文章目錄
- 1.ROS2的系統架構
- 2.ROS2的編碼風格
- 3.細談初始化和資源釋放
- 4.細談配置文件
- 5.ROS2的一些命令
- 6.ROS2的核心模塊
- 6.1 通信模塊
- 6.2 功能包
- 6.3 分布式
- 6.4 終端命令和rqt
- 6.5 launch
- 6.6 TF坐標變換
- 6.7 可視化RVIZ
1.ROS2的系統架構
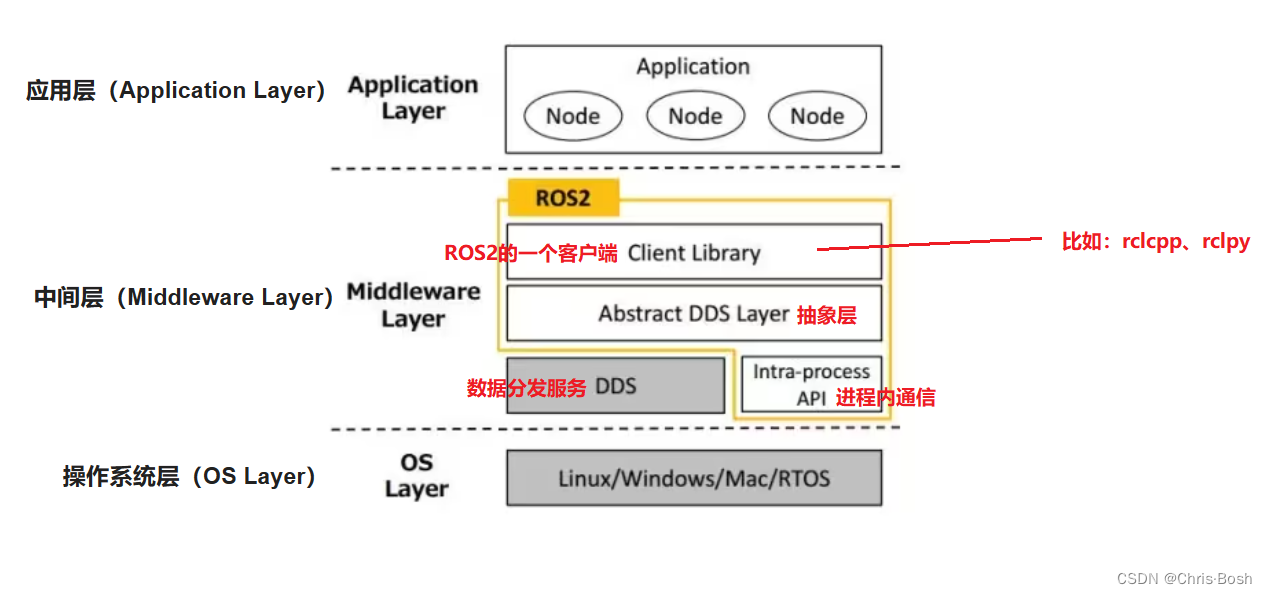
開發者的工作內容一般都在應用層,開發人員需要通過實現具有某