目前,工業機器人大部分集中于傳統的焊接、噴涂等領域,我國工業機器人的核心部件和整機市場仍被國外壟斷,工業機器人要面向整個智能制造市場,還需要具備應對整個智能制造過程中大多數工藝的能力,而工業互聯網則是實現智能制造的關鍵基礎設施。
“國產工業機器人產量達到14.77萬臺,”近期國家統計局公布的2018年數據,相較于2017年的13.1萬臺,同比增長12.7%。實際上,近幾年,我國工業機器人的生產制造一直保持高速增長,同時我國也已成為全球第一大工業機器人應用市場。
在發達國家,工業機器人自動化生產線已經成為自動化設備的主流和未來發展方向。汽車工業、電子電氣工業、工程機械、建筑、煤炭工業、化工等許多國外行業都配備了大量工業機器人自動化生產線,以保證產品質量,提高產量。
由于工業機器人具有良好的可編程性和通用性,能夠滿足多樣化工業產品和小批量生產的要求,工業機器人的應用領域也得到了極大的拓展。在工業生產中,諸如弧焊機器人、點焊機器人、裝配機器人、噴涂機器人和搬運機器人的工業機器人已經被廣泛使用。以下是工業機器人在現代工廠中的具體應用的詳細介紹。

激光焊接工業機器人
第一種應用就是工業焊接機器人,眾所周知,焊接加工一方面要求焊工具有熟練的操作技能、豐富的實踐經驗和穩定的焊接水平;另一方面,焊接又是一種勞動條件差、煙塵多、熱輻射大、危險性高的工作。工業機器人的出現使人們自然而然地想到用它替代人的手工焊接,這樣不僅可以減輕焊工的勞動強度,同時也可以保證焊接質量和提高生產效率,這也是若干年以來人們千方百計追求的目標。據不完全統計,全世界在役的工業機器人大約有近一半用于各種形式的焊接加工領域。隨著先進制造技術的發展,焊接產品制造的自動化、柔性化與智能化已成為必然趨勢。而在焊接生產中,采用機器人焊接則是焊接自動化技術現代化的主要標志。
使用機器人完成一項焊接任務只需要操作者對它進行一次示教,隨后機器人即可精確地再現示教的每一步操作。如讓機器人去做另一項工作,無須改變任何硬件,只要對它再做一次示教即可。其主要優點有以下幾個方面:
穩能提高焊接質量,保證其均勻性;提高勞動生產率,一天可 24 小時連續生產; 改善工人勞動條件,可在有害環境下工作;降低對工人操作技術的要求;縮短產品改型換代的準備周期,減少相應的設備投資 等許多優點。

激光焊接產品
第一種是點焊機器人
點焊機器人是用于點焊自動作業的工業機器人,其末端持握的作業工具是焊鉗。 實際上,工業機器人在焊接領域的應用最早是從汽車裝配生產線上的電阻點焊開始的。最初,點焊機器人只用于增強焊作業,即往已拼接好的工件上增加焊點。后來,為保證拼接精度,又讓機器人完成定位焊作業。點焊機器人逐漸被要求有更全的作業性能,點焊用機器人不僅要有足夠的負載能力,而且在點與點之間移位時速度要快捷,動作要平穩,定位要準確,以減少移位的時間,提高工作效率。具體來說如下:安裝面積小,工作空間大;快速完成小節距的多點定位(如每0.3~0.4s 移動 30~50mm 節距后定位); 定位精度高(± 0.25 mm ),以確保焊接質量; 持重大( 50~150 kg ),以便攜帶內裝變壓器的焊鉗; 內存容量大,示教簡單,節省工時; 點焊速度與生產線速度相匹配,同時安全可靠性好。

汽車工業中使用的點焊機器人
第二種是弧焊機器人
弧焊機器人是用于弧焊(主要有熔化極氣體保護焊和非熔化極氣體保護焊)自動作業的工業機器人,其末端持握的工具是焊槍。弧焊過程比點焊過程要復雜得多,被焊工件由于局部加熱熔化和冷卻產生變形,焊縫軌跡會發生變化。因此,焊接機器人的應用并不是一開始就用于電弧焊作業。而是伴隨焊接傳感器的開發及其在焊接機器人中的應用,使機器人弧焊作業的焊縫跟蹤與控制問題得到有效解決.由于弧焊工藝早已在諸多行業中得到普及,使得弧焊機器人在通用機械、金屬結構等許多行業中得到廣泛運用。

弧焊機器人在工作
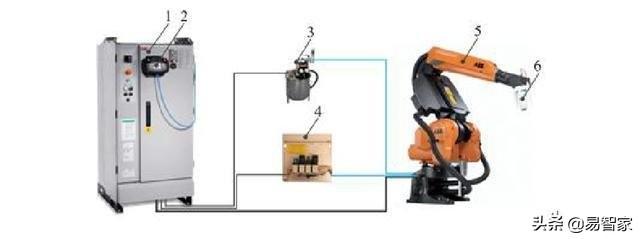
第三種是激光焊接機器人
激光焊接機器人是用于激光焊自動作業的工業機器人,通過高精度工業機器人實現更加柔性的激光加工作業,其末端持握的工具是激光加工頭。 具有最小的熱輸入量,產生極小的熱影響區,在顯著提高焊接產品品質的同時,降低了后續工作量的時間 。激光焊接成為一種成熟的無接觸的焊接方式已經多年,極高的能量密度使得高速加工和低熱輸入量成為可能。與機器人電弧焊相比,機器人激光焊的焊縫跟蹤精度要求更高。其要求如下:高精度軌跡(≤ 0.1mm);持重大( 30~50 kg ),以便攜帶激光加工頭;可與激光器進行高速通信;機械臂剛性好,工作范圍大;具備良好的振動抑制和控制修正功能。

