簡明自動控制——為什么特征方程如此重要。
熱場視頻:
自平衡桿-雙軸反作用輪倒立擺_嗶哩嗶哩 (゜-゜)つロ 干杯~-bilibili?www.bilibili.com



文章結構:前序->一言以蔽之->建模->時域分析->Z變換->后記
解決問題:啥是自控?怎么建模?怎么分析?
如果中間不想看,請看一下后記部分吧!
前序
自動控制,簡短截說:
- 要讓家里的室燈的關和開隨著日起日落自動變化,上自動控制,你看,自動控制是把曾經需要人觀察然后調整到合適的事情讓機器自己調整,自動運行起來,這種粗活的去人化;
- 一個電機帶動履帶旋轉運送東西,眾所周知,當運送的東西很重時,由于摩擦力會阻滯電機的轉動,從而可能造成轉速下降,如何讓電機在不同負載時保持同一個轉速,上自動控制,你看,自動控制就是人給一個設定值(比如轉速、溫度、角度等)然后就不用管了,機器會穩定的執行到達你的設定值,無論它受到什么阻礙;
- 以前,所有的船需要拋瞄從而在茫茫大洋中留在原地,現在的一些船,通過GPS獲取自己的位置,如果船向東偏了,船上的動力會自動的將船向西挪挪使之保持在原地;
- 發射一個導彈,無論是在什么地方發射的,在深遠的內陸,亦或在海上、海內和空中,都可以命中目標,因為自動控制,設定目標,導彈自己會到達目標。
以上是一些簡化的描述,從以上的過程總結一下有哪些共同之處,一個能夠自動控制的系統,都需要設定值,都需要獲取要控制的量的實時值(對于電機,要控制的量就是電機轉速,對于船,要控制的量就是位置,對于導彈,要控制的量就是飛行方向),以及一些機制或者算法,讓要控制的量去自動的跟蹤設定值。所謂去人化,就是這一個個機器實現了自動化。
《自動控制原理》和《現代控制理論》這兩本書,我完整的翻了不下好幾遍。
首先就基礎的這本《自動控制原理》而言,一上來,舉例和定義很抽象,然后講系統的分類,后面滿書就是純數學的東西,直接地說,這就不是給初學者看的書,這是適合已經有基礎來鞏固深化的書;看完之后有的人會說,我理解和尊重科學知識用到了生產生活里面,但我不知道具體是怎么用的,這些書,讓我感覺尬尬的。
這本書分為三塊,線性連續系統、線性離散系統和非線性系統。離散系統與連續很類似,本文后面只講時域到離散域轉化的一種直觀方法;非線性分析部分很基礎,如果會了連續系統分析這部分就能看。
本文的目的,就是先不要看書,看我這篇,然后再去看書,被概念絆住,被方法卡主,被找不著方向的幾率小很多。(PS.但當我寫完本文回頭來看,概念和數學介紹起來不是那么簡單)
這期是水一期,我從頭到尾給你講一下,傳遞函數中的特征方程為啥那么重要,這只是自控的自洽完備的理論體系里面的一小點,且在這里碎片化的提一下,給個印象,不是高效的系統性總結,所以是水一期。
傳統藝能,一言以蔽之
這里放個圖:控制系統抽象出的結構框圖(圓叉符號表示加和,控制器的描述為A(理解為放大倍數,增益或者一個函數)被控對象的描述這里暫定為1)
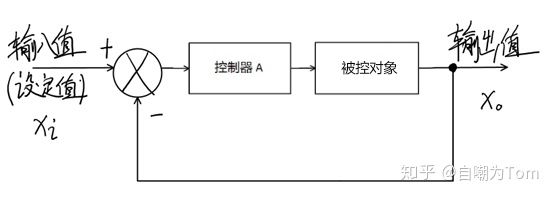
可以用公式寫一下:
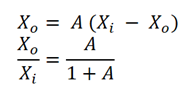
