最終效果
先看下最終效果:
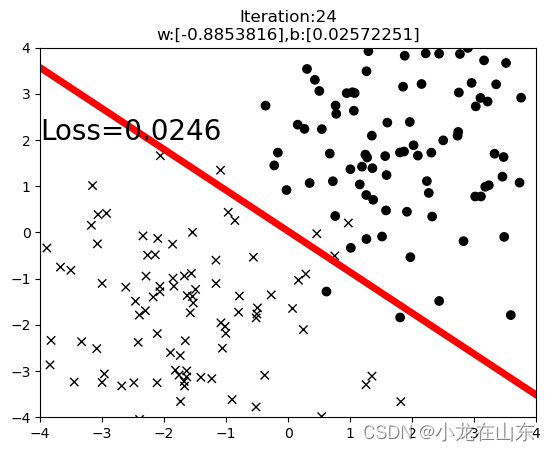
這里用一條直線把二維平面上不同的點分開。
生成隨機數據
#創建訓練數據
x = torch.rand(10,1)*10 #shape(10,1)
y = 2*x + (5 + torch.randn(10,1))#構建線性回歸參數
w = torch.randn((1))#隨機初始化w,要用到自動梯度求導
b = torch.zeros((1))#使用0初始化b,要用到自動梯度求導n_data = torch.ones(100, 2)
xy0 = torch.normal(2 * n_data, 1.5) # 生成均值為2.標準差為1.5的隨機數組成的矩陣
c0 = torch.zeros(100)
xy1 = torch.normal(-2 * n_data, 1.5) # 生成均值為-2.標準差為1.5的隨機數組成的矩陣
c1 = torch.ones(100)x,y = torch.cat((xy0,xy1),0).type(torch.FloatTensor).split(1, dim=1)
x = x.squeeze()
y = y.squeeze()
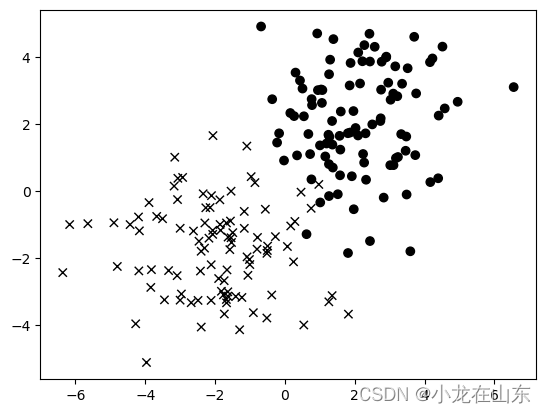
c = torch.cat((c0,c1),0).type(torch.FloatTensor)數據可視化
def plot(x, y, c):ax = plt.gca()sc = ax.scatter(x, y, color='black')paths = []for i in range(len(x)):if c[i].item() == 0:marker_obj = mmarkers.MarkerStyle('o')else:marker_obj = mmarkers.MarkerStyle('x')path = marker_obj.get_path().transformed(marker_obj.get_transform())paths.append(path)sc.set_paths(paths)return sc
plot(x, y, c)
plt.show()
使用x和o來表示兩種不同類別的數據。
定義模型和損失函數
#構建邏輯回歸參數
w = torch.tensor([1.,],requires_grad=True) # 隨機初始化w
b = torch.zeros((1),requires_grad=True) # 使用0初始化bwx = torch.mul(w,x) # w*x
y_pred = torch.add(wx,b) # y = w*x + b
loss = (0.5*(y-y_pred)**2).mean()這里使用了平方損失函數來估算模型準確度。
訓練模型
最多訓練100次,每次都會更新模型參數,當損失值小于0.03時停止訓練。
xx = torch.arange(-4, 5)
lr = 0.02 #學習率
for iteration in range(100):#前向傳播loss = ((torch.sigmoid(x*w+b-y) - c)**2).mean()#反向傳播loss.backward()#更新參數b.data.sub_(lr*b.grad) # b = b - lr*b.gradw.data.sub_(lr*w.grad) # w = w - lr*w.grad#繪圖if iteration % 3 == 0:plot(x, y, c)yy = w*xx + bplt.plot(xx.data.numpy(),yy.data.numpy(),'r-',lw=5)plt.text(-4,2,'Loss=%.4f'%loss.data.numpy(),fontdict={'size':20,'color':'black'})plt.xlim(-4,4)plt.ylim(-4,4)plt.title("Iteration:{}\nw:{},b:{}".format(iteration,w.data.numpy(),b.data.numpy()))plt.show()if loss.data.numpy() < 0.03: # 停止條件break
全部代碼
import torch
import matplotlib.pyplot as plt
import matplotlib.markers as mmarkers#創建訓練數據
x = torch.rand(10,1)*10 #shape(10,1)
y = 2*x + (5 + torch.randn(10,1))#構建線性回歸參數
w = torch.randn((1))#隨機初始化w,要用到自動梯度求導
b = torch.zeros((1))#使用0初始化b,要用到自動梯度求導wx = torch.mul(w,x) # w*x
y_pred = torch.add(wx,b) # y = w*x + bn_data = torch.ones(100, 2)
xy0 = torch.normal(2 * n_data, 1.5) # 生成均值為2.標準差為1.5的隨機數組成的矩陣
c0 = torch.zeros(100)
xy1 = torch.normal(-2 * n_data, 1.5) # 生成均值為-2.標準差為1.5的隨機數組成的矩陣
c1 = torch.ones(100)x,y = torch.cat((xy0,xy1),0).type(torch.FloatTensor).split(1, dim=1)
x = x.squeeze()
y = y.squeeze()
c = torch.cat((c0,c1),0).type(torch.FloatTensor)def plot(x, y, c):ax = plt.gca()sc = ax.scatter(x, y, color='black')paths = []for i in range(len(x)):if c[i].item() == 0:marker_obj = mmarkers.MarkerStyle('o')else:marker_obj = mmarkers.MarkerStyle('x')path = marker_obj.get_path().transformed(marker_obj.get_transform())paths.append(path)sc.set_paths(paths)return sc
plot(x, y, c)
plt.show()#構建邏輯回歸參數
w = torch.tensor([1.,],requires_grad=True)#隨機初始化w
b = torch.zeros((1),requires_grad=True)#使用0初始化bwx = torch.mul(w,x) # w*x
y_pred = torch.add(wx,b) # y = w*x + b
loss = (0.5*(y-y_pred)**2).mean()xx = torch.arange(-4, 5)
lr = 0.02 #學習率
for iteration in range(100):#前向傳播loss = ((torch.sigmoid(x*w+b-y) - c)**2).mean()#反向傳播loss.backward()#更新參數b.data.sub_(lr*b.grad) # b = b - lr*b.gradw.data.sub_(lr*w.grad) # w = w - lr*w.grad#繪圖if iteration % 3 == 0:plot(x, y, c)yy = w*xx + bplt.plot(xx.data.numpy(),yy.data.numpy(),'r-',lw=5)plt.text(-4,2,'Loss=%.4f'%loss.data.numpy(),fontdict={'size':20,'color':'black'})plt.xlim(-4,4)plt.ylim(-4,4)plt.title("Iteration:{}\nw:{},b:{}".format(iteration,w.data.numpy(),b.data.numpy()))plt.show()if loss.data.numpy() < 0.03:#停止條件break

)



- ACodec(二))



)



![讓內存無處可逃:智能指針[C++11]](http://pic.xiahunao.cn/讓內存無處可逃:智能指針[C++11])
Docker引擎)

)
)

