AVL樹的概念
二叉搜索樹雖可以縮短查找的效率,但如果數據有序或接近有序二叉搜索樹將退化為單支樹,查找元素相當于在順序表中搜索元素,效率低下。因此,兩位俄羅斯的數學家G.M.Adelson-Velskii和E.M.Landis在1962年
發明了一種解決上述問題的方法:當向二叉搜索樹中插入新結點后,如果保證每個結點的左右子樹高度之差的絕對值不超過1(需要對樹中的結點進行調整),即可降低樹的高度,從而減少平均搜索長度。
一棵AVL樹或者是空樹,或者是具有以下性質的二叉搜索樹:
它的左右子樹都是AVL樹
左右子樹高度之差(簡稱平衡因子)的絕對值不超過1(-1/0/1)
節點的平衡因子=右子樹的高度-左子樹的高度
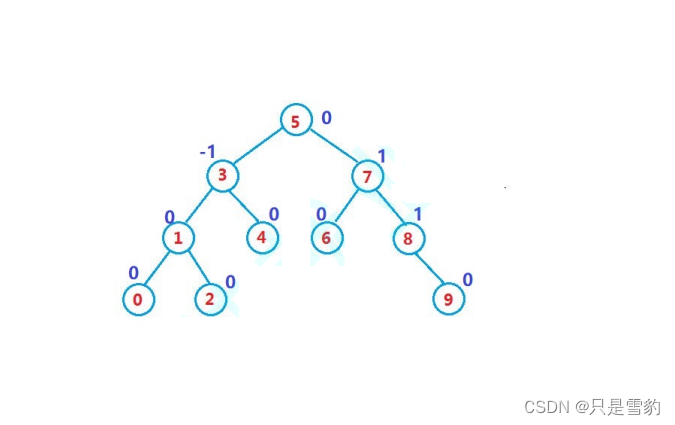
例如:
下圖的二叉搜索樹的每個節點的平衡因子的 絕對值都小于2,并且每個節點的子樹也都是AVL樹
AVL樹的定義
AVL樹是一種特殊的二叉搜索樹,它具有高度的平衡,所以為了在插入過程中的各個節點的平衡因子的更新,我們在定義AVL樹的節點結構的同時要帶上一個節點的雙親結點parent
template<class T>
struct AVLTreeNode
{AVLTreeNode(const T& data): _left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _bf(0){}AVLTreeNode<T>* _left; // 該節點的左孩子AVLTreeNode<T>* _right; // 該節點的右孩子AVLTreeNode<T>* _parent; // 該節點的雙親T _data;int _bf; // 該節點的平衡因子
};
AVL樹的插入
AVL樹的插入是一個難點,它分為好幾種情況,其實AVL樹的插入也就是在二叉搜索樹中插入新節點,但是由于他引入了平衡因子,需要更新,所以這里的插入節點就比較麻煩,她一共分為兩步:
1 插入節點
2 更新節點的平衡因子
為什么要更新節點的平衡因子呢?
