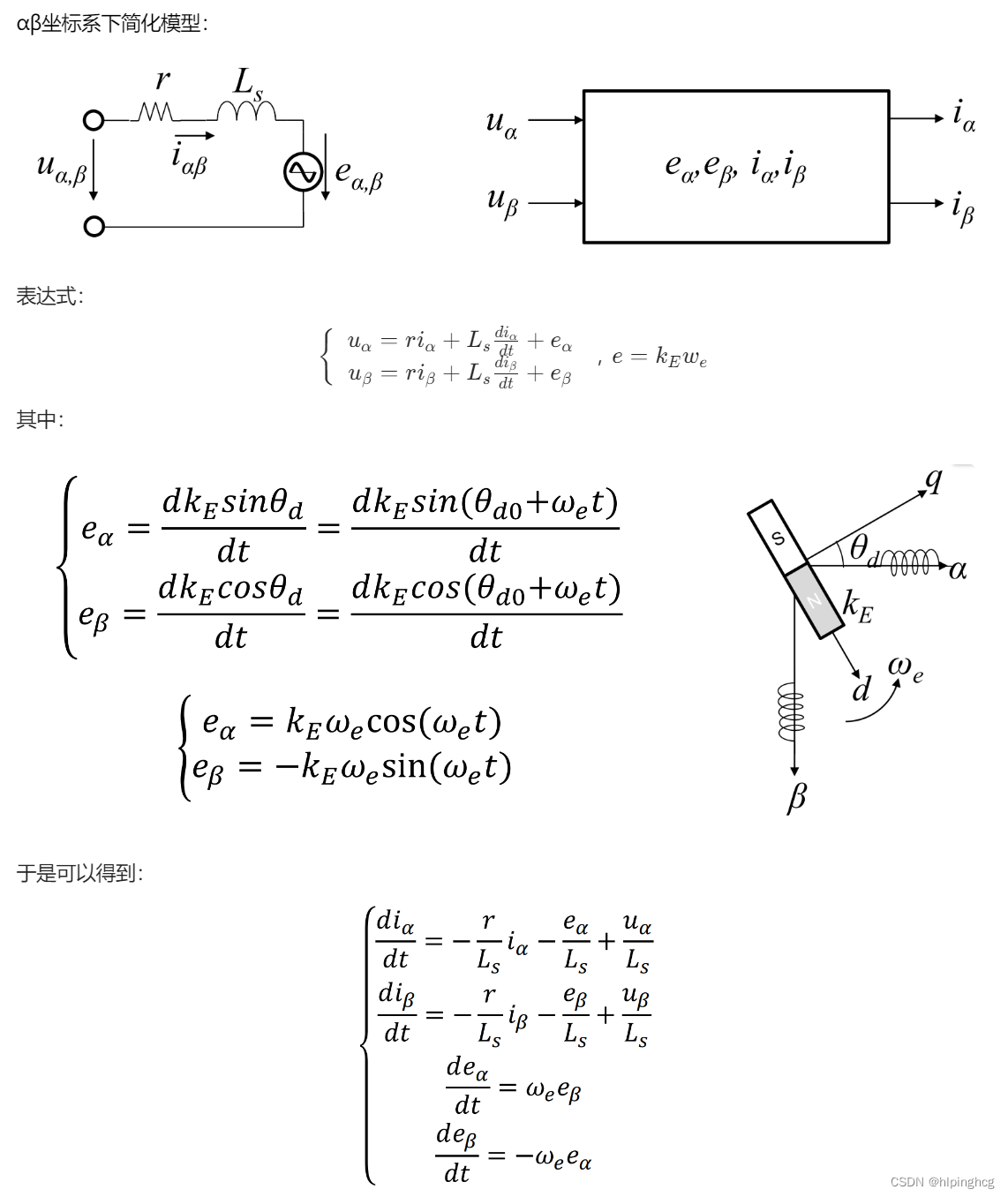
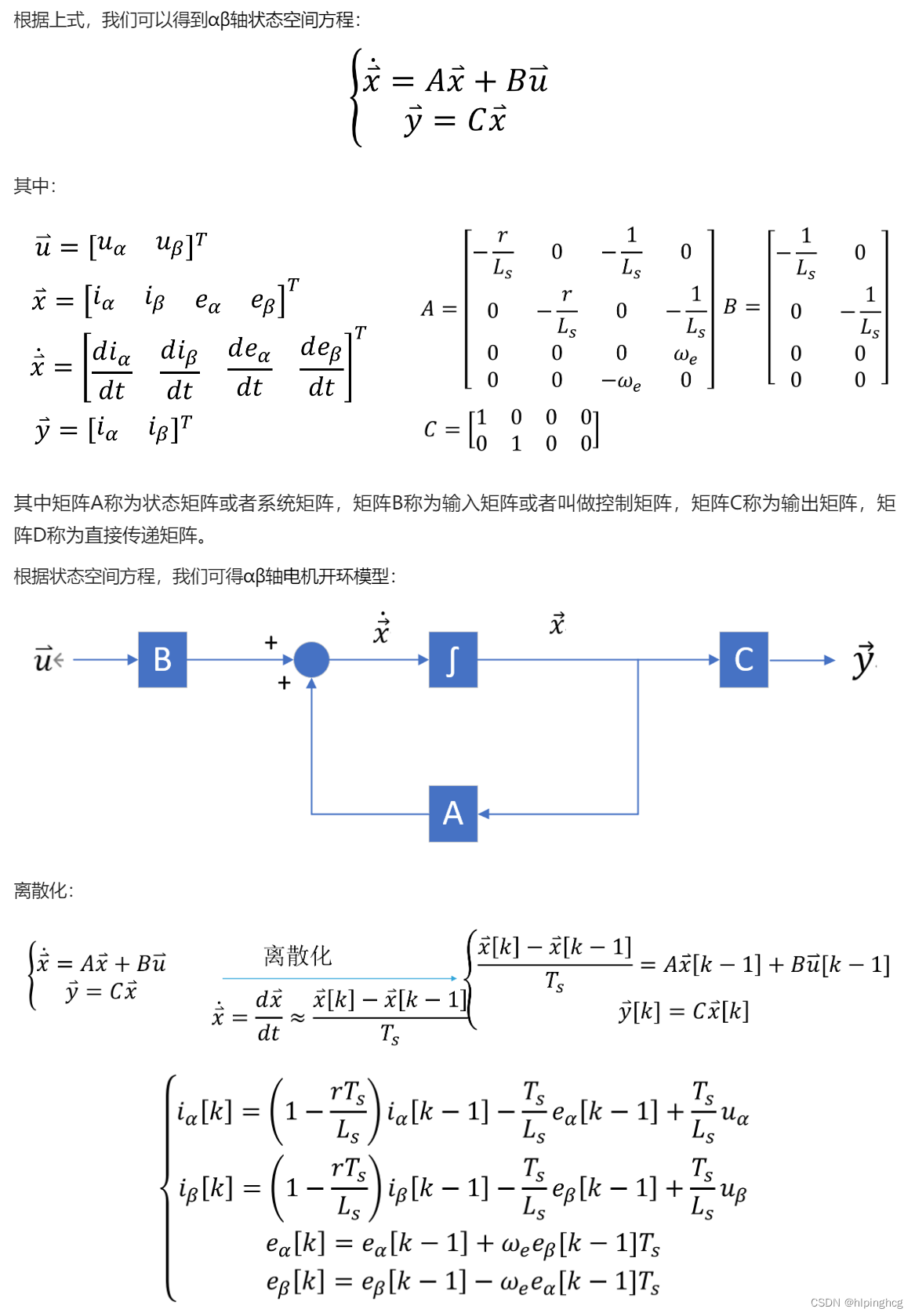
- 2、β軸向下的電機觀測器數學模型
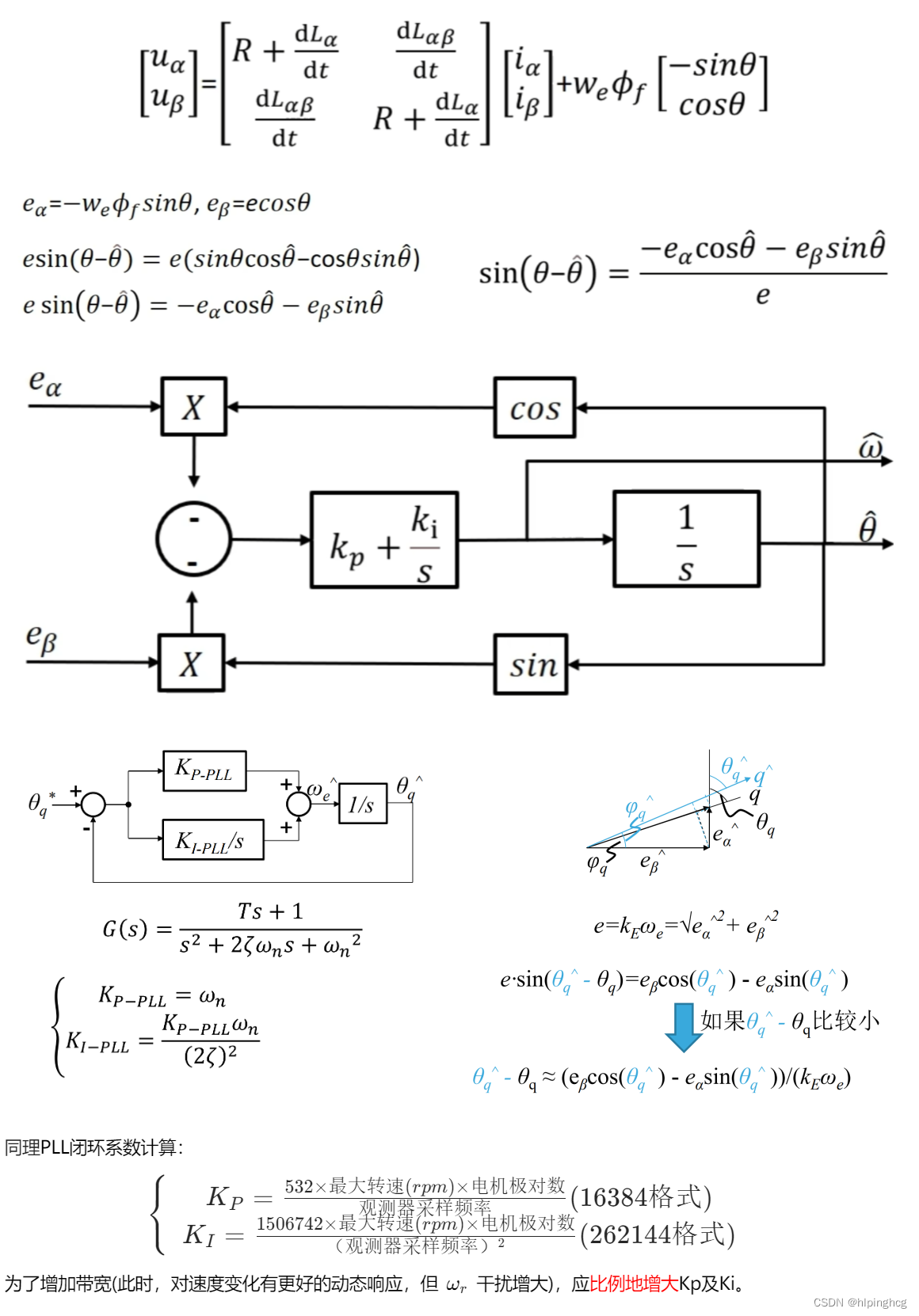
- 3、β軸向下的轉子點角度及速度觀測
- 4、Simulink仿真模型搭建
- 4.1模型總覽
- 4.2 Luenberger觀測器模塊
- 4.2.1 I_alpha觀測
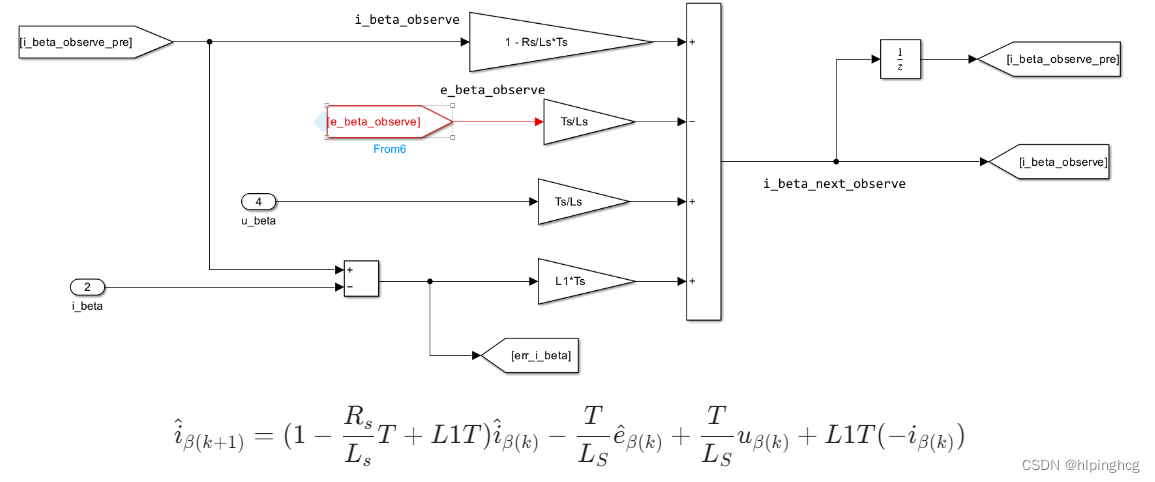
- 4.2.2 I_beta觀測
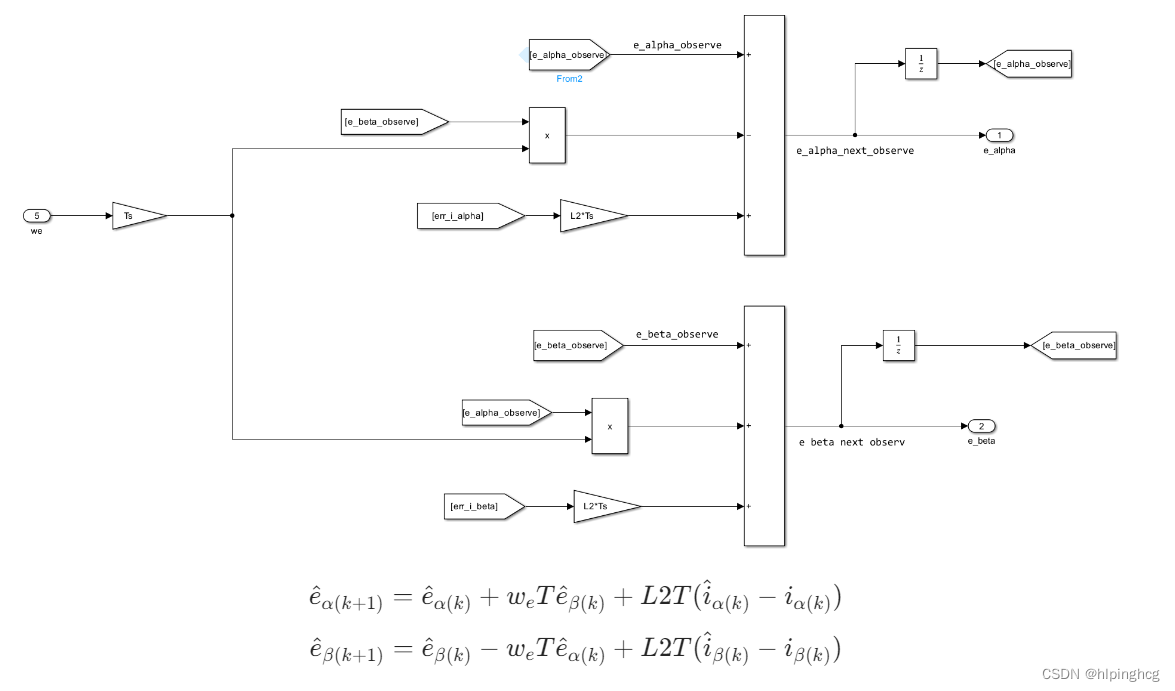
- 4.2.3 e_alpha、e_beta觀測
