1?輸出比較
1.1?輸出比較簡介
- OC(Output Compare)輸出比較;IC(Input?Capture)輸入捕獲;CC(Capture/Compare)輸入捕獲和輸出比較的單元
- 輸出比較可以通過比較CNT與CCR寄存器值(CCR捕獲/比較寄存器)的關系,來對輸出電平進行置1、置0或翻轉的操作,用于輸出一定頻率和占空比的PWM波形
- 每個高級定時器和通用定時器都擁有4個輸出比較通道
- 高級定時器的前3個通道額外擁有死區生成和互補輸出的功能
主要是用來輸出PWM波形的,PWM波形又是驅動電機的必要條件。
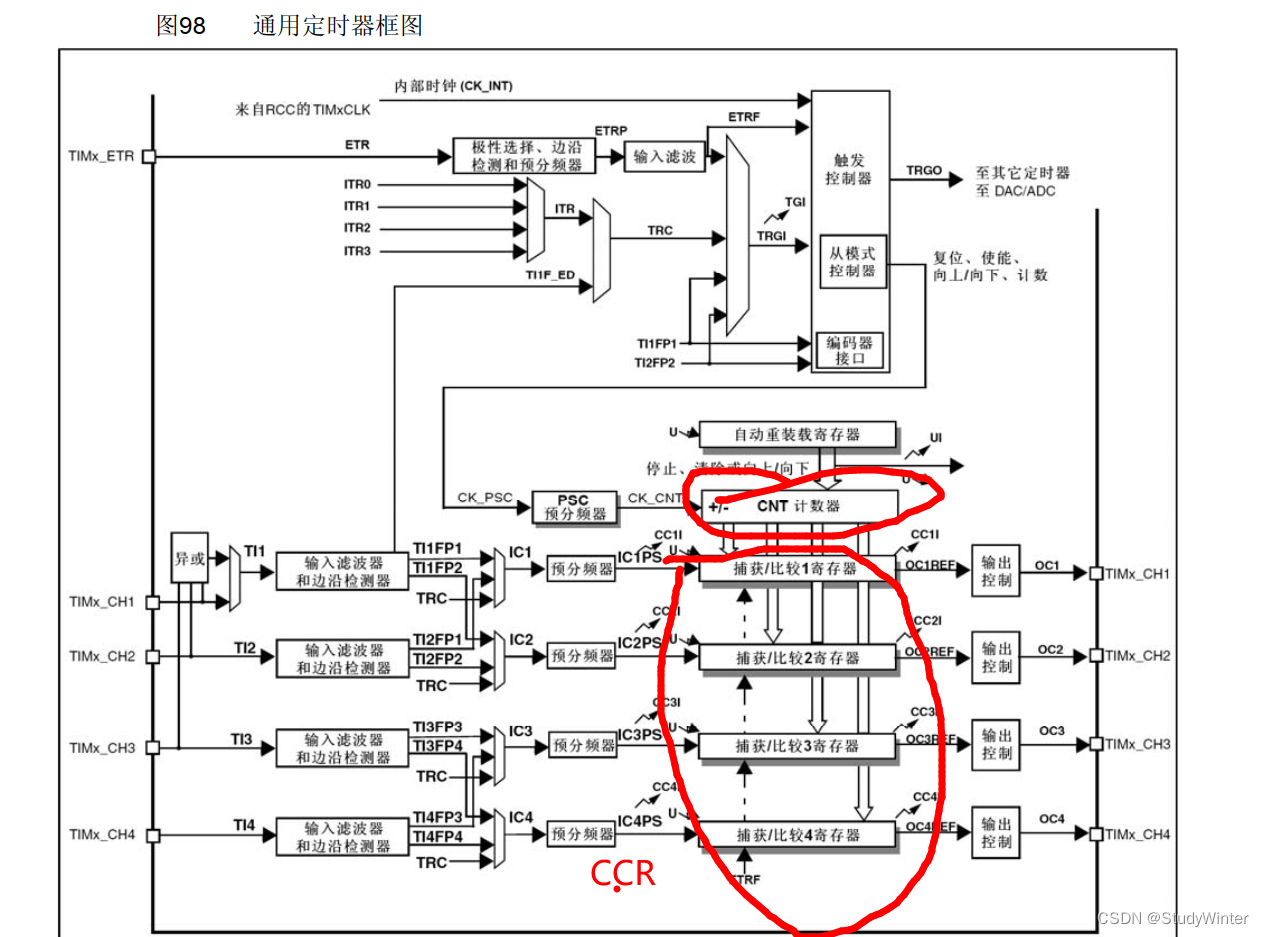
這個CCR是共用的,當使用輸入捕獲時,它就是捕獲寄存器;當使用輸出比較時,它就是比較寄存器。在輸出比較這里,這塊電路會比較CNT和CCR的值,CNT計數自增,CCR是我們給定的一個值,當CNT大于CCR、小于CCR、等于CCR時,輸出就會置1,置0,置1,置0,這樣就可以輸出一個電平不斷跳變的PWM波形了。
