本文僅供學習使用
本文參考:
B站:DR_CAN
Dr. CAN學習筆記-數學基礎Ch0-2 特征值與特征向量
- 1. 定義
- 1.1 線性變換
- 1.2 求解特征值,特征向量
- 1.3 應用:對角化矩陣——解耦Decouple
- 2. Summary
1. 定義
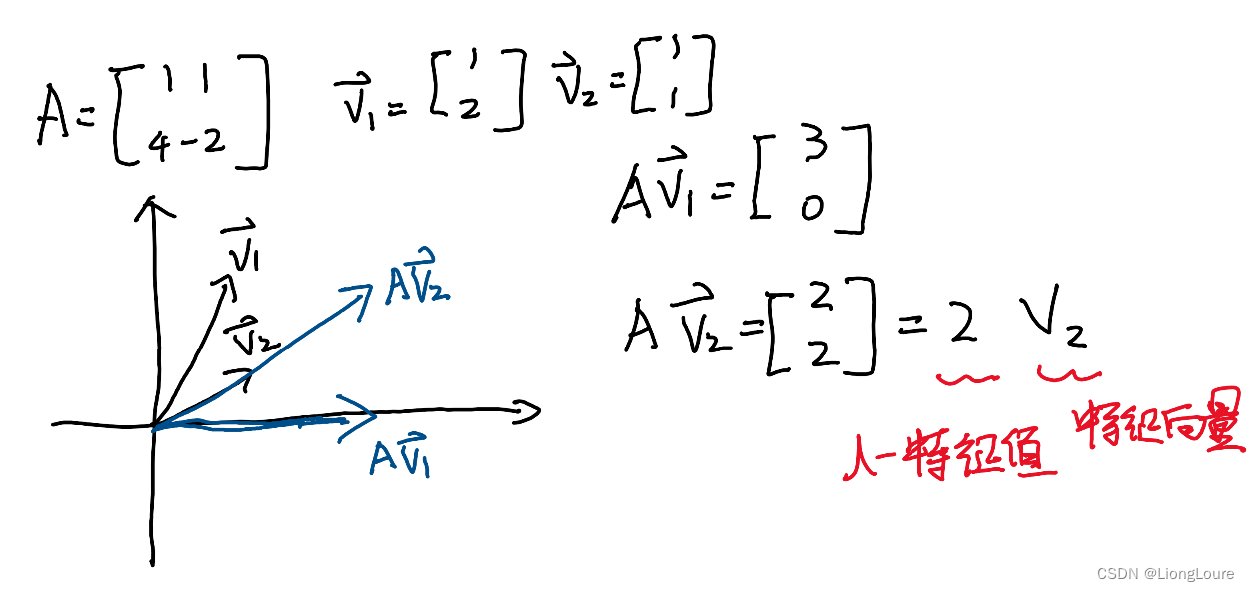
A v ? = λ v ? A\vec{v}=\lambda \vec{v} Av=λv
對于給定線性變換 A A A,特征向量eigenvector v ? \vec{v} v 在此變換后仍與原來的方向共線,但長度可能會發生改變,其中 λ \lambda λ 為標量,即縮放比例,稱其為特征值eigenvalue
1.1 線性變換
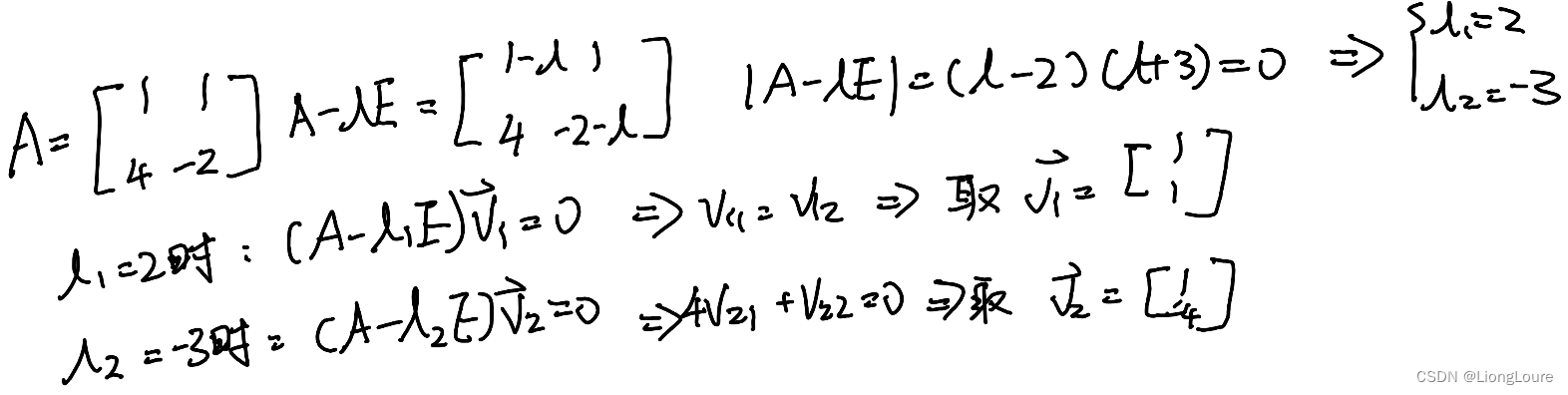
1.2 求解特征值,特征向量
A v ? = λ v ? ? ( A ? λ E ) v ? = 0 ? ∣ A ? λ E ∣ = 0 A\vec{v}=\lambda \vec{v}\Rightarrow \left( A-\lambda E \right) \vec{v}=0\Rightarrow \left| A-\lambda E \right|=0 Av=λv?(A?λE)v=0?∣A?λE∣=0
1.3 應用:對角化矩陣——解耦Decouple
P = [ v ? 1 , v ? 2 ] P=\left[ \vec{v}_1,\vec{v}_2 \right] P=[v1?,v2?]—— coordinate transformation matrix
