目錄(2024.02.22版)
1 定義
2 各種電機優勢比較
2.1 有刷與無刷比較?
2.2 交流與直流比較?
2.3 內轉子與外轉子比較?
2.4 低壓BLDC的一些優點
3 基本原理
3.1 單相無刷電機
3.2 三相無刷電機
4 驅動方法
4.1 六步換相控制
4.1.1 基本原理
4.1.2 系統框圖(待更新)
4.1.3 PWM調速(待更新)
4.1.4 速度和扭矩波動原因
4.2?正弦波控制
4.3 FOC控制(更新ing)
4.3.1 定義
4.3.2 總體思路
4.3.3 控制過程概述
4.3.4 技術關鍵(學習筆記待更新)
5 轉子位置信息的獲取
5.1?霍爾傳感器
5.2 反電動勢
6?系統設計(待更新)
0 參考出處
【僅作自學記錄,不出于任何商業目的。如有侵權,請聯系刪除,謝謝!】
- 文段:
- 維基百科直流無刷電動機???????、矢量控制直流無刷電動機???????
- 瑞薩電子官網何謂BLDC電機 | Renesas
- Machine DesignField-oriented control for motors
- MATLAB官網克拉克和帕克變換、計算最大轉矩電流比 (MTPA) 和弱磁運行的參考電流
- 知乎稚暉君【自制FOC驅動器】深入淺出講解FOC算法與SVPWM技術(非常好)
- 燈神寫一個比SimpleFOC更好的庫(非常好)
- 視頻:
- 廣州大學《機電一體化》課程視頻無刷直流電動機的特點、結構、原理和控制
- 德州儀器培訓視頻深入理解無刷直流電機(BLDC)原理以及控制
- EEWORLD大學堂matlab與電機控制(非常好)
- EEWORLD大學堂無刷直流電機基礎 - 驅動控制
- b站up主愛上半導體視頻無刷直流電機的工作原理
- 油管How To MechatronicsHow Brushless Motor and ESC Work and How To Control them using Arduino
?
1 定義
????????無刷直流電動機(BLDC,即Brushless DC Motor),也稱為電子換向電動機,?是一種沒有電刷和換向器的電動機,根據轉子永磁體位置調整定子電流以產生相應轉矩。知乎博主佟明昊一針見血地指出,其可定義為反電勢為梯形波的永磁同步電機。無刷電機系統的結構通常類似于永磁同步電機 (PMSM,即Permanent Magnet Synchronous Motor)。
【BLDC(無刷直流電機)和PMSM(永磁同步電機)】
????????關于二者區別,可參看:電子發燒友網簡要分析永磁無刷直流電機與永磁同步電機的差別、知乎徹底搞懂BLDC與PMSM的區別、航模電機為什么多用BLDC,而不是PMSM?,查閱資料后個人感覺不用太糾結于此。
? ? ? ? 一般來說,BLDC電機的定子繞組通常采用集中整距繞組,具有梯形波反電勢;而PMSM電機則往往使用分布短距繞組或者正弦繞組,具有正弦波反電勢。【復習集中/分布繞組:視頻電機集中/分布式繞組區別、知乎文章集中繞組和分布繞組區別?(集中-梯形-扭矩大-但諧波多損耗大;分布-正弦-損耗小)】但是,集中整距繞組不一定就是BLDC,而分布短距繞組大概率是PMSM。因為反電勢波形的制造比較復雜,集中整距繞組的電機不一定產生梯形波反電勢,而分布短距繞組更容易制造出正弦波反電勢。

2 各種電機優勢比較
? ? ? ? 通過比較,了解為何選擇BLDC電機。

| 特性 | BLDC電機 | 永磁有刷直流電動機 | 交流感應電動機 |
| 定子 | 多相繞組 | 永磁 | 多相繞組事 |
| 轉子 | 永磁 | 繞組 | 線繞組或籠型繞組 |
| 轉子位置傳感器 | 需要 | 不需要 | 不需要 |
| 電滑動接觸火花 | 無 | 有,換向器與電刷 | 無,或可能有集電環 |
| EMC干擾 | 較低 | 高 | 低 |
| 可聞噪聲 | 較低 | 高 | 低 |
| 電子控制器 | 必需 | 不是必需,調速時需要 | 不是必需,調速時需要 |
| 使用電源 | DC | DC | AC |
| 使用電壓范圍 | 高,受功率器件耐壓限制 | 較低,受換向器耐壓限制 | 高 |
| 機械特性 | 接近線性 | 線性 | 非線性 |
| 起動轉矩倍數 | 較高 | 較高 | 較低 |
2.1 有刷與無刷比較?
????????與有刷直流電機相比,無刷電機具有多項優勢:高扭重比(torque to weight ratio)、更大的每瓦扭矩、高可靠性、低噪音、通過消除電刷和換向器侵蝕來延長使用壽命、消除換向器火花,以及全面減少的電磁干擾(EMI)。由于轉子上沒有繞組,因此它們不會受到離心力的影響,并且由于繞組由外殼支撐,因此可以直接傳導冷卻,而不需要通過電機內部的氣流進行冷卻。這反過來意味著電機的內部可以完全封閉,以防止灰塵或其他異物進入。

| 特性 | BLDC電機 | 有刷直流電機 |
| 換向 | 根據霍爾位置傳感器進行電子換向 | 采用電刷換向 |
| 維護 | 由于無電刷而較少需要 | 需要定期維護 |
| 壽命 | 較長 | 較短 |
| 轉速/轉矩特性 | 平坦(在負載額定的條件下,可在所有轉速下正常 工作) | 中等平坦(轉速較高時,電刷摩擦增加,因此減少了有用轉矩) |
| 效率 | 高(沒有電刷兩端的壓降) | 中等 |
| 輸出功率/體積 | 高(由于出眾的散熱特性而縮小了體積。由于BLDC電機將繞組放在了連接至電機外殼的定子上,因而散熱更好) | 中等/低(電樞產生的熱量散發到氣隙中,這使氣隙中的溫度升高,限制了輸出功率/體積規范) |
| 轉子慣性 | 小,因為轉子上有永磁體 這改進了動態響應 | 較大的轉子慣性限制了動態特性 |
| 轉速范圍 | 較高(無電刷/換向器施加的機械限制) | 較低(有電刷的機械限制) |
| 產生的電子干擾 | 低 | 電刷中的電弧會對附近設備產生電磁干擾 |
| 制造成本 | 較高(由于其中有永磁體,制造成本較高) | 低 |
| 控制成本 | 復雜且昂貴 | 簡單且便宜 |
| 控制要求 | 要保持電機運轉,始終需要控制器 可使用這一控制器控制轉速 | 固定轉速不需要控制器,只有需要改變轉速時才需要控制器 |
2.2 交流與直流比較?
| 特性 | BLDC電機 | 交流感應電機 |
|---|---|---|
| 轉速/轉矩特性 | 特性曲線平坦,在負載額定的條件,可在所有轉速下正常工作。 | 特性曲線非線性,低轉速下轉矩也低。 |
| 輸出功率/體積 | 功率密度高,由于轉子采用永磁體,體積較小 | 功率密度中等,由于定子和轉子都有繞組,輸出功率與體積之比低于BLDC。 |
| 轉子慣性 | 慣性小,動態特性較佳 | 慣性大,動態特性較差 |
| 起動電流 | 額定值,無需專門的啟動電路。 | 大約是額定值的7倍,應謹慎選擇合適的啟動電路。通常使用星型-三角形啟動器。 |
| 控制要求 | 要保持電機運轉,始終需要控制器。還可使用這一控制器控制轉速。 | 固定轉速不需要控制器,只有需要改變轉速時才需要控制器。 |
| 差頻 | 定子和轉子磁場的頻率相等 | 轉子運行頻率低于定子磁場。差頻隨著電機負載的增大而增加。 |
2.3 內轉子與外轉子比較?
? ? ? ? 就BLDC自身結構而言,可分為內轉子和外轉子兩種:

-rotor:轉子;stator:定子;permanent magnet:永磁體;coil windings:線圈繞組;bearing:軸-
????????內轉子電機的優勢在于轉子的轉動慣量低,散熱非常快,在大多數工業應用中廣泛使用。外轉子電機的定子位于內側,轉子包括一個能夠旋轉外殼,磁體安裝在外殼上,定子發熱線圈與環境隔絕,散熱相對較慢。由于轉子的轉動慣量轉矩很大且很難控制轉子外殼的平衡,所以外轉子電機不適用于旋轉速度很高的模式。但外轉子電機可以擁有更短的結構并通常具備更小的停轉轉矩,而由于在相同的磁力下,它的轉子直徑更大,因此其轉矩也更大。
2.4 Delta型與Y型定子繞向比較