1.2?PWM簡介
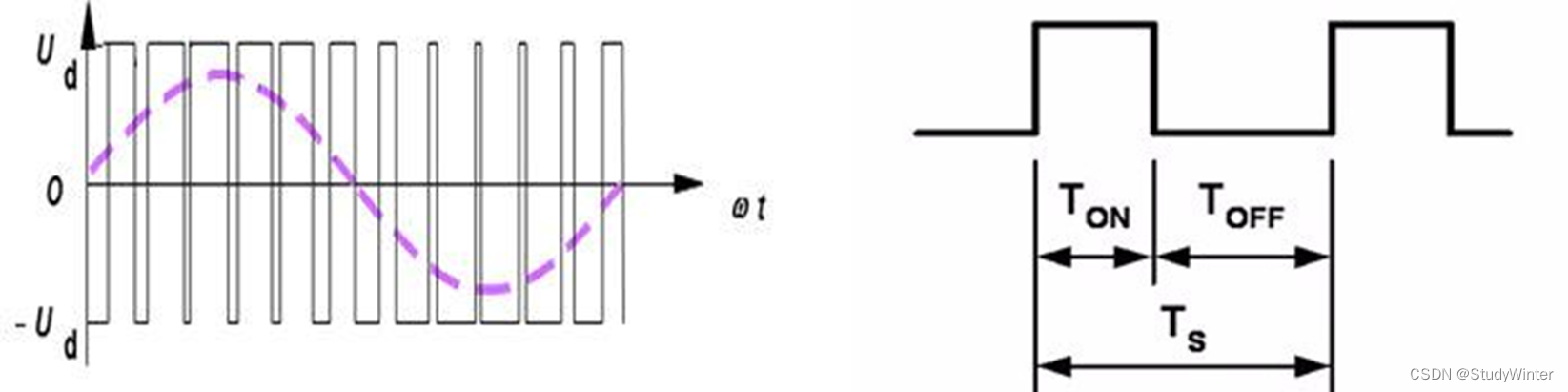
PWM(Pulse Width Modulation)脈沖寬度調制
在具有慣性的系統中,可以通過對一系列脈沖的寬度進行調制,來等效地獲得所需要的模擬參量,常應用于電機控速等領域
PWM參數:
???? 頻率 = 1 / TS??????????? 占空比 = TON / TS?????????? 分辨率 = 占空比變化步距
1.3?輸出比較通道
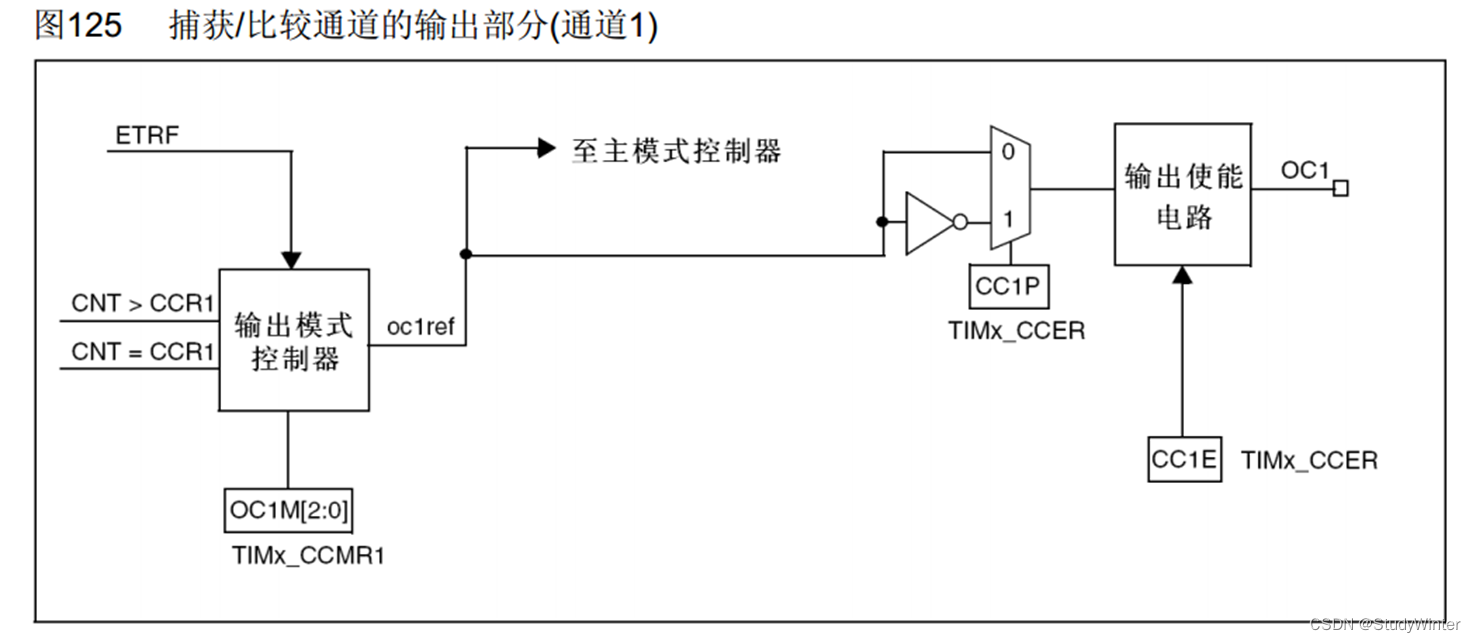
通用定時器的輸出比較部分電路
對應的是

?最后通過TIMx_CH1輸出到GPIO引腳上。
