? ? 筆者最近搗鼓Simulink,發現MATLAB的仿真模塊真的十分強大,以前只是在命令窗口敲點代碼,直到不小心敲入simulink,就一發不可收拾。話說simulink的模塊化建模確實方便,只要拖拽框框然后雙擊設置屬性就可以慢慢堆建自己的模型,這一點我很中意(*^__^*) 。
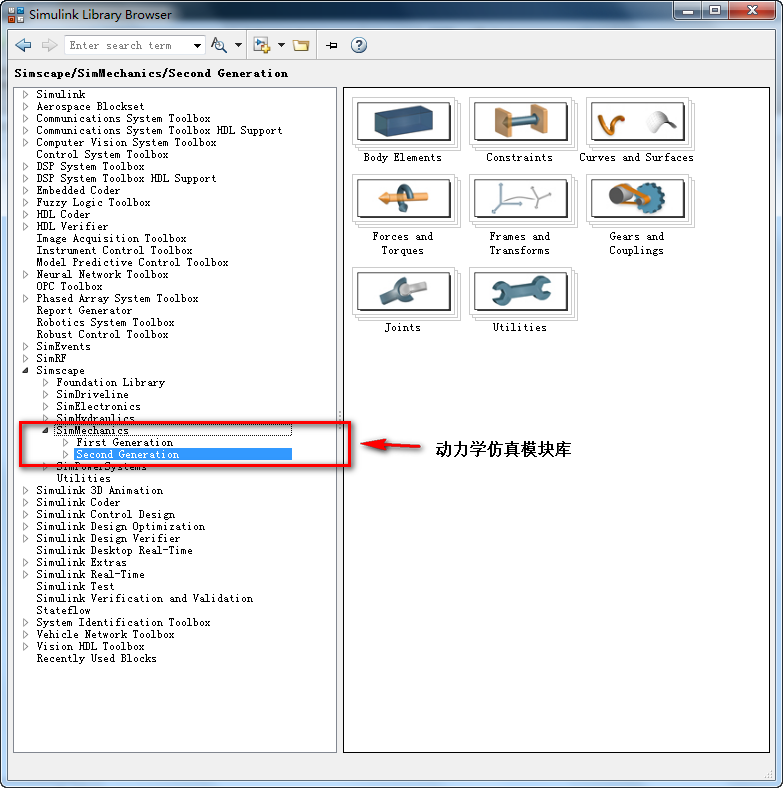
? ? 最近在學習一些控制理論,發現倒立擺是個不錯的學習平臺,開始學習肯定需要機構上面的運動學及動力學建模,一直習慣Adams進行運動仿真,但Adams安裝比較繁瑣。。。便想利用MATLAB代替仿真,順便學習了解下傳說的simulink,直接搜查閱資料。發現Simscape里面的simmechanics就是運動仿真模塊。于是趕緊打開俺的MATLAB2015b,敲入simulink再用力敲打回車,就出現如下窗口。。。
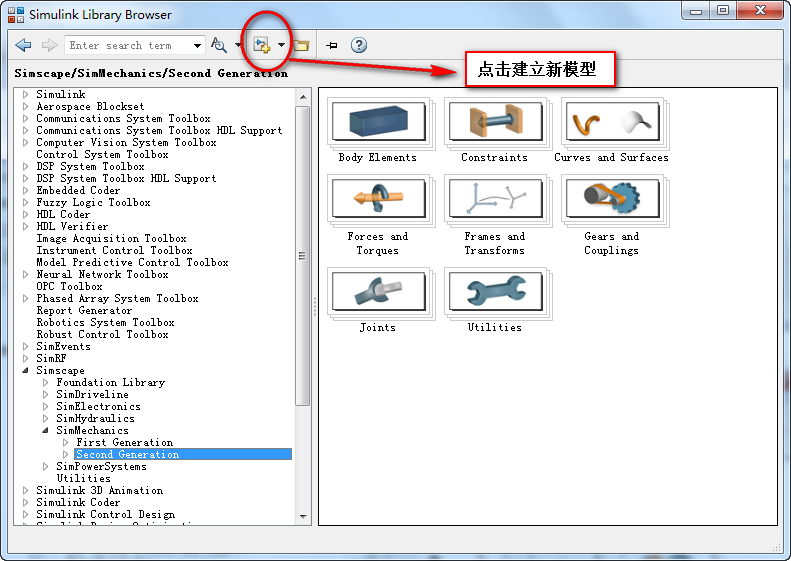
一.新建一個模型New Model
?
