1)實驗平臺:正點原子Linux開發板
2)摘自《正點原子I.MX6U嵌入式Linux驅動開發指南》
關注官方微信號公眾號,獲取更多資料:正點原子
文件bsp_spi.c中有兩個函數:spi_init和spich0_readwrite_byte,函數spi_init是SPI初始化函數,此函數會初始化SPI的時鐘,通道等。函數spich0_readwrite_byte是SPI收發函數,通過此函數即可完成SPI的全雙工數據收發。
接下來在文件bsp_icm20608.h中輸入如下內容:
示例代碼27.3.3 bsp_icm20608.h文件代碼
1 #ifndef _BSP_ICM20608_H
2 #define _BSP_ICM20608_H
3/***************************************************************
4 Copyright ? zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
5 文件名 : bsp_icm20608.h
6 作者 : 左忠凱
7 版本 : V1.0
8 描述 : ICM20608驅動文件。
9 其他 : 無
10 論壇 : www.openedv.com
11 日志 : 初版V1.0 2019/3/26 左忠凱創建
12 ***************************************************************/
13 #include "imx6ul.h"
14 #include "bsp_gpio.h"
15
16/* SPI片選信號 */
17 #define ICM20608_CSN(n)(n ? gpio_pinwrite(GPIO1,20,1):
gpio_pinwrite(GPIO1,20,0))
18
19 #define ICM20608G_ID 0XAF/* ID值 */
20 #define ICM20608D_ID 0XAE/* ID值 */
21
22/* ICM20608寄存器
23 *復位后所有寄存器地址都為0,除了
24 *Register 107(0X6B) Power Management 1 = 0x40
25 *Register 117(0X75) WHO_AM_I = 0xAF或者0xAE
26 */
27/* 陀螺儀和加速度自測(出產時設置,用于與用戶的自檢輸出值比較) */
28 #define ICM20_SELF_TEST_X_GYRO 0x00
29 #define ICM20_SELF_TEST_Y_GYRO 0x01
30 #define ICM20_SELF_TEST_Z_GYRO 0x02
31 #define ICM20_SELF_TEST_X_ACCEL 0x0D
32 #define ICM20_SELF_TEST_Y_ACCEL 0x0E
33 #define ICM20_SELF_TEST_Z_ACCEL 0x0F
34/***********省略掉其他宏定義*************/
35 #define ICM20_ZA_OFFSET_H 0x7D
36 #define ICM20_ZA_OFFSET_L 0x7E
37
38/*
39 * ICM20608結構體
40 */
41struct icm20608_dev_struc
42{
43 signedint gyro_x_adc; /* 陀螺儀X軸原始值 */
44 signedint gyro_y_adc; /* 陀螺儀Y軸原始值 */
45 signedint gyro_z_adc; /* 陀螺儀Z軸原始值 */
46 signedint accel_x_adc; /* 加速度計X軸原始值 */
47 signedint accel_y_adc; /* 加速度計Y軸原始值 */
48 signedint accel_z_adc; /* 加速度計Z軸原始值 */
49 signedint temp_adc; /* 溫度原始值 */
50
51 /* 下面是計算得到的實際值,擴大100倍 */
52 signedint gyro_x_act; /* 陀螺儀X軸實際值 */
53 signedint gyro_y_act; /* 陀螺儀Y軸實際值 */
54 signedint gyro_z_act; /* 陀螺儀Z軸實際值 */
55 signedint accel_x_act; /* 加速度計X軸實際值 */
56 signedint accel_y_act; /* 加速度計Y軸實際值 */
57 signedint accel_z_act; /* 加速度計Z軸實際值 */
58 signedint temp_act; /* 溫度實際值 */
59};
60
61struct icm20608_dev_struc icm20608_dev;/* icm20608設備 */
62
63/* 函數聲明 */
64unsignedchar icm20608_init(void);
65void icm20608_write_reg(unsignedchar reg,unsignedchar value);
66unsignedchar icm20608_read_reg(unsignedchar reg);
67void icm20608_read_len(unsignedchar reg,unsignedchar*buf,
unsignedchar len);
68void icm20608_getdata(void);
69 #endif
