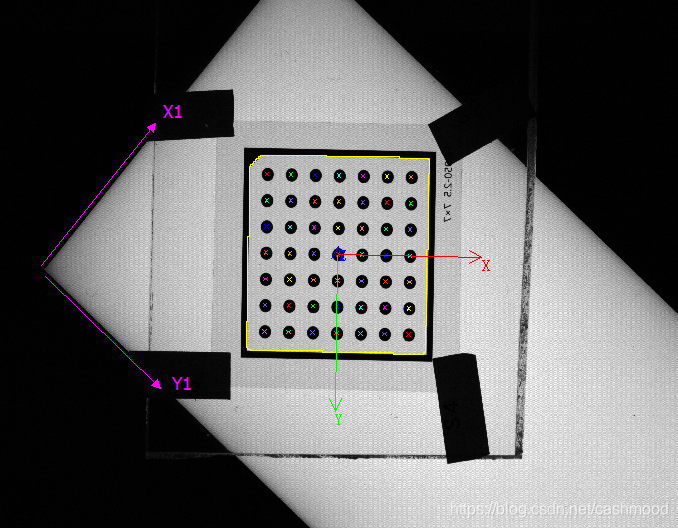
halcon相機標定完成后,世界坐標系原點在標定板的中間,如果要自定義坐標系原點該如何操作
如圖:
方法1
使用仿射變換
*pose_to_hom_mat3d (FinalPose, HomMat3D)
*hom_mat3d_translate_local (HomMat3D, dx, dy, 0, HomMat3DTranslate)
*hom_mat3d_rotate_local (HomMat3DTranslate, rad(da), ‘z’, HomMat3DAdapted)
*hom_mat3d_to_pose (HomMat3DAdapted, PoseAdapted)
方法2
使用設置位置與角度
*tuple_replace (FinalPose, 5, PoseCalib[5]+da, NewPose)
*set_origin_pose (NewPose, dx, dy, 0, PoseAdapted)
PS
我的博客不定時分享日常工作中覺得有價值的內容,包括C#、C++、halcon、運動控制等等內容,喜歡的點贊,關注我。






)

)