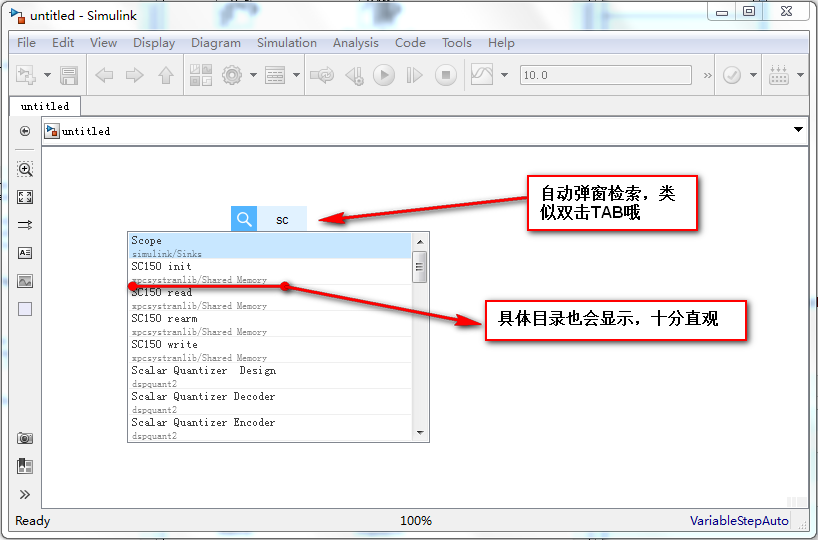
? ? 新建模型將出現空白界面,所有建模要用的block都必須拖到該界面進行設置和連接,因為模塊庫里Block特別的多,一個一個找真的特別麻煩,強烈建議記下常用block的名字,比如示波器scope,時鐘clock,階躍信號step等等等等,今后可以直接在模型空白處敲入字符,自動檢索,真的是方便感人,如圖。
二.SimMechanics/First Generation模型
? ? 需要注意的是,SimMechanics庫分為First Generation和Second Generation,即第一代和第二代。
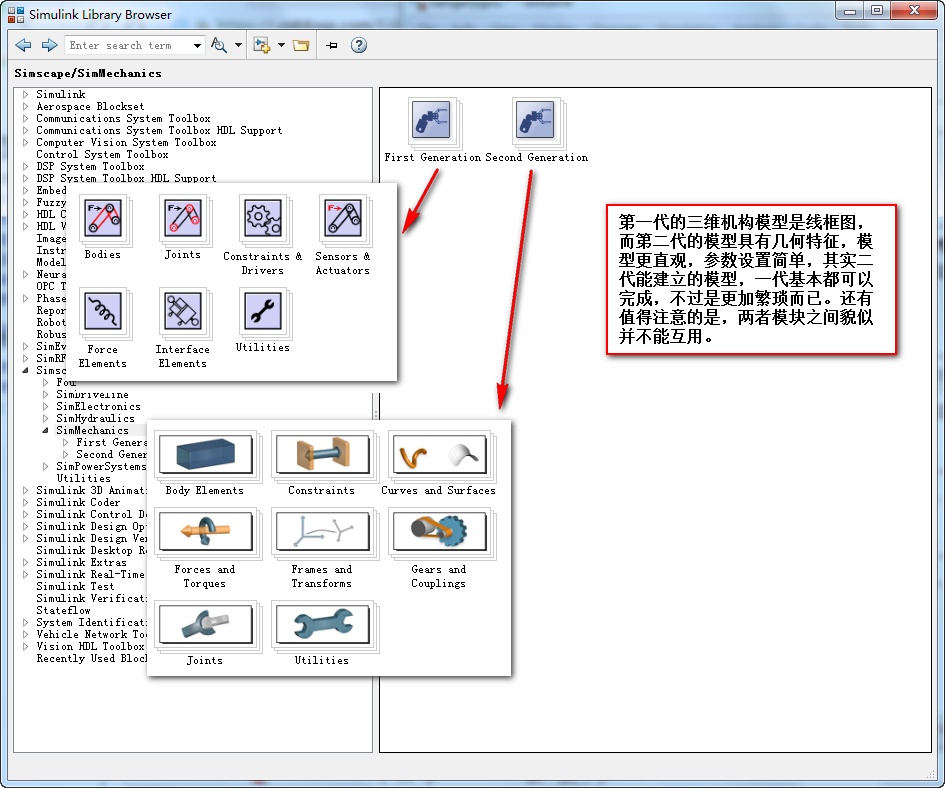
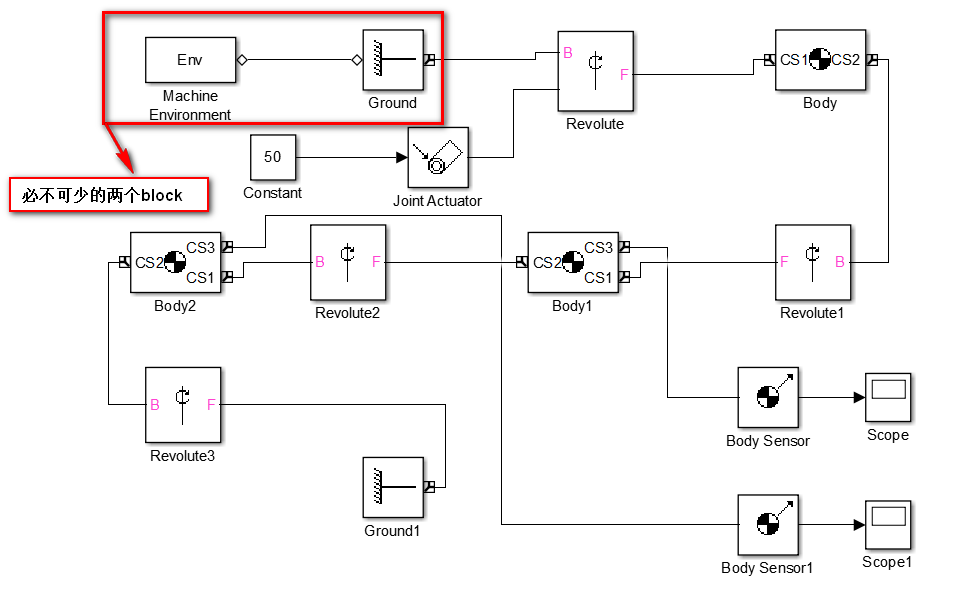
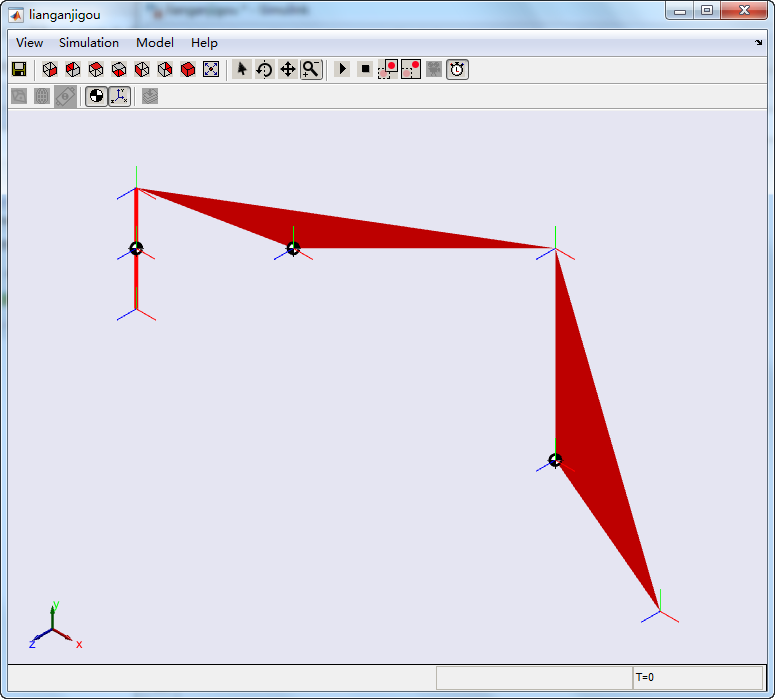
其實MATLAB幫助文檔里面很多demo值得學習理解,我簡單了解了第一代模塊,跟著說明建立了一個平面四連桿機構模型,模塊框圖和仿真界面如下:
?