左邊是CNT計數器和CCR1第一路的捕獲/比較寄存器;它倆比較,當CNT > CCR1?或者?CNT = CCR1時,就會給輸出模式控制器傳一個信號,然后輸出模式控制器就會改變它輸出OC1REF(reference參考信號)的高低電平;接下來可以把OC1REF映射到主模式的TRGO輸出上去;不過REF的主要去向還是走下面。
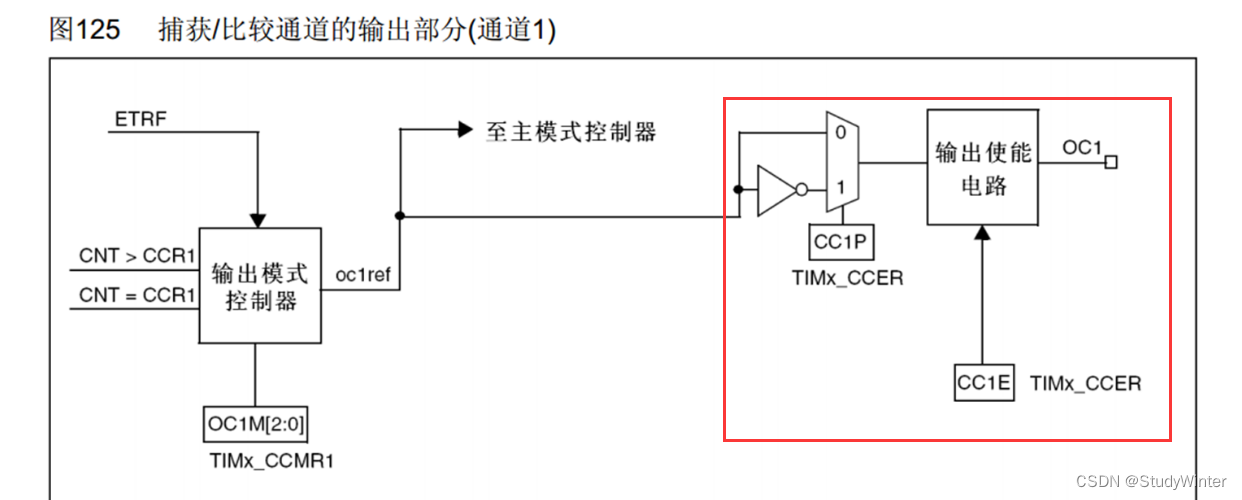
這是一個極性選擇,給這個寄存器寫0,信號就會往上走,就是信號電平不反轉;寫1的話,信號就會往下走,信號會通過一個非門取反,輸出的信號就會發生反轉。最后就是OC1引腳,這個引腳是CH1通道的引腳,在引腳定義中就可以具體知道是哪個GPIO了。
輸出模式控制器的工作:輸出比較模式,通過寄存器來配置。
| 模式 | 描述 |
| 凍結 | CNT=CCR時(無效),REF保持為原狀態 |
| 匹配時置有效電平 | CNT=CCR時,REF置有效電平(高電平),一次性的 |