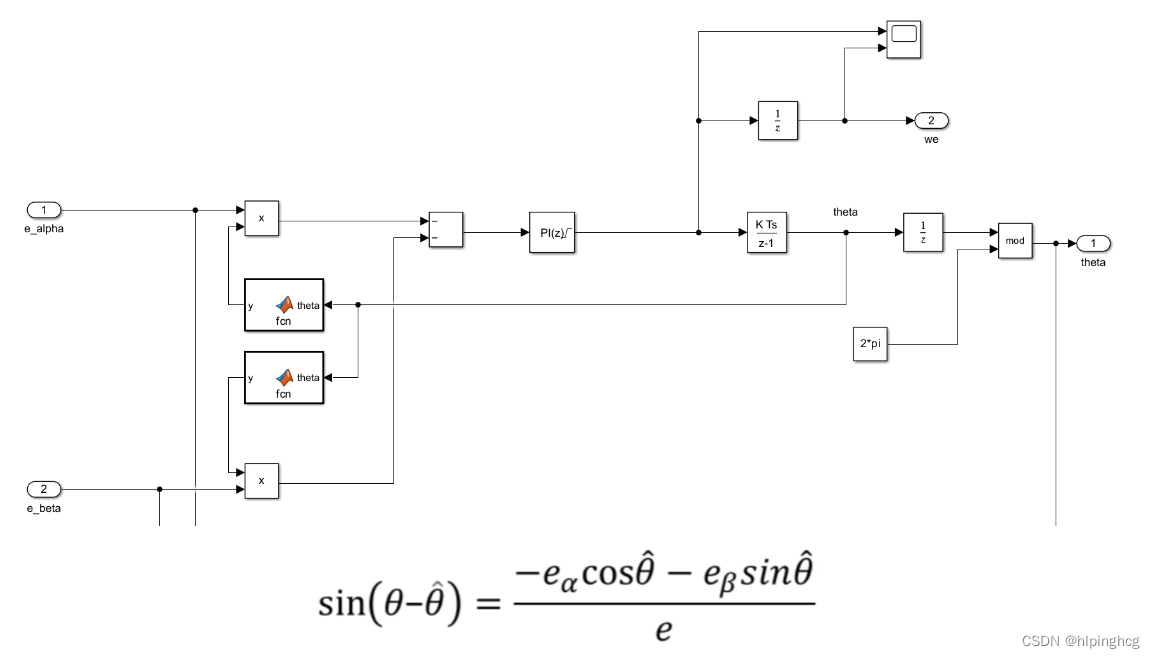
- 4.2.4 鎖相環
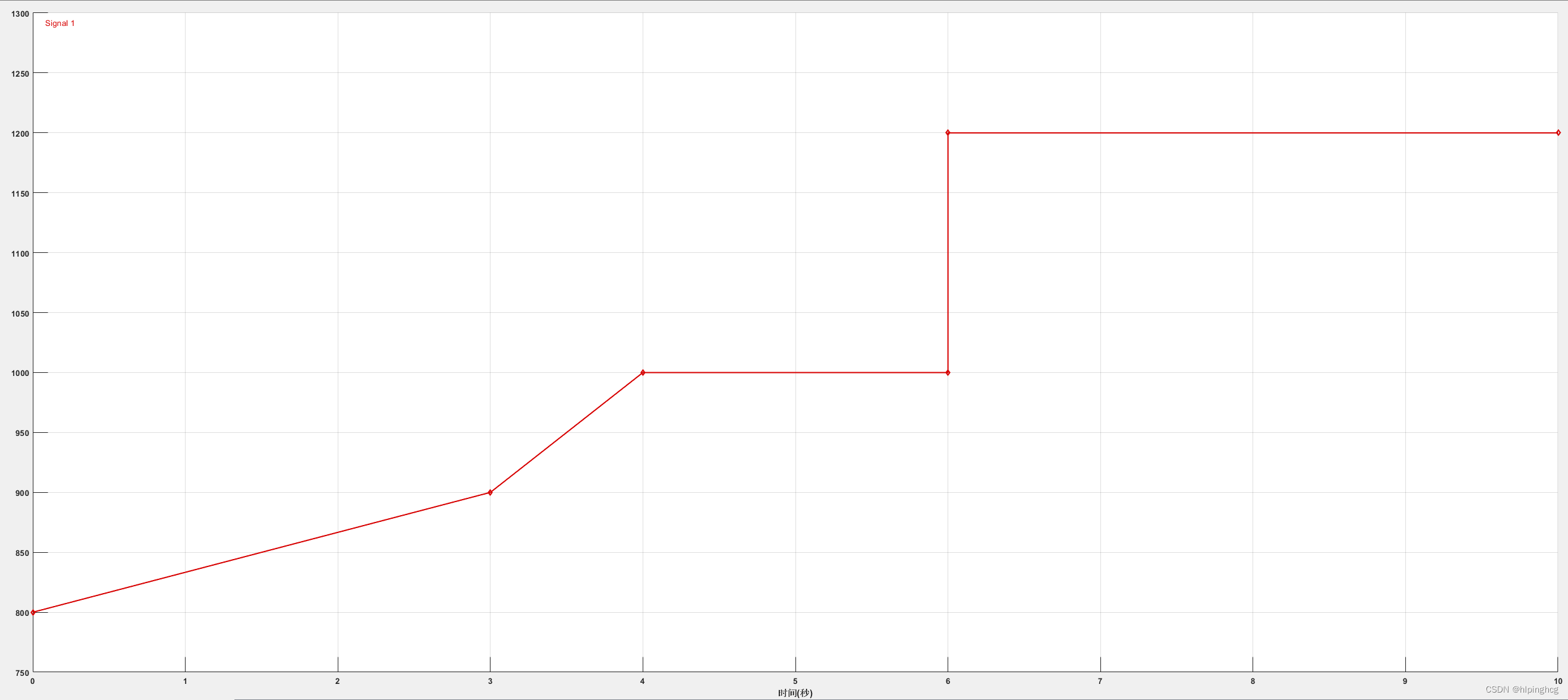
- 4.3 速度設定
- 4.4 速度觀測結果
- 4.5 電角度觀測結果
模型下載地址:無感FOC龍伯格觀測器+PLL仿真模型
1、觀測器的引入
2、β軸向下的電機觀測器數學模型
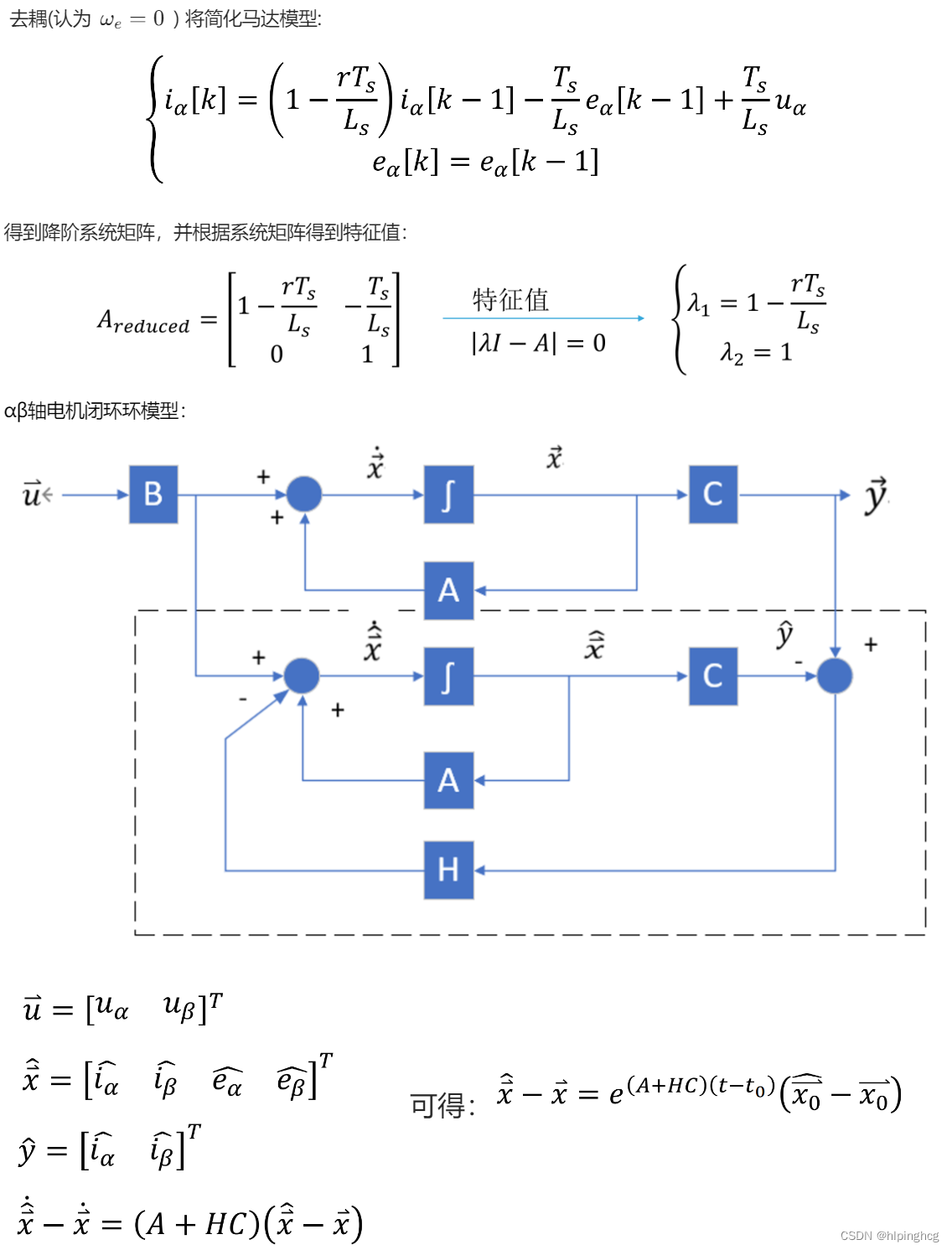
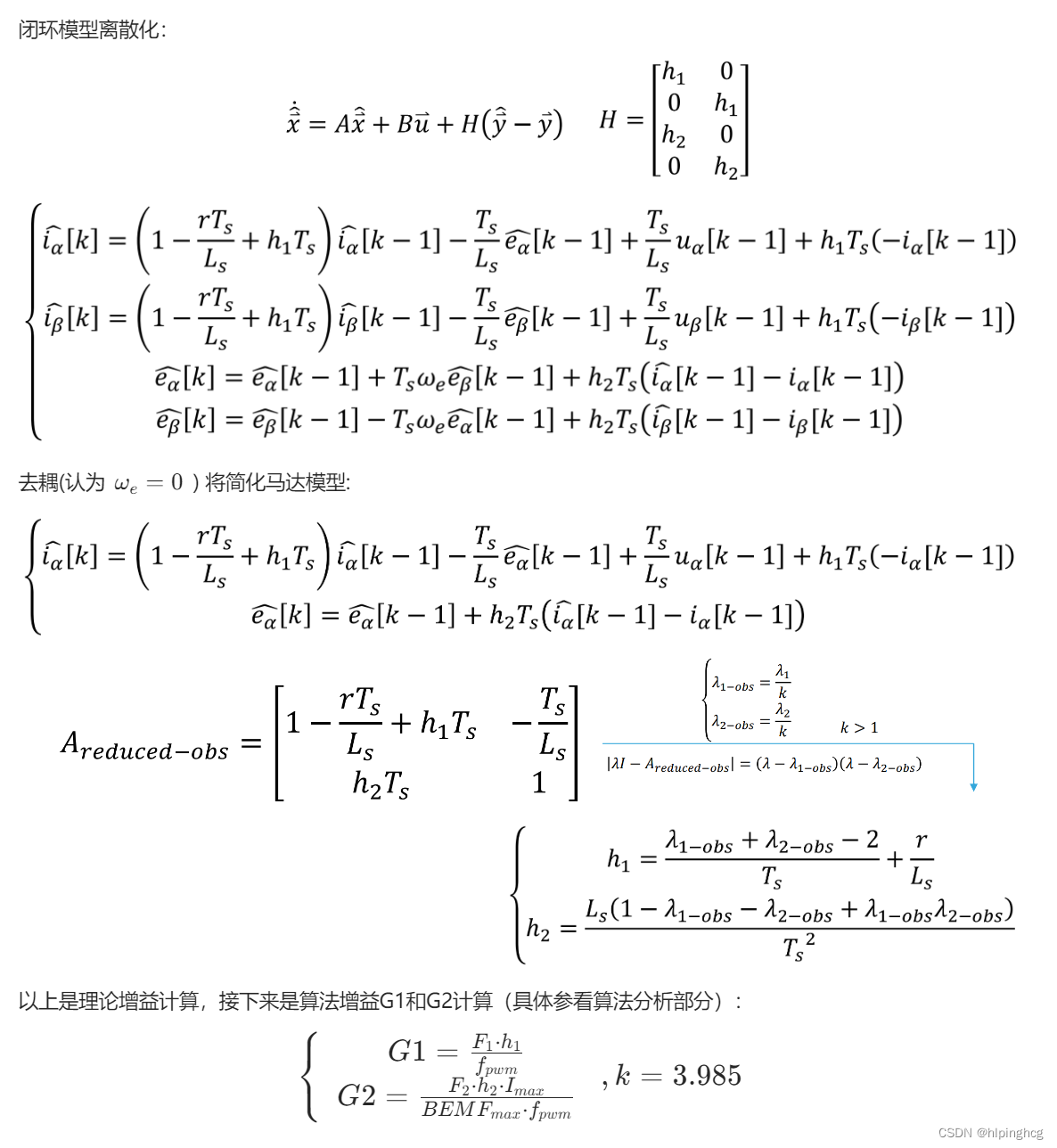
3、β軸向下的轉子點角度及速度觀測
4、Simulink仿真模型搭建
電機參數:
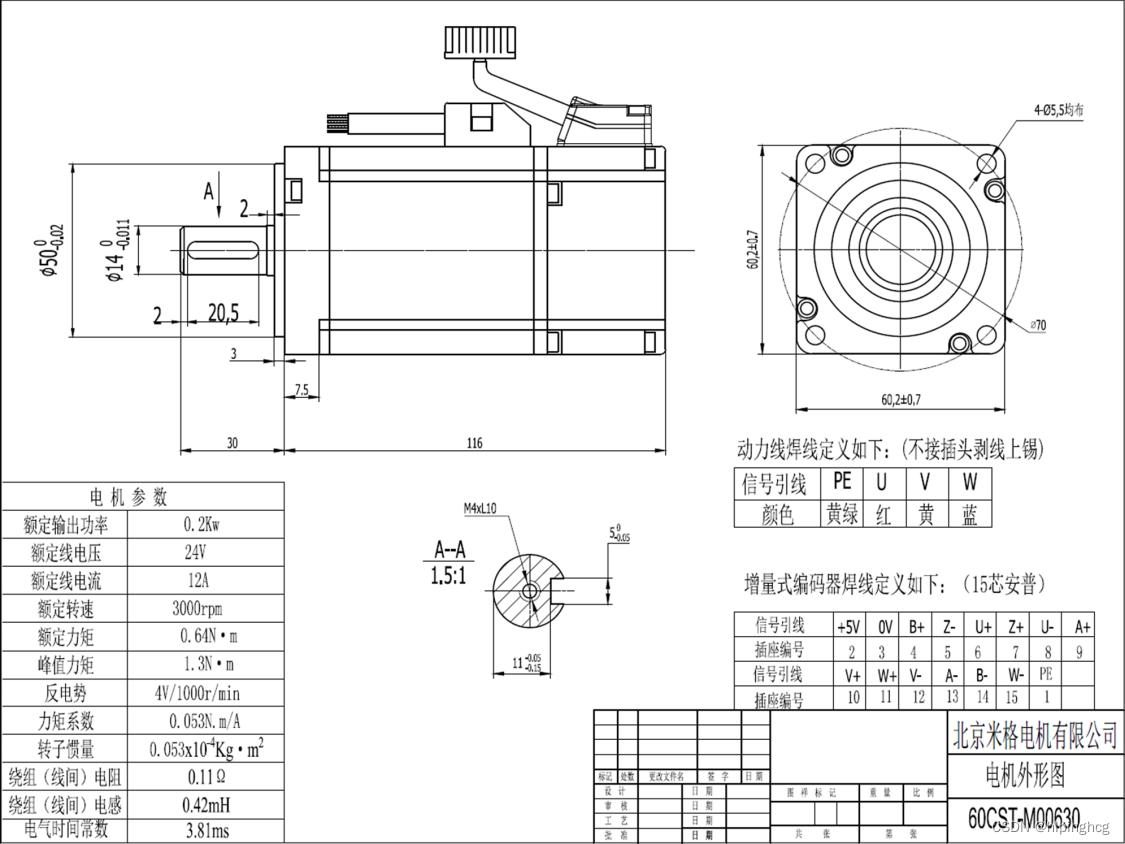
使用Permanent Magnet Synchronous Machine模塊參數初步計算:
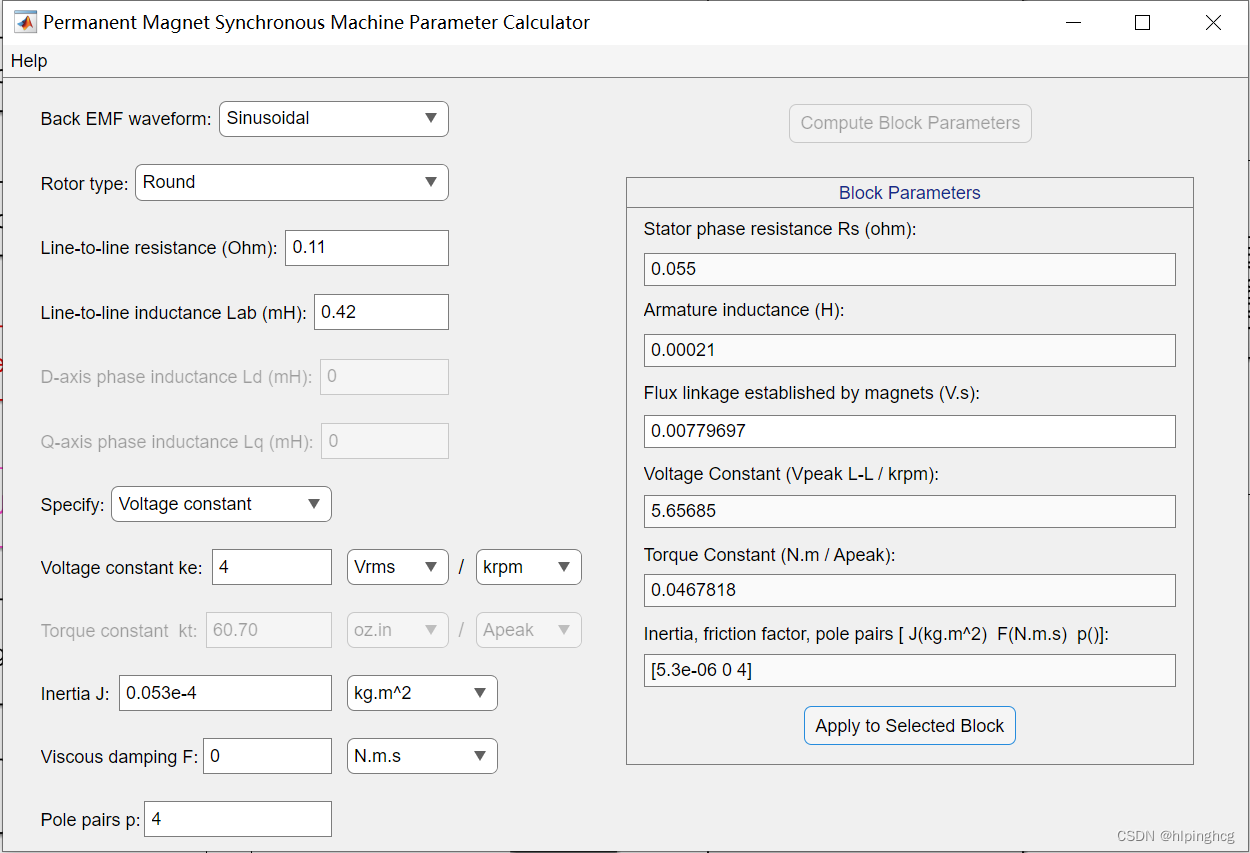
計算參數腳本:
function fcn()%4V/1000rpm
r=0.055;
Ls=0.00021;
Ts=0.0001;
Ke=4/1000;
pole=4;
J=0.053e-4;
max_speed=3000;%由反電動勢常數計算磁鏈
flux=10*sqrt(6)*Ke/(pi*pole);
% r : 歐姆
% LS:H%電流環PI計算
wc=2*pi*r/Ls;
kcp=wc*Ls;
kci=wc*r;%速度環PI計算
wn=wc/10;
kvp=wn*J/(1.5*pole*flux);
kvi=wn*kvp;%觀測器增益計算
l1=1-r*Ts/Ls;
l2=1;
%K>1