文件bsp_icm20608.h里面先定義了一個宏ICM20608_CSN,這個是ICM20608的SPI片選引腳。接下來定義了一些ICM20608的ID和寄存器地址。第41行定義了一個結構體icm20608_dev_struc,這個結構體是ICM20608的設備結構體,里面的成員變量用來保存ICM20608的原始數據值和經過轉換得到的實際值。實際值是有小數的,本章例程取兩位小數,為了方便計算,實際值擴大了100倍,這樣實際值就是整數了,但是在使用的時候要除100重新得到小數部分。最后就是一些函數聲明,接下來在文件bsp_icm20608.c中輸入如下所示內容:
示例代碼27.3.4 bsp_icm20608.c文件代碼
/***************************************************************
Copyright ? zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名 : bsp_icm20608.c
作者 : 左忠凱
版本 : V1.0
描述 : ICM20608驅動文件。
其他 : 無
論壇 : www.openedv.com
日志 : 初版V1.0 2019/3/26 左忠凱創建
***************************************************************/
1 #include "bsp_icm20608.h"
2 #include "bsp_delay.h"
3 #include "bsp_spi.h"
4 #include "stdio.h"
5
6struct icm20608_dev_struc icm20608_dev;/* icm20608設備 */
7
8/*
9 * @description : 初始化ICM20608
10 * @param : 無
11 * @return : 0 初始化成功,其他值初始化失敗
12 */
13unsignedchar icm20608_init(void)
14{
15unsignedchar regvalue;
16 gpio_pin_config_t cs_config;
17
18/* 1、ESPI3 IO初始化
19 * ECSPI3_SCLK -> UART2_RXD
20 * ECSPI3_MISO -> UART2_RTS
21 * ECSPI3_MOSI -> UART2_CTS
22 */
23 IOMUXC_SetPinMux(IOMUXC_UART2_RX_DATA_ECSPI3_SCLK,0);
24 IOMUXC_SetPinMux(IOMUXC_UART2_CTS_B_ECSPI3_MOSI,0);
25 IOMUXC_SetPinMux(IOMUXC_UART2_RTS_B_ECSPI3_MISO,0);
26 IOMUXC_SetPinConfig(IOMUXC_UART2_RX_DATA_ECSPI3_SCLK,0x10B1);
27 IOMUXC_SetPinConfig(IOMUXC_UART2_CTS_B_ECSPI3_MOSI,0x10B1);
28 IOMUXC_SetPinConfig(IOMUXC_UART2_RTS_B_ECSPI3_MISO,0x10B1);
29
30/* 初始化片選引腳 */
31 IOMUXC_SetPinMux(IOMUXC_UART2_TX_DATA_GPIO1_IO20,0);
32 IOMUXC_SetPinConfig(IOMUXC_UART2_TX_DATA_GPIO1_IO20,0X10B0);
33 cs_config.direction = kGPIO_DigitalOutput;
34 cs_config.outputLogic =0;
35 gpio_init(GPIO1,20,&cs_config);
36
37/* 2、初始化SPI */
38 spi_init(ECSPI3);
39
40 icm20608_write_reg(ICM20_PWR_MGMT_1,0x80);/* 復位 */
41 delayms(50);
42 icm20608_write_reg(ICM20_PWR_MGMT_1,0x01);/* 關閉睡眠 */
43 delayms(50);
44
45 regvalue = icm20608_read_reg(ICM20_WHO_AM_I);
46 printf("icm20608 id = %#X", regvalue);
47if(regvalue != ICM20608G_ID && regvalue != ICM20608D_ID)
48return1;
49
50 icm20608_write_reg(ICM20_SMPLRT_DIV,0x00); /* 輸出速率設置 */
51 icm20608_write_reg(ICM20_GYRO_CONFIG,0x18);/* 陀螺儀±2000dps */
52 icm20608_write_reg(ICM20_ACCEL_CONFIG,0x18);/* 加速度計±16G */
53 icm20608_write_reg(ICM20_CONFIG,0x04);/* 陀螺BW=20Hz */
54 icm20608_write_reg(ICM20_ACCEL_CONFIG2,0x04);
55 icm20608_write_reg(ICM20_PWR_MGMT_2,0x00);/* 打開所有軸 */
56 icm20608_write_reg(ICM20_LP_MODE_CFG,0x00);/* 關閉低功耗 */