簡單地舉個例子:
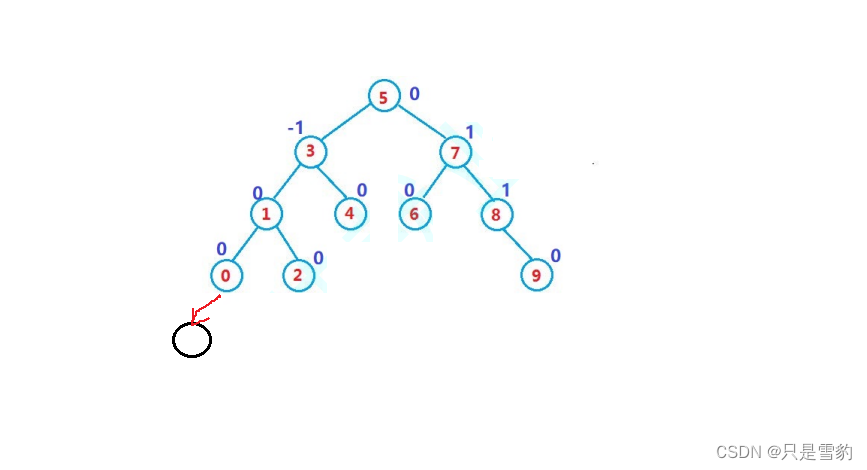
如圖所示,我將一個新節點插入0的左孩子節點的位置,那么以3為節點的這顆子樹的高度差不就會超過1了嗎,他的左子樹的高度插入新節點后為3,而右子樹為1,這就不符合AVL樹的性質了,所以我們需要經過一些操作來更新平衡因子
這里大家需要注意一個規則:
新節點如果是插入后他的parent的左側,那么他的平衡因子默認是+1
反之插入他的右側就是默認-1
那么在插入節點后,各個插入節點的parent一共就有三種情況了:
平衡因子為0
如果parent的平衡因子為0,說明插入之前parent的平衡因子為正負1,插入后被調整成0,此時滿足AVL樹的性質,插入成功
平衡因子為正負1
如果parent的平衡因子為正負1,說明插入前pParent的平衡因子一定為0,插入后被更新成正負1,此時以parent為根的樹的高度增加,需要繼續向上更新,防止部分節點的左右子樹高度差超過1
平衡因子為正負2
如果parent的平衡因子為正負2,則pParent的平衡因子違反平衡樹的性質,需要對其進行旋轉處理,旋轉處理之后插入成功
至于旋轉的情況我們待會分析,我們先將插入節點的代碼的主要框架構造出來:
這樣一個簡單的框架就構造出來了
template<class T>
struct AVLTreeNode
{AVLTreeNode<T>* _left; // 該節點的左孩子AVLTreeNode<T>* _right; // 該節點的右孩子AVLTreeNode<T>* _parent; // 該節點的雙親T _data;int _bf; // 該節點的平衡因子AVLTreeNode(const T& data): _left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _bf(0){}
};
template<class T>
class AVLTree
{typedef AVLTreeNode<T> Node;
public:bool insert(const T& data){if (_root == nullptr){_root = new Node(data);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_data < data){parent = cur;cur = cur->_right;}else if (cur->_data > data){parent = cur;cur = cur->_left;}else{return false;}cur = new Node(data);if (parent->_data > data){parent->_left = cur;}else{parent->_right = cur;}while (parent){//左邊++if (cur == parent->_left){parent->_bf--;}//右邊--else{parent->_bf++;}//parent的平衡因子等于0,插入成功if (parent->_bf == 0){break;}//parent的平衡因子等于1或者-1,繼續向上更新else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//需要進行旋轉}else{assert(false);}}}}private:Node* _root;
};
下面我們就具體分析幾種旋轉的情況
AVL樹的旋轉
如果在一棵原本是平衡的AVL樹中插入一個新節點,可能造成不平衡,此時必須調整樹的結構,使之平衡化。根據節點插入位置的不同,AVL樹的旋轉分為四種:
1. 新節點插入較高左子樹的左側—左左:右單旋
下圖中的h可以時0 1 2三種,分別代表了這三個子樹的高度,無論他是等于0 1 還是2時他們都可以滿足AVL樹的要求
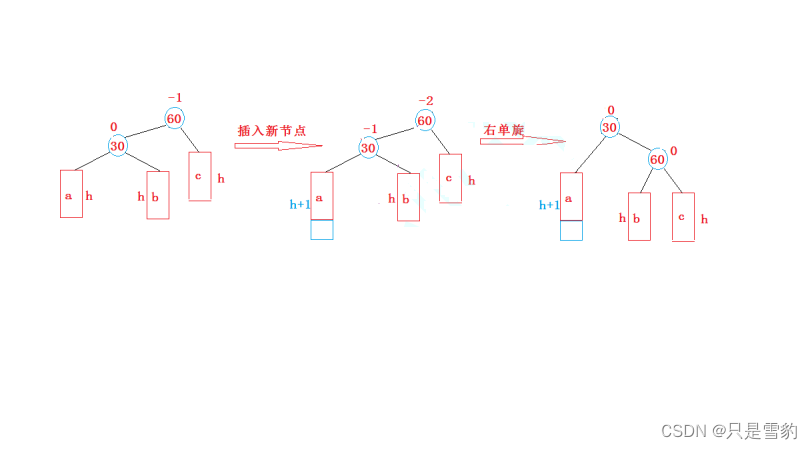
可以看到,這種情況就是parent的平衡因子等于-2,cur的平衡因子等于-1
左旋函數如下:
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;//防止sublr為空if(subLR)subLR->_parent = parent;//記錄祖父位置Node* pparent = parent->_parent;subL->_right = parent;parent->_parent = subL;//如果父親是根節點if (parent == _root){_root = subL;subL->_parent = nullptr;}//parent不是根節點,那么祖父就會成為subl的parentelse{if (pparent->_left == parent){pparent->_left = subL;subL->_parent = pparent;}else{pparent->_right = subL;subL->_parent = pparent;}}//旋轉后parent和subl的 平衡因子都會更新為0parent->_bf = subL->_bf = 0;
}
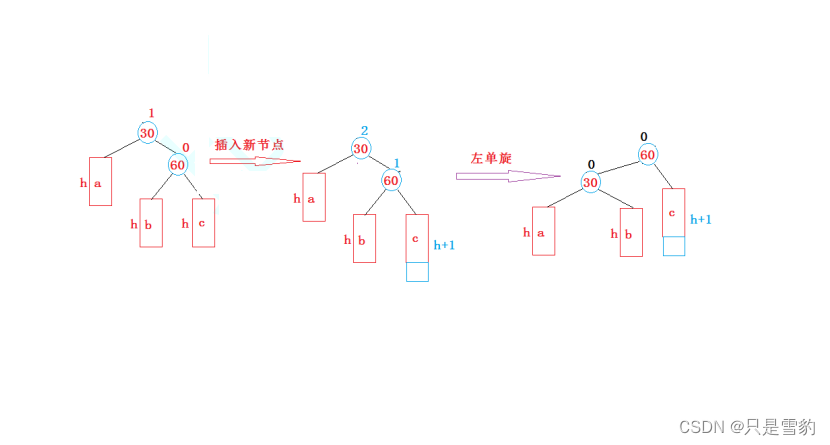
2. 新節點插入較高右子樹的右側—右右:左單旋
實現及情況考慮可參考右單旋。
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* pparent = parent->_parent;if (subRL)subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent == nullptr;}else{if (pparent->_left == parent){pparent->_left = subR;subR->_parent = pparent;}else{pparent->_right = subR;subR->_parent = pparent;}}parent->_bf = subR->_bf = 0;
}
3. 新節點插入較高左子樹的右側—左右:先左單旋再右單旋
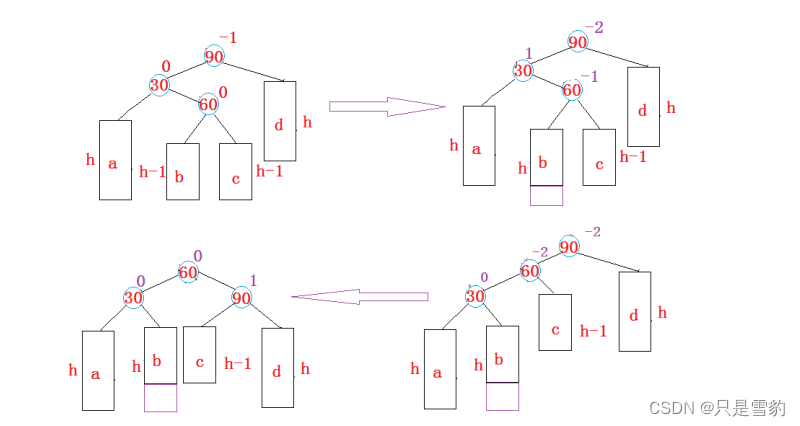
將雙旋變成單旋后再旋轉,即:先對30進行左單旋,然后再對90進行右單旋,旋轉完成后再考慮平衡因子的更新。
直接復用即可:
由于博主能力有限,所以放入代碼大家仔細理解
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;RotateL(parent->_left);RotateR(parent);int bf = subLR->_bf;//sublr就是新增節點if (bf == 0){parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}//sublr左子樹新增節點else if (bf == -1){parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}//sublr右子樹新增節點else if (bf == 1){parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else{assert(false);}
}
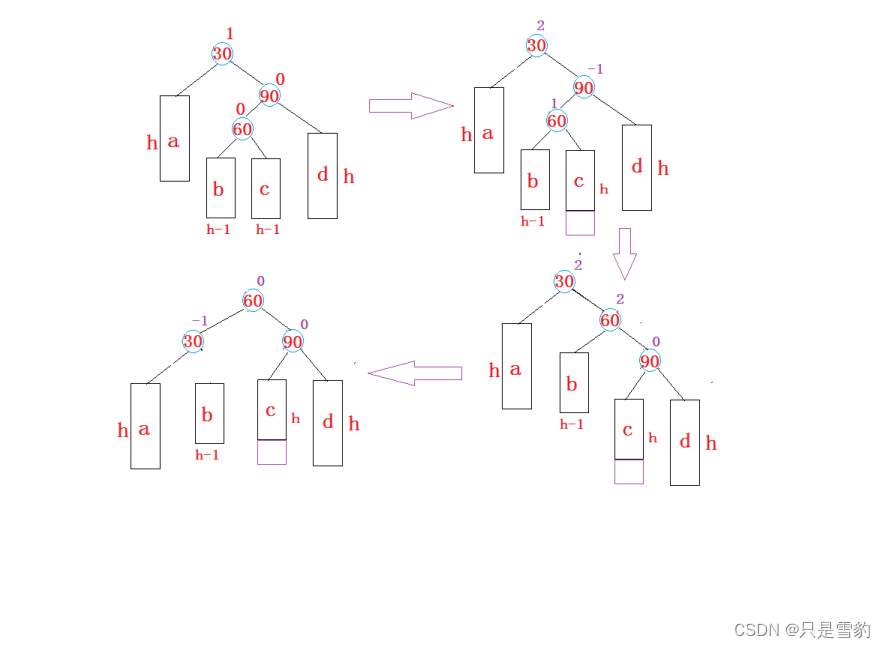
4. 新節點插入較高右子樹的左側—右左:先右單旋再左單旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);//subrl這個點為新增點if (bf == 0){parent->_bf = subR->_bf = subRL->_bf = 0;}//subrl的左子樹新增else if (bf == -1){parent->_bf = 0;subRL->_bf = 0;subR->_bf = 1;}//subrl的右子樹新增else if (bf == 1){parent->_bf = -1;subRL->_bf = 0;subR->_bf = 0;}else{assert(false);}
}
根據各種情況我們做了總結:
假如以parent為根的子樹不平衡,即parent的平衡因子為2或者-2,分以下情況考慮
- parent的平衡因子為2,說明parent的右子樹高,設parent的右子樹的根為subR,當subR的平衡因子為1時,執行左單旋當subR的平衡因子為-1時,執行右左雙旋
- parent的平衡因子為-2,說明parent的左子樹高,設parent的左子樹的根為subL,當subL的平衡因子為-1是,執行右單旋,當subL的平衡因子為1時,執行左右雙旋旋轉完成后,原parent為根的子樹個高度降低,已經平衡,不需要再向上更新。
所以我們可以補全上面的插入節點的代碼了:
bool insert(const T& data)
{if (_root == nullptr){_root = new Node(data);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_data < data){parent = cur;cur = cur->_right;}else if (cur->_data > data){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(data);if (parent->_data > data){parent->_left = cur;}else{parent->_right = cur;}while (parent){//左邊++if (cur == parent->_left){parent->_bf--;}//右邊--else{parent->_bf++;}//parent的平衡因子等于0,插入成功if (parent->_bf == 0){break;}//parent的平衡因子等于1或者-1,繼續向上更新else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//需要進行旋轉if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}break;}else{assert(false);}}return true;
}
AVL樹的驗證
AVL樹是在二叉搜索樹的基礎上加入了平衡性的限制,因此要驗證AVL樹,可以分兩步:
1. 驗證其為二叉搜索樹
如果中序遍歷可得到一個有序的序列,就說明為二叉搜索樹
2. 驗證其為平衡樹每個節點子樹高度差的絕對值不超過1(注意節點中如果沒有平衡因子)節點的平衡因子是否計算正確
我們可以用一個函數來判斷即可:
首先要有一個計算樹的高度的函數
然后判斷他們的子樹的高度差的絕對值是否在2以內,并且他們的子樹也要是AVL樹
int Height(Node* root)
{if (root == nullptr){return 0;}int leftheight = Height(root->_left);int rightheight = Height(root->_right);return leftheight > rightheight ? leftheight + 1 : rightheight + 1;
}bool isbalance()
{return _isbalance(_root);
}bool _isbalance(Node* root)
{if (root == nullptr)return true;int leftheight = Height(root->_left);int rightheight = Height(root->_right);if (rightheight - leftheight != root->_bf){cout << root->_data << "平衡因子異常" << endl;return false;}return abs(rightheight - leftheight) < 2&& _isbalance(root->_left)&& _isbalance(root->_right);
}
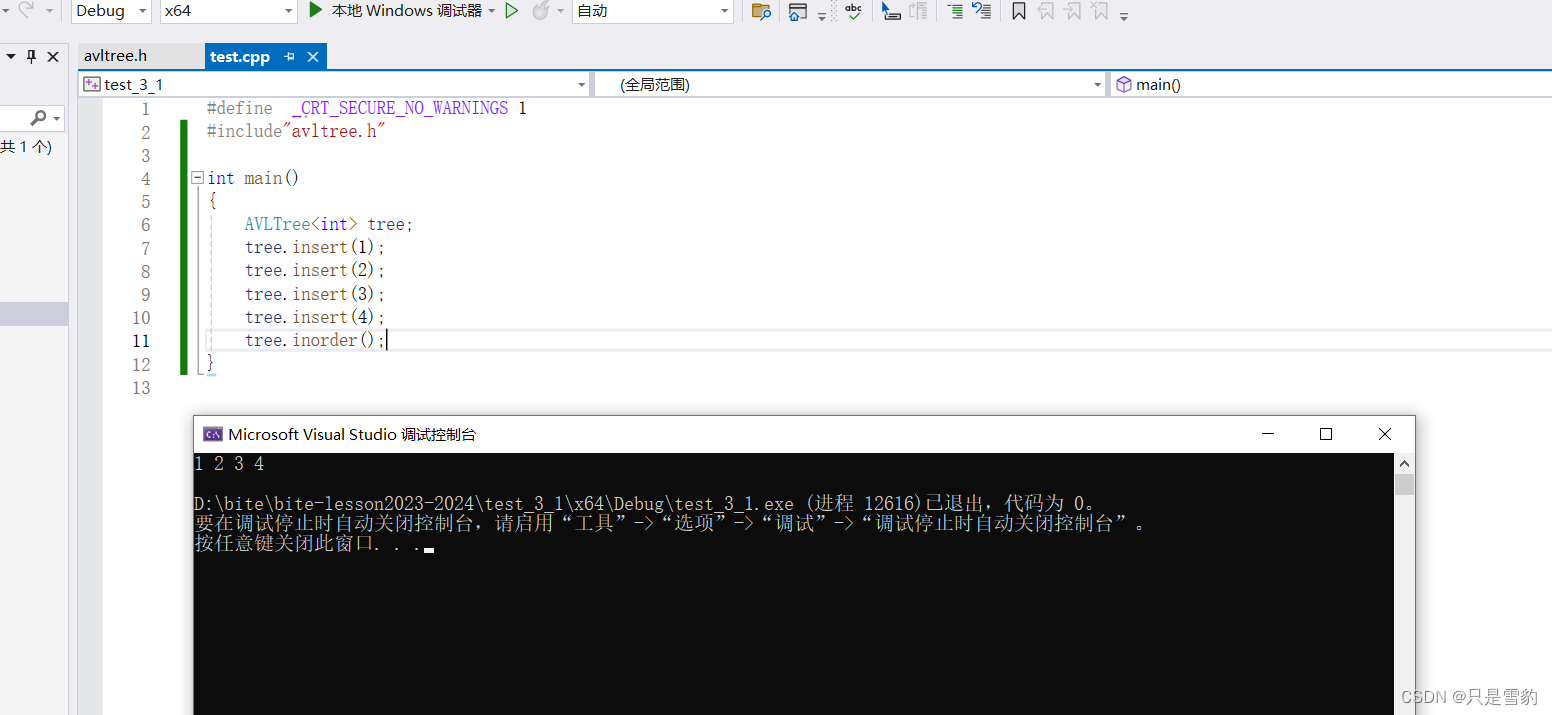
我們還可以用中序遍歷打印:
void inorder()