?
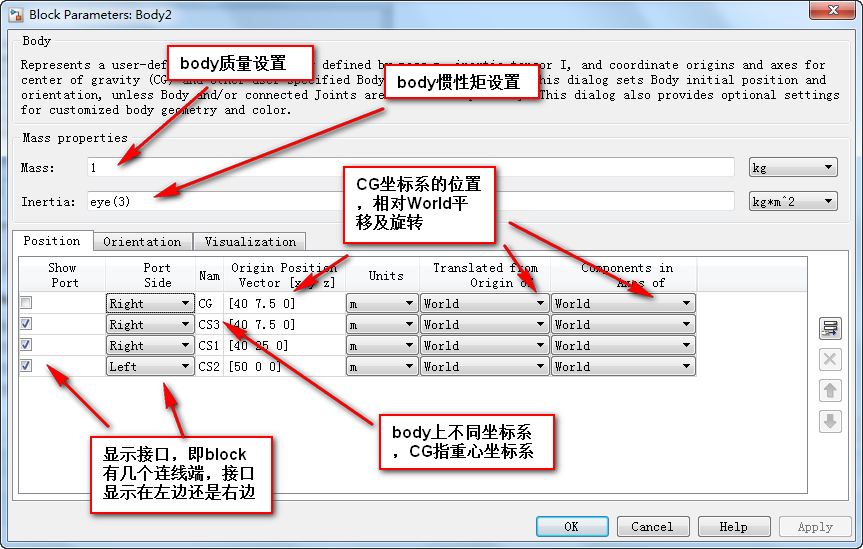
?難點就是body block的屬性設置,必須清楚了解坐標系的建立,新建的CS(coordinate system)相對哪個坐標平移,又相對哪個坐標旋轉。其中World坐標系是世界坐標系,也就是絕對坐標系,所有的坐標系都是相對它而言的,所以說這個模塊必不可少。
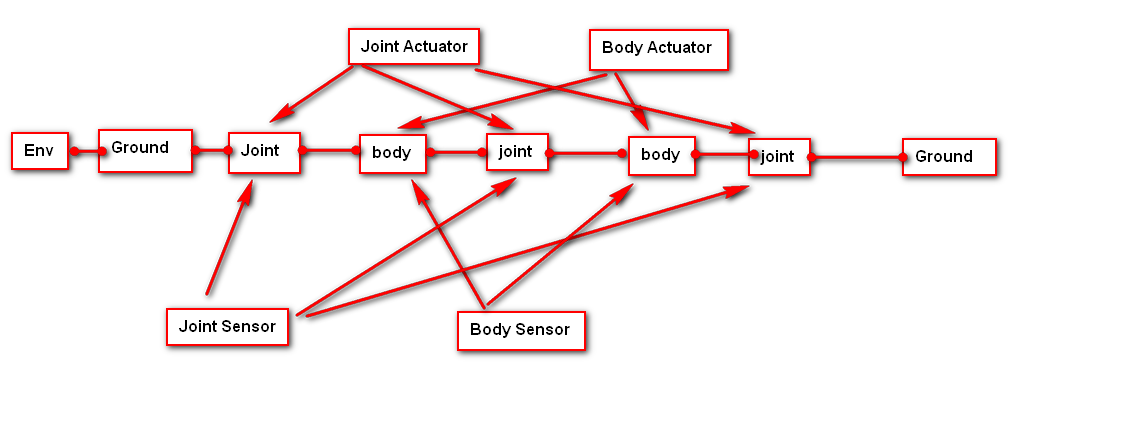
? ? 總之,模型的建立順序一般如圖,除了機械環境Env,其它的block連接都是坐標系與坐標系之間的連接,但body與body之間不能直接連接,必須通過joints確定兩者之間的連接副。最后的body與地面連接就形成閉環機構,也可以只出現一個Ground,即懸空機構,像單擺運動,機械臂等只有基座與地面連接。當然也可以body與body之間形成閉環。Joint/Body Actuator 是連接副和機構驅動器,發送信號可以向Joint或者body添加動力或運動;同理有Joint和Body的Sensor,即傳感器,可以利用scope示波器觀察Joint和body的受力情況和運動規律。
三.SimMechanics/Second Generation模型
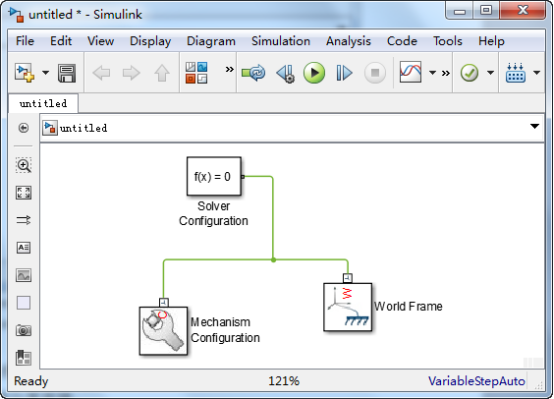
?第二代模型比較直觀,可以直接建立幾何特征,solid代替了一代的body,可以直接從中設置很多屬性。參考MATLAB的demo模型,在使用 second generation建立機構模型時,必須添加的模塊有
1) ?solver configuration求解器配置塊,是進行求解的必須模塊,雙擊可以配置具體求解方式。
2) ?world frame 世界坐標系,其它一切坐標系都要直接或間接與其連接。
3)mechanism configuration 機構配置塊,雙擊打開可以修改重力的大小和方向等。
?