57 icm20608_write_reg(ICM20_FIFO_EN,0x00); /* 關閉FIFO */
58return0;
59}
60
61/*
62 * @description : 寫ICM20608指定寄存器
63 * @param - reg : 要讀取的寄存器地址
64 * @param – value : 要寫入的值
65 * @return : 無
66 */
67void icm20608_write_reg(unsignedchar reg,unsignedchar value)
68{
69/* ICM20608在使用SPI接口的時候寄存器地址只有低7位有效,
70 * 寄存器地址最高位是讀/寫標志位,讀的時候要為1,寫的時候要為0。
71 */
72 reg &=~0X80;
73
74 ICM20608_CSN(0); /* 使能SPI傳輸 */
75 spich0_readwrite_byte(ECSPI3, reg); /* 發送寄存器地址 */
76 spich0_readwrite_byte(ECSPI3, value); /* 發送要寫入的值 */
77 ICM20608_CSN(1); /* 禁止SPI傳輸 */
78}
79
80/*
81 * @description : 讀取ICM20608寄存器值
82 * @param - reg : 要讀取的寄存器地址
83 * @return : 讀取到的寄存器值
84 */
85unsignedchar icm20608_read_reg(unsignedchar reg)
86{
87unsignedchar reg_val;
88
89/* ICM20608在使用SPI接口的時候寄存器地址只有低7位有效,
90 * 寄存器地址最高位是讀/寫標志位,讀的時候要為1,寫的時候要為0。
91 */
92 reg |=0x80;
93
94 ICM20608_CSN(0); /* 使能SPI傳輸 */
95 spich0_readwrite_byte(ECSPI3, reg); /* 發送寄存器地址 */
96 reg_val = spich0_readwrite_byte(ECSPI3,0XFF);/* 讀取寄存器的值*/
97 ICM20608_CSN(1); /* 禁止SPI傳輸 */
98return(reg_val); /* 返回讀取到的寄存器值 */
99}
100
101/*
102 * @description : 讀取ICM20608連續多個寄存器
103 * @param - reg : 要讀取的寄存器地址
104 * @return : 讀取到的寄存器值
105 */
106void icm20608_read_len(unsignedchar reg,unsignedchar*buf,
unsignedchar len)
107{
108unsignedchar i;
109
110/* ICM20608在使用SPI接口的時候寄存器地址,只有低7位有效,
111 * 寄存器地址最高位是讀/寫標志位讀的時候要為1,寫的時候要為0。
112 */
113 reg |=0x80;
114
115 ICM20608_CSN(0);/* 使能SPI傳輸 */
116 spich0_readwrite_byte(ECSPI3, reg);/* 發送寄存器地址 */
117for(i =0; i < len; i++)/* 順序讀取寄存器的值 */
118{
119 buf[i]= spich0_readwrite_byte(ECSPI3,0XFF);
120}
121 ICM20608_CSN(1);/* 禁止SPI傳輸 */
122}
123
124/*
125 * @description : 獲取陀螺儀的分辨率
126 * @param : 無
127 * @return : 獲取到的分辨率
128 */
129float icm20608_gyro_scaleget(void)
130{
131unsignedchar data;
132float gyroscale;
133
134 data =(icm20608_read_reg(ICM20_GYRO_CONFIG)>>3)&0X3;
135switch(data){
136case0:
137 gyroscale =131;
138break;
139case1:
140 gyroscale =65.5;
141break;
142case2:
143 gyroscale =32.8;
144break;
145case3:
146 gyroscale =16.4;
147break;
148}
149return gyroscale;
150}
151
152/*
153 * @description : 獲取加速度計的分辨率
154 * @param : 無
155 * @return : 獲取到的分辨率
156 */
157unsignedshort icm20608_accel_scaleget(void)
158{
159unsignedchar data;
160unsignedshort accelscale;
161
162 data =(icm20608_read_reg(ICM20_ACCEL_CONFIG)>>3)&0X3;
163switch(data){
164case0:
165 accelscale =16384;
166break;
167case1:
168 accelscale =8192;
169break;
170case2:
171 accelscale =4096;
