我們知道在機器視覺中通常要使用的搭建的視覺測量系統對一個物體的尺寸、形變、以及三維形貌進行測量。一般按照攝像機的個數以及組成部分分為三類測量方法。分別為單目測量、雙目(大于2為多目)測量、以及結構光測量。
單目測量系統
顧名思義單目就指的是僅僅依靠一個攝像機來對物體進行測量,那么這種測量方式在不移動攝像機的情況下是否可以獲得準確像點的三維坐標呢?下面進行詳細的分解。這就要從針孔模型來說起
攝像機坐標系到世界坐標系的轉換
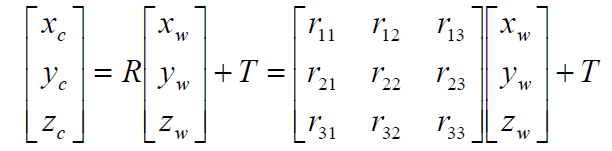
其中 R攝像機外參數中的旋轉矩陣,可表示為下面形式:

圖像坐標系到攝像機坐標系之間的關系

圖像坐標系到世界坐標系之間的轉換關系
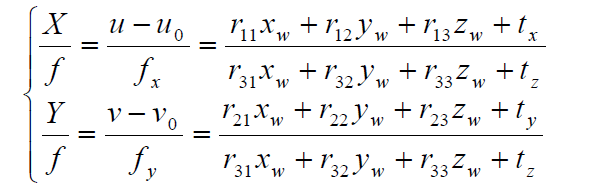
因此可以發現在攝像機內外參數標定好的情況下,如果已知世界坐標系(Xw,Yw,Zw)的情況下可以唯一知道圖像坐標系中的(X,Y)而如果只是知道圖像坐標系中的像點的坐標是無法唯一求解出空間三維坐標。因為這是兩個方程,而未知數是三個,故無法得到唯一的三維坐標。
因此在實際中,都會將單攝像機移動一次,此時攝像機的外參數會發生變化。當攝像機外參數變化時,以上方程組會包含有四個方程,三個未知數,因此可以借助最小二乘法去解這個超定方程。
-模糊查找)




)





)




)


)