{_inorder(_root);cout << endl;
}void _inorder(Node* root)
{if (root == nullptr){return;}_inorder(root->_left);cout << root->_data << " ";_inorder(root->_right);
}
完整代碼如下:
#include<iostream>
#include<assert.h>
using namespace std;
template<class T>
struct AVLTreeNode
{AVLTreeNode<T>* _left; // 該節點的左孩子AVLTreeNode<T>* _right; // 該節點的右孩子AVLTreeNode<T>* _parent; // 該節點的雙親T _data;int _bf; // 該節點的平衡因子AVLTreeNode(const T& data): _left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _bf(0){}
};
template<class T>
class AVLTree
{typedef AVLTreeNode<T> Node;
public:bool insert(const T& data){if (_root == nullptr){_root = new Node(data);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_data < data){parent = cur;cur = cur->_right;}else if (cur->_data > data){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(data);if (parent->_data > data){parent->_left = cur;}else{parent->_right = cur;}while (parent){//左邊++if (cur == parent->_left){parent->_bf--;}//右邊--else{parent->_bf++;}//parent的平衡因子等于0,插入成功if (parent->_bf == 0){break;}//parent的平衡因子等于1或者-1,繼續向上更新else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//需要進行旋轉if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}break;}else{assert(false);}}return true;}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;//防止sublr為空if(subLR)subLR->_parent = parent;//記錄祖父位置Node* pparent = parent->_parent;subL->_right = parent;parent->_parent = subL;//如果父親是根節點if (parent == _root){_root = subL;subL->_parent = nullptr;}//parent不是根節點,那么祖父就會成為subl的parentelse{if (pparent->_left == parent){pparent->_left = subL;subL->_parent = pparent;}else{pparent->_right = subL;subL->_parent = pparent;}}//旋轉后parent和subl的 平衡因子都會更新為0parent->_bf = subL->_bf = 0;}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* pparent = parent->_parent;if (subRL)subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent == nullptr;}else{if (pparent->_left == parent){pparent->_left = subR;subR->_parent = pparent;}else{pparent->_right = subR;subR->_parent = pparent;}}parent->_bf = subR->_bf = 0;}void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;RotateL(parent->_left);RotateR(parent);int bf = subLR->_bf;//sublr就是新增節點if (bf == 0){parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}//sublr左子樹新增節點else if (bf == -1){parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}//sublr右子樹新增節點else if (bf == 1){parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else{assert(false);}}void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);//subrl這個點為新增點if (bf == 0){parent->_bf = subR->_bf = subRL->_bf = 0;}//subrl的左子樹新增else if (bf == -1){parent->_bf = 0;subRL->_bf = 0;subR->_bf = 1;}//subrl的右子樹新增else if (bf == 1){parent->_bf = -1;subRL->_bf = 0;subR->_bf = 0;}else{assert(false);}}int Height(Node* root){if (root == nullptr){return 0;}int leftheight = Height(root->_left);int rightheight = Height(root->_right);return leftheight > rightheight ? leftheight + 1 : rightheight + 1;}bool isbalance(){return _isbalance(_root);}bool _isbalance(Node* root){if (root == nullptr)return true;int leftheight = Height(root->_left);int rightheight = Height(root->_right);if (rightheight - leftheight != root->_bf){cout << root->_data << "平衡因子異常" << endl;return false;}return abs(rightheight - leftheight) < 2&& _isbalance(root->_left)&& _isbalance(root->_right);}void inorder(){_inorder(_root);cout << endl;}void _inorder(Node* root){if (root == nullptr){return;}_inorder(root->_left);cout << root->_data << " ";_inorder(root->_right);}private:Node* _root=nullptr;
};好了,今天的分享到這里就結束了,感謝大家的支持!




【數據持久化(用戶首選項、關系型數據庫)、通知(基礎通知、進度條通知、通知意圖)】)






Windows系統---保姆級教程)

)




)
