文章目錄
前言
7.1.1 設置Home位置
7.1.2 視頻:制作并保存多路點任務
7.1.3 視頻:加載已保存的多航點任務
7.1.4 使用說明
7.1.5 提示
7.1.6 自動網格
7.1.7 任務指令
7.1.8 任務結束
7.1.9 任務重置
7.1.10 MIS_OPTIONS
7.1.11 任務再出發
7.1.12 任務大小
7.1.13 如何預取已存儲的任務地圖
7.1.14 偶爾你會看到一些非常大的數字
前言
本頁介紹所有類型飛行器的通用航點設置。
7.1.1 設置Home位置
對于 Copter、Plane 和 Rover,Home 點被設置為飛行器解鎖的位置。這意味著如果你執行 RTL,它將返回解鎖時的位置,因此請在你希望它返回的位置解鎖車輛,或使用集結點設置其他返回點。
7.1.2 視頻:制作并保存多路點任務
7.1.3 視頻:加載已保存的多航點任務
7.1.4 使用說明
在下面的截圖中,旋翼機任務開始時會自動起飛到 20m 的高度;然后飛往 WP2,途中會上升到 100m 的高度,然后等待 10s;接著飛行器會飛往 WP3(途中會下降到 50m 的高度),然后返回發射位置。到達發射位置后,飛行器將著陸。飛行任務假定發射位置設置在 Home 原點。

你可以輸入航點和其他命令(更多信息請參閱下面的任務命令(Mission commands)部分)。在每一行的下拉菜單中,選擇你想要的命令。列標題將發生變化,顯示該命令需要哪些數據。點擊地圖即可輸入緯度和經度。高度是相對于你的發射高度/Home 原點位置而言的,例如,如果你設置為 100m,它就會在你上方 100m 處飛行。
Default Alt?是輸入新航點時的默認高度。有關高度定義,請參閱 ArduPilot 中的"理解高度"(Understanding Altitude in ArduPilot)。
驗證高度是指 Mission Planner 將使用谷歌地球的地形數據來調整每個航點的理想高度,以反映下方地面的高度。因此,如果你的航點位于山丘上,如果選擇了該選項,Mission Planner 將按照山丘的高度增加你的 ALT 設置。這是確保不會撞山的好方法!
完成任務后,選擇"寫入",任務就會發送到 APM 并保存在 EEPROM 中。你可以通過選擇"讀取"來確認是否如你所愿。
你可以通過選擇"保存WP文件"將多個任務文件保存到本地硬盤,或通過右鍵菜單中的 "加載WP文件"讀取文件:

7.1.5 提示
預取:你可以緩存地圖數據,這樣就不需要在野外訪問互聯網了。單擊"預獲取"按鈕,按住 Alt 鍵畫出一個方框,下載所選地點的圖像。
網格:它允許你繪制一個多邊形(右鍵單擊),并在所選區域內自動創建航點。請注意,它不會進行"孤島檢測",也就是說,如果你有一個大的多邊形,里面還有一個小的多邊形,那么小的多邊形不會被排除在大的多邊形之外(更多信息請參閱?this)。此外,如果多邊形部分向后翻了一倍(如字母 U),中間的空地也將作為飛越的一部分。
將 Home 位置設置為當前位置非常簡單,只需點擊輸入 Home 位置上方的"Home位置",它就會將 Home 位置設置為當前坐標。
右鍵單擊一端并選擇"測量距離",即可測量航點之間的距離。然后右鍵單擊另一端,再次選擇"測量距離"。這時會打開一個對話框,顯示兩點之間的距離。
7.1.6 自動網格
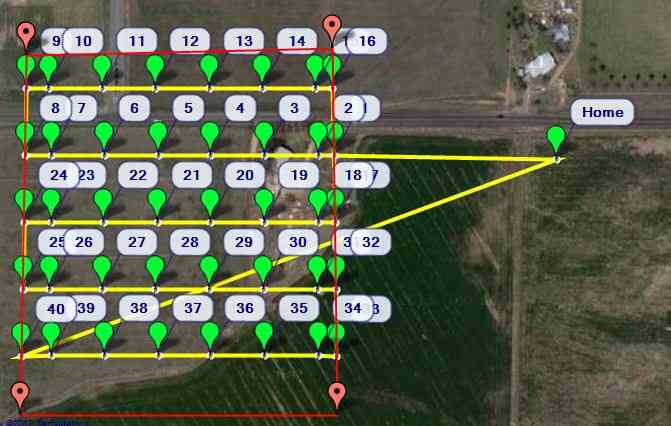
你還可以讓 Mission Planner 為你創建一個任務,這對于測繪任務等功能非常有用,因為在這些任務中,飛機只需以"割草機"的模式在某一區域上空來回飛行以收集照片。
為此,請在右鍵菜單中選擇多邊形,然后在要繪制的區域周圍畫一個方框。然后選擇自動 WP、網格。按照對話框流程選擇高度和間距。然后,Mission Planner 將生成類似下面這樣的任務:
7.1.7 任務指令
Mission Planner 會提供適合當前飛行器類型的命令過濾列表,并為需要用戶提供值的參數添加列標題。這些參數包括前往航點和在附近停泊的導航命令、執行特定操作(例如拍照)的 DO 命令,以及可控制 DO 命令運行時間的條件命令。
?
示例:LOITER_TURNS命令,帶標題,指示轉彎的圈數,方向和位置
所有 ArduPilot 平臺支持的全套任務命令均列于 MAVLink 任務命令信息 (MAV_CMD) (MAVLink Mission Command Messages (MAV_CMD)) 中。其中包括每條命令的全名(在協議定義中定義)、支持哪些參數的信息以及相應的 Mission Planner 列標題。
!Note
Mission Planner 使用的是命令全名的縮略版。例如,MAV_CMD_NAV_WAYPOINT、MAV_CMD_CONDITION_DISTANCE、MAV_CMD_DO_SET_SERVO 等命令在 MP 中分別列為 WAYPOINT、CONDITION_DISTANCE 和 DO_SET_SERVO。
7.1.8 任務結束
任務列表完成后,Copter 將無限期地在最后一個航點懸停,直到模式改變或加鎖(如著陸時),Rover 將保持,但 Plane 將 RTL,除非最后一個任務項目是無限懸停或轉彎,或者著陸。
7.1.9 任務重置
在旋翼機和無人車上,每次加鎖時,任務都會重置到任務列表的起始位置。在固定翼上,除了在"自動"模式下不會在加鎖時重置,并且會將"任務指針"停留在要執行的最后一個任務項目上之外,其他情況都是類似重置。對于所有飛行器,任何著陸任務項目在完成著陸后都不會進入下一個任務項目。可以設置?MIS_OPTIONS?參數第 2 位,以便在著陸后繼續執行任務。
可以設置?RCx_OPTION?開關功能("24"),以便隨時將任務項目指針重置到任務列表的起始位置。
此外,還可以使用?MIS_RESTART?參數將任務設置為在進入自動模式后重置。默認值(0)是在重新進入自動模式時恢復飛行任務。
7.1.10 MIS_OPTIONS
可以設置?MIS_OPTIONS?參數位來修改任務的運行方式:
| ref:MIS_OPTIONS<MIS_OPTIONS> bit | Option |
| 0 | 啟動時清除已加載的任務。必須在每次啟動后加載。 |
| 1 (Plane only) | 使用電池失控保護時的著陸距離計算。請參閱使用 DO_LAND_START(Using DO_LAND_START) |
| 2 | 著陸后繼續。著陸完成后,將任務項目指針前進到下一個任務項目。如果沒有項目,則 RTL。 |
7.1.11 任務再出發
當模式更改中斷時,返回任務序列的行為將在"任務恢復時的倒帶"(Mission Rewind on Resume)一節中描述。
7.1.12 任務大小
自動駕駛儀可存儲的任務項目數量限制為大約 650 個航點。如果你需要更長的飛行任務,可以設置?BRD_SD_MISSION?參數,在 SD 卡上創建一個文件來存儲更多的飛行任務。該文件最大可設置為 64 (kB),這將允許在一個任務中總共存儲超過 4,000 個航點。
 重放)









)