自動控制原理這門課,所要解決的最內核的問題,就是設計中間的那個控制器的內部算法,讓輸出能夠且更好的跟蹤輸入。
要想研究,就先量化,要想量化,先定指標。
指標的概念
再看一個圖,觀察。這是兩根隨時間變化的曲線,一個是上圖中系統的輸入值Xi(虛線),另一個是系統的輸出值Xo(實線)。
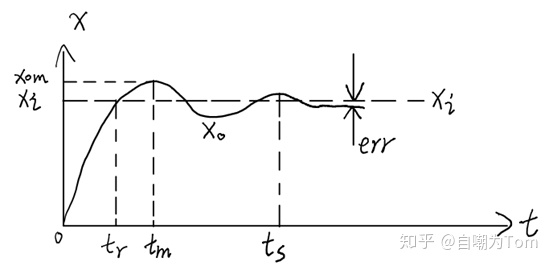
評判自控系統“優劣”的三個指標:
穩定性:輸出能否跟蹤輸入,以及跟蹤過程中變化的幅度;
準確性:輸出能跟蹤輸入并且穩定后,兩者之間的差是多少;
快速性:輸出跟蹤輸入時,輸出由開始到跟上,用的時間是多少。
具體量化指標即:
穩定性:穩定判據;超調量δ = (Xom - Xi)/Xi;
準確性:err(圖中的穩態誤差);
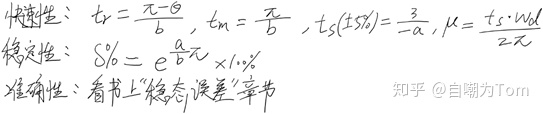
快速性:tr(上升時間),tm(峰值時間),ts(調節時間)以及振蕩次數μ。
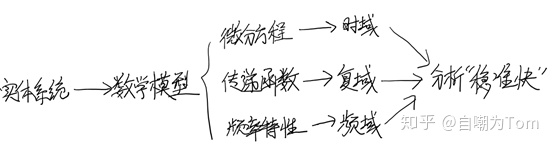
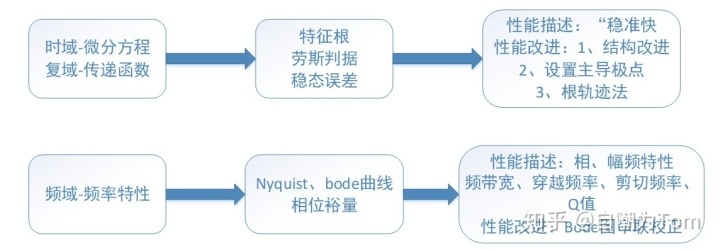
總結:把一個實體系統,建立微分方程、傳遞函數和頻率特性的數學模型,分別在時域、復域和頻域三個“維度”,評價這個系統的“穩準快”性能,這本書說完了。目的就是得到“穩準快”這三個指標,初學到此足夠。
這三個“維度”,就是三條路,都可以到達目的地,走哪一條都可以,區別就是對于不同的系統和目的,三條路的重要性和難易程度不同。
這本書
這本書:建立數學模型->微分方程的時域分析->傳遞函數的復域分析->頻率特性的頻域分析,然后簡單介紹一下離散系統和非線性系統的一般計算方法,沒了就這些。
建立數學模型
基本模型:電容,電感。
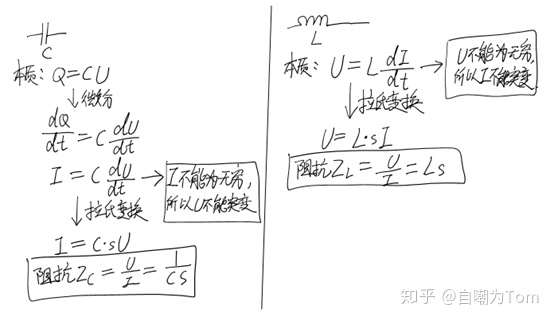
為了把微分方程寫成傳遞函數,去掉零初始值,經過拉普拉斯變換,寫成輸出比上輸入的形式。一次微分當成s,兩次微分當成s^2,一次積分當成1/s,依次類推,怎么來的,拉普拉斯變換,降維,把積分微分符號變成乘除,有興趣去推一推。
電路中,可以直接把電容和電感分別寫成阻抗形式,然后就按照普通的歐姆定律計算即可求出該電路的傳遞函數,在給定輸入的情況下,計算出輸出,然后把輸出反拉氏變換,就得到了輸出的時域解,進而畫出時域解的圖像,或者就求導之類的計算“穩準快”。
下面舉一個例子,如何寫出一個系統的微分方程、傳遞函數和頻率特性。
正片開始:分析“穩準快”指標與特征根的關系
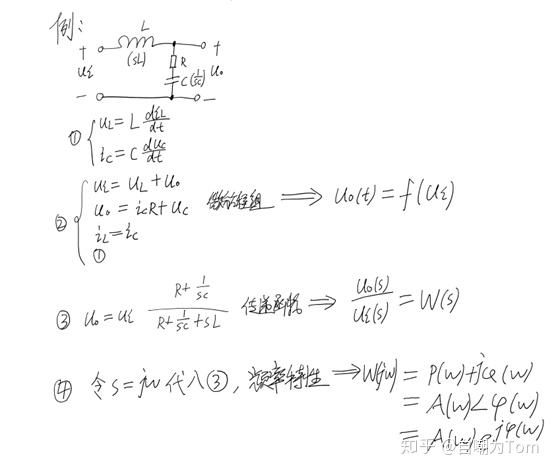
再舉一個例子,看這個電路,這次不但寫數學模型,再求解一下“穩準快”指標。

其微分方程可以寫成如下形式:
再寫傳遞函數,先別管為什么寫,寫出來看看:
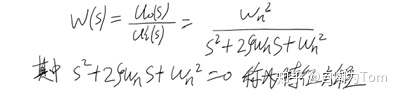
求一下特征方程的跟:
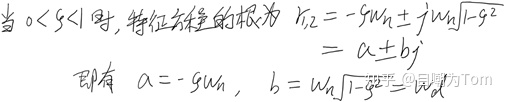
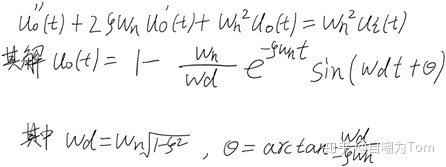
a和b好像與微分方程的解有相同之處(全文點睛),將a和b帶入看看:
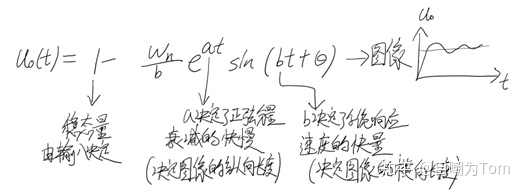
“穩準快”的具體公式:
所以你看,特征方程的跟a+bj決定了系統的“穩準快”指標,即系統動態響應過程與特征跟在復平面的位置有關。對于高階系統,同樣適用。
更形象的理解,看上面的輸出公式Uo(t);a是負數,a如果變大,則Uo(t)的圖像曲線會更加“陡”,如果a變小,曲線會溫和平靜一些,a是管“縱向”幅度的;b在正弦函數里,b變大,曲線會被往右“拉長”,反之同理,b是管“橫向”拉伸的。一縱一橫,這輸出量的圖像基本就確定了。
自控原理總結
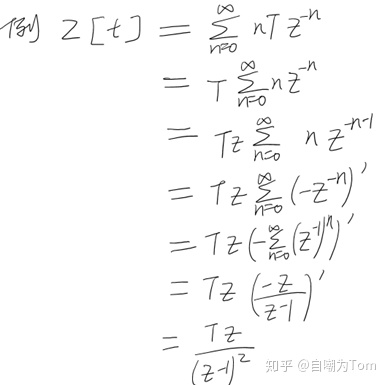
Z變換一般方法簡析

下面給出一個例子:
后記
1、上面對系統進行建模的環節都是拿電路舉例,只是舉例,這種數學建模思想可以直接平移用到其他系統。
2、說了那么多,那通過數學推導出的控制器,該怎么轉變為軟件算法呢。相比于實體控制器,這樣的好處是控制算法容易修改,容易維護和部署,但缺點是速度可能比實際電路運行的慢些,考慮一下性價比。計算機是離散的,如無處不在的律動,只需把連續傳函變為離散傳函即可。
3、控制器花樣繁多,學自動化或者自動控制,不可不了解的一種,那就是PID,現在工業現場的控制任務,這種算法用的最多,改進型的PID,也多達二十多種,易讀易用。
4、讓更多的人真正理解這門課的內涵和意義,本篇文字也是簡單打一個樣子,許多科目本來相當實用和有意思,我想傳達這種精神,各位,吃喝玩樂很有意思,因為那些本身就是為了讓人感覺好的,但是如果讓難的事物,讓更有價值的事物在保持能夠給人加價的同時,也能變得有意思,這是現代社會的一種內核趨勢。
5、說句題外話:我看模電,一次看的電子科大的慕課,并按照每一節知識點作筆記,然后重新梳理筆記,對于BJT,最后我總結的學習路線是由概念到等效模型,到偏置電路及其意義,再到放大電路和三種接法,最后到頻率特性,可是視頻課程的安排卻是概念(上),偏置電路,概念(下),等效模型,放大電路,三種接法第一種,頻率特征,三種接法后兩種。我覺得我是按照正常人理解的順序整理的,而視頻的講解順序有點打亂的感覺,模電原課本更加抽象和厚重,讓我覺得不光是考試的時候篩選人才,在這種環境里,其學習的過程都是在篩選。想起很久以前聽的一個事,就是日本在其國注冊了一些專利,由于產業需要,也要在中國注冊這些的專利,給我們看日本的專利文件,念起來是一句話,但句子又長又難懂,東扯西扯,可能是翻譯的緣故,但更可能的就是人家故意寫的晦澀一些。
在制造技術壁壘上理所當然,但是在學習知識上,有種“我好不容易學得的,你想學也得給我難一些”,可能為人師表的不是這種心理,但是我有權利也有理由懷疑。
6、平衡車,平衡自行車,二階倒立擺,旋轉倒立擺等“神奇”的事物,都是經典和現代控制理論最直接典型的應用,生活中無處不在。應用現代控制理論建模,列狀態方程,仿真和實現,現今其實缺乏這種一整套的從無到有的全過程體驗和訓練。
(over)
等方式接入Internet。...)
一種納米硅質絕熱材料及其制備方法...)












:構建settings app項目目錄)