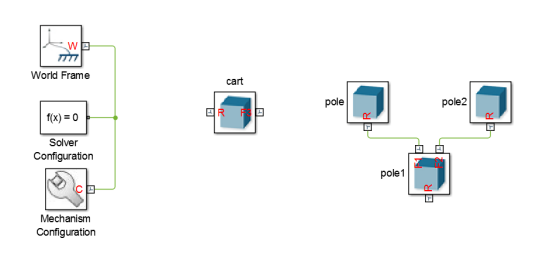
? 為了建立倒立擺,我打算添加兩個構件,一個是小車構件,記為cart,質量設置在重心處,與地面(世界坐標系)為滑塊連接(移動副),幾何外形簡化為為長方體;另一個是倒立桿構件,記為pole,質量在最高處,與小車進行旋轉副連接,外形簡化為圓柱體。
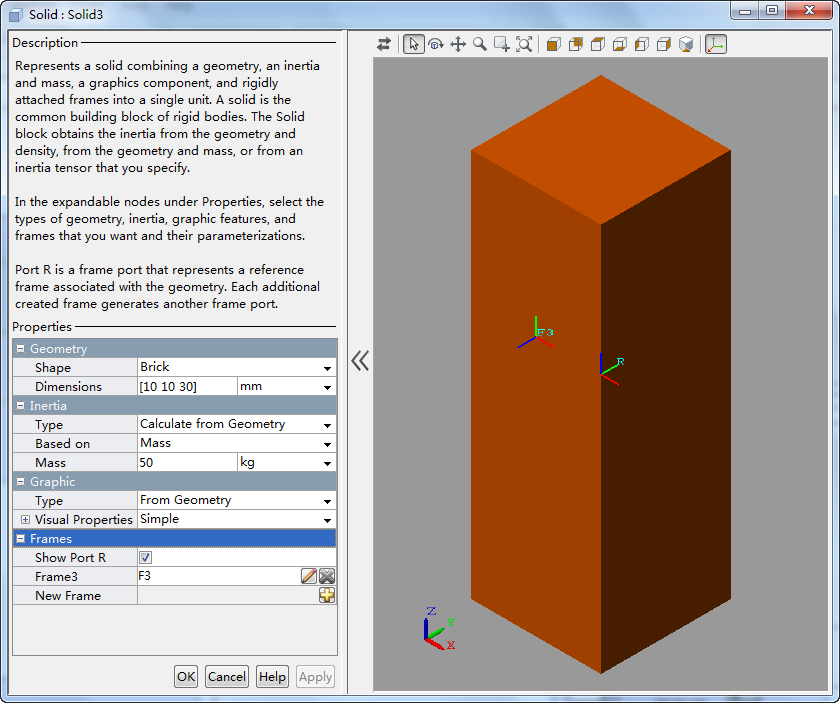
幾何體的建立模塊為solid,如下圖,參數編輯窗口分為Description和Properties兩欄,描述的內容十分有閱讀價值,了解其屬性才能設置好具體參數,以下是小車機構的屬性設置:
?
? ? 小車構件新建了一個Frames,在第二代SIMmechanics里面坐標系用Frames表示,一個零件可以添加多個Frame,并且兩個Frame之間可以直接連線進行剛性連接,中間可以不用joint進行連接,如下圖,我把倒立桿的外形潤色了一下:
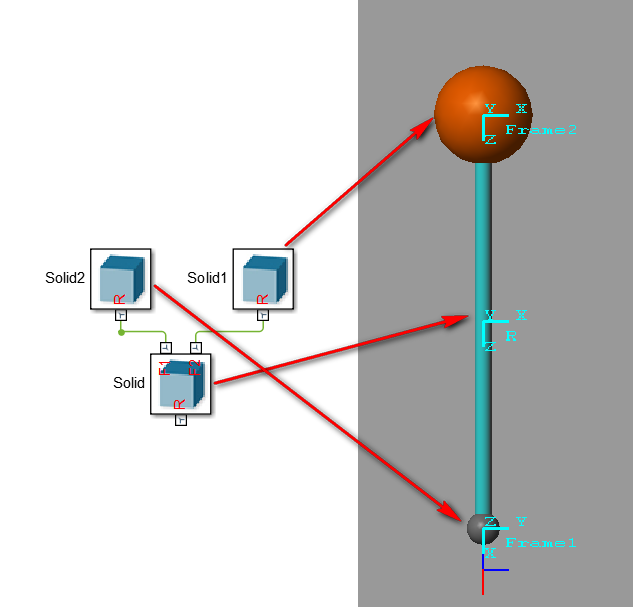
現在的模塊窗口有以下Block,直接連接的話就是和World Frame作剛性連接,那么整個機構將是靜止不動的,所以接下來是Joint block的添加。
接下來是比較重要的連接模塊,即連接副的選擇,如下是庫里面提供的連接副:
?
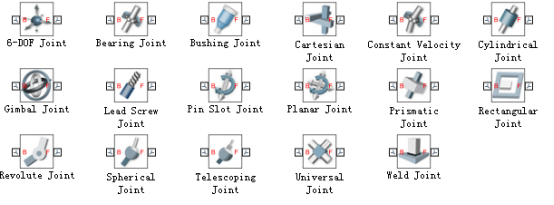
單級直線倒立擺的機構只需兩個連接副,即revolute joint(平面旋轉副)和prismatic joint(柱形滑塊副),將其拖入窗口進行屬性設置和連接。屬性設置窗口如下:
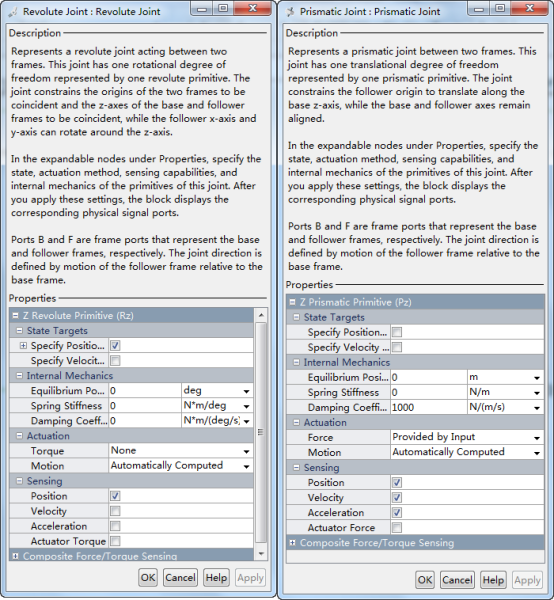
如上圖所示,兩個副的設置窗口比較復雜,必須仔細閱讀Description里面的內容,本模型設計了阻尼系數,并且打開了Sensing接口,這樣可以通過采集兩個副的位置,速度,加速度等運動參數。最后方框圖如下:
連接模塊直接進行仿真的話會彈出如下窗口,重力的默認方向是world frame的-z方向,所以模擬會發生異常,圖示整個機構會自由落體向下。。。。
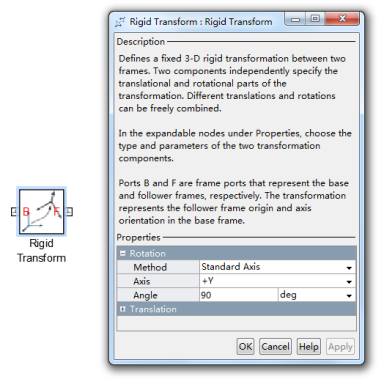
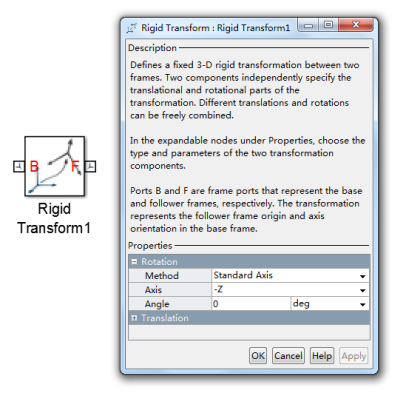
? ? 所以必須引入參考系模塊,如下圖。這個才是設置難點,因為每個坐標系的連接和參考都不同,為了找到合適的方向和位移,必須記牢每個坐標系關于世界坐標系的方位,也可能是英語看的人頭疼,我在這里設置了好久。第一個rigid transform是讓移動副相對world frame的+y方向旋轉90度,第二個rigid transform的引入是可以改變擺桿的初始位置。
?