k=3.985;L1_obs=l1/k;
L2_obs=l2/k;h1=(L1_obs+L2_obs-2)/Ts+r/Ls;
h2=Ls*(1-L1_obs-L2_obs+L1_obs*L2_obs)/(Ts*Ts);%ST WB觀測器增益計算
max_current=3.268;
max_bemf_voltage=1.2*sqrt(2)*max_speed*Ke/sqrt(3);
F1=4096;
F2=16384;
G1=F1*h1*Ts;
G2=F2*h2*max_current*Ts/(max_bemf_voltage);%PLL增益計算
kpp=532*max_speed*pole/(1/Ts);
kpi=(1506742*max_speed*pole/((1/Ts)^2))/4;%求k
k1=-14785;
f=(2-r*Ts/Ls)/(k1*Ts-r*Ts/Ls+2);
str='f value is: ';
str=[str,num2str(f)];
disp(str);%數據打印
str='flux value is: ';
str=[str,num2str(flux)];
disp(str);str='wc value is: ';
str=[str,num2str(wc)];
disp(str);str='kcp value is: ';
str=[str,num2str(kcp)];
disp(str);str='kci value is: ';
str=[str,num2str(kci)];
disp(str);str='wn value is: ';
str=[str,num2str(wn)];
disp(str);str='kvp value is: ';