172break;
173case3:
174 accelscale =2048;
175break;
176}
177return accelscale;
178}
179
180/*
181 * @description : 讀取ICM20608的加速度、陀螺儀和溫度原始值
182 * @param : 無
183 * @return : 無
184 */
185void icm20608_getdata(void)
186{
187float gyroscale;
188unsignedshort accescale;
189unsignedchar data[14];
190
191 icm20608_read_len(ICM20_ACCEL_XOUT_H, data,14);
192
193 gyroscale = icm20608_gyro_scaleget();
194 accescale = icm20608_accel_scaleget();
195
196 icm20608_dev.accel_x_adc =(signedshort)((data[0]<<8)|
data[1]);
197 icm20608_dev.accel_y_adc =(signedshort)((data[2]<<8)|
data[3]);
198 icm20608_dev.accel_z_adc =(signedshort)((data[4]<<8)|
data[5]);
199 icm20608_dev.temp_adc =(signedshort)((data[6]<<8)|
data[7]);
200 icm20608_dev.gyro_x_adc =(signedshort)((data[8]<<8)|
data[9]);
201 icm20608_dev.gyro_y_adc =(signedshort)((data[10]<<8)|
data[11]);
202 icm20608_dev.gyro_z_adc =(signedshort)((data[12]<<8)|
data[13]);
203
204/* 計算實際值 */
205 icm20608_dev.gyro_x_act =((float)(icm20608_dev.gyro_x_adc)/
gyroscale)*100;
206 icm20608_dev.gyro_y_act =((float)(icm20608_dev.gyro_y_adc)/
gyroscale)*100;
207 icm20608_dev.gyro_z_act =((float)(icm20608_dev.gyro_z_adc)/
gyroscale)*100;
208 icm20608_dev.accel_x_act =((float)(icm20608_dev.accel_x_adc)/
accescale)*100;
209 icm20608_dev.accel_y_act =((float)(icm20608_dev.accel_y_adc)/
accescale)*100;
210 icm20608_dev.accel_z_act =((float)(icm20608_dev.accel_z_adc)/
accescale)*100;
211 icm20608_dev.temp_act =(((float)(icm20608_dev.temp_adc)-25)/
326.8+25)*100;
212}
文件bsp_imc20608.c是ICM20608的驅動文件,里面有7個函數,我們依次來看一下。第1個函數是icm20608_init,這個是ICM20608的初始化函數,此函數先初始化ICM20608所使用的SPI引腳,將其復用為ECSPI3。因為我們本章的SPI片選采用軟件控制的方式,所以SPI片選引腳設置成了普通的輸出模式。設置完SPI所使用的引腳以后就是調用函數spi_init來初始化SPI3,最后初始化ICM20608,就是配置ICM20608的寄存器。第2個和第3個函數分別是icm20608_write_reg和icm20608_read_reg,這兩個函數分別用于寫/讀ICM20608的指定寄存器。第4個函數是icm20608_read_len,此函數也是讀取ICM20608的寄存器值,但是此函數可以讀取連續多個寄存器的值,一般用于讀取ICM20608傳感器數據。第5和第6個函數分別是icm20608_gyro_scaleget和icm20608_accel_scaleget,這兩個函數分別用于獲取陀螺儀和加速度計的分辨率,因為陀螺儀和加速度的測量范圍設置的不同,其分辨率就不同,所以在計算實際值的時候要根據實際的量程范圍來得到對應的分辨率。最后一個函數是icm20608_getdata,此函數就是用于獲取ICM20608的加速度計、陀螺儀和溫度計的數據,并且會根據設置的測量范圍計算出實際的值,比如加速度的g值、陀螺儀的角速度值和溫度計的溫度值。
最后在main.c中輸入如下內容:
示例代碼27.3.5 main.c文件代碼
/**************************************************************
Copyright ? zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名 : mian.c
作者 : 左忠凱
版本 : V1.0
描述 : I.MX6U開發板裸機實驗19 SPI實驗
其他 : SPI也是最常用的接口,ALPHA開發板上有一個6軸傳感器ICM20608,
這個六軸傳感器就是SPI接口的,本實驗就來學習如何驅動I.MX6U