| 匹配時置無效電平 | CNT=CCR時,REF置無效電平(低電平),一次性的 |
| 匹配時電平翻轉 | CNT=CCR時,REF電平翻轉 |
| 強制為無效電平 | CNT與CCR無效,REF強制為無效電平。在暫停期間保持高電平 |
| 強制為有效電平 | CNT與CCR無效,REF強制為有效電平。在暫停期間保持低電平 |
| PWM模式1 | 向上計數:CNT<CCR時,REF置有效電平,CNT≥CCR時,REF置無效電平 向下計數:CNT>CCR時,REF置無效電平,CNT≤CCR時,REF置有效電平 |
| PWM模式2 | 向上計數:CNT<CCR時,REF置無效電平,CNT≥CCR時,REF置有效電平 向下計數:CNT>CCR時,REF置有效電平,CNT≤CCR時,REF置無效電平 |
(1)凍結模式:輸出暫停;
(2)匹配時置有效電平、匹配時置無效電平、匹配時電平翻轉:有效/無效電平一般是高級定時器的說法;簡單理解有效電平是高電平,無效電平是低電平。
(3)PWM模式
PWM模式2是PWM模式1的取反。
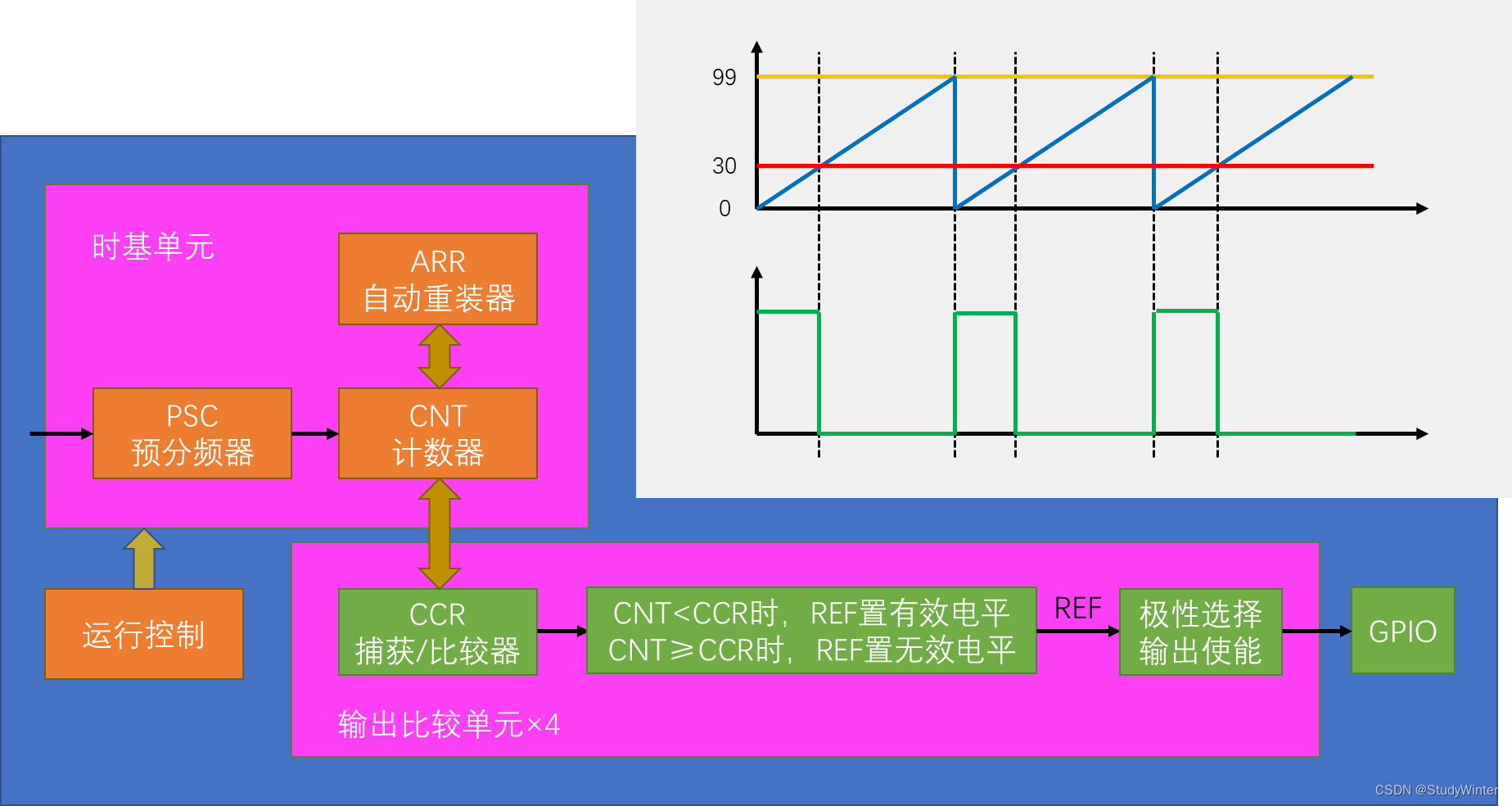
1.4?PWM基本結構

?左上角是時基單元和控制部分,輸出PWM暫時不需要中斷。下面就是輸出比較單元了,總共有4路。輸出比較單元的最開始,是CCR捕獲/比較寄存器,CCR是我們自己設定的,CNT不斷自增運行,同時它倆還在不斷比較,后面是輸出模式控制器(PWM模式1)。

藍色線是CNT的值,黃色線是ARR的值,CNT(藍色線)從0開始自增,一直增到ARR的值,之后清零繼續自增。在這個過程中再設置一條紅線(CCR的值),之后再執行【CNT<CCR時,REF置有效電平;CNT≥CCR時,REF置無效電平】,下面綠色部分是輸出。
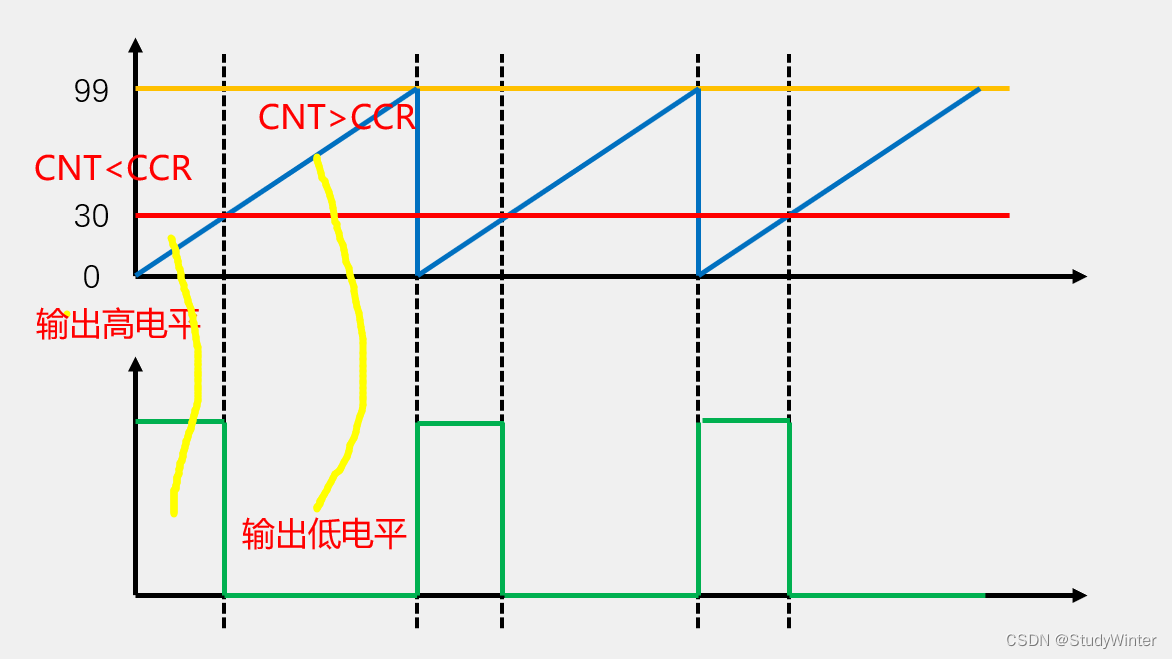