????????Delta型繞組電機在低速時提供低扭矩(Lower torque at low speed),但可以提供更高的最高速度(Higher top speed);Y型繞組在低速時可提供高扭矩(Higher torque at low speed),但最高速度不高(Lower top speed)。Delta型繞組結構允許含有奇次諧波電流在電機內循環,而Y型繞組并不包含寄生電流可流動的閉環結構(Immune to parasitic currents),從而防止額外損耗,故Y型繞組效率更高。除了Y型繞組較高阻抗外,從控制器的角度來看,不管是Y型還是Delta型連接,電機的驅動方式都是一樣的。
2.4 低壓BLDC的一些優點
- 集成電路功能集成: 板載小型封裝、低導通電阻功率?MOSFET、電流檢測放大器、溫度傳感器、集成 DC-DC、LDO 甚至電機控制器;
- 保護功能: 逐周期過流保護、過熱保護、失速檢測、自動重啟等;
- 更安全:低電壓運行;
- 更易制造:電機尺寸更小,需要工藝技術較低的,節省成本;
- 通用電壓工作范圍: 由于電機額定電壓為 24V,同樣的解決方案可用于 110V / 220V 線電壓產品,滿足全球各地的需求。
3 基本原理
????????BLDC使用電子控制器將直流電流轉換到電機繞組,通過控制電流導通關斷產生有效的空間旋轉磁場,驅使永磁轉子跟隨磁場旋轉。控制器調整直流脈沖的相位和振幅,以控制電機的速度和扭矩。?
3.1 單相無刷電機
???????以外轉子單相無刷電機為引,基于“同性相斥、異性相吸”的原理產生轉動:

????????上下線圈的繞向相反,則通電時極性相同:
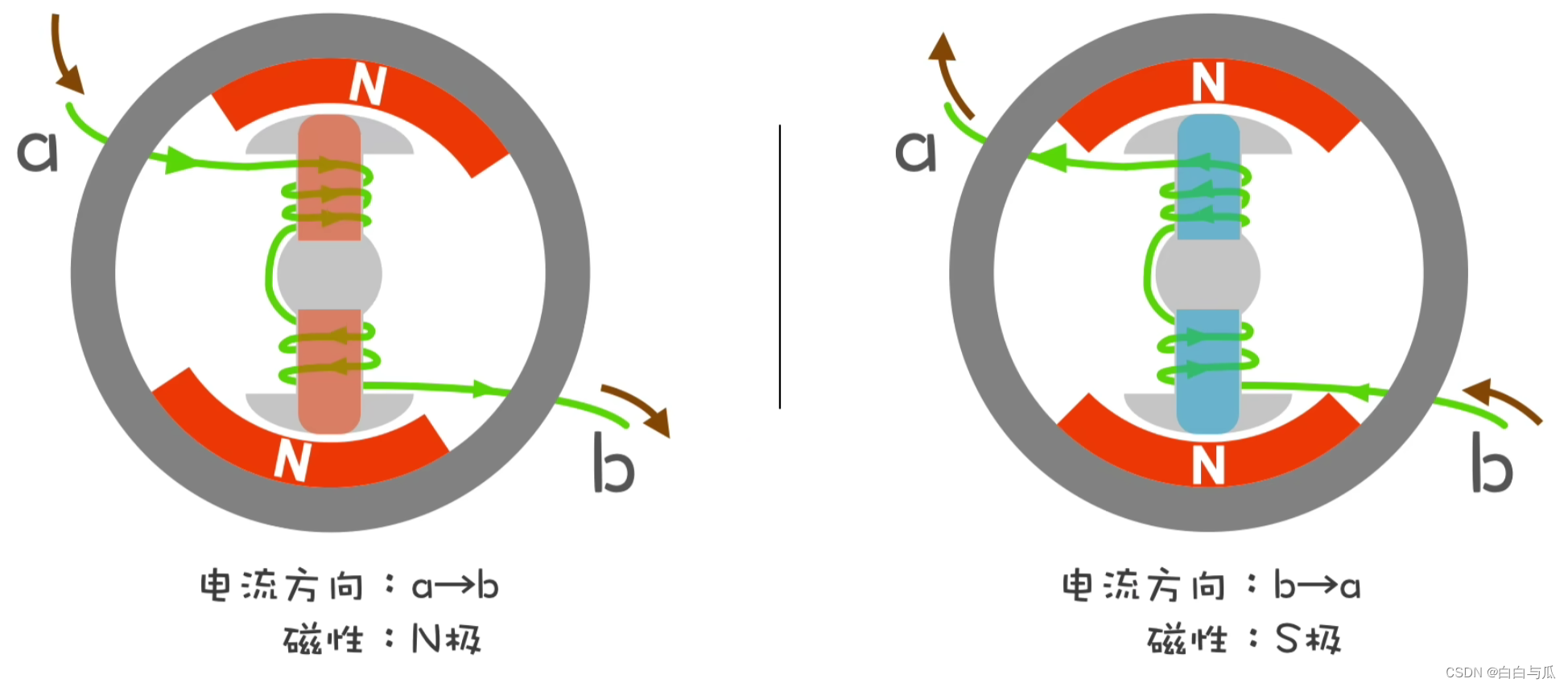
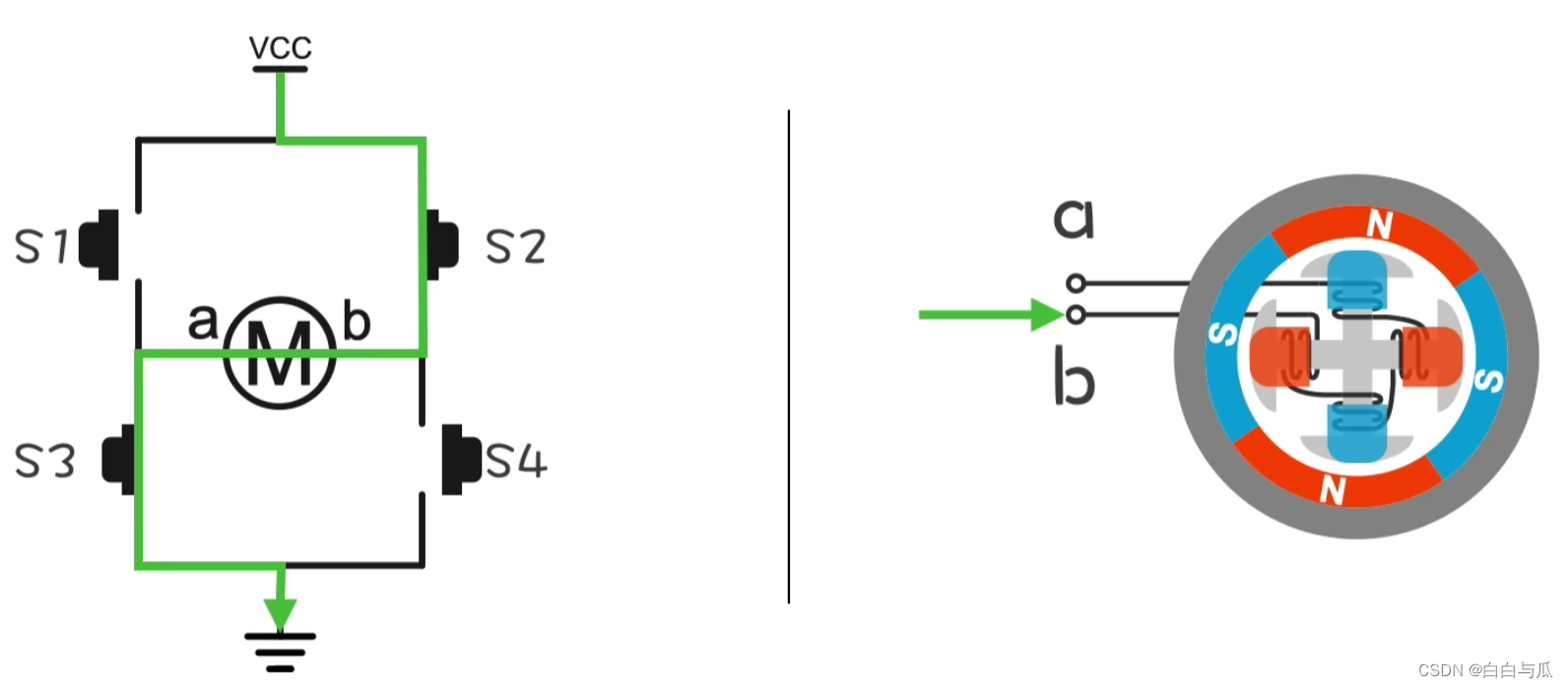
????????通過H橋交替導通,以變換流入a、b的電流方向,從而改變線圈極性,使其轉動起來。利用單片機進行控制時,S1-4這四個開關由MOS管來代替——這樣便可通過調節輸入MOS管的PWM占空比來控制轉速。
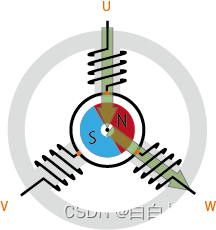
3.2 三相無刷電機
????????三相無刷電機的三個線圈則是彼此獨立的。由于依次導通單個線圈的方式線圈利用率低,故常采取星形連接一次導通兩相或三相。
????????外轉子:

? ? ? ? 內轉子:
????????下圖從左到右依次為,每60°、每90°、每15°進行一次換相:
? ?
?
? ? ? ? 三相無刷電機數學模型為:?
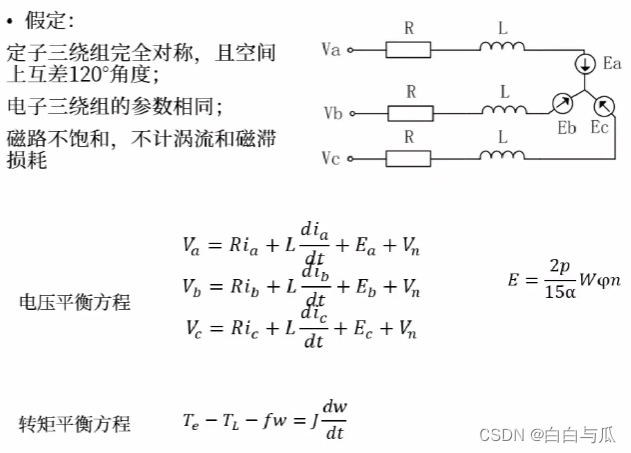 ?
?
? ? ? ? 其運行特性為:
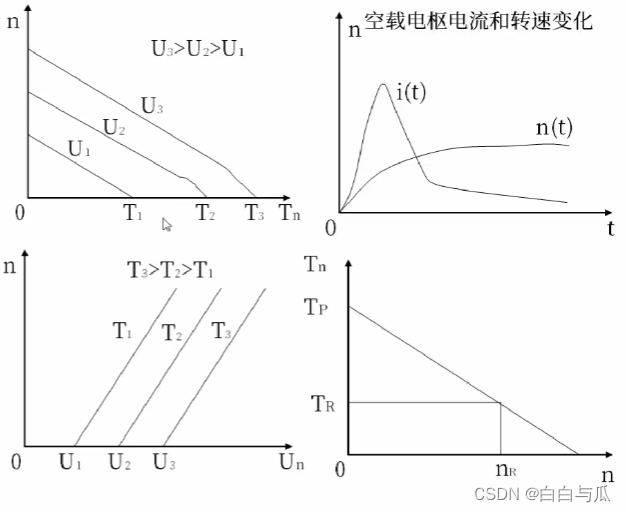
-從上到下從左到右分別為:轉速-轉矩;轉速-外施電壓;空載電樞電流-時間? 轉速-時間;額定轉矩-轉速-
4 驅動方法
4.1 六步換相控制
4.1.1 基本原理
?????????從U相向W相通電,則會產生方向不同的2個磁通量,而這兩個磁通量可以合成一個指向右下30°方向的總磁通量
?

? ? ? ? 如上述所示,每次同時控制兩個線圈導通,按順序從1-6變更通電模式,則合成磁通量將順時針旋轉。通過變更合成磁通量的方向,控制速度,可控制轉子的旋轉速度。將切換這6種通電模式來控制電機的控制方法稱為“六步換相控制(Six-Step Commutation)”,或稱“120度通電控制”、“梯形控制(Trapezoidal Control)”:
? ? ? ? 盡管在六步換相控制下合成磁通量的方向會發生旋轉,但其方向不過只有6種。比如將“通電模式1”改為“通電模式2”,則合成磁通量的方向將變化60度。然后轉子將像被吸引一樣發生旋轉。接下來,從“通電模式2”改為“通電模式3”,則合成磁通量的方向將再次變化60度。轉子將再次被該變化所吸引。這一現象將反復出現。這一動作將變得生硬。有時這動作還會發出噪音。
?????????下圖所示即換向邏輯,圖中A、B、C三個字母代表相(Phase);H和L分別代表高側(High Side)和低側(Low Side):
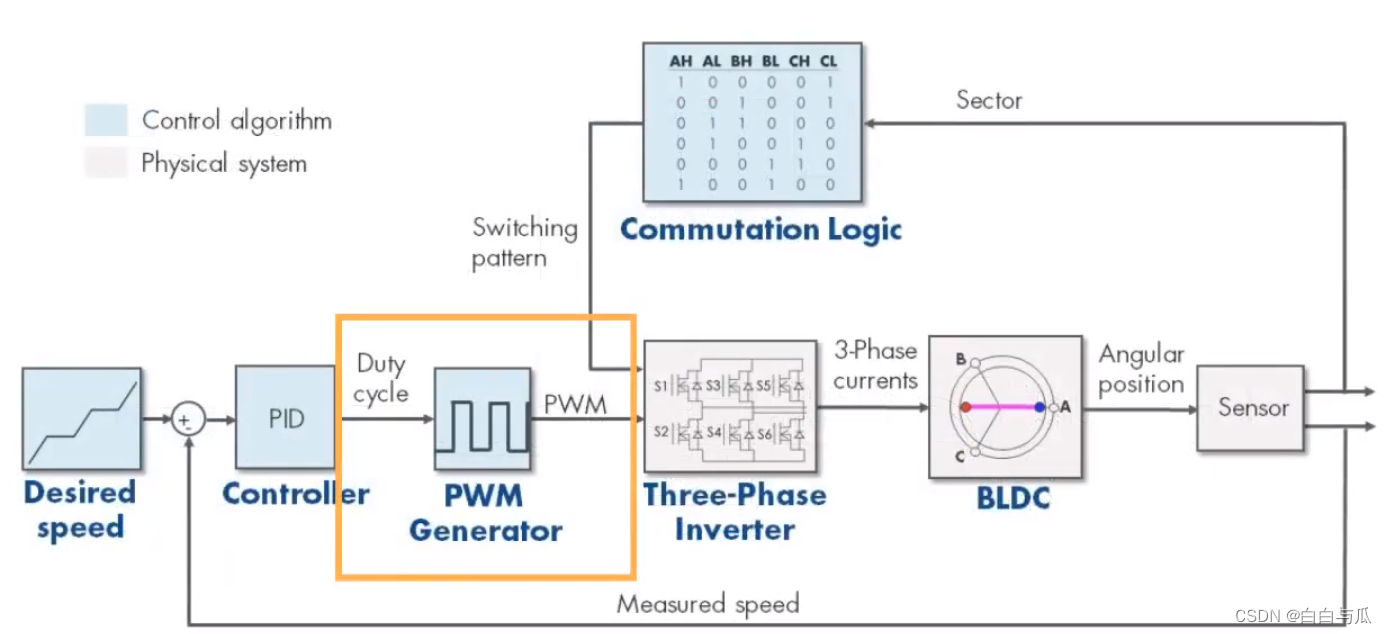
4.1.2 系統框圖(待更新)