的SPI接口,并且通過SPI接口讀取ICM20608的數據值。
論壇 : www.openedv.com
日志 : 初版V1.0 2019/1/17 左忠凱創建
**************************************************************/
1 #include "bsp_clk.h"
2 #include "bsp_delay.h"
3 #include "bsp_led.h"
4 #include "bsp_beep.h"
5 #include "bsp_key.h"
6 #include "bsp_int.h"
7 #include "bsp_uart.h"
8 #include "bsp_lcd.h"
9 #include "bsp_rtc.h"
10 #include "bsp_icm20608.h"
11 #include "bsp_spi.h"
12 #include "stdio.h"
13
14/*
15 * @description : 指定的位置顯示整數數據
16 * @param - x : X軸位置
17 * @param - y : Y軸位置
18 * @param – size : 字體大小
19 * @param - num : 要顯示的數據
20 * @return : 無
21 */
22void integer_display(unsignedshort x,unsignedshort y,
unsignedchar size,signedint num)
23{
24char buf[200];
25
26 lcd_fill(x, y, x +50, y + size, tftlcd_dev.backcolor);
27
28 memset(buf,0,sizeof(buf));
29if(num <0)
30 sprintf(buf,"-%d",-num);
31else
32 sprintf(buf,"%d", num);
33 lcd_show_string(x, y,50, size, size, buf);
34}
35
36/*
37 * @description : 指定的位置顯示小數數據,比如5123,顯示為51.23
38 * @param - x : X軸位置
39 * @param - y : Y軸位置
40 * @param – size : 字體大小
41 * @param - num : 要顯示的數據,實際小數擴大100倍,
42 * @return : 無
43 */
44void decimals_display(unsignedshort x,unsignedshort y,
unsignedchar size,signedint num)
45{
46signedint integ;/* 整數部分 */
47signedint fract;/* 小數部分 */
48signedint uncomptemp = num;
49char buf[200];
50
51if(num <0)
52 uncomptemp =-uncomptemp;
53 integ = uncomptemp /100;
54 fract = uncomptemp %100;
55
56 memset(buf,0,sizeof(buf));
57if(num <0)
58 sprintf(buf,"-%d.%d", integ, fract);
59else
60 sprintf(buf,"%d.%d", integ, fract);
61 lcd_fill(x, y, x +60, y + size, tftlcd_dev.backcolor);
62 lcd_show_string(x, y,60, size, size, buf);
63}
64
65/*
66 * @description : 使能I.MX6U的硬件NEON和FPU
67 * @param : 無
68 * @return : 無
69 */
70void imx6ul_hardfpu_enable(void)
71{
72uint32_t cpacr;
73uint32_t fpexc;
74
75/* 使能NEON和FPU */
76 cpacr = __get_CPACR();
77 cpacr =(cpacr &~(CPACR_ASEDIS_Msk | CPACR_D32DIS_Msk))
78|(3UL<< CPACR_cp10_Pos)|(3UL<< CPACR_cp11_Pos);
79 __set_CPACR(cpacr);
80 fpexc = __get_FPEXC();
81 fpexc |=0x40000000UL;
82 __set_FPEXC(fpexc);
83}
84
85/*
86 * @description : main函數
87 * @param : 無
88 * @return : 無
89 */
90int main(void)
91{
92unsignedchar state = OFF;
93
94 imx6ul_hardfpu_enable(); /* 使能I.MX6U的硬件浮點 */
95 int_init(); /* 初始化中斷(一定要最先調用!) */
96 imx6u_clkinit(); /* 初始化系統時鐘 */
97 delay_init(); /* 初始化延時 */
98 clk_enable(); /* 使能所有的時鐘 */
99 led_init(); /* 初始化led */
100 beep_init(); /* 初始化beep */