CNT<CCR時,REF置有效電平;CNT≥CCR時,REF置無效電平。并且它的占空比是受CCR值調控的;如果CCR設置高一些,輸出占空比就大一些。
1.5?參數計算

PWM頻率:? Freq = CK_PSC / (PSC + 1) / (ARR + 1)
對應著計數器的一個溢出更新周期,PWM的頻率等于計數器的更新頻率。
PWM占空比:? Duty = CCR / (ARR + 1)
PWM分辨率:? Reso = 1 / (ARR + 1)
輸出一個頻率為1KHz,占空比可以任意調控,切分辨率為1%的PWM波形
Reso = 1 / (ARR + 1) = 1% =====》ARR = 99
Duty = CCR / (ARR + 1) = CCR / 100? =====》?CCR = [0, 100]
Freq = CK_PSC / (PSC + 1) / (ARR + 1) = 1000 =====》?CK_PSC / (PSC + 1) = 100000
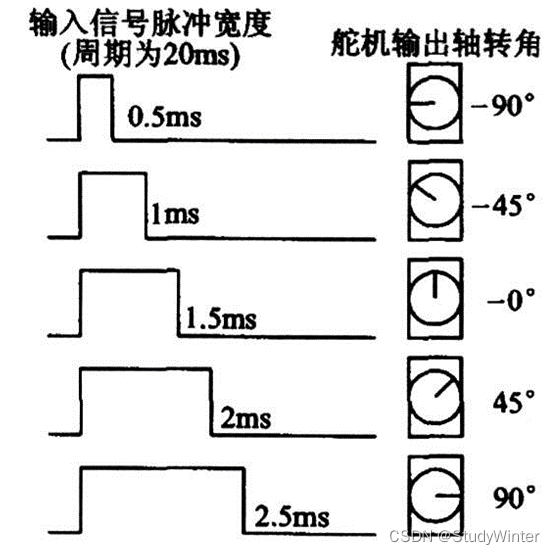
1.6?舵機簡介
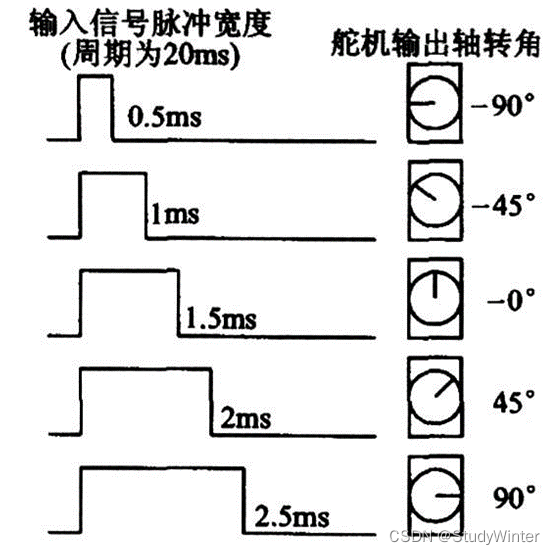
舵機是一種根據輸入PWM信號占空比來控制輸出角度的裝置
輸入PWM信號要求:周期為20ms,高電平寬度為0.5ms~2.5ms
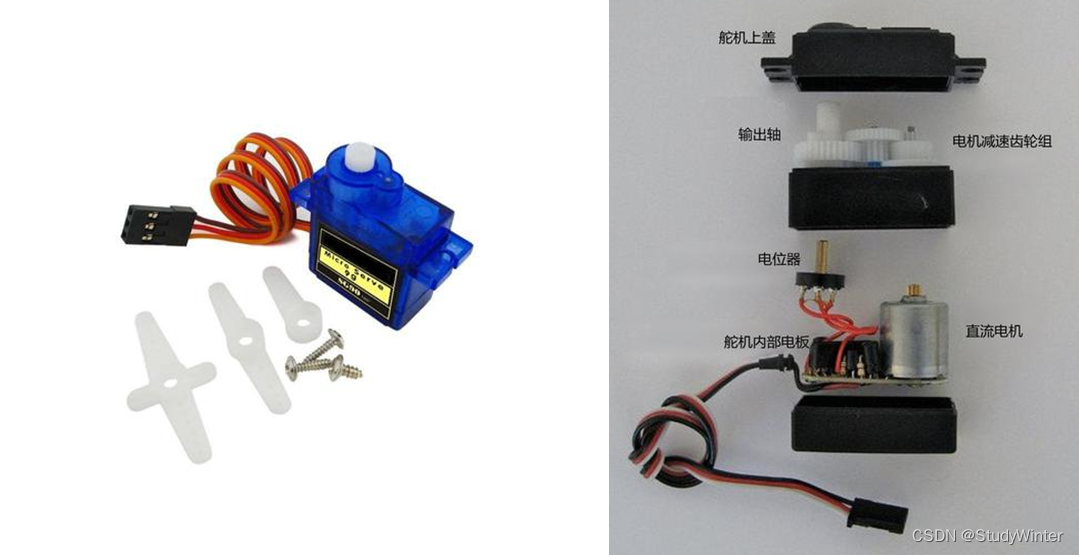
大概的執行邏輯:PWM信號輸入到控制板,給控制板一個指定的目標角度,然后電位器會檢測輸出軸的當前角度;如果大于目標角度,電機就會反轉;否則正轉。最終使輸出軸固定在指定角度。
1.6.1?舵機硬件電路
1.7?直流電機
直流電機是一種將電能轉換為機械能的裝置,有兩個電極,當電極正接時,電機正轉,當電極反接時,電機反轉
直流電機屬于大功率器件,GPIO口無法直接驅動,需要配合電機驅動電路來操作
