為了檢測viple程序與物理機器人是否能順利連接上
如果能順利連接上,那么,可以通過內建事件從而控制物理機器人的前進、后退、左轉、右轉以及暫停。
如果不能連接上,首先,程序無法控制物理機器人,其次,當viple程序中編寫沿右墻迷宮算法(或者其他算法),由于viple程序和物理機器人不能連接上,無論算法多么高級,都使用不上,當然,也就看不到任何運行效果了。
所以,首先測試viple與物理機器人是否能連接上,這一步驟非常重要。
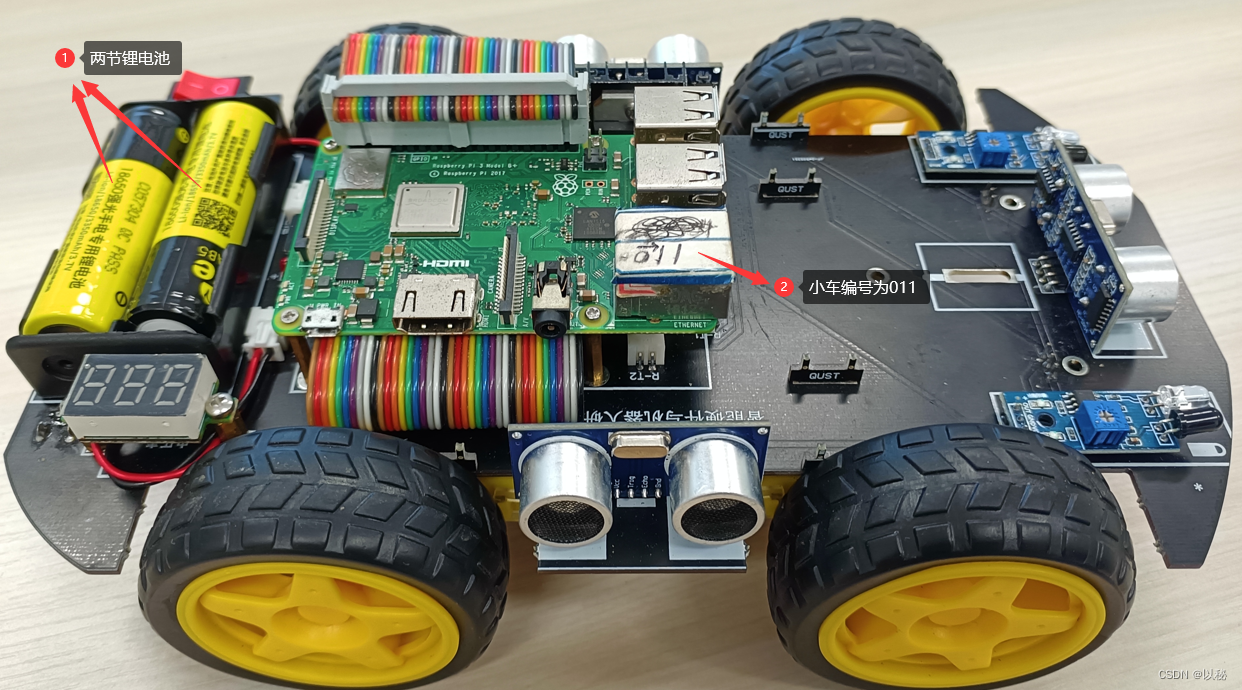
第1步:取出智能小車,為小車裝上電池(或者插上電源)。
找到船型開關

按船型開關,打開系統,此時小車系統運行,發出WiFi信號。


選中小車發出的WiFi信號,輸入密碼:12345678,進行連接。


此時,顯示的是無法連接到這個網絡,那是否連接上了,還需要編寫viple程序來進行測試。
第2步:編寫viple程序,使用↑↓←→方向鍵實現控制小車前進、后退、左轉、右轉的控制。
打開viple軟件(如果此時打不開,可以先斷開小車的wifi,連接到其他的網絡,從而打開viple。因為viple軟件的啟動是需要聯網的,如果不想聯網使用,可以選用4.0.0.1版本)
拖入主機并配置,注意:viple編寫的程序,想要運行在物理機器人上,不再是模擬器,所以,需要按照物理機器人的說明書(常用的配置是:小車的主機IP地址:192.168.10.1、端口號:8124,驅動器左輪和右輪的端口號分別是0和1,前方、右方、左方的超聲波傳感器對應的端口號分別是10,12,11,其他配置需要看說明書)來進行配置,不可隨意更改ip地址和端口號等,由于小車發出了wifi信號,連接類型選用Wi-Fi即可

編寫程序邏輯
首先是前進,機器人驅動器配置了兩個電機,可用于行走,所以當按下↑時,兩個電機的驅動功率值應該分別設置為0.5(只要是0~1之間的數均可,正數表示前進,負數表示后退,左右輪的驅動功率值相等,且都為正數,此時,物理機器人可以向前直行,如果不相等,無法走直線)
根據想法,首先需要拖入一個機器人驅動器,并配置信息(也是需要根據說明書來配置,不可隨意設置)

添加上按鍵事件,將左輪和右輪的驅動功率值設置為0.5,實現前進。

接下來運行程序,檢測小車是否前進。
首先,電腦連接上小車的WiFi信號,再運行viple程序,然后按↑,觀察小車是否前進。


此時,viple程序和物理機器人連接成功,按鍵盤上的方向鍵↑,觀察到小車在直行。
點擊查看運行效果
小車與程序連接成功,于是,按照同樣的思路,將后退、左轉、右轉做完整(如果您想要暫停,還可以添加一個暫停按鍵,實現停止)。

點擊查看運行效果
可能出現的問題(無論哪種情況發生,都要先解決了再做后面的復雜程序):
1、打開船型開關后,在電腦上無法找到小車的wifi信號
解決方案:1)關閉小車電源,重新啟動;2)觀察電壓,若電壓太低,可以充一會電后再打開;3)刷新電腦的WiFi信號,使得電腦能快速搜索到對應的wifi信號;4)關閉電腦的wifi,再重新打開;5)將小車的系統進行重裝(不到萬不得已,不要做這一步,因為您將先研究操作系統是如何安裝的)。
2、連接上wifi后,啟動viple程序失敗

解決方案:
手動設置本機IP地址,將本機IP設置為與機器人IP在同一個網段即可
由于機器人的IP地址是192.168.10.1,所以,本機地址可以設置為192.168.10.小車編號(例如:小車編號為012,那么,本機地址可以設置為192.168.10.12),當然,還需配置子網掩碼和默認網關,然后點擊保存即可。(本處需要有一定的計算機網絡知識)
核心:IP地址、子網掩碼和默認網關,然后點擊“保存”。
?


)

)
作用)











使用 v-if 條件切換后,表格的列的篩選不顯示了)