101 uart_init(); /* 初始化串口,波特率115200 */
102 lcd_init(); /* 初始化LCD */
103
104 tftlcd_dev.forecolor = LCD_RED;
105 lcd_show_string(50,10,400,24,24,
(char*)"IMX6U-ALPHA SPI TEST");
106 lcd_show_string(50,40,200,16,16,(char*)"ICM20608 TEST");
107 lcd_show_string(50,60,200,16,16,(char*)"ATOM@ALIENTEK");
108 lcd_show_string(50,80,200,16,16,(char*)"2019/3/27");
109
110while(icm20608_init()) /* 初始化ICM20608 */
111{
112 lcd_show_string(50,100,200,16,16,
(char*)"ICM20608 Check Failed!");
113 delayms(500);
114 lcd_show_string(50,100,200,16,16,
(char*)"Please Check! ");
115 delayms(500);
116}
117 lcd_show_string(50,100,200,16,16,(char*)"ICM20608 Ready");
118 lcd_show_string(50,130,200,16,16,(char*)"accel x:");
119 lcd_show_string(50,150,200,16,16,(char*)"accel y:");
120 lcd_show_string(50,170,200,16,16,(char*)"accel z:");
121 lcd_show_string(50,190,200,16,16,(char*)"gyro x:");
122 lcd_show_string(50,210,200,16,16,(char*)"gyro y:");
123 lcd_show_string(50,230,200,16,16,(char*)"gyro z:");
124 lcd_show_string(50,250,200,16,16,(char*)"temp :");
125 lcd_show_string(50+181,130,200,16,16,(char*)"g");
126 lcd_show_string(50+181,150,200,16,16,(char*)"g");
127 lcd_show_string(50+181,170,200,16,16,(char*)"g");
128 lcd_show_string(50+181,190,200,16,16,(char*)"o/s");
129 lcd_show_string(50+181,210,200,16,16,(char*)"o/s");
130 lcd_show_string(50+181,230,200,16,16,(char*)"o/s");
131 lcd_show_string(50+181,250,200,16,16,(char*)"C");
132
133 tftlcd_dev.forecolor = LCD_BLUE;
134
135while(1)
136{
137 icm20608_getdata();/* 獲取數據值 */
138/* 在LCD上顯示原始值 */
139 integer_display(50+70,130,16, icm20608_dev.accel_x_adc);
140 integer_display(50+70,150,16, icm20608_dev.accel_y_adc);
141 integer_display(50+70,170,16, icm20608_dev.accel_z_adc);
142 integer_display(50+70,190,16, icm20608_dev.gyro_x_adc);
143 integer_display(50+70,210,16, icm20608_dev.gyro_y_adc);
144 integer_display(50+70,230,16, icm20608_dev.gyro_z_adc);
145 integer_display(50+70,250,16, icm20608_dev.temp_adc);
146
147/* 在LCD上顯示計算得到的原始值 */
148 decimals_display(50+70+50,130,16,
icm20608_dev.accel_x_act);
149 decimals_display(50+70+50,150,16,
icm20608_dev.accel_y_act);
150 decimals_display(50+70+50,170,16,
icm20608_dev.accel_z_act);
151 decimals_display(50+70+50,190,16,
icm20608_dev.gyro_x_act);
152 decimals_display(50+70+50,210,16,
icm20608_dev.gyro_y_act);
153 decimals_display(50+70+50,230,16,
icm20608_dev.gyro_z_act);
154 decimals_display(50+70+50,250,16,
