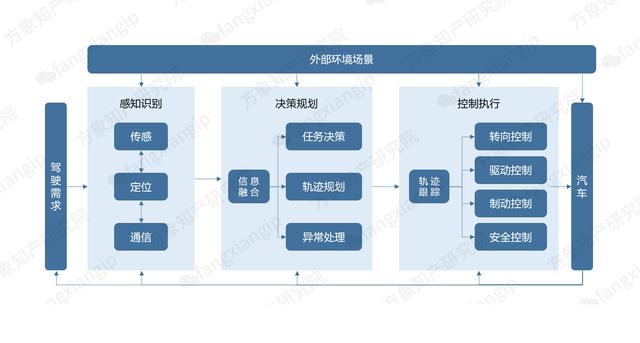
自動駕駛技術的本質是用機器視角去模擬人類駕駛員的行為,其技術框架可以分為三個環節:感知層、決策層 和執行層,具體涉及傳感器、計算平臺、算法、高精度地圖、OS、HMI等 多個技術模塊。
目前自動駕駛L3商業化技術已經成熟,L4級/L5級加速發展進入驗證試點階段。本文將為大家科普下目前自動駕駛汽車所要涉及哪些核心技術,到底離真正商用落地,技術上還需要哪些升級。
1
識別技術
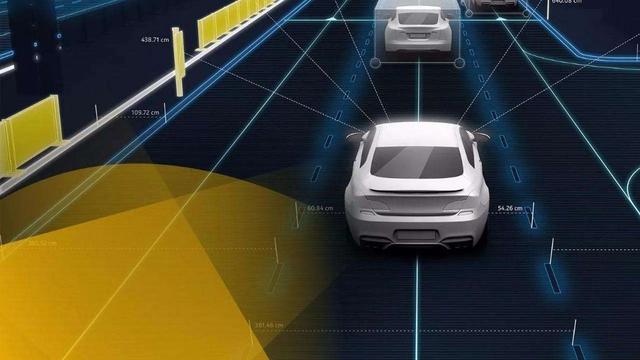
和人類的眼睛一樣,這個輪式機器人也有它自己的眼睛,用來識別周邊的車輛、障礙物、行人等路上的情況。
我們眼睛的主要構成部分是眼球,通過調節晶狀體的彎曲程度來改變晶狀體焦距來獲得實像。那自動駕駛的眼睛是由什么構成的呢?答案是傳感器。包括攝像頭、激光雷達、毫米波雷達,還有紅外線、超聲波雷達等。
你可能會驚訝,需要這么多眼睛?沒錯,它是長滿了眼睛的小怪獸,通常擁有10+只眼睛。
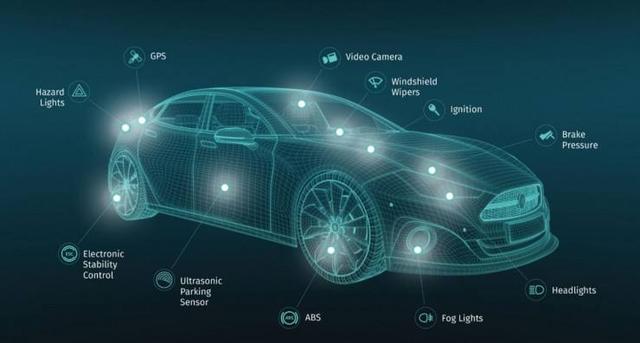
其中,最常用的是攝像頭,幾乎是毫無爭議地被所有開發者采用。它和人類的眼睛最接近,可以看清有顏色的標識、物體,看得懂字體,分得清紅綠燈。但是缺點也不少,比如在夜晚或惡劣的天氣下視力就嚴重下降,也不擅長遠距離觀察。
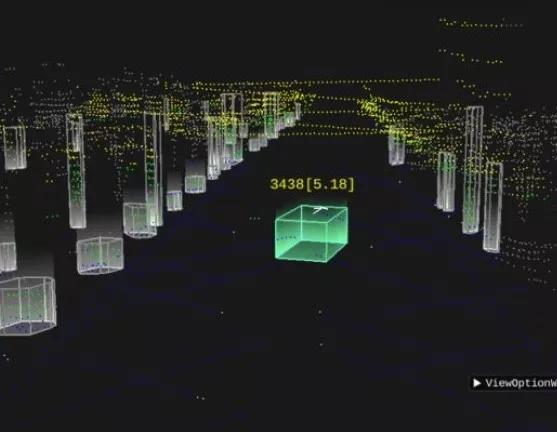
其次是頗富爭議的LiDAR,即激光雷達。比較常見的是在車頂,像是頂不停旋轉的帽子。原理很簡單,就是通過計算激光束的反射時間和波長,可以完成繪制周邊障礙物的3D圖。而短板則是無法識別圖像和顏色。
毫米波雷達也不得不提一提,因為它的全能--可以全天候工作,這使得它不可或缺,即便它無法識別高度,分辨率不高,也難以成像。但它憑借其穿透塵霧、雨雪的硬本領,站穩一席之地。
