**攝像機標定:**在計算機視覺研究領域,攝像機標定是一個重要的環節。攝像機標定就是求取攝像機內外參數的過程。
世界坐標系:絕對坐標系,一般的三維場景都由這個坐標系來表示。攝像機可以放置在環境中的任何位置,因此可以用世界坐標系來描述攝像機的位置,并利用它來描述環境中被拍攝物體的位置。
攝像機坐標系:攝像機坐標系是以攝像機為中心的坐標系統,一般采取攝像機的光軸為z軸,以攝像機光心為坐標原點。
像平面坐標系:與攝像機坐標系的x-y平面相平行的平面。像平面的原點定義在攝像機光軸上。光軸與相平面的交點為相平面坐標系原點。有效焦距f為攝像機坐標系原點與相平面坐標系原點的距離。
圖像坐標系:原點定義在圖像矩陣的左上角,單位是像素。與像平面同名坐標系相平行但是單位和坐標原點不同。


1.世界坐標與攝像機坐標之間的變換關系
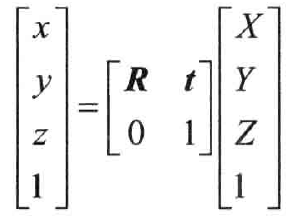
其中R為3*3正交單位矩陣;t為三維平移向量,世界坐標系與攝像機坐標系之間的變換關系稱為剛體變換,只與攝像機的外參數有關,與內參數無關。
2.像平面與攝像機坐標系之間的關系
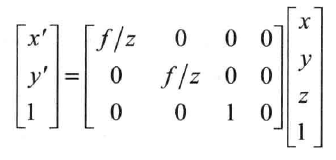
其中(x,y,z)為物點P在攝像機坐標系下的坐標。
3.像平面與圖像坐標之間的關系
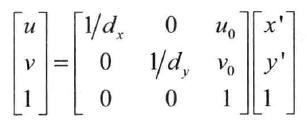
dx,dy表示每一個像素在x’軸與y’軸方向上的物理尺寸為dx,dy(單位是毫米)。

4.圖像坐標與世界坐標之間的變換關系
將以上的矩陣方程聯立起來可得
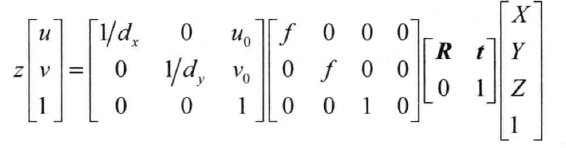
再繼續整理得到:
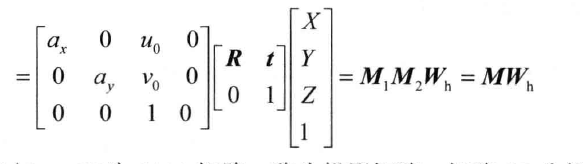
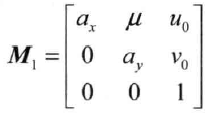
M1為攝像機內參數矩陣。有時也可表示為
M2為攝像機外參數矩陣,包含6個置于攝像機相對世界坐標系的方位有關的外部參數。
以上就是四種坐標系之間的關聯。


)
Apache?Rewrite?詳解)



)

-模糊查找)




)