icm20608_dev.temp_act);
155 delayms(120);
156 state =!state;
157 led_switch(LED0,state);
158}
159return0;
160}
文件main.c一開始有兩個函數integer_display和decimals_display,這兩個函數用于在LCD上顯示獲取到的ICM20608數據值,函數integer_display用于顯示原始數據值,也就是整數值。函數decimals_display用于顯示實際值,實際值擴大了100倍,此函數會提取出實際值的整數部分和小數部分并顯示在LCD上。另一個重要的函數是imx6ul_hardfpu_enable,這個函數用于開啟I.MX6U的NEON和硬件FPU(浮點運算單元),因為本章使用到了浮點運算,而I.MX6U的Cortex-A7是支持NEON和FPU(VFPV4_D32)的,但是在使用I.MX6U的硬件FPU之前是先要開啟的。
第110行調用了函數icm20608_init來初始化ICM20608,如果初始化失敗的話就會在LCD上閃爍提示語句。最后在main函數的while循環中不斷的調用函數icm20608_getdata獲取ICM20608的傳感器數據,并且顯示在LCD上。實驗程序編寫就到這里結束了,接下來就是編譯、下載和驗證了。
27.4編譯下載驗證
27.4.1 編寫Makefile和鏈接腳本
修改Makefile中的TARGET為icm20608,然后在在INCDIRS和SRCDIRS中加入“bsp/spi”和“bsp/icm20608”,修改后的Makefile如下:
示例代碼27.4.1.1 Makefile文件代碼
1 CROSS_COMPILE ?= arm-linux-gnueabihf-
2 TARGET ?= icm20608
3
4/* 省略掉其它代碼...... */
5
6 INCDIRS := imx6ul
7 stdio/include
8 bsp/clk
9 bsp/led
10 bsp/delay
11 bsp/beep
12 bsp/gpio
13 bsp/key
14 bsp/exit
15 bsp/int
16 bsp/epittimer
17 bsp/keyfilter
18 bsp/uart
19 bsp/lcd
20 bsp/rtc
21 bsp/i2c
22 bsp/ap3216c
23 bsp/spi
24 bsp/icm20608
25
26 SRCDIRS := project
27 stdio/lib
28 bsp/clk
29 bsp/led
30 bsp/delay
31 bsp/beep
32 bsp/gpio
33 bsp/key
34 bsp/exit
35 bsp/int
36 bsp/epittimer
37 bsp/keyfilter
38 bsp/uart
39 bsp/lcd
40 bsp/rtc
41 bsp/i2c
42 bsp/ap3216c
43 bsp/spi
44 bsp/icm20608
45
46/* 省略掉其它代碼...... */
47
48$(COBJS): obj/%.o : %.c
49 $(CC) -Wall -march=armv7-a -mfpu=neon-vfpv4 -mfloat-abi=hard -Wa,
-mimplicit-it=thumb -nostdlib -fno-builtin
-c -O2 $(INCLUDE) -o $@ $<
50
51 clean:
52 rm -rf $(TARGET).elf $(TARGET).dis $(TARGET).bin $(COBJS)$(SOBJS)
第2行修改變量TARGET為“icm20608”,也就是目標名稱為“ap3216c”。
第23和24行在變量INCDIRS中添加SPI和ICM20608的驅動頭文件(.h)路徑。
第43和44行在變量SRCDIRS中添加SPI和ICM20608驅動文件(.c)路徑。
第49行加入了“-march=armv7-a -mfpu=neon-vfpv4 -mfloat-abi=hard”指令,這些指令用于指定編譯浮點運算的時候使用硬件FPU。因為本章使用到了浮點運算,而I.MX6U是支持硬件FPU的,雖然我們在main函數中已經打開了NEON和FPU,但是在編譯相應C文件的時候也要指定使用硬件FPU來編譯浮點運算。
鏈接腳本保持不變。
27.4.2編譯下載
使用Make命令編譯代碼,編譯成功以后使用軟件imxdownload將編譯完成的icm20608.bin文件下載到SD卡中,命令如下:
chmod 777 imxdownload //給予imxdownload可執行權限,一次即可
./imxdownload icm20608.bin /dev/sdd //燒寫到SD卡中
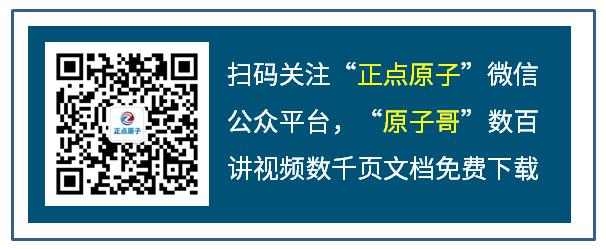
燒寫成功以后將SD卡插到開發板的SD卡槽中,然后復位開發板。如果ICM20608工作正常的話就會在LCD上顯示獲取到的傳感器數據,如圖27.4.2.1所示:
圖27.4.2.1LCD界面
在圖27.4.2.1中可以看到加速度計Z軸在靜止狀態下是0.98g,這不正是重力加速度。溫度傳感器測量到的溫度是31.39°C,這個是芯片內部的溫度,并不是室溫!芯片內部溫度一般要比室溫高。如果動一下開發板的話加速度計和陀螺儀的數據就會變化。

![[JSOI2018]潛入行動](http://pic.xiahunao.cn/[JSOI2018]潛入行動)





)
函數(1))




函數的應用)