str=[str,num2str(kvp)];
disp(str);str='kvi value is: ';
str=[str,num2str(kvi)];
disp(str);str='h1 value is: ';
str=[str,num2str(h1)];
disp(str);str='h2 value is: ';
str=[str,num2str(h2)];
disp(str);str='G1 value is: ';
str=[str,num2str(G1)];
disp(str);str='G2 value is: ';
str=[str,num2str(G2)];
disp(str);str='kpp value is: ';
str=[str,num2str(kpp)];
disp(str);str='kpi value is: ';
str=[str,num2str(kpi)];
disp(str);
計算結果:
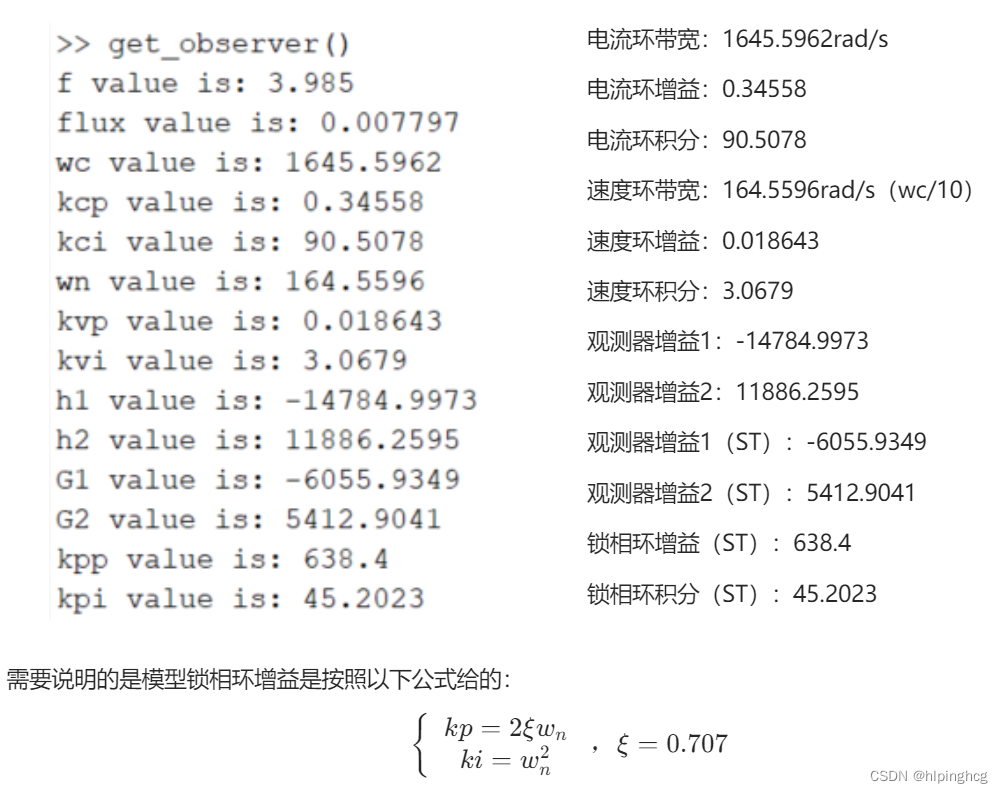
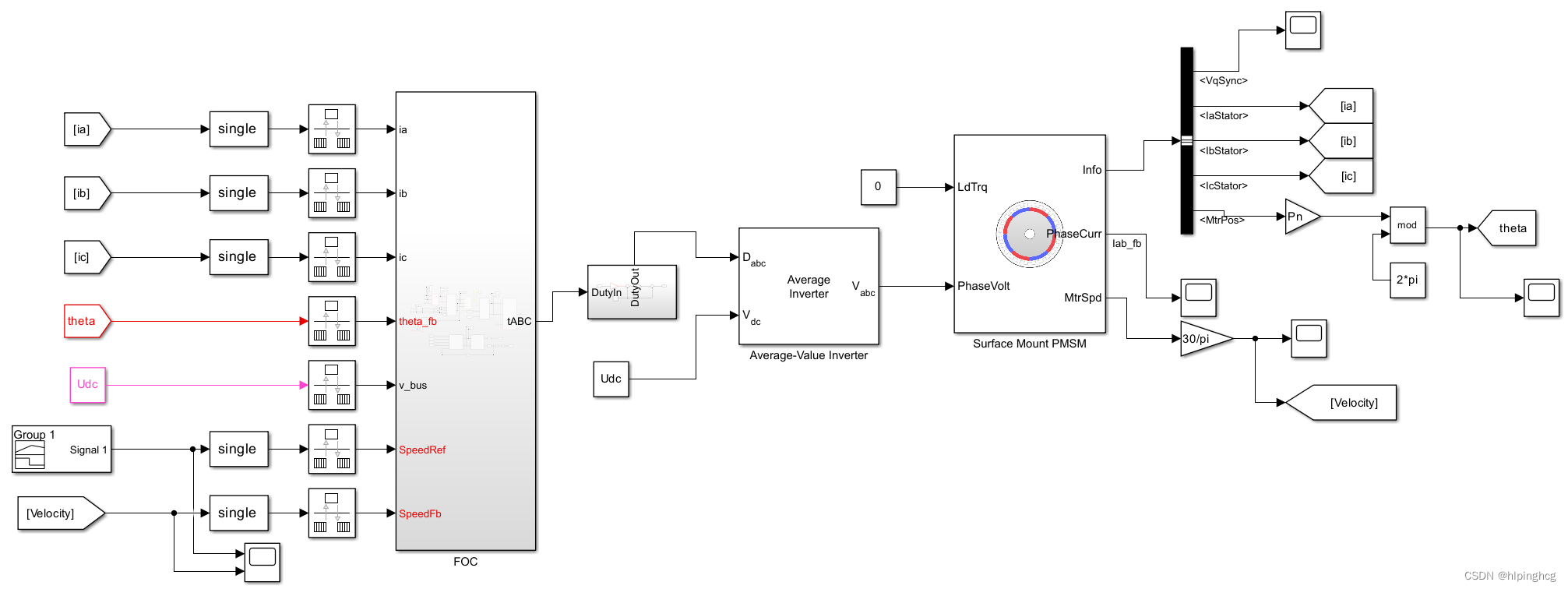
4.1模型總覽
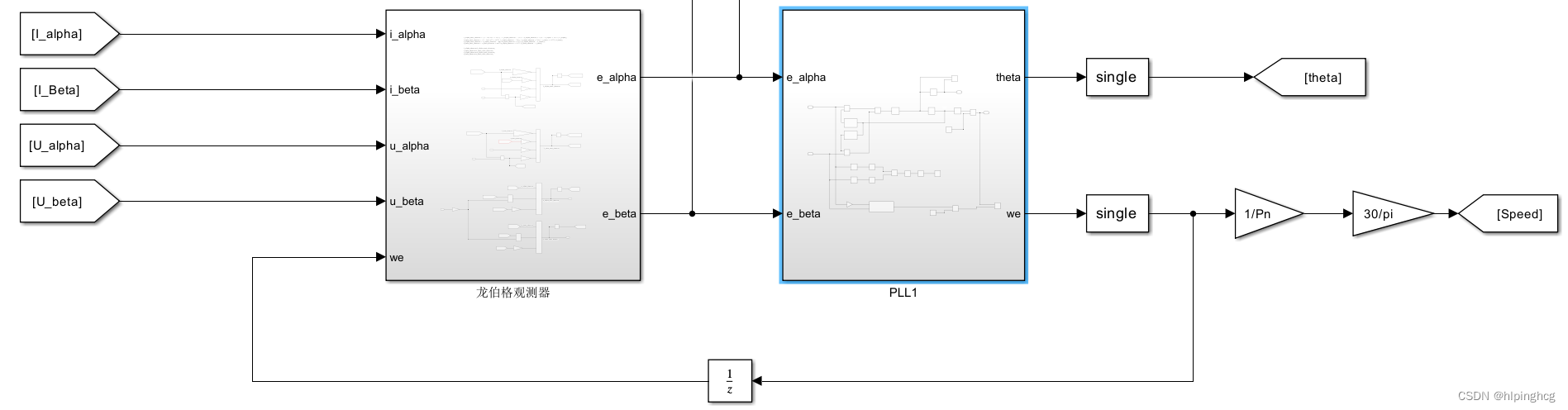
4.2 Luenberger觀測器模塊
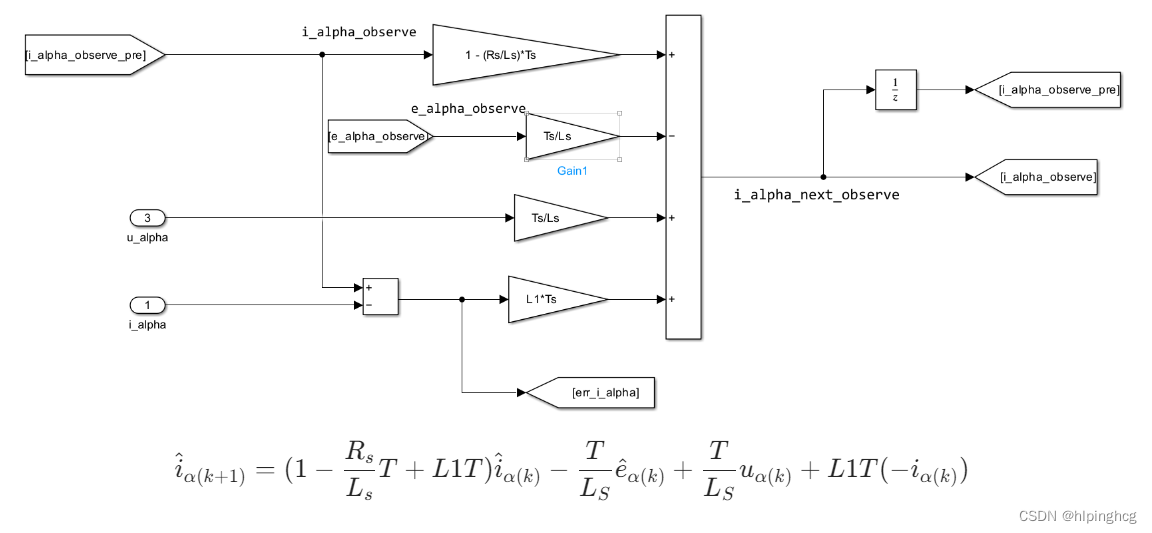
4.2.1 I_alpha觀測
4.2.2 I_beta觀測
4.2.3 e_alpha、e_beta觀測
4.2.4 鎖相環
4.3 速度設定
4.4 速度觀測結果
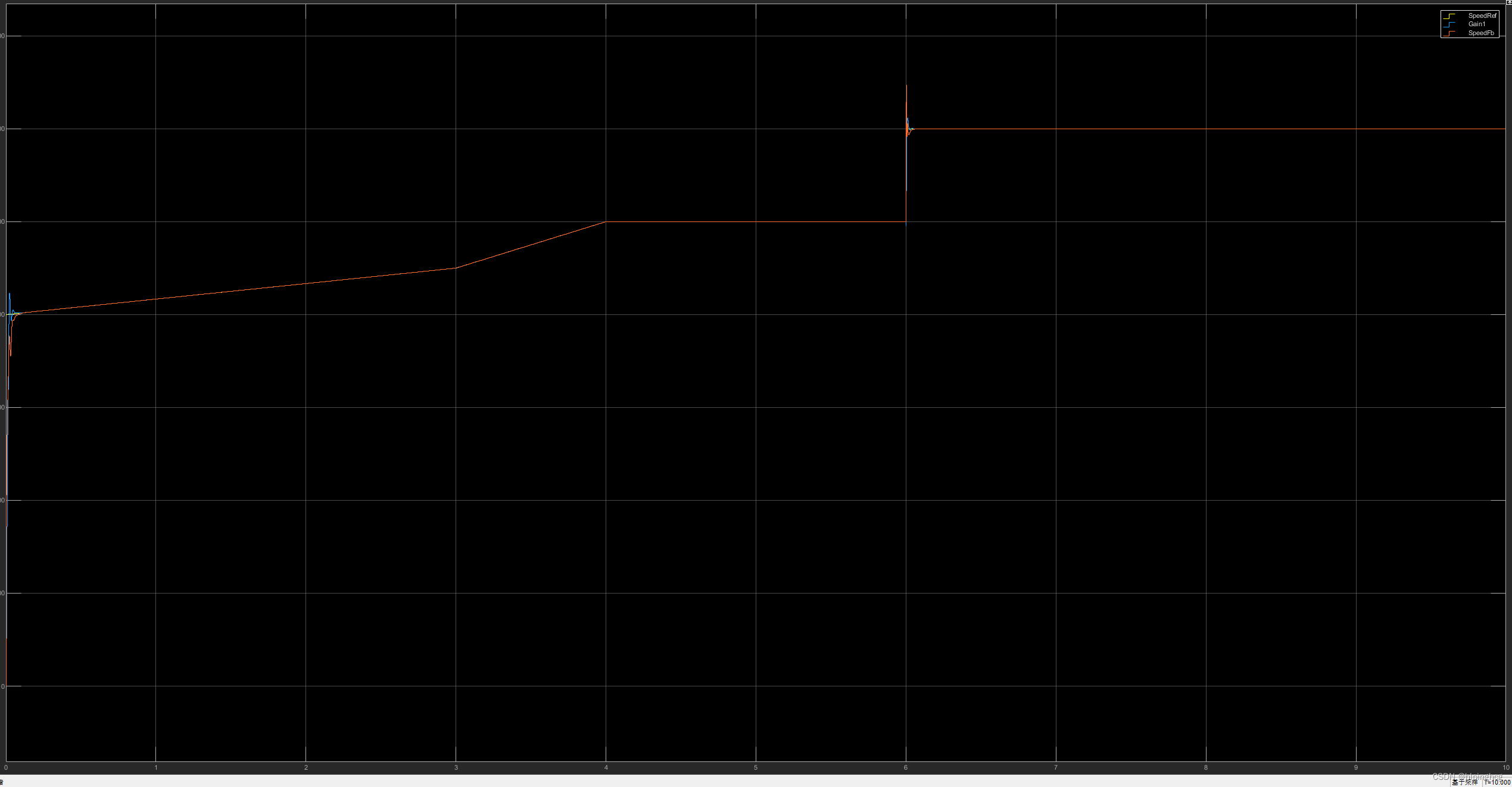