激光焊接機器人
第二大類為搬運機器人
搬運機器人具有通用性強、工作穩定的優點,且操作簡便、功能豐富,逐漸向第三代智能機器人發展,其主要特點有:動作穩定和提高搬運準確性 。改善工人勞作條件,擺脫有毒、有害環境。定位準確,保證批量一致性 。提高生產效率,解放繁重體力勞動,實現“人”或 “少人”生產 。 柔性高、適應性強,可實現多形狀、不規則物料搬運 。降低制造成本,提高生產效益。從結構形式上看,搬運機器人可分為 龍門式搬運機器人、懸臂式搬運機器人、側壁式搬運機器人、擺臂式搬運機器人和關節式搬運機器人 。

搬運工業機器人
(1)、龍門式搬運機器人
其坐標系主要由 X 軸、 Y 軸和 Z 軸組成。其多采用模塊化結構,可依據負重噸位搬運,采用直角坐標系,編程方便快捷, 廣泛運用于生產線轉運及機床上下料等大批量生產過程。
(2)、懸臂式搬運機器人
其坐標系主要由 X 軸、 Y 軸和 Z 軸組成。其也可隨不同的應用采取相應的結構形式 。廣泛運用于臥式機床、立式機床及特定機床內部和沖壓機熱處理機床自動上下料。
(3)、側壁式搬運機器人
其坐標系主要由 X 軸、 Y 軸和 Z 軸組成。其也可隨不同的應用采取相應的結構形式。主要運用于立體庫類,如檔案自動存取、全自動銀行保管箱存取系統等。
(4)、擺臂式搬運機器人
其坐標系主要由 X 軸、 Y 軸和 Z 軸組成。 Z 軸主要是升降,也稱為主軸。 Y軸的移動主要通過外加滑軌, X 軸末端連接控制器,其繞 X 軸的轉動,實現 4軸聯動。 廣泛應用于國內外生產廠家,是關節式機器人的理想替代品,但其負載程度相對于關節式機器人小。
懸臂式搬運機器人
(5)、 關節式搬運機器人
關節式搬運機器人是當今工業產業中常見的機型之一,其擁有 5~6 個軸,行為動作類似于人的手臂,具有結構緊湊、占地空間小、相對工作空間大、自由度高等特點,適合于幾乎任何軌跡或角度的工作。
由以上可知,搬運機器人是一個完整系統。以關節式搬運機器人為例,其工作站主要有 操作機、控制系統、搬運系統(氣體發生裝置、真空發生裝置和手爪等)和安全保護裝置組成。結構如下圖所示。
搬運機器人系統組成
第三大類為碼垛機器人
碼垛機器人在啤酒、飲料產業,可以實現碼垛自動化 因此得到了廣泛的應用。碼垛機器人具有作業高效、碼垛穩定等優點,解放工人繁重體力勞動,已在各個行業的包裝物流線中發揮強大作用。其主要優點有很多方面,比如提高生產效率,解放繁重體力勞 ;柔性高、適應性強現不同物料碼垛 ;改善工人勞動條件,擺脫有毒和有害環境 ;定位準確,穩定性高 等很多優點 。
第四大類是工業涂裝機器人
涂裝機器人作為一種典型的涂裝自動化裝備,涂裝機器人與傳統的機械涂裝相比,其下優點有以下幾個方面第一是能夠最大限度提高涂料的利用率、降低涂裝過程中的 VOC (有害揮發性有機物)排放量;第二是能顯著提高噴槍的運動速度,縮短生產節拍,效率顯著高于傳統的機械涂裝; 第三是柔性強,能夠適應于多品種、小批量的涂裝任務能夠精確保證涂裝工藝的一致性,獲得較高質量的涂裝產品 。涂裝機器人大多數從構型上仍采取與通用工業機器人相似的 5 或6自由度串聯關節式機器人,在其末端加裝自動噴槍,按照手腕構型劃分,涂裝機器人主要有:球型手腕涂裝機器人和非球型手腕涂裝機器人。

非球型手腕涂裝機器人
第五大類是裝配機器人
裝配機器人是工業生產中用于裝配生產線上對零件或部件進行裝配的一類工業機器人。作為柔性自動化裝配的核心設備具有精度高、工作穩定、柔 順性好、動作迅速等優點。裝配機器人在不同裝配生產線上發揮著強大的裝配作用,裝配機器人大多由 4-6 軸組成,就目前市場上常見的裝配機器人,以臂部運動形式分 直角式裝配機器人和關節式裝配機器人, 關節式裝配機器人亦分水平串聯關節式、垂直串聯關節式和并聯關節式。

并聯裝配機器人
水平串聯式裝配機器人 亦稱為平面關節型裝配機器人或SCARA機器人,是目前裝配生產線上應用數量最多的一類裝配機器人。它屬于精密型裝配機器人,具有速度快、精度高、柔性好等特點,驅動多為交流伺服電機,保證其較高的重復定位精度,廣泛運用于電子、機械和輕工業等有關產品的裝配,適合工廠柔性化生產需求。
來源:互聯網


![java url 本地文件是否存在_我的應用程序知道URL中是否存在文件會一直停止[重復]...](http://pic.xiahunao.cn/java url 本地文件是否存在_我的應用程序知道URL中是否存在文件會一直停止[重復]...)





原理及Python實現...)
)
)

)


成員內部類)