?
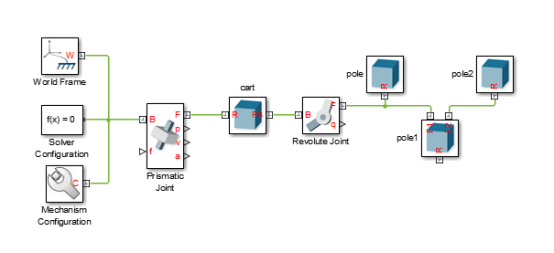
連接后的模型框圖為
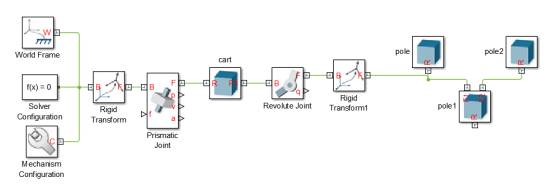
?
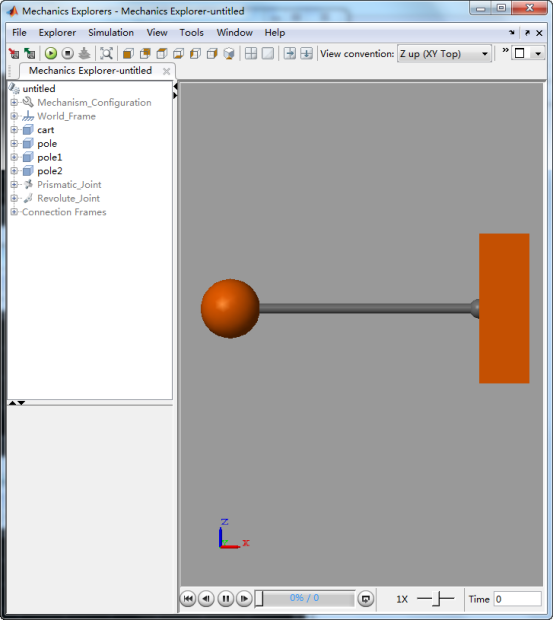
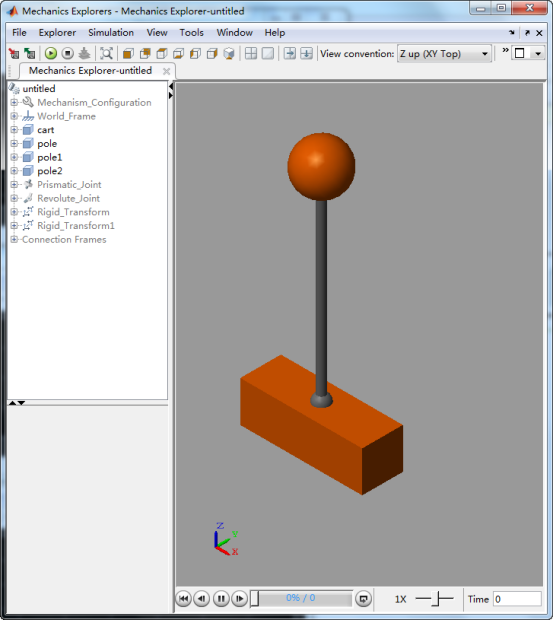
仿真界面如下
為了顯示運動參數,可以添加示波器,不過示波器顯示的是信號量,必須將運動副的sensor接口連接到PS-Simulink Converter轉為信號量,如下圖:
?
?
?
仿真結果為
?