一特定功能的功能包來構建機器人應用程序。
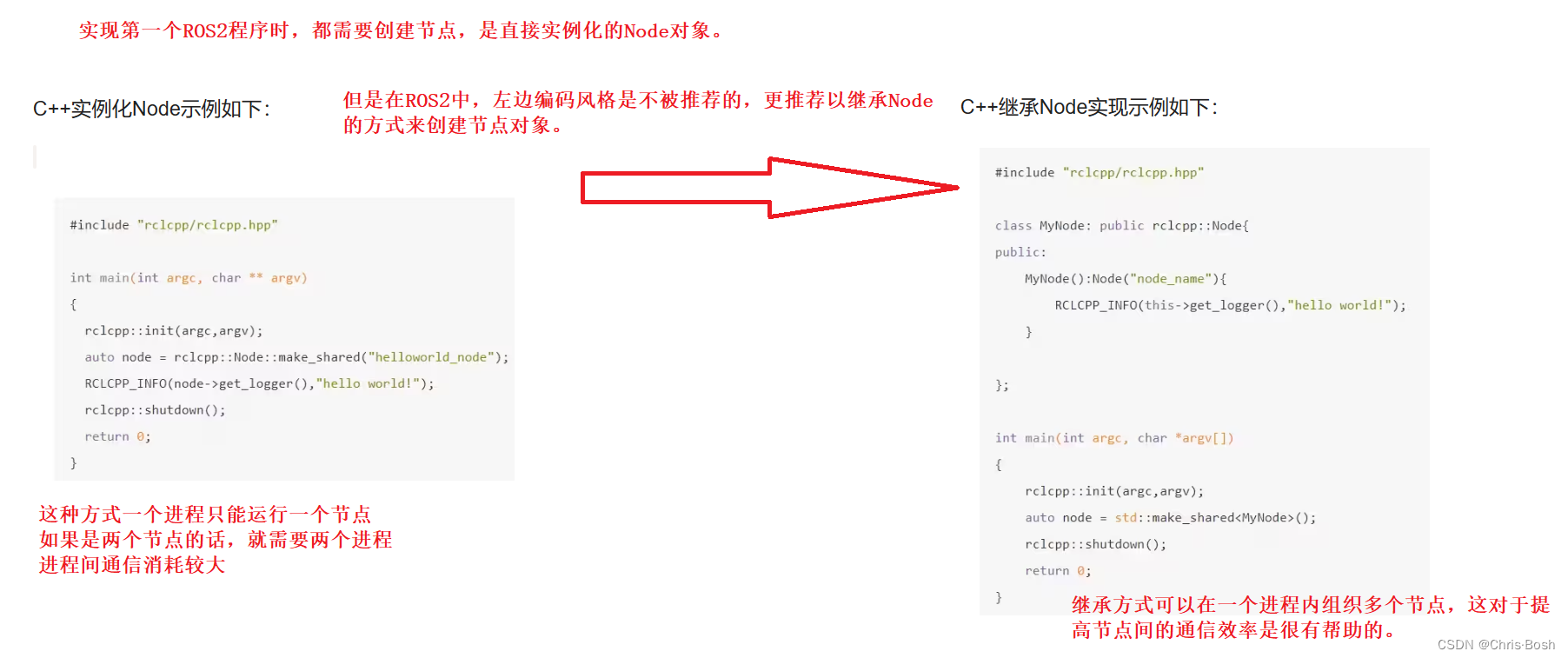
2.ROS2的編碼風格
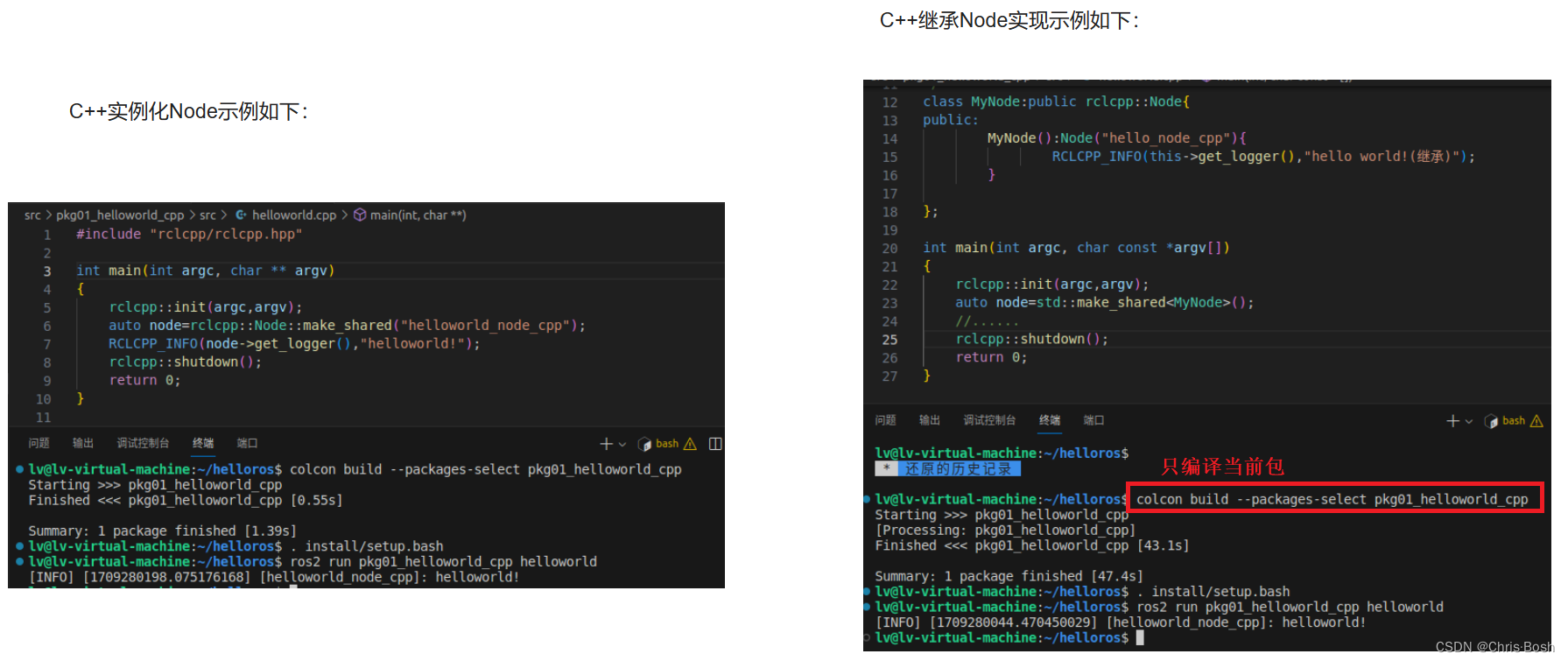