TB6612是一款雙路H橋型的直流電機驅動芯片,可以驅動兩個直流電機并且控制其轉速和方向

1.7.1?硬件電路
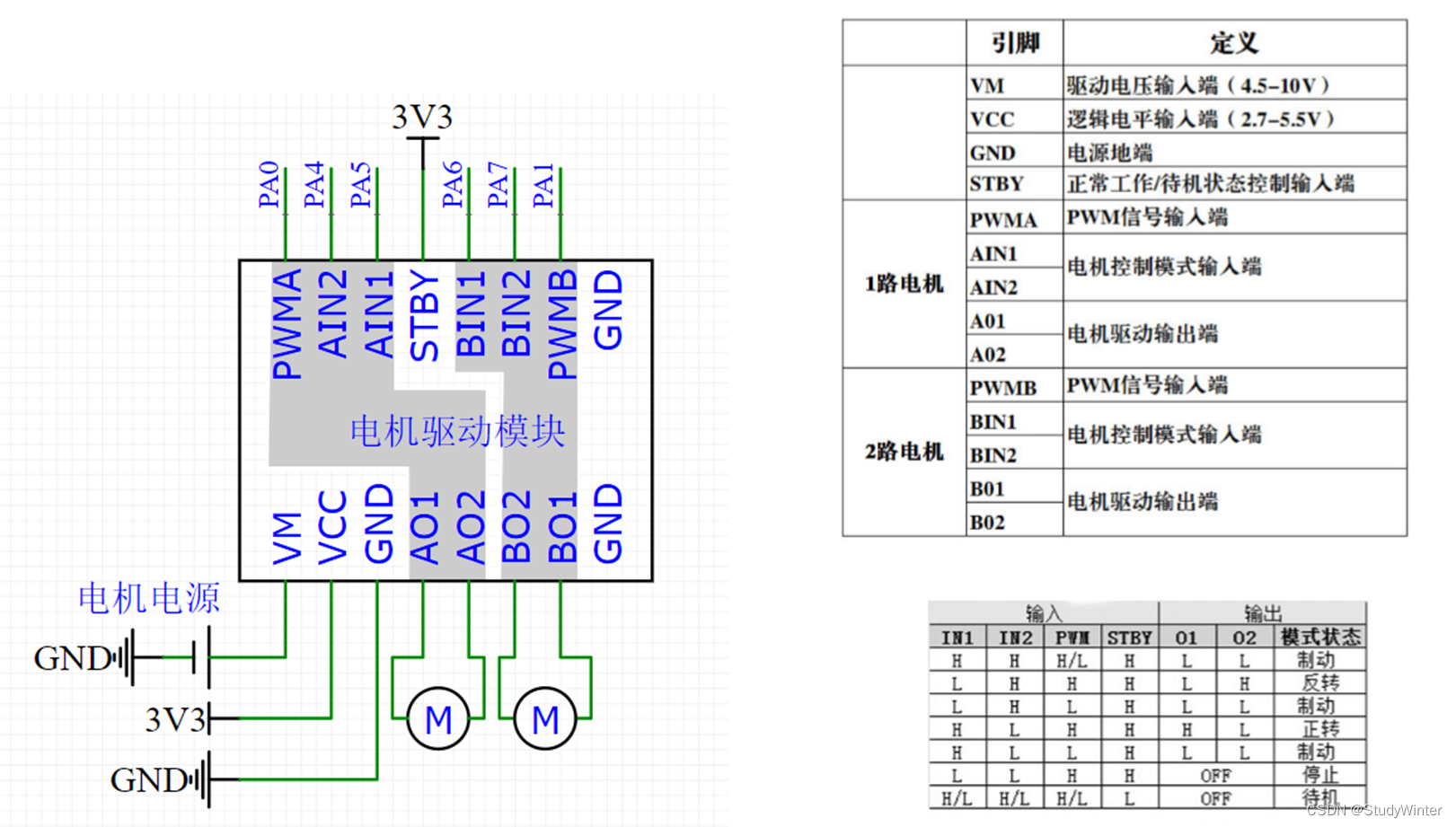
看圖和引腳說明,很清晰。
STBY引腳是待機控制引腳。如果接GND,芯片就不工作,處于待機狀態;如果接邏輯電源VCC,芯片就正常工作。
看手冊
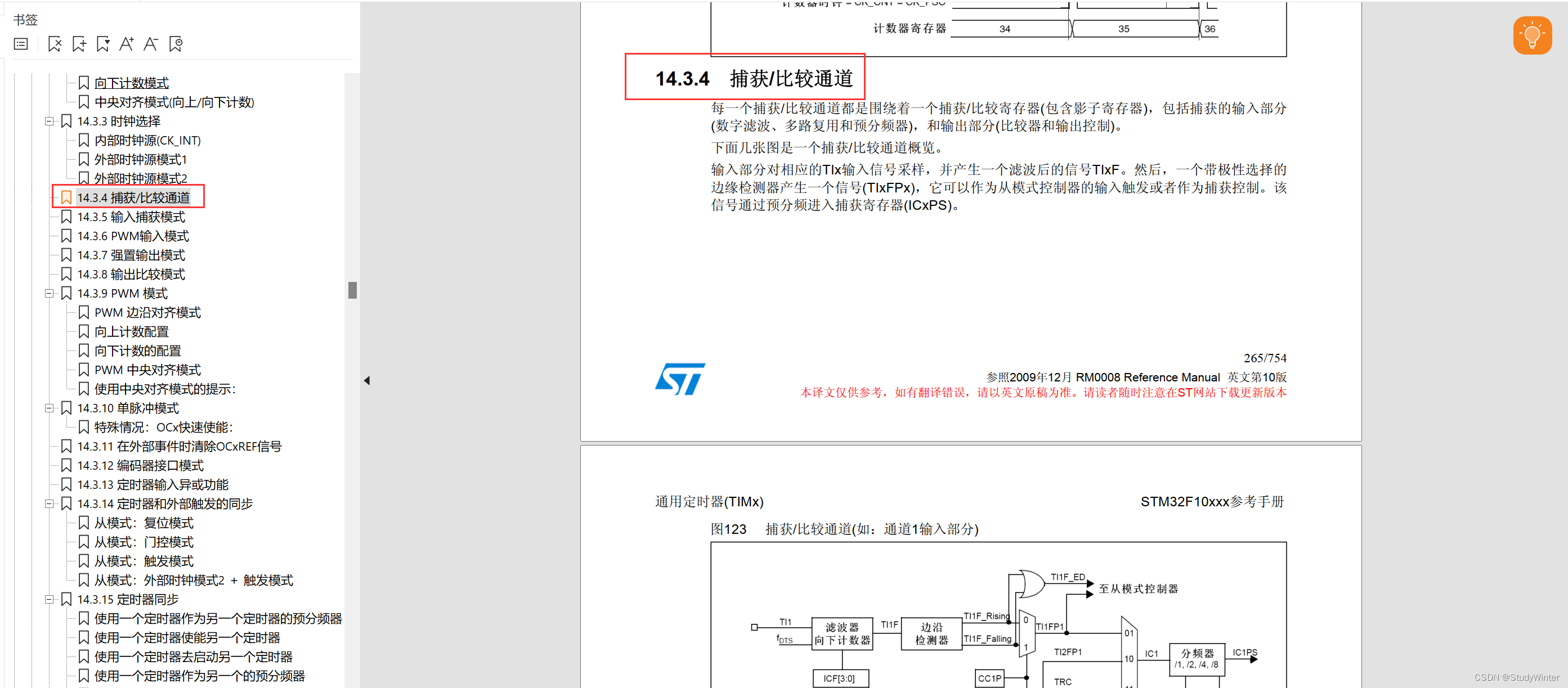
強置輸出模式:CNT和CCR無效,REF強制為高和低的那兩種模式
輸出比較模式:CNT=CCR時,REF凍結、置高、置低、反轉那四種模式
PWM 模式:CNT > CCR或者CNT < CCR時,REF置高或者置低的那兩種模式。
2?TIM輸出比較之PWM驅動LED呼吸燈
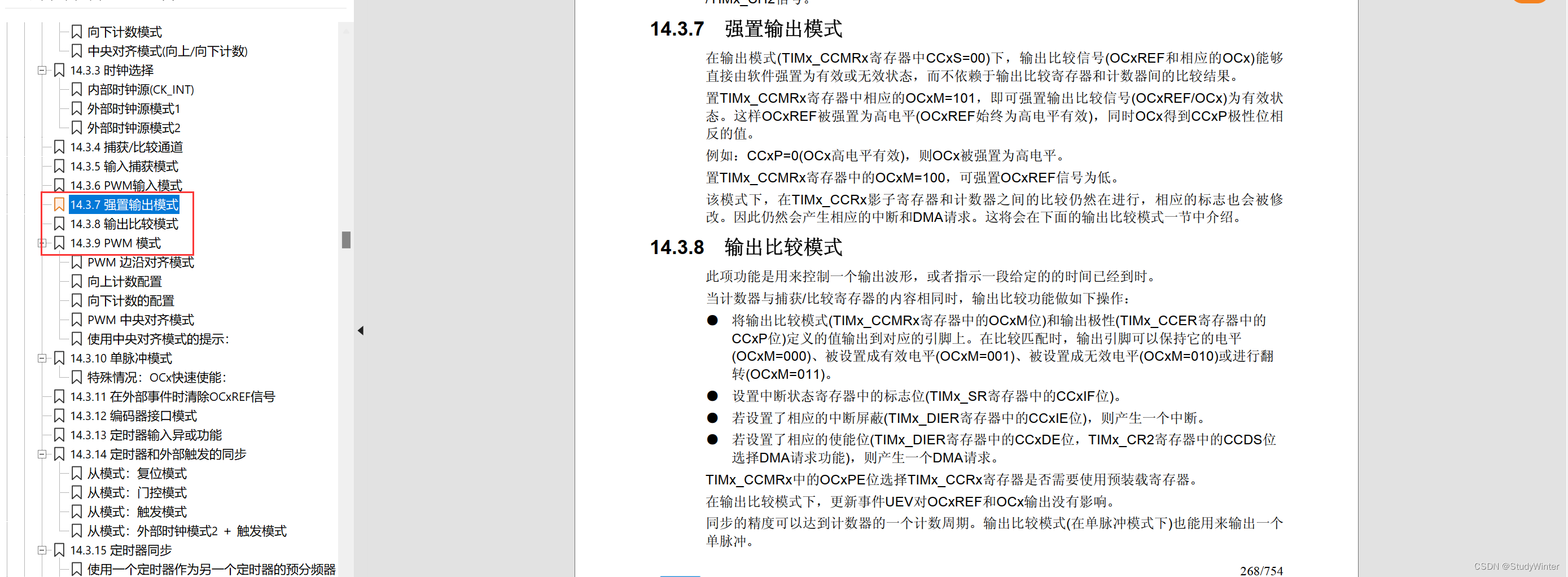