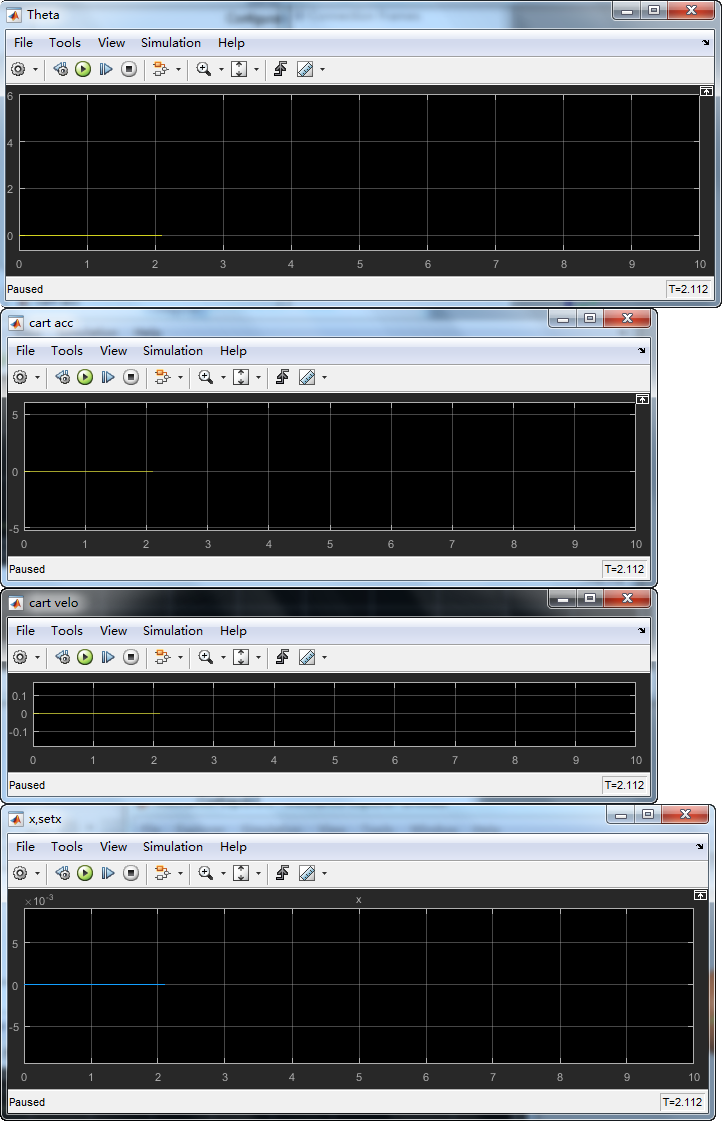
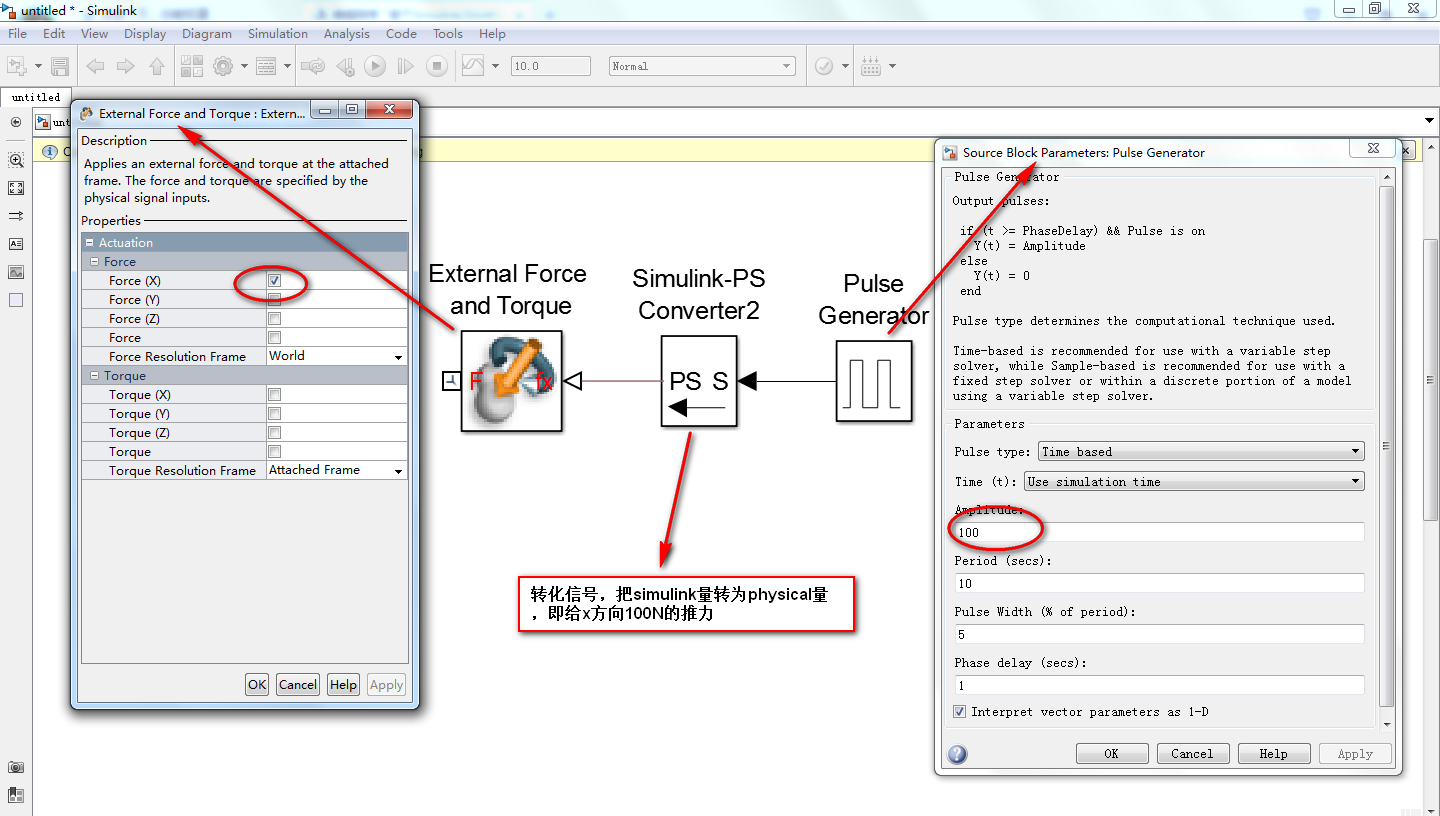
因為設置的初始角度為豎直向上,所以裝置靜止,信號穩定輸出為水平線,所以接下來添加外力模塊如圖,同理需要將方波信號轉為物理信號,模擬在一秒時給擺桿質心一個推力,推力設置為x方向。
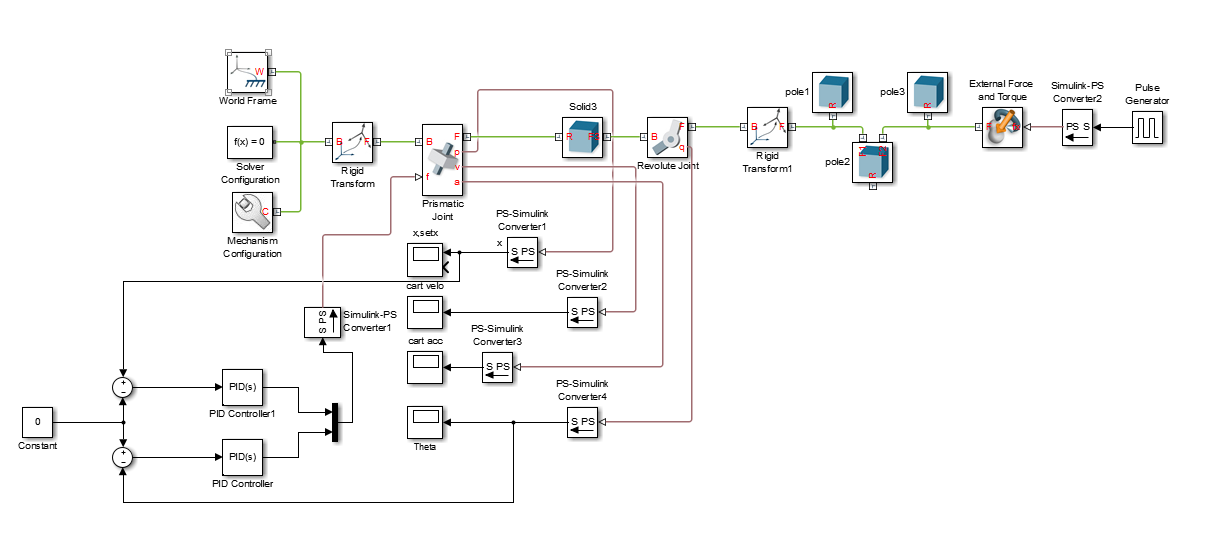
最后模型框圖為:

?