?????????相應simulink仿真:
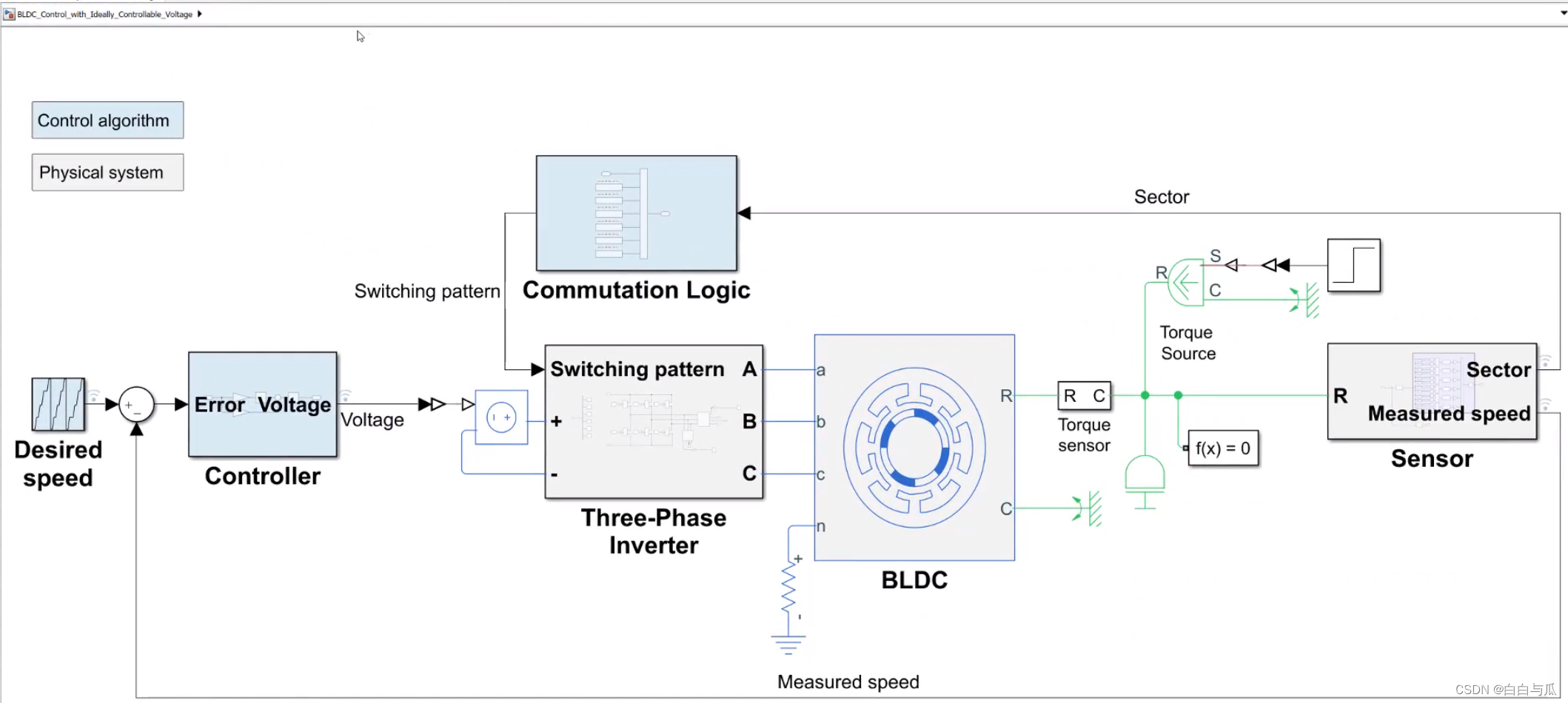
?
4.1.3 PWM調速(待更新)
4.1.4 速度和扭矩波動原因
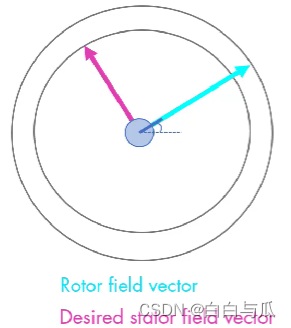
????????下圖中青色矢量表示轉子磁場方向與大小、紫色矢量表示定子磁場方向與大小:
? ? ? ? 從圖中可以看出,二者磁場夾度一直在60°和120°之間波動,這便是速度和扭矩波動背后的原因,這也使我們無法持續得到最大扭矩(磁場夾度為90°時,扭矩最大)。而磁場定向控制(即后文的FOC控制)便可很好地解決這個問題。
4.2?正弦波控制
????????能消除六步換相動作生硬、動作噪聲等缺點,并實現流暢的轉動的正是“正弦波控制”。在六步換相控制中,合成磁通量被固定在了6個方向,且各相生成的磁通量大小相同。但是,若能較好地調整各相電流,則可讓各相線圈同時產生大小各異的磁通量,精密地控制合成磁通量的方向。通過控制這一磁通量連續生成,可使電機流暢地轉動:
?????????正弦波控制為3相通電,流暢地改變合成磁通量的方向,因此轉子將流暢地旋轉。六步換向控制切換了U相、V相、W相中的2相,以此來使電機轉動,而正弦波控制則需要精確地控制3相的電流。而且控制的值是時刻變化的交流值,因此,控制變得更為困難。
4.3 FOC控制(更新ing)
4.3.1 定義
???????矢量控制,又稱磁場定向控制(FOC,即Field-Oriented Control),是一種變頻驅動(VFD)控制方法,其中三相交流或無刷直流電機的定子電流被識別為兩個正交分量,可通過矢量直觀顯示。其中一個分量定義了電機的磁通量,另一個分量定義了轉矩。驅動器的控制系統根據驅動器速度控制給出的磁通和轉矩參考值計算出相應的電流分量參考值。
????????矢量控制會依照程式中計算的電流矢量,產生三相PWM的電壓提供給電機,目的是要控制電機的三相電流。其中會將電流及電壓等物理量在二個系統之間轉換,一個是隨速度及時間改變的三相系統,另一個則是二軸非線變的旋轉坐標系統。
????????但是,矢量控制計算需要高分辨率下的轉子的位置信息。位置檢測有兩種方法,即使用光電編碼器或轉角傳感器等位置傳感器的方法,以及根據各相的電流值進行推算的無傳感器方法。通過該坐標變換可直接控制扭矩(旋轉力)的相關電流值,從而實現沒有多余電流的高效控制。

4.3.2 總體思路和控制過程概述
????????前文4.1.4中提到,六步換向控制由于轉子和定子磁場夾角無法一直保持在90°,故存在速度和扭矩波動波動問題。而磁場定向控制便可解決這一問題:讓轉子和定子磁場始終保持正交。這大大降低了系統響應的紋波,并使電機運行更加平穩。此外,還可以使用弱磁技術使電機以高于額定速度的速度運行。
? ? ? ? 我們知道,當轉子和定子磁場夾角重合時,力矩為0;而當二者夾角逐漸增大到90°時,便可獲得最大力矩:
? ? ? ? 那么如何保持二者磁場正交呢?
- 確定轉子位置;
- 基于轉子位置,確定定子磁場矢量的期望方向,使它與轉子磁場正交;
- 對三相電流進行控制,使其產生所需的定子磁場矢量。
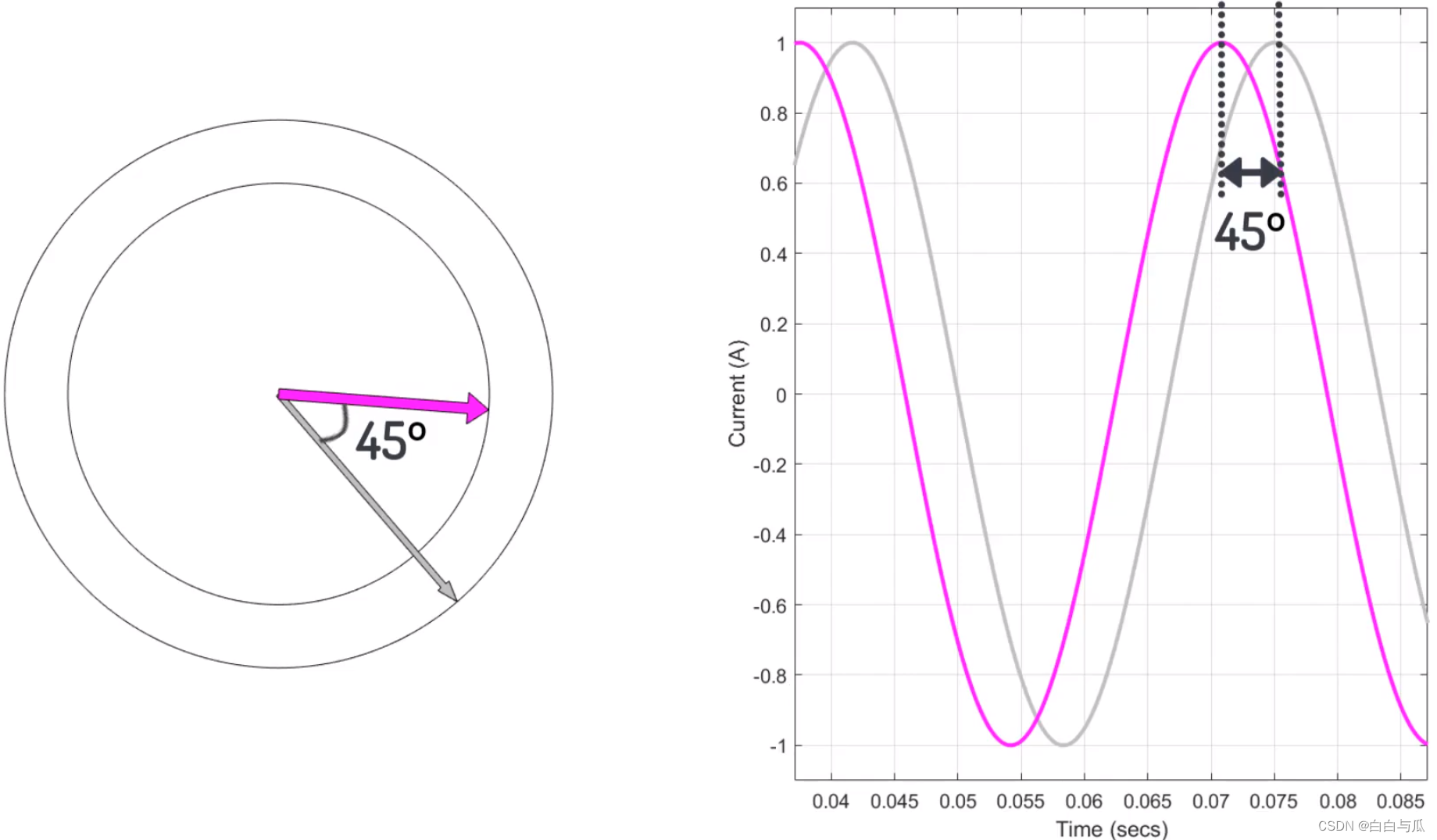
? ? ? ? 下圖中紫色矢量為定子磁場矢量,而灰色矢量則指向與轉子磁場相同的方向。我們期望紫色矢量領先灰色矢量90°。假設此時紫色矢量僅領先45°,而時序圖上對應的相位波形亦超前45°。此時雖有助于產生力矩,但并非是我們想要的最大力矩。
????????接下來,我們將紫色矢量沿著兩個正交軸進行分解(該過程即Clarke變換和Park變換):沿著灰/藍色矢量或轉子磁場方向的軸稱為直軸(d軸),而與直軸正交的另一軸稱為交軸(q軸)。
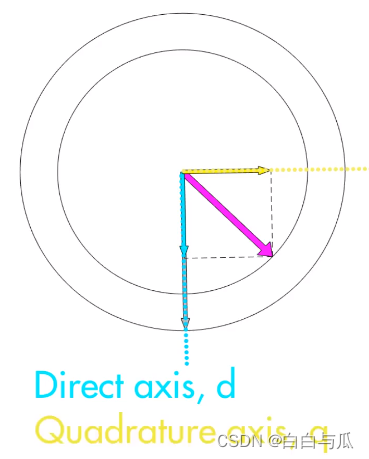
? ? ? ? 此時,我們只需要強制直軸分量為零,而同時允許交軸分量增長,當直軸分量完全減小至零時,定子磁場矢量便于轉子磁場矢量正好成90°:

????????那么這三相電流應如何變化以保持定子磁場與轉子磁場正交呢?
????????下圖中,紅、綠、藍仨矢量分別代表A相、B相和C相電流,三者合成的總矢量則為定子磁場矢量,用紫色矢量表示。灰色矢量仍表示為轉子磁場方向。藍色和黃色箭頭則分別表示直軸和交軸方向:
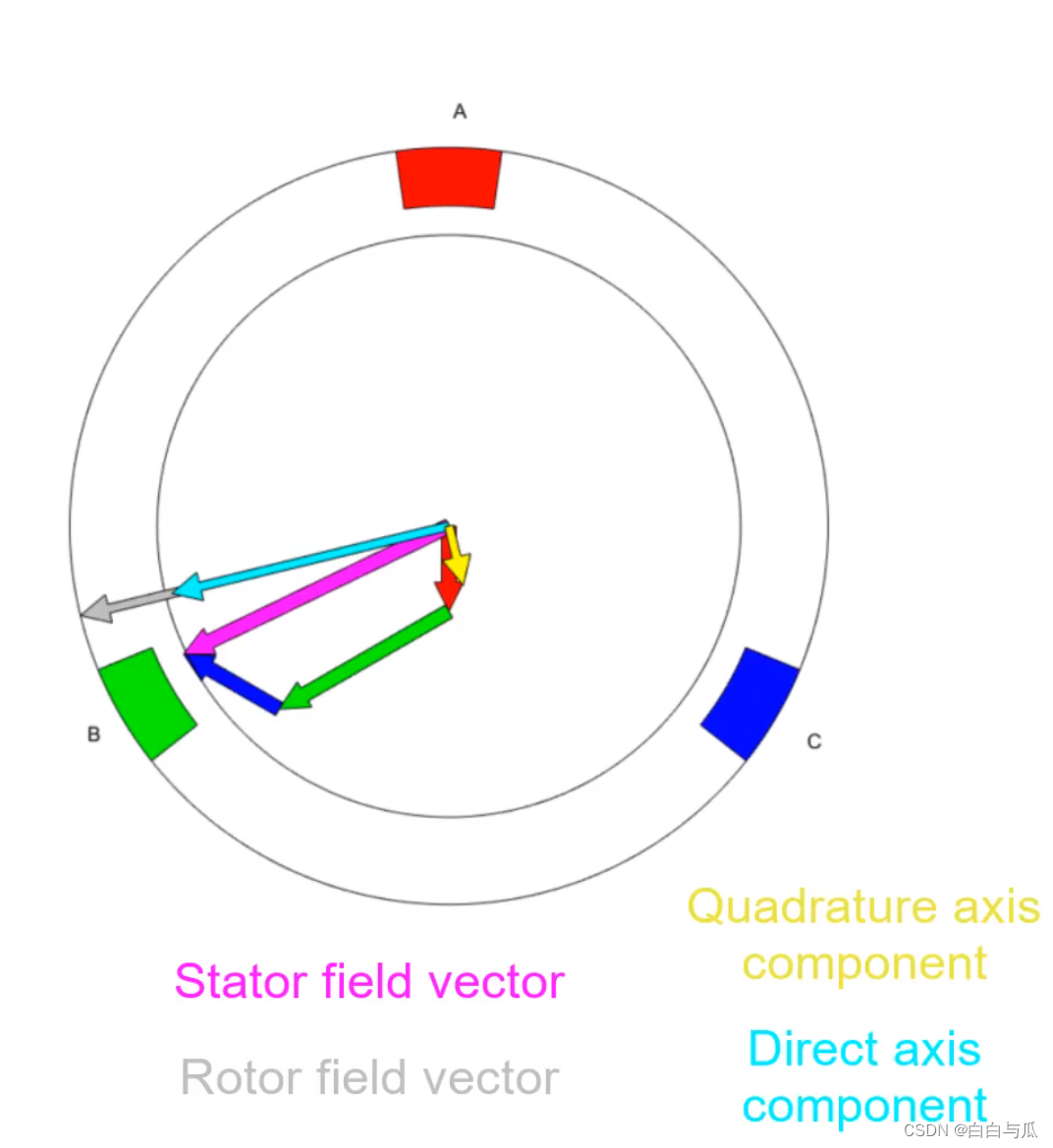
????????強制直軸分量為零,同時允許交軸分量增長:

? ? ? ? 上文過程中,我們需要控制三相電流以便能控制電機的速度和扭矩,但是我們并不是直接控制三相電流,而是通過Clarke變換和Park變換將其直接轉換為直軸和交軸電流。為什么這樣捏?因為在FOC控制系統中,PID控制器很難控制交流信號。而Clarke變換和Park變換會將靜止的定子參考坐標轉換為旋轉參考坐標,使我們不再需要直接控制交流電流,只需直接控制直軸和交軸電流即可。

????????從上文分析中可知,交軸電流Iq有助于產生扭矩,而直軸電流Id則不會產生任何扭矩,因此,為了獲得最大扭矩,我們可以使用兩個PI控制器:一個使Id歸零,而另一個使Iq最大化。
? ? ? ? 由上分析,FOC控制過程可歸納如下(與上面動圖搭配看):
- 對三相電流采樣得Ia、Ib、Ic(或記作IU、IV、IW);
- 應用Clarke變換和Park變換將三相電流Ia、Ib、Ic轉換為Iq、Id電流(Ia、Ib、Ic經Clarke變換得到Iα、Iβ,再經Park變換得到Iq、Id);
- 將所得電流Iq、Id與期望值Iq_ref、Id_ref(由上分析知,Id_ref一般是0)進行比較計算,得出的誤差作為PI控制器的輸入;
- 由PI控制器輸出電壓Vq、Vd。此時電壓仍為旋轉坐標系中的變量,所以在將電壓給到電機之前,需要將其轉換為三相電壓
- Vq、Vd經反Park變換得到Vα、Vβ,再經反Clarke變換或其他方式合成電壓空間矢量,輸入SVPWM模塊進行調制,輸出控制三相逆變器的MOS管開關的編碼值,驅動電機;
- 循環上述過程。

