內涵
接觸剛性環境任務下的機器人力控(阻抗)性能測試旨在評估機器人在與剛性物體交互時的性能表現。這種測試通過調整機器人的控制參數,如期望剛度和期望阻尼等,并分析記錄的數據,旨在確保機器人能夠在執行任務時保持良好的穩定性和適應性。這種測試不僅評估機器人在接觸剛性物體時的控制精度和適應能力,還驗證機器人在面對不同形狀、尺寸和物理特性物體的魯棒性,以及在突然外部干擾下的穩定性。通過這種測試,可以進一步優化機器人的控制策略和控制參數,從而提高機器人在接觸剛性環境任務下的性能表現,確保機器人能夠在實際應用中應對各種情況并發揮其最大的潛力。
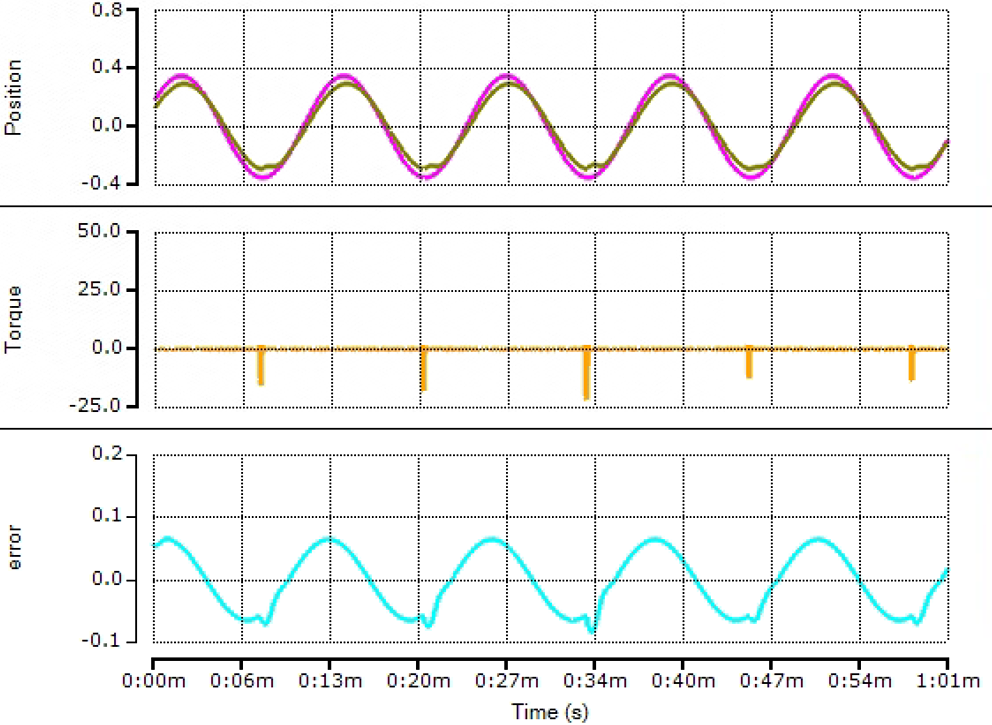
Kd100Bd50
![]()
1e4/(0.1*s^2+1*s+1)
首先測試自由空間中,重力補償后的機器人運動數據變化:

在參考19°范圍內變化。
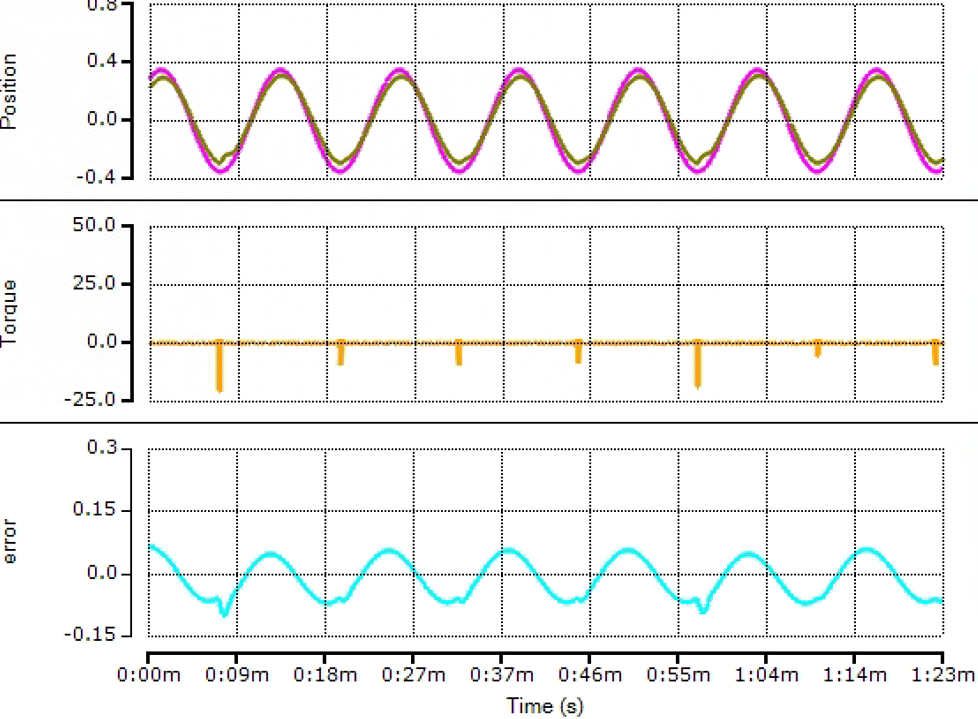
接下來改變范圍,參考20°范圍變化。
Kd10Bd50
1e4/(0.1*s^2+1*s+1)
![]()
目標還是20°

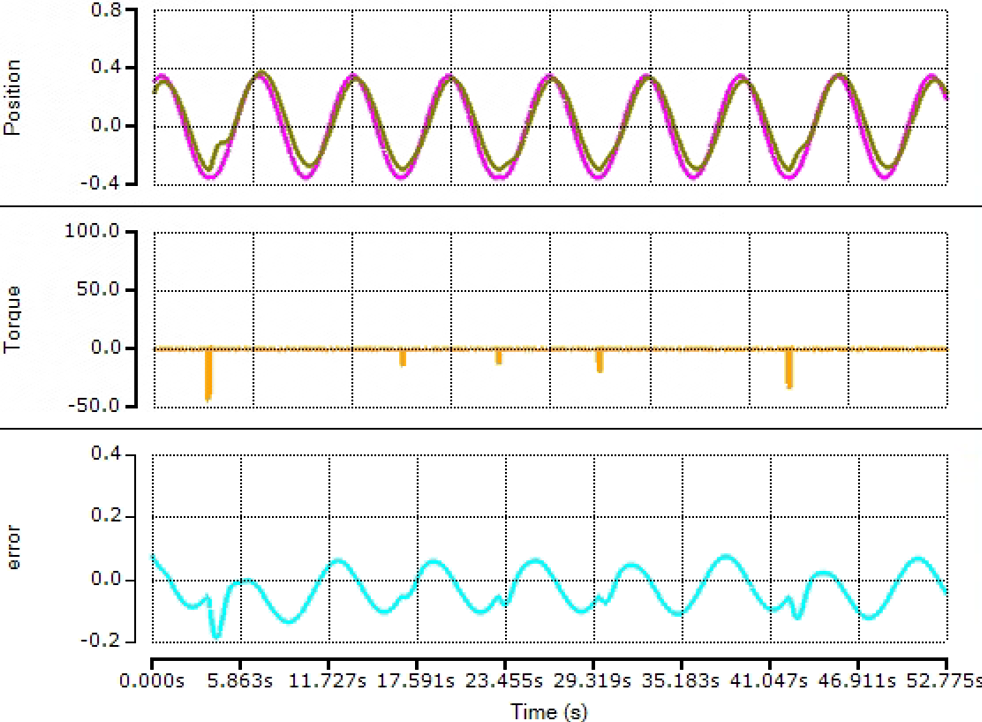
接下來改成20sint,之前是20sin0.5t











隨機森林分類模型)

補充--進程頁表)