仿真結果如下:
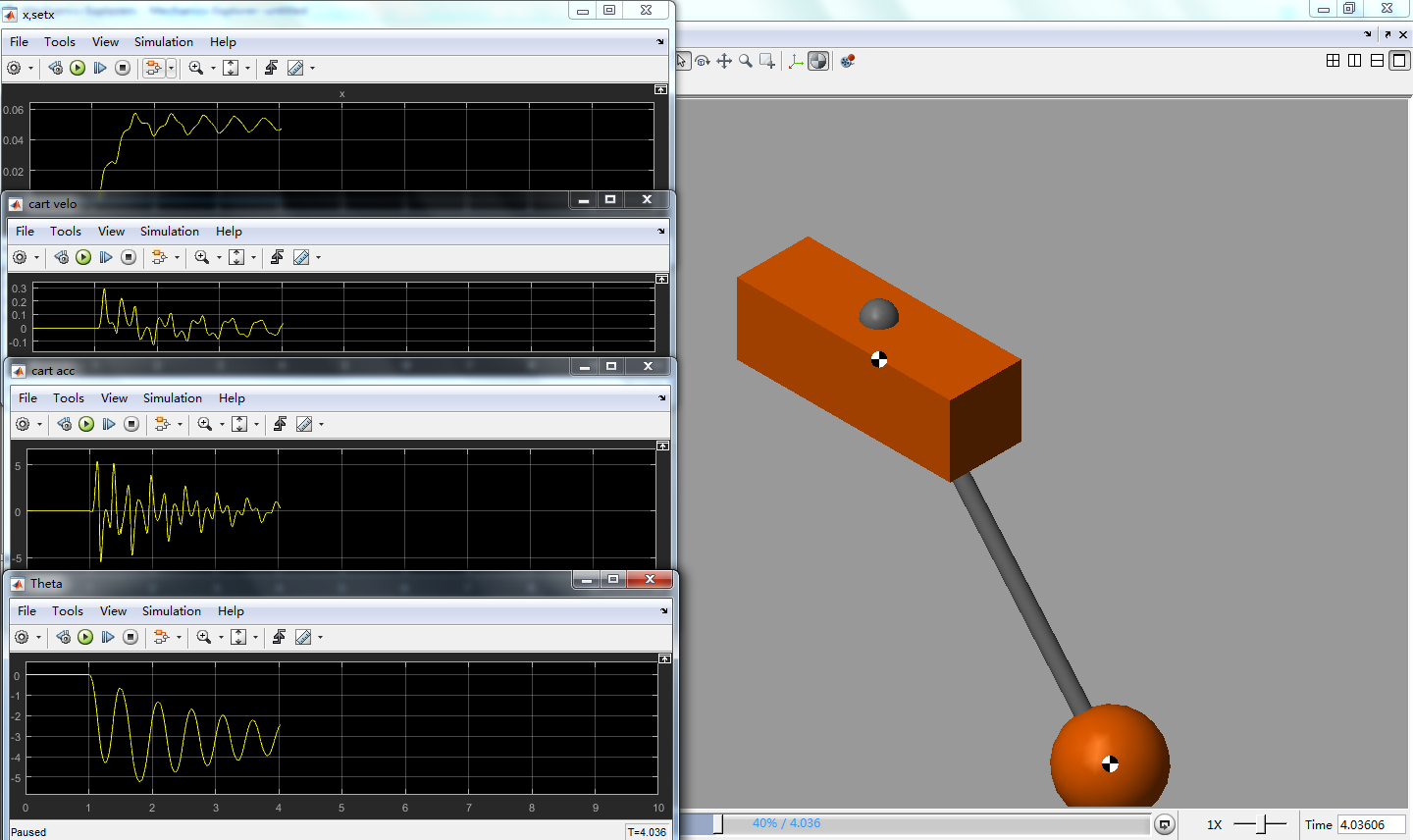
?
?
?? ?由圖中可以得知,在1s時擺桿頂部球心處受到100N沿世界坐標系+x持續0.5S的推力,產生的各種運動參數曲線可以直接在示波器中看到,因為沒有控制力的引入,擺桿會直接倒下。此時為了實現倒立擺的平衡,會在小車x方向添加一個控制力來保持平衡,接下來便是控制器的設計,倒立擺的控制算法有很多,從經典控制理論(傳遞函數),現代控制理論(狀態空間),一直到智能控制理論。每一個理論都可以用來控制倒立擺,可見倒立擺的控制實驗是學習控制理論的最有效平臺。。。
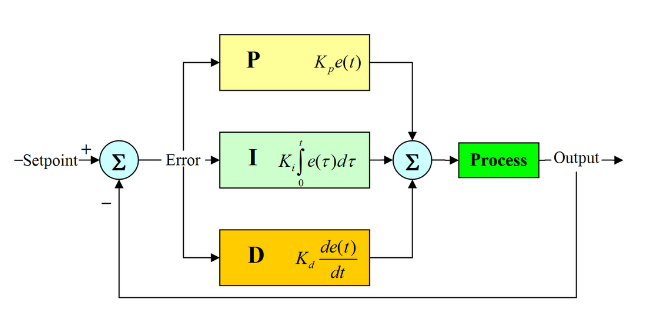
? ? 為了初步設計控制器輸出控制力的信號,我了解了自控理論最經典的PID控制算法,得知其控制理念是直接采集被控變量進行對比然后處理輸出(如下圖),只是參數的整定比較繁瑣,不過卻可以進行初步的實驗仿真,激發自己的學習興趣。PID控制器參考https://www.cnblogs.com/shangdawei/p/4825259.html。文中說的很詳細。里面有程序流程圖教你寫最簡單的控制程序,筆者手頭剛好有12xs128的MCU、普通有刷直流電機和光電編碼器。根據流程,設計了電機的穩定轉速控制器,不過難度依舊是參數的整定。好在MATLAB里關于PID的工具十分強大,里面的可視化工具包pidTuner,命令工具TuningGoal,systune等對于控制器的設計十分有幫助,最近一直在理解這幾個函數指令,自己也從中受益頗深,尤其考驗對自控原理的理解掌握。。。理解后PID算法后,就可以在simulink下開始控制倒立擺的平衡了,由于筆者整定參數還不太利索,經歷多次嘗試后,擺桿還是會倒下。。。。慚愧啊。
以下是運動規律:
?