4.3.4 技術關鍵點
大佬們已寫得足夠詳盡,具體參閱:
- 知乎稚暉君【自制FOC驅動器】深入淺出講解FOC算法與SVPWM技術
- 燈神3 FOC軟件控制原理?
- 三相電流采樣
????????由于電機工作的電流一般很大,所以采樣電阻的阻值非常小,甚至和導線的電阻接近了,因而實際的采樣電路PCB設計的時候還有一些講究,比如使用開爾文接法(Kelvin Connections)【可參閱知乎博文:開爾文接法在電力電子中的應用有哪些?】。根據基爾霍夫電流定律(KCL)(在任一時刻,流入節點的電流之和等于流出節點的電流之和:Ia+Ib+Ic=0),我們實際電路設計時可以不使用三個采樣器,只需要兩個就夠了。
-
Clarke、Park變換及反變換
????????這部分燈哥解釋和推導都非常非常清楚:3.1 克拉克變換?,筆者僅貼公式在此。
? ? ? ? 明顯地,Ia、Ib、Ic三個基向量是非正交的:
????????將Ia、Ib、Ic的投影結果處理后列成矩陣形式,該式即Clarke變換的等輻形式:
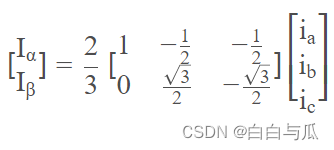
????????又根據基爾霍夫電流定律,有ia+ib+ic=0,則可得:
- PID控制
- 電壓空間矢量
- SVPWM

5 轉子位置信息的獲取

???????BLDC電機的控制是配合著轉子(永磁體)的位置(角度)進行的,那如何獲知控制所需的轉子的位置信息?一般有有傳感器和無傳感器兩種方案:
- 有傳感器方案一般采用霍爾元件、光柵編碼器、轉速反饋頻率信號(FG trace)、旋轉變壓器(Resolver)等方式。
| 電機類型 | 傳感器種類 | 主要用途 | 特征 |
|---|---|---|---|
| BLDC | 霍爾效應傳感器 | 梯形波、120度通電控制 | 每60度獲取一次信號,價格較低,不耐熱。 |
| PMSM | 光電編碼器 | 正弦波控制、矢量控制 | 有增量型(可得知原位置開始的移動距離)和絕對型(可得知當前位置的角度)兩種。 分辨率高,但抗震性、防塵能力較弱,成本較高。 |
| 轉角傳感器 | 正弦波控制、矢量控制 | 分辨率高,適用于惡劣環境。 |
- 而無傳感器方案一般采用反電動勢檢測等方式。
5.1?霍爾傳感器
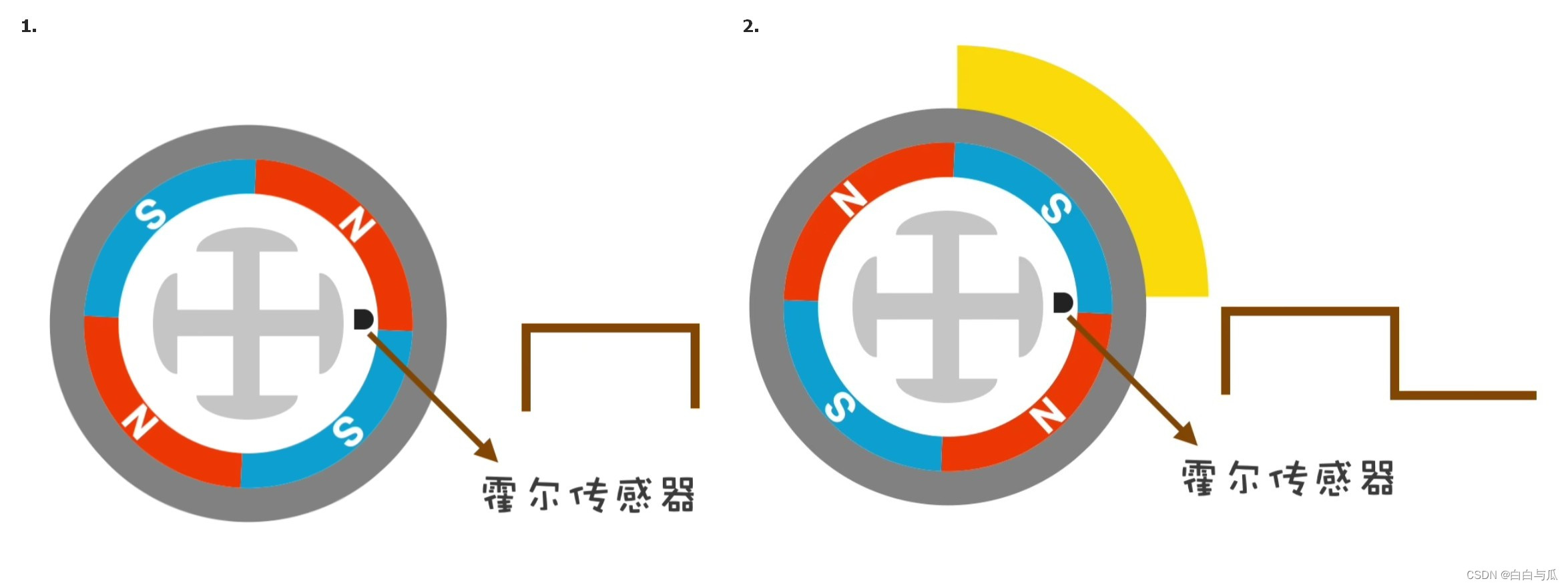
?????????霍爾傳感器在N極靠近時輸出高電平、S極靠近時輸出低電平:
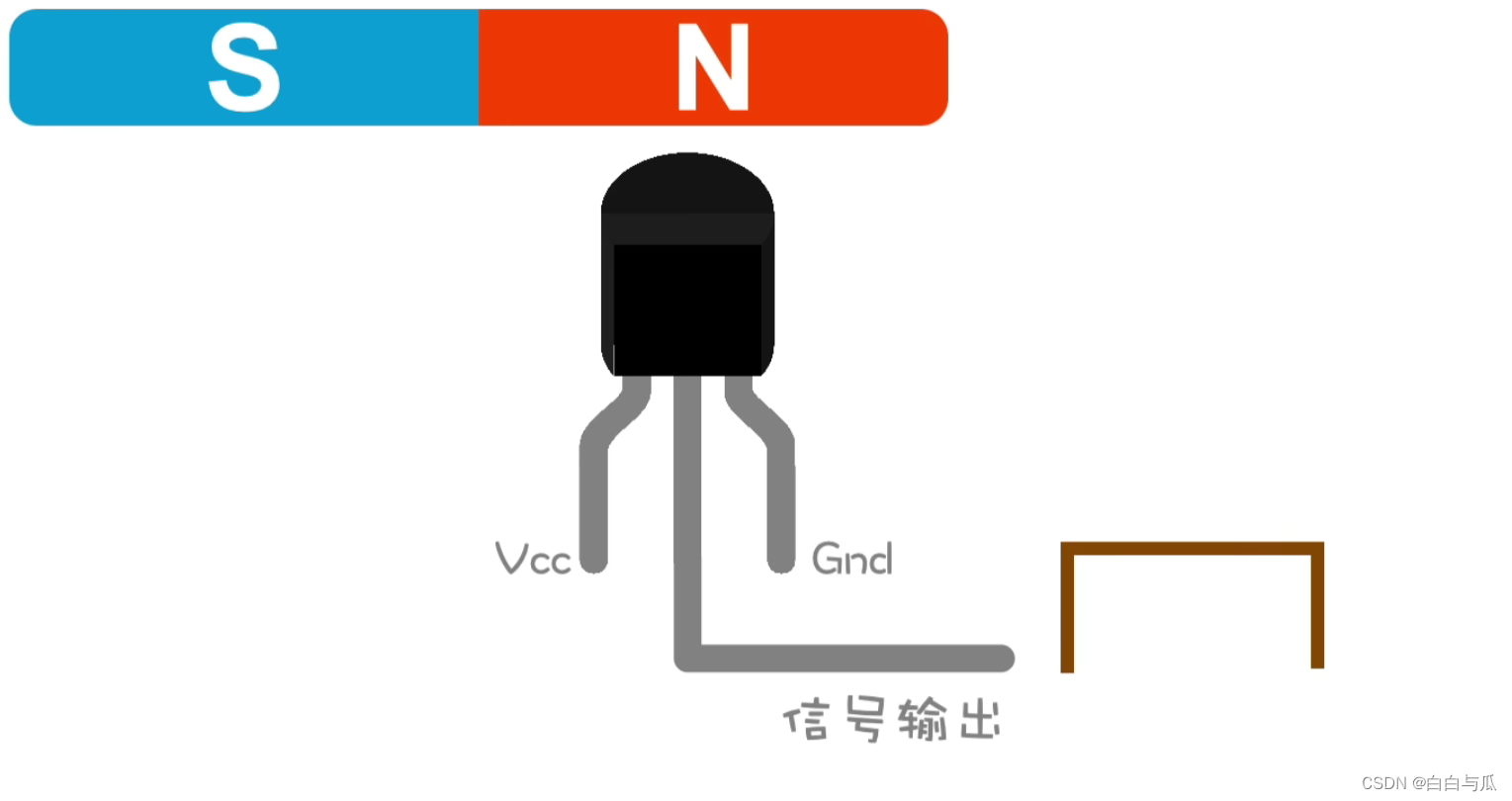
? ? ? ? ?霍爾傳感器并不會提供轉子在扇區內的精確位置,但可以檢測轉子何時從一個扇區過渡到另一個扇區。以單相無刷電機為例,每當轉子轉過90度,霍爾信號輸出電平交換一次。旋轉一周則改變4次。
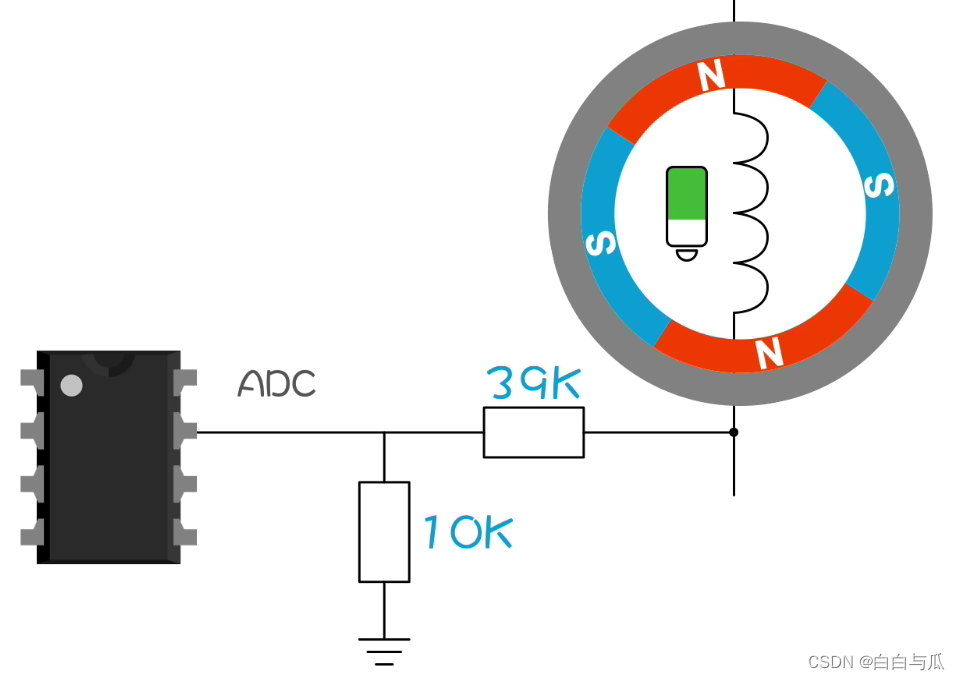
????????一般采用加裝霍爾元件的方法,來防止在臨界位置時電平紊亂輸出的干擾:

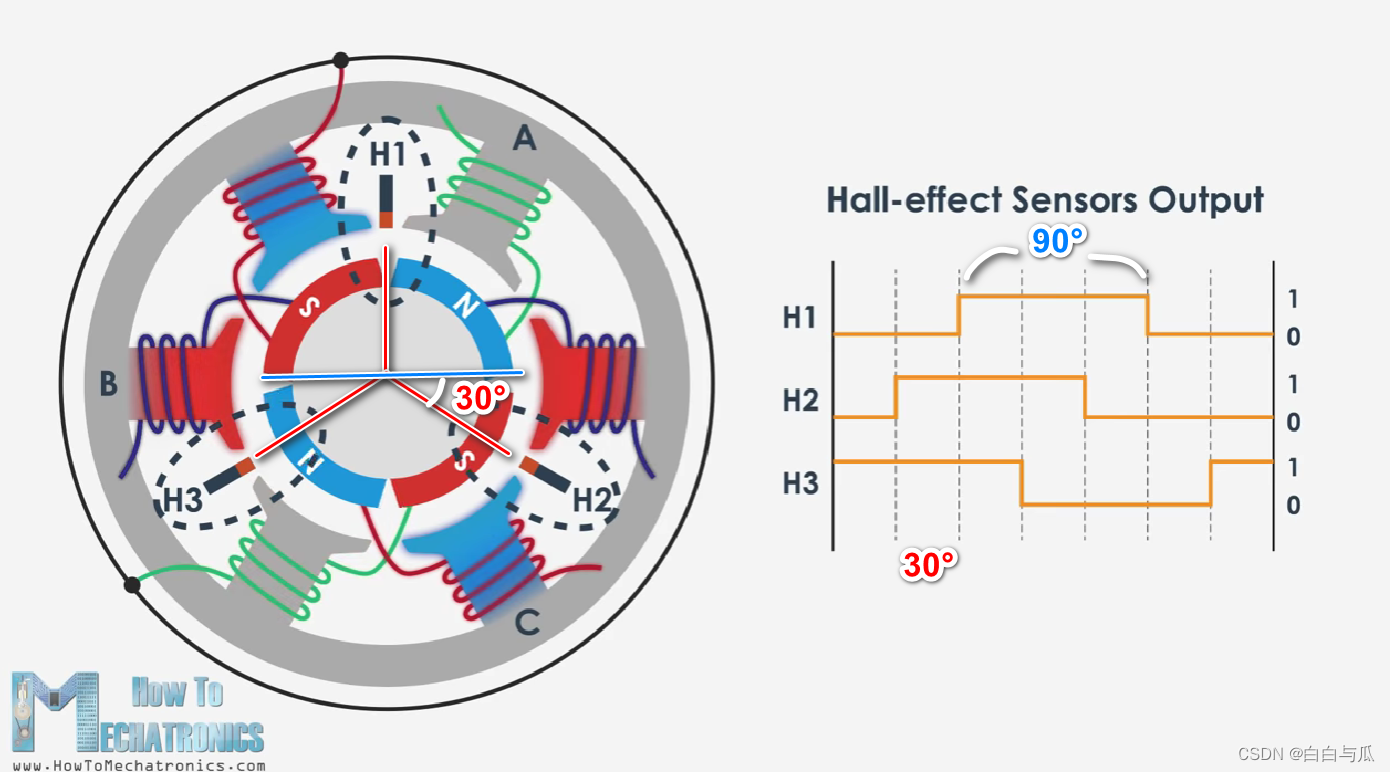
?????????多數BLDC電機在其非驅動端上的定子中嵌入了三個霍爾傳感器。根據這三個霍爾傳感器信號的組合,就能決定換向的精確順序。每次換向,都有一個繞組連到控制電源的正極,第二個繞組連到負極,第三個處于失電狀態。其中,繞組加電的順序由六步換向定義。下圖為三個60°間距霍爾傳感器輸出的高低電平波形及實際安裝位置:

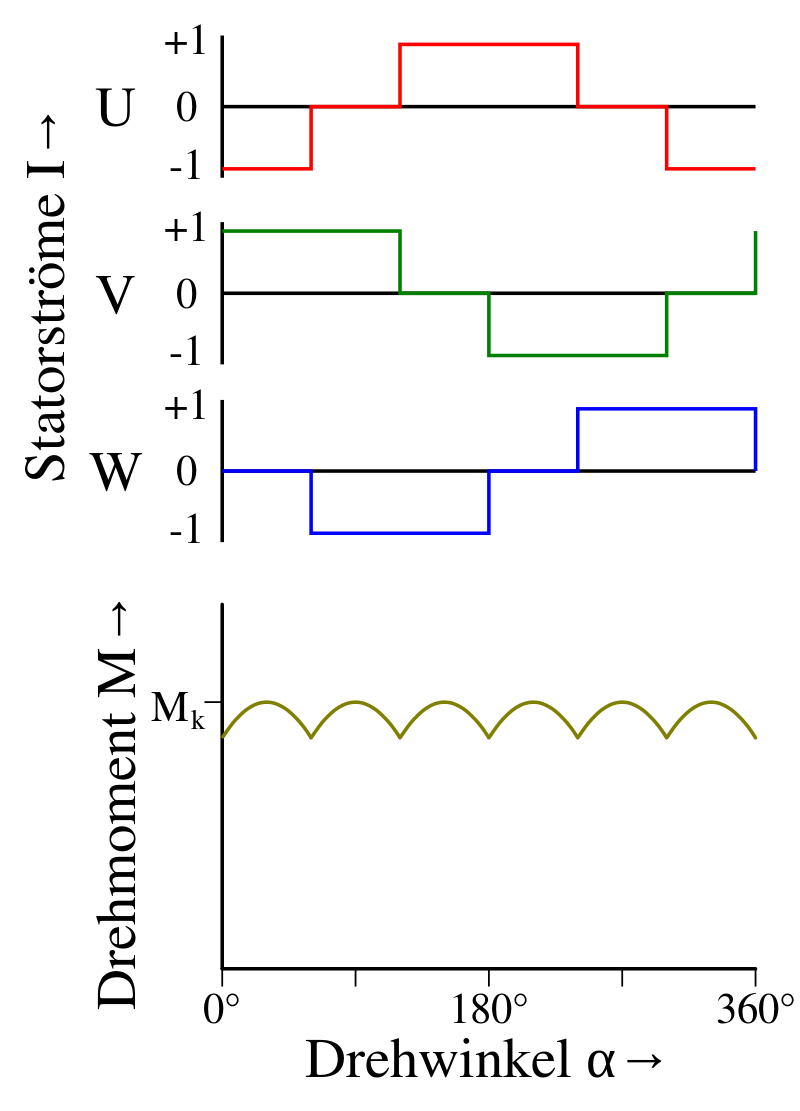
????????或采用120°間距排布:
? ? ? ? 各相定子電流I、轉矩M與轉角α的關系:
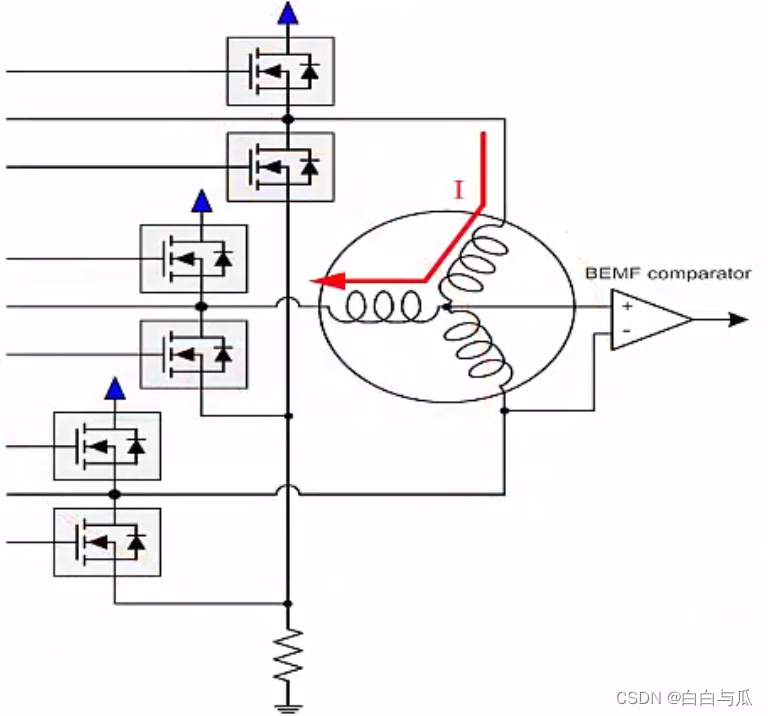
5.2 反電動勢
????????在既定電機磁通量和繞組數固定的情況下,反電動勢的幅度與電機的旋轉速度成正比。當電機在控制模式下運轉多個換向周期直到獲得一定速度后,無傳感器測量便能夠確定轉子位置。無傳感器控制的BLDC電機適合安裝在難以檢修的位置,或在多灰塵、多油的環境中運行,但不適合需要較低速度的應用,因為此時反電機勢很小而難以測量(故其啟動需要特殊方法),會造成工作效率不高。
? ? ? ? 一般監測未被驅動相的反電動勢變化信息(過零點信息)推算轉子角度:

? ? ? ? 若三相均被驅動,則綜合電壓電流信息來估算反電勢波形,通過過零點信息估計轉子位置。
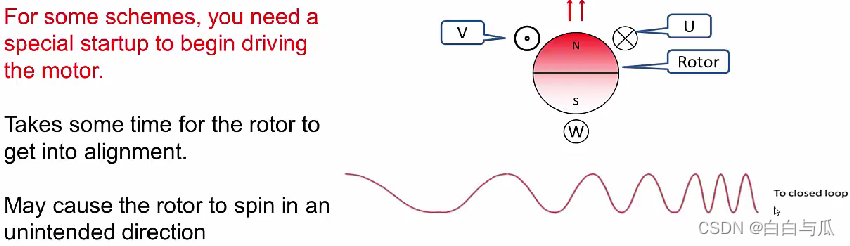
????????基于反電動勢測量轉子位置的控制器,在啟動時會面臨額外的挑戰:轉子靜止時不會產生反電動勢(只有當轉子磁場切割定子線圈時才會產生反電動勢)。目前經常采用的啟動方法為“三段式”啟動。一般來說,三段式啟動包括定位、加速、切換三個過程。
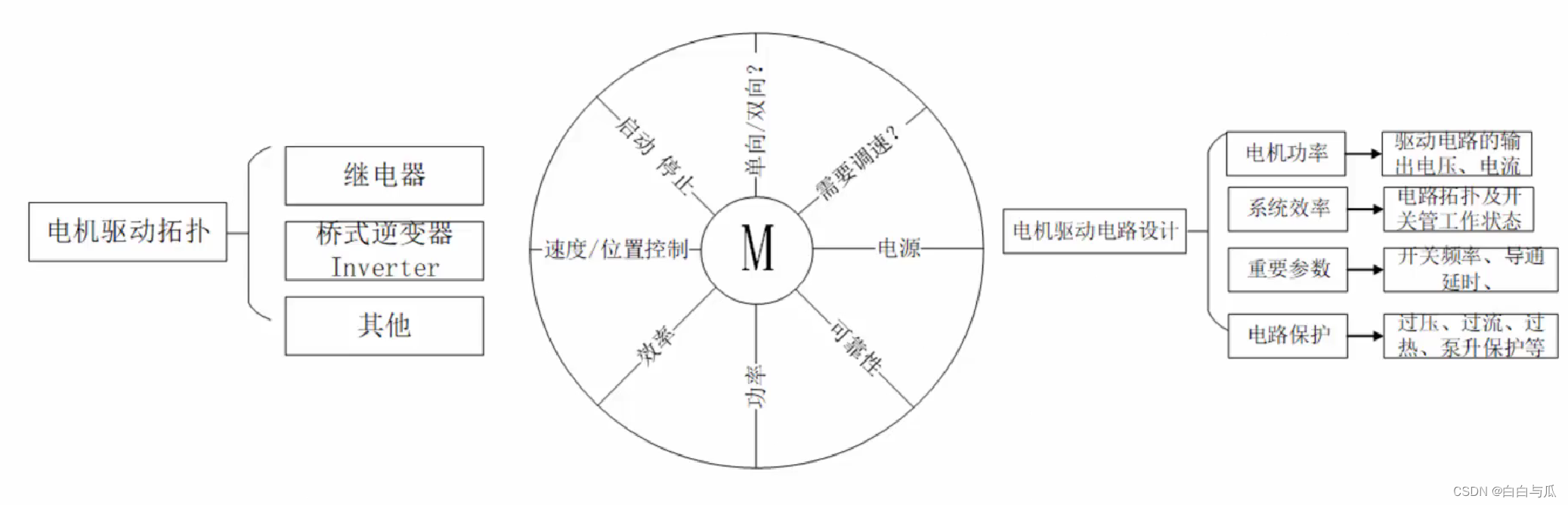
6?系統設計(待更新)
?


)



》)
)










——哈希表+區間)