其中藍色部分為觀測速度,其基本和測量速度以及設定速度重合。
4.5 電角度觀測結果
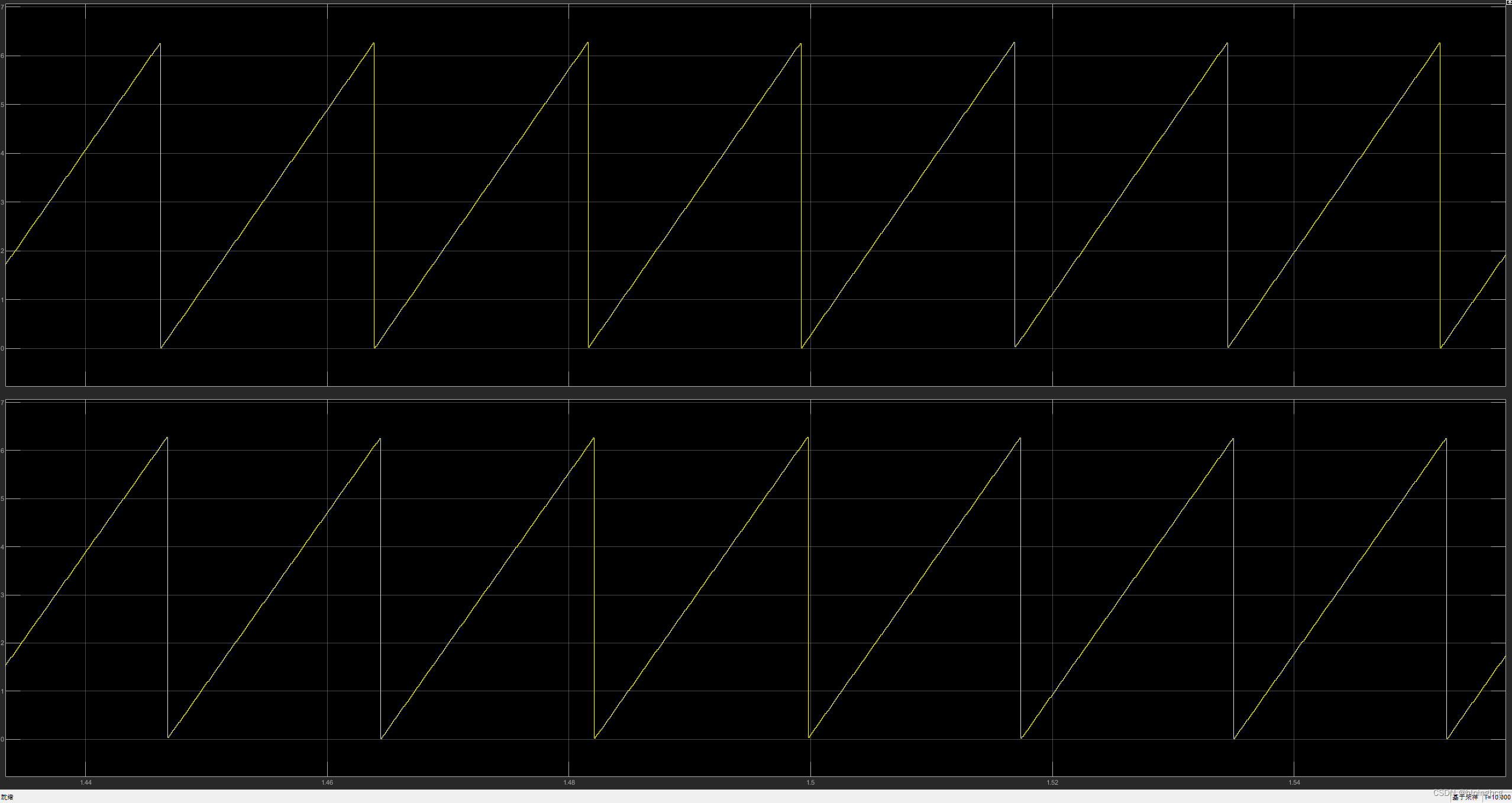
觀測角度和測量角度一致。

,abs() 函數 全面且詳細)



![[VNCTF2024]-PWN:preinit解析(逆向花指令,繞過strcmp,函數修改,機器碼)](http://pic.xiahunao.cn/[VNCTF2024]-PWN:preinit解析(逆向花指令,繞過strcmp,函數修改,機器碼))



——簡易聊天室案例)

)
)


)
![gcd+線性dp,[藍橋杯 2018 國 B] 矩陣求和](http://pic.xiahunao.cn/gcd+線性dp,[藍橋杯 2018 國 B] 矩陣求和)