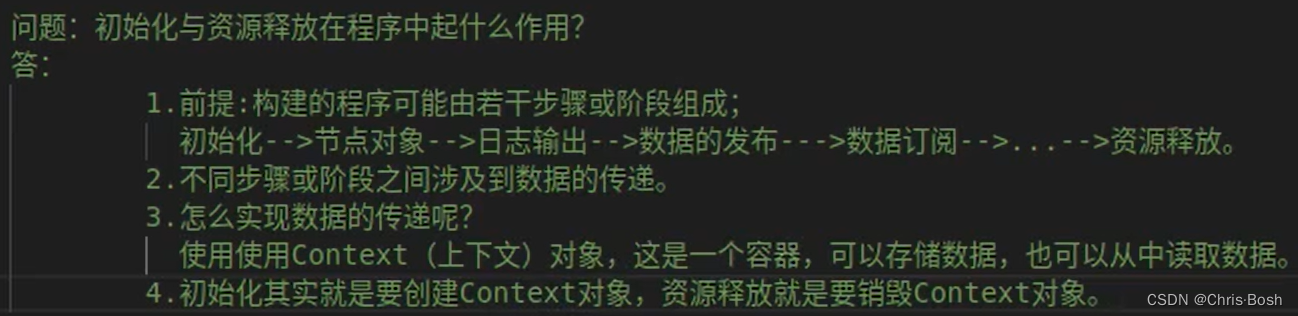
3.細談初始化和資源釋放
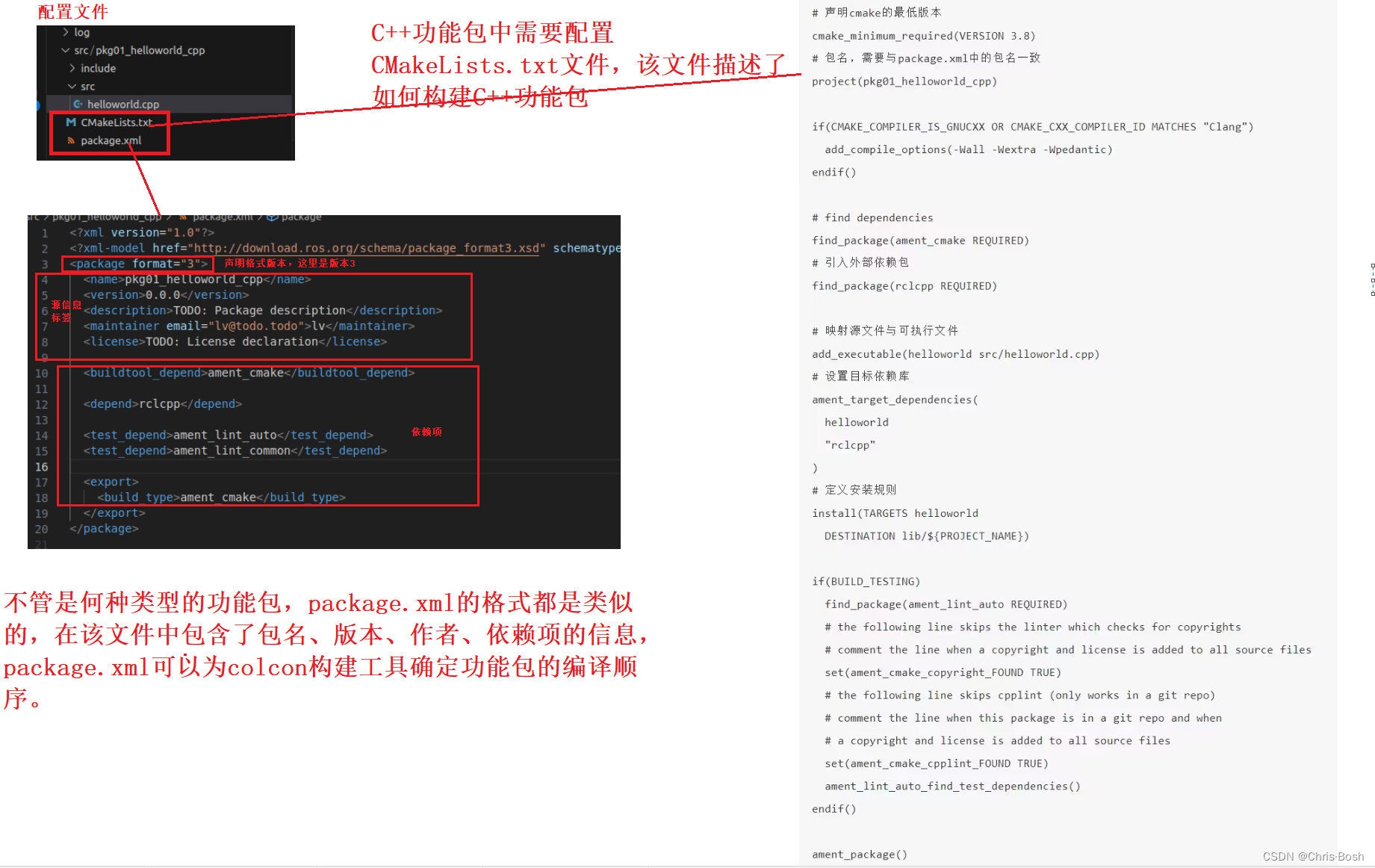
4.細談配置文件
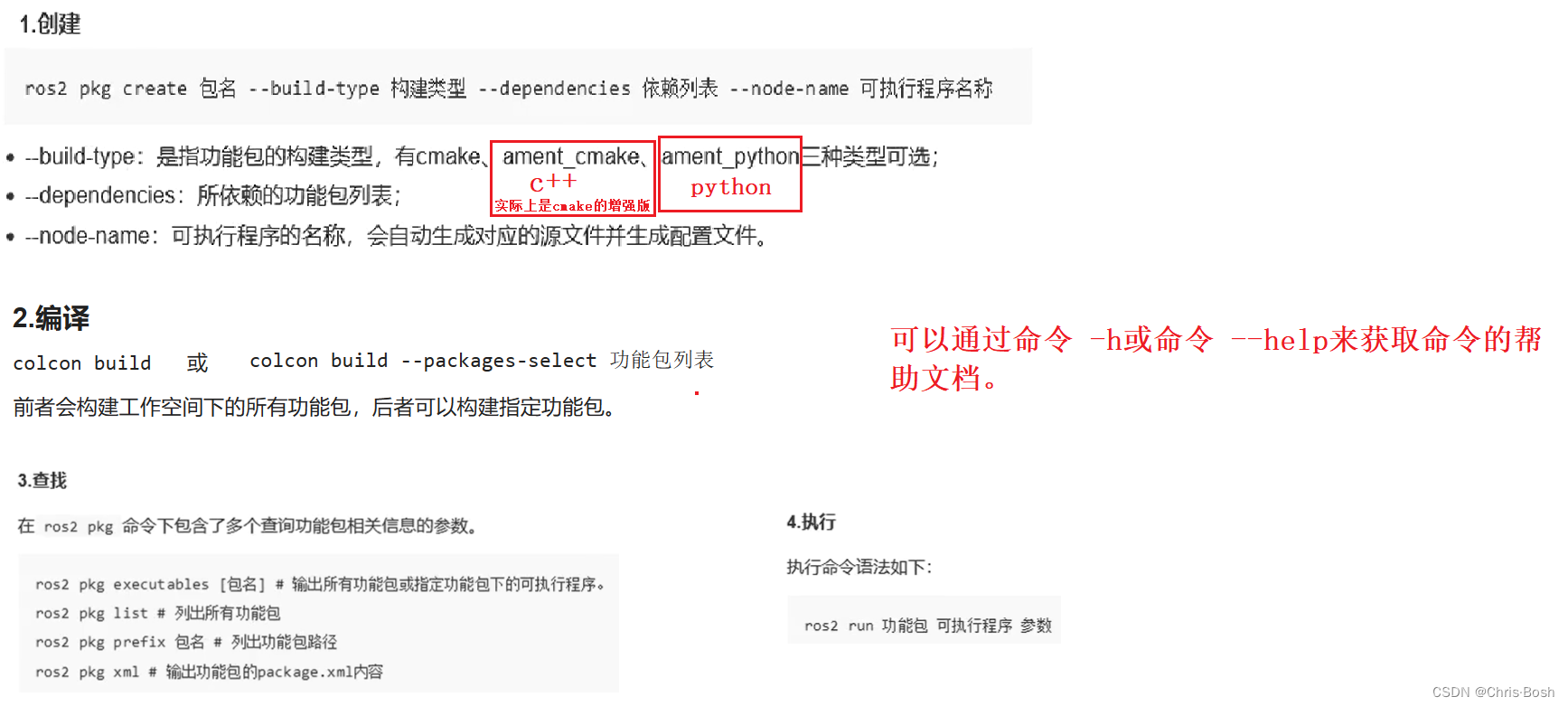
5.ROS2的一些命令
6.ROS2的核心模塊
6.1 通信模塊
ROS2中是如何控制機器人底盤運動的 ?
雷達、攝像頭這些傳感器是如何傳輸到ROS2上的?
導航、機械臂等系統性實現不同模塊之間是如何交互數據的?
這些都是屬于通信模塊的內容!