可以通過下面這個性能對比表格,了解主流傳感器的優勢和軟肋。
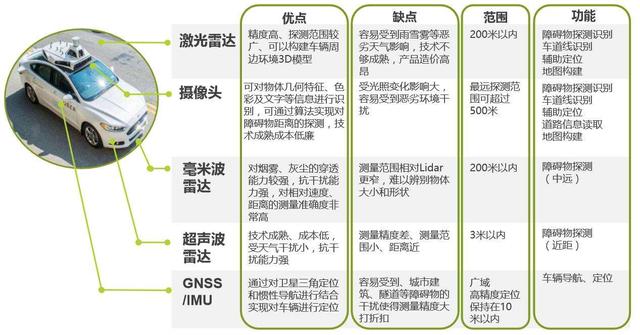
如此多各式各樣的眼睛,那她的視力一定很好咯?那也未必。你以為星多天空亮,可它們之間能夠互補還好,但也難免會產生矛盾。這么多只眼睛你要優先選擇相信誰,這也是一個課題叫Sensor Fusion,傳感器融合。根據每種傳感器的優缺點來綜合評判信息的準確度,得到更可靠的最終結果。傳感器融合的另一個優點是,換來一定程度的冗余,即便某只眼睛暫時失明,也不會影響它安全前行。
2
決策技術
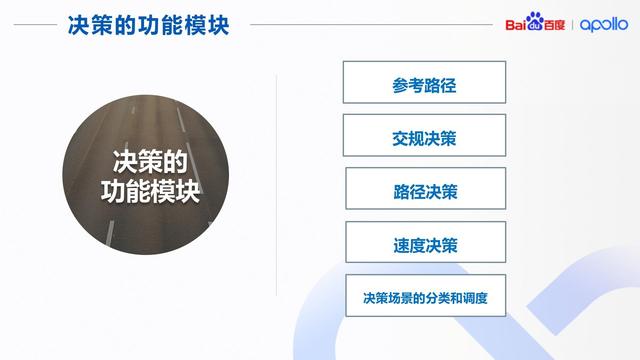
通過眼睛識別得到了周邊環境,接下來就要充分利用這些信息進行理解分析,決定自己該如何走下一步。要完成這項任務的就是最強大腦。
跟人類的大腦一樣,我們不是天生就會開車,也不是拿到駕照就成老司機了。需要一定的知識積累,自動駕駛機器人也同樣需要。完成大腦中的知識庫有兩種方式:專家規則式和AI式。
專家規則式,英文叫rule-based。即提前編寫好規則,當需要做決定的時候必須嚴格遵守這些規則。舉個栗子,當準備超車變道時,需要滿足以下條件(這是一個假專家,僅供參考):道路半徑大于500R(彎道不變道);跟目標車道上的前后車的距離都在20m以上;比后車的車速慢不超過5km/h;等等等等...以上N個條件同時滿足時,即可超車變道。
AI式,就是一直很火的人工智能Artificial Intelligence。模仿人類的大腦,通過AI算法對場景進行理解。或提前通過大量的犯錯積累經驗,或事前聽某人指點江山。通過AI式積累知識庫,會讓她的反應更加靈活。專家也難免有疏忽,更何況交通瞬息萬變,沒有靈活的大腦如何應對我大中華的路況呢?