?
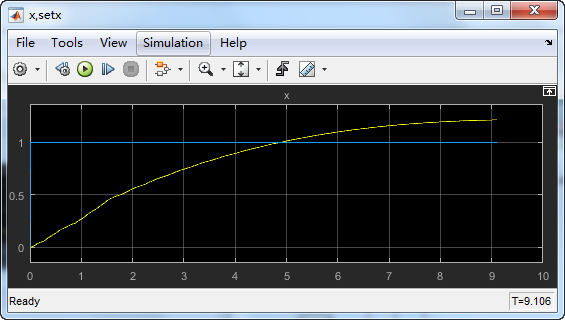
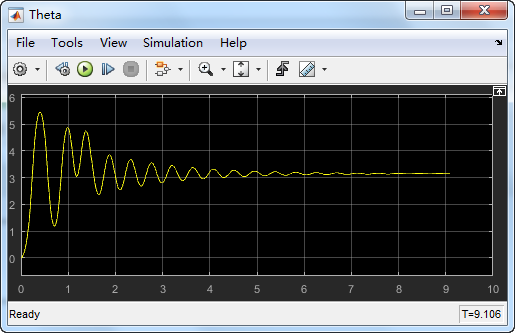
不過之后我發現MATLAB里面自帶了一個demo模型,在MATLAB命令窗口鍵入?InvertedPendulumExample即可打開如下界面。可見,此模型的控制方法是PID Controller和傳遞函數控制器綜合輸出為控制力F(其實角度控制也能用PID調節,只要響應夠快就能實現擺桿的平衡)。不過想要更好的控制倒立擺還是需要動力分析,將傳遞函數寫出,進行根軌跡找出極點,確定好平衡位置。
?? ?
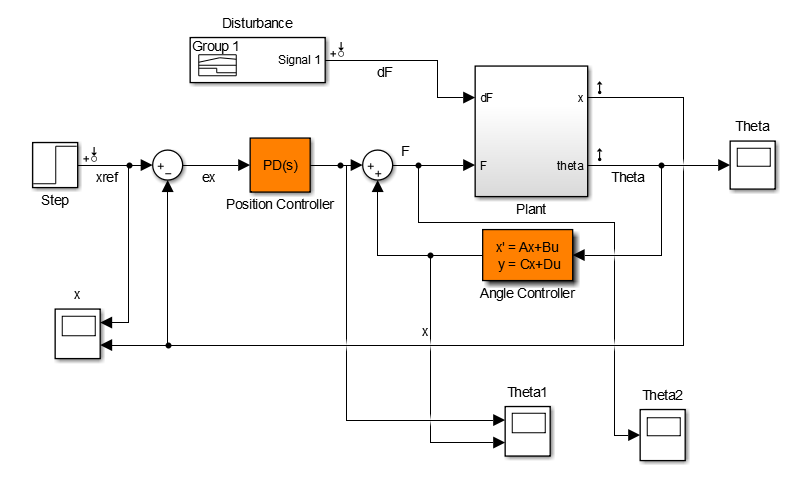
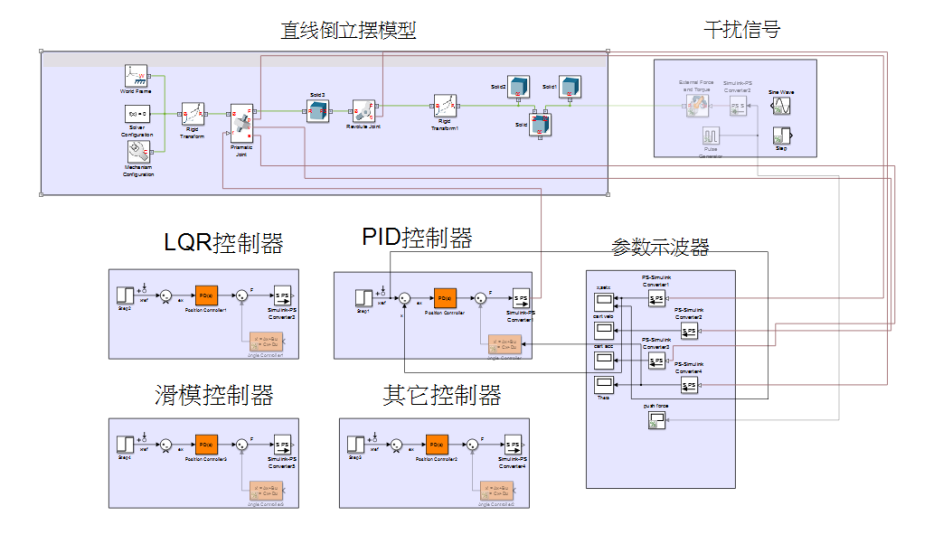
? ? 總之,Simulink對倒立擺的控制學習也提供了可視化的模擬。之后我打算以此模型為基礎,添加不同控制器,學習基本控制理念。今后的大致框圖將擴展成如下幾個區域(當然可以整成一個subsystem):
(1)直線倒立擺模型
(2)干擾信號發生器
(3)參數采集顯示器
(4)不同控制調節器
?




![整理ASP.NET MVC 5各種錯誤請求[401,403,404,500]的攔截及自定義頁面處理實例](http://pic.xiahunao.cn/整理ASP.NET MVC 5各種錯誤請求[401,403,404,500]的攔截及自定義頁面處理實例)