A P = A [ v ? 1 v ? 2 ] = [ A [ v 11 v 12 ] A [ v 21 v 22 ] ] = [ λ 1 v 11 λ 2 v 21 λ 1 v 12 λ 2 v 22 ] = [ v 11 v 21 v 12 v 22 ] [ λ 1 0 0 λ 2 ] = P Λ ? A P = P Λ ? P ? 1 A P = Λ AP=A\left[ \begin{matrix} \vec{v}_1& \vec{v}_2\\ \end{matrix} \right] =\left[ \begin{matrix} A\left[ \begin{array}{c} v_{11}\\ v_{12}\\ \end{array} \right]& A\left[ \begin{array}{c} v_{21}\\ v_{22}\\ \end{array} \right]\\ \end{matrix} \right] =\left[ \begin{matrix} \lambda _1v_{11}& \lambda _2v_{21}\\ \lambda _1v_{12}& \lambda _2v_{22}\\ \end{matrix} \right] =\left[ \begin{matrix} v_{11}& v_{21}\\ v_{12}& v_{22}\\ \end{matrix} \right] \left[ \begin{matrix} \lambda _1& 0\\ 0& \lambda _2\\ \end{matrix} \right] =P\varLambda \\ \Rightarrow AP=P\varLambda \Rightarrow P^{-1}AP=\varLambda AP=A[v1??v2??]