3
定位技術
只有知道自己在哪里,才知道自己去哪里。目前自動駕駛的技術基本上都源自機器人,自動駕駛可以看做是輪式機器人加一個舒適的沙發。機器人系統中定位和路徑規劃是一個問題,沒有定位,就無法規劃路徑。厘米級實時定位是目前自動駕駛最大的挑戰之一。對機器人系統來說,定位主要靠SLAM與先驗地圖(Prior Map)的交叉對比。SLAM是Simultaneous Localization and Mapping的縮寫,意為“同時定位與建圖”。它是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程。目前,SLAM的應用領域主要有機器人、虛擬現實和增強現實。其用途包括傳感器自身的定位,以及后續的路徑規劃、場景理解。
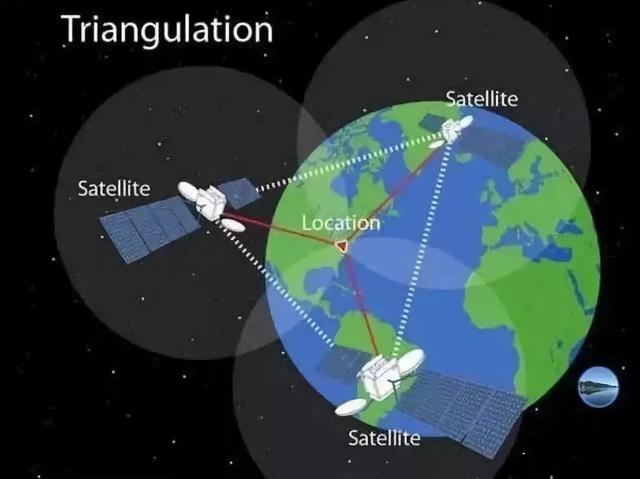
機器人定位常見三大類,相對定位,絕對定位和組合定位。 自動駕駛一般用組合定位,首先本體感受傳感器如里程計(Odometry)、陀螺儀(Gyroscopes)等,通過給定初始位姿,來測量相對于機器人初始位姿的距離和方向來確定當前機器人的位姿,也叫做航跡推測。然后用激光雷達或視覺感知環境,用主動或被動標識、地圖匹配、GPS、或導航信標進行定位。位置的計算方法包括有三角測量法、三邊測量法和模型匹配算法等。從這個角度而言,IMU也是自動駕駛必備的部件。
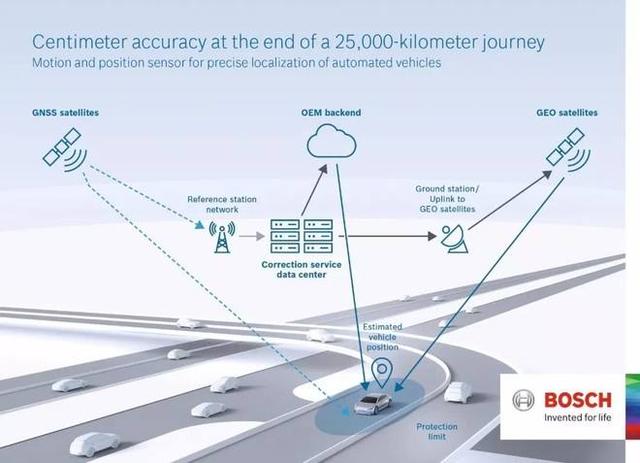
現今,除了主流的用GPS或GNSS(全球衛星導航系統)來定位的方式之外,也有在公路上鋪設電磁誘導線等方式來實現定位。高精度GPS定位目前來說最大難題是,山區和隧道等地理因素對精度的影響,雖然可以依靠IMU(慣性測量單元)來進行推算,但GPS丟失信號時間過長的話,累計的誤差就會比較大。
另外,自動駕駛專用的3D動態高清地圖帶給了自動駕駛更多可能性。因為有了高清地圖,就可以將自己的位置輕松定位在車道上。
4
通信安全技術
試想如果被黑客入侵,控制了你的自動駕駛車,不僅可以監聽到你的秘密談話,還很可能成為殺人工具。黑客可以通過影響傳感器的數據而影響決策,或直接介入判斷機制進而影響行駛軌道,
像GPS、攝像頭、激光雷達、毫米波雷達、IMU等常見傳感器裝置,都可以被黑客干擾進而影響自動駕駛的判斷機制和行駛軌道。比如攻擊激光雷達讓其辨別不了即時性不良數據,或者是試著干擾他們長期積累的聚合數據等等。
V2X是車輛與基礎設施之間(例如車輛之間、車輛與行人之間、車輛與交通基礎設施之間)所有通信的通用術語。 V2X包含有關汽車及其用戶的個人信息,因此用戶身份驗證和數據加密系統至關重要。