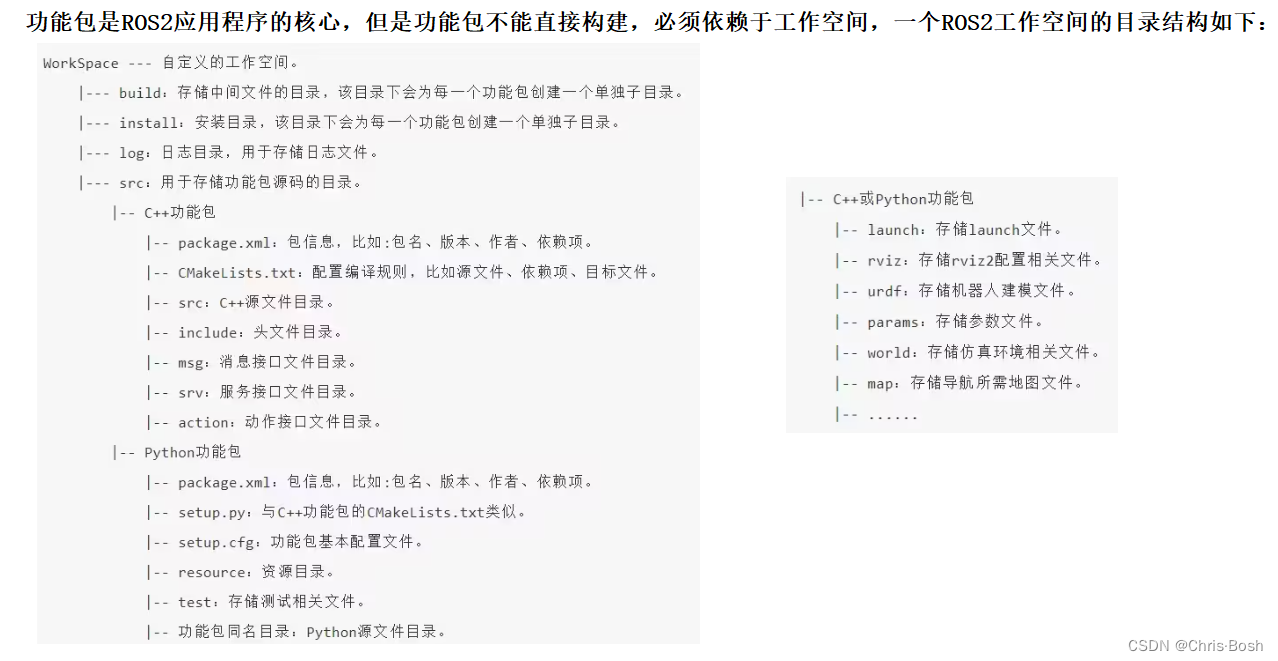
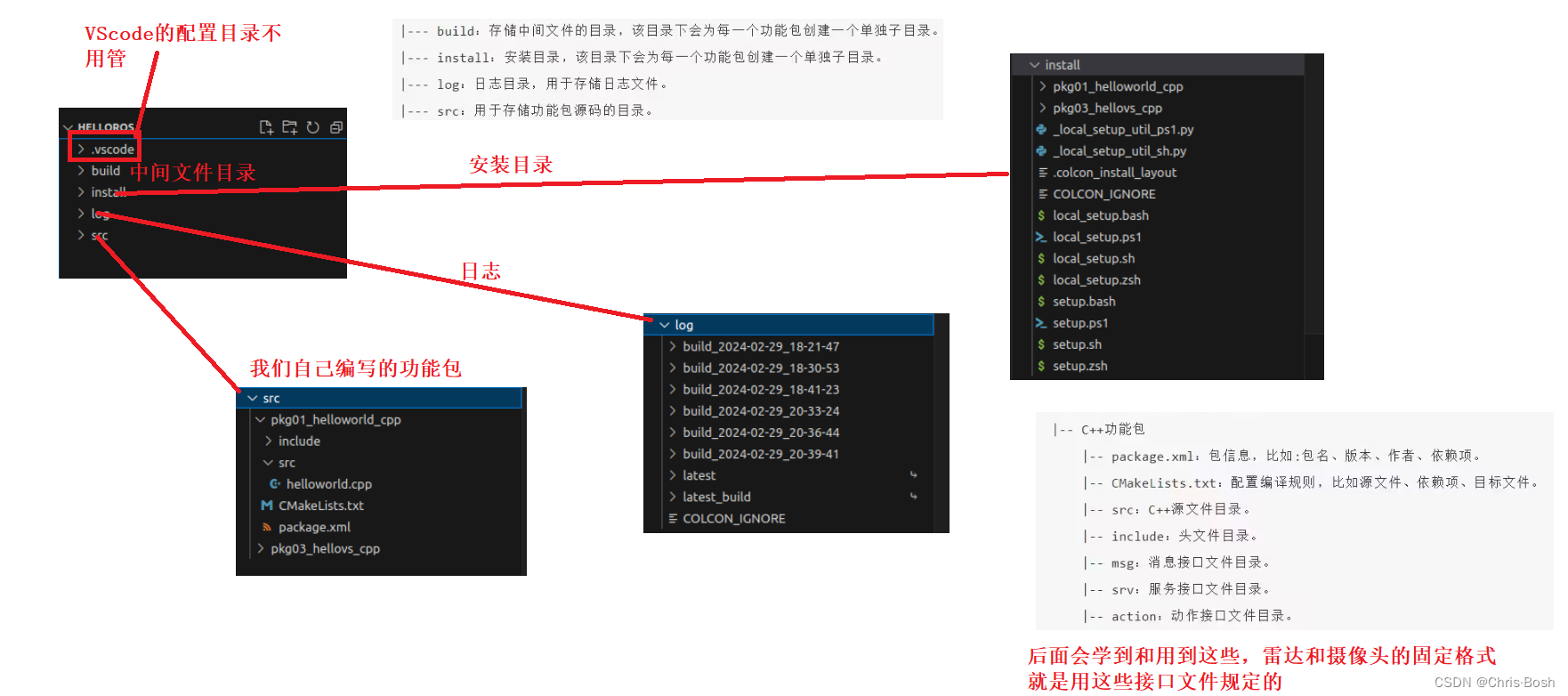
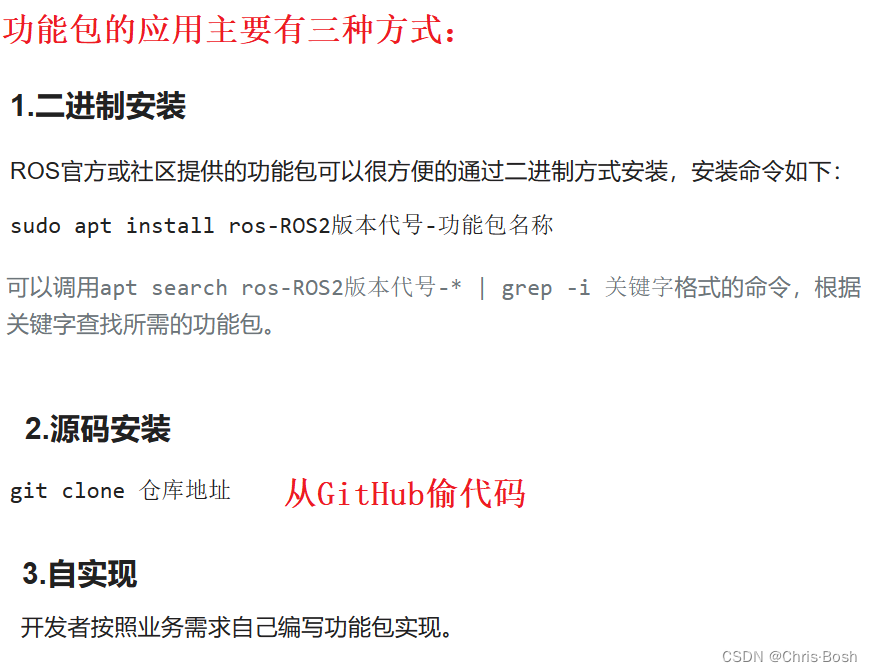
6.2 功能包
6.3 分布式
ROS2是一個分布式架構,不同的ROS2設備之間可以方便的實現通信,這在多機器人設備協同中是極其重要的。
6.4 終端命令和rqt
在ROS2中提供了豐富的命令行工具,可以方便的調試程序、提高開發效率。
rqt是一個圖形化工具,它的功能與命令行工具類似,但是圖形化的交互方式更為友好。
6.5 launch
通過launch文件,可以批量的啟動ROS2節點,這是在構建大型項目時啟動多節點的常用方式。
6.6 TF坐標變換
TF坐標變換可以實現機器人不同部件或不同機器人之間的相對位置關系的轉換。
6.7 可視化RVIZ
ROS2內置了三維可視化工具rviz2,它可以圖形化的方式顯示機器人模型或顯示機器人系統中的一些抽象數據。
提示:這里對文章進行總結:







數據采集)

)




)