=[A[v11?v12??]?A[v21?v22??]?]=[λ1?v11?λ1?v12??λ2?v21?λ2?v22??]=[v11?v12??v21?v22??][λ1?0?0λ2??]=PΛ?AP=PΛ?P?1AP=Λ
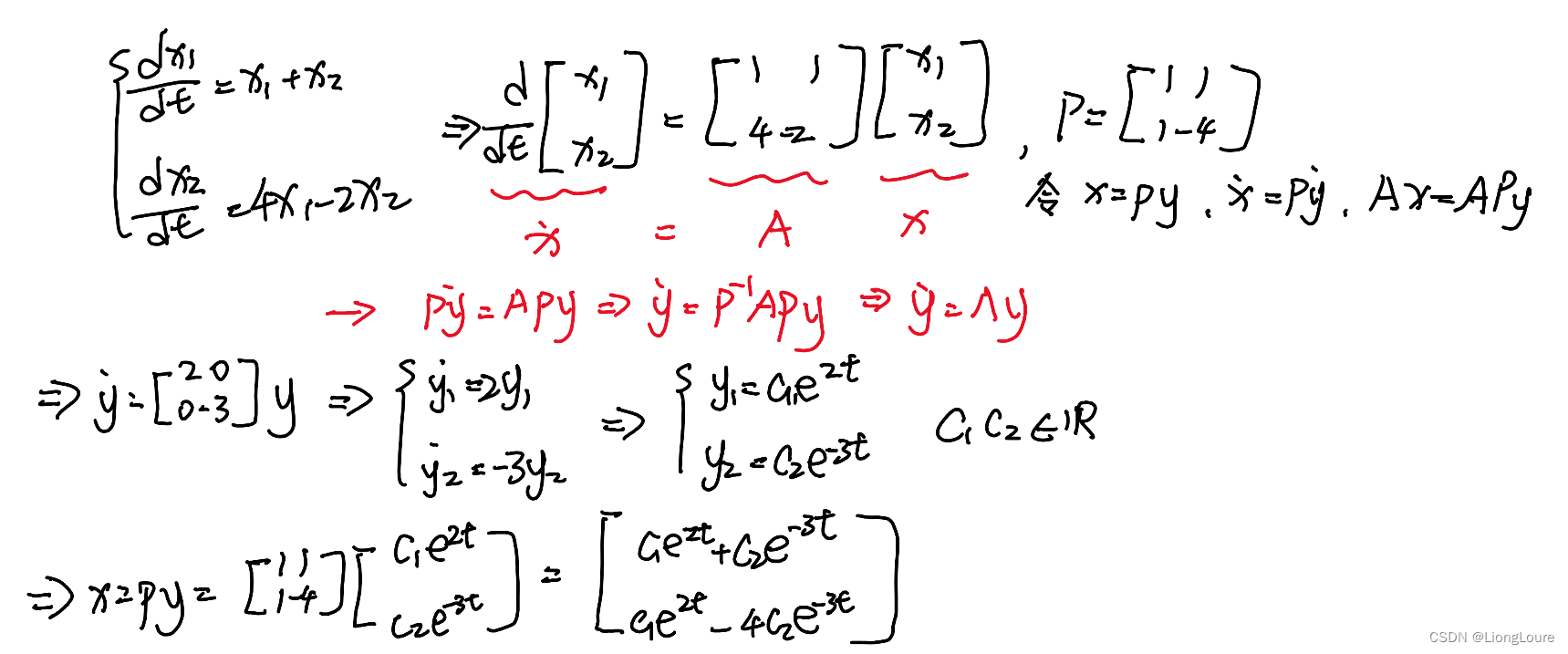
- 微分方程組 state-space rep
2. Summary
- A v ? = λ v ? A\vec{v}=\lambda \vec{v} Av=λv 在一條直線上
- 求解方法: ∣ A ? λ E ∣ = 0 \left| A-\lambda E \right|=0 ∣A?λE∣=0
- P ? 1 A P = Λ , P = [ v ? 1 v ? 2 ? ] , Λ = [ λ 1 λ 2 ? ] P^{-1}AP=\varLambda , P=\left[ \begin{matrix} \vec{v}_1& \vec{v}_2& \cdots\\ \end{matrix} \right] , \varLambda =\left[ \begin{matrix} \lambda _1& & \\ & \lambda _2& \\ & & \ddots\\ \end{matrix} \right] P?1AP=Λ,P=[v1??v2????],Λ= ?λ1??λ2???? ?
- x ˙ = A x , x = P y , y ˙ = Λ y \dot{x}=Ax, x=Py,\dot{y}=\varLambda y x˙=Ax,x=Py,y˙?=Λy




——8)










)