V2X包含了汽車和我們的個人信息,因此在通信的時候對用戶的身份驗證和給數據加密,這些都必不可少。

5
人機交互技術
雖說我們對自動駕駛的印象大多是,不需要人們的干涉,它就能把我們送到任何想去的地方。但是很遺憾,目前的自動駕駛系統還做不到這一點。
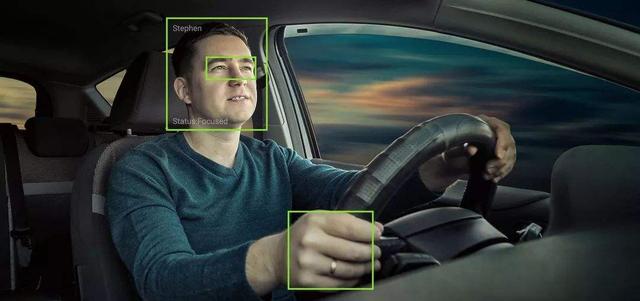
遇到自動駕駛駕馭不了的場景,便會呼喚你接替它的工作。這時,HMI(人機界面)就發揮作用了。它的目標是,用最直觀最便捷的方式通知我們,讓駕駛員盡快注意到。
此外,通過觀察分析駕駛員的面部表情和動作,判斷其困倦狀態,并通過給駕駛員提供感興趣的話題等方式予以提醒,也是人機交互多樣化發展的一個例子。還有些不僅局限于和車內人的互動,也可以與路上行人進行互動,表達讓行等意愿。
6
高精度地圖
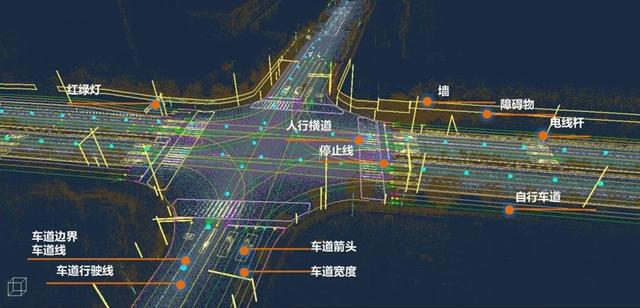
高精度地圖是實現自動駕駛的必要條件嗎?——Level3及以上是必選項。基于美國SAE協會對自動駕駛技術等級的劃分,在Level2以下的輔助駕駛階段(ADAS階段),高精度地圖對整個輔助駕駛系統來說是一個可選項。當自動駕駛技術發展到 Level3及以上時,要求車輛在高速公路、停車場泊車等特殊場景中實現自動駕駛,高精度地圖的重要性開始凸顯。業內公認要想實現 Level3 級別的自動駕駛,高精度地圖將成為必選項。
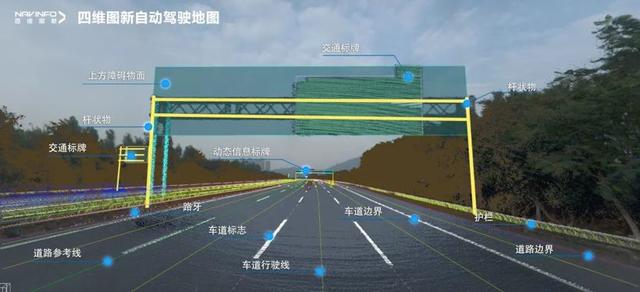
1)靜態數據是指高精度地圖需要將道路基本形態(車道線等數據),通過地圖或矢量數據來正確表達出來。在靜態高精地圖模型中,車道要素模型包括車道中心線、車道邊界線、參考點、虛擬連接線等;
2)動態數據是指天氣、地理環境、道路交通、自車狀態等需要動態更新的數據。通過靜態數據和動態數據的疊加,高精度地圖將最終實現對于自動駕駛的環境建模。
7
5G/V2X技術
車聯網 V2X就是把車連到網或者把車連成網, 包括汽車對汽車(V2V)、汽車對基礎設施(V2I)、汽車對互聯網(V2N)和汽車對行人(V2P)。
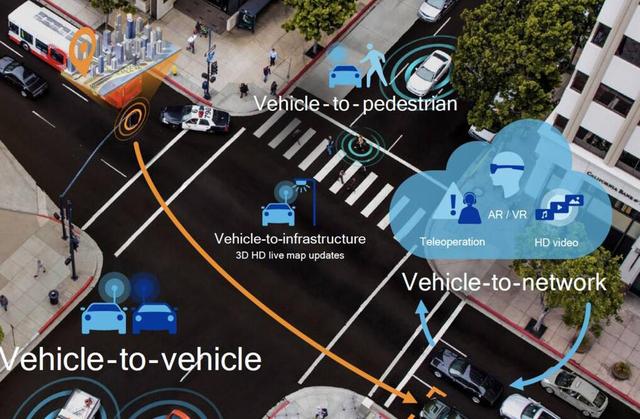
通過 V2X 網絡,相當于自動駕駛打通外部“大腦”,提供了豐富、及時的“外部信息”輸入,能夠有效彌補單車智能的感知盲點。可以說,V2X是自動駕駛加速劑,能夠有效補充單車智能 的技術、加速反應效率。5G 網絡具備低時延、高吞吐、高可靠的特性,大大提升了V2X傳 輸信息的豐富性和及時性,也提高了 V2X傳感器的技術價值。

)





課程筆記索引)









 Shell操作HDFS文件系統-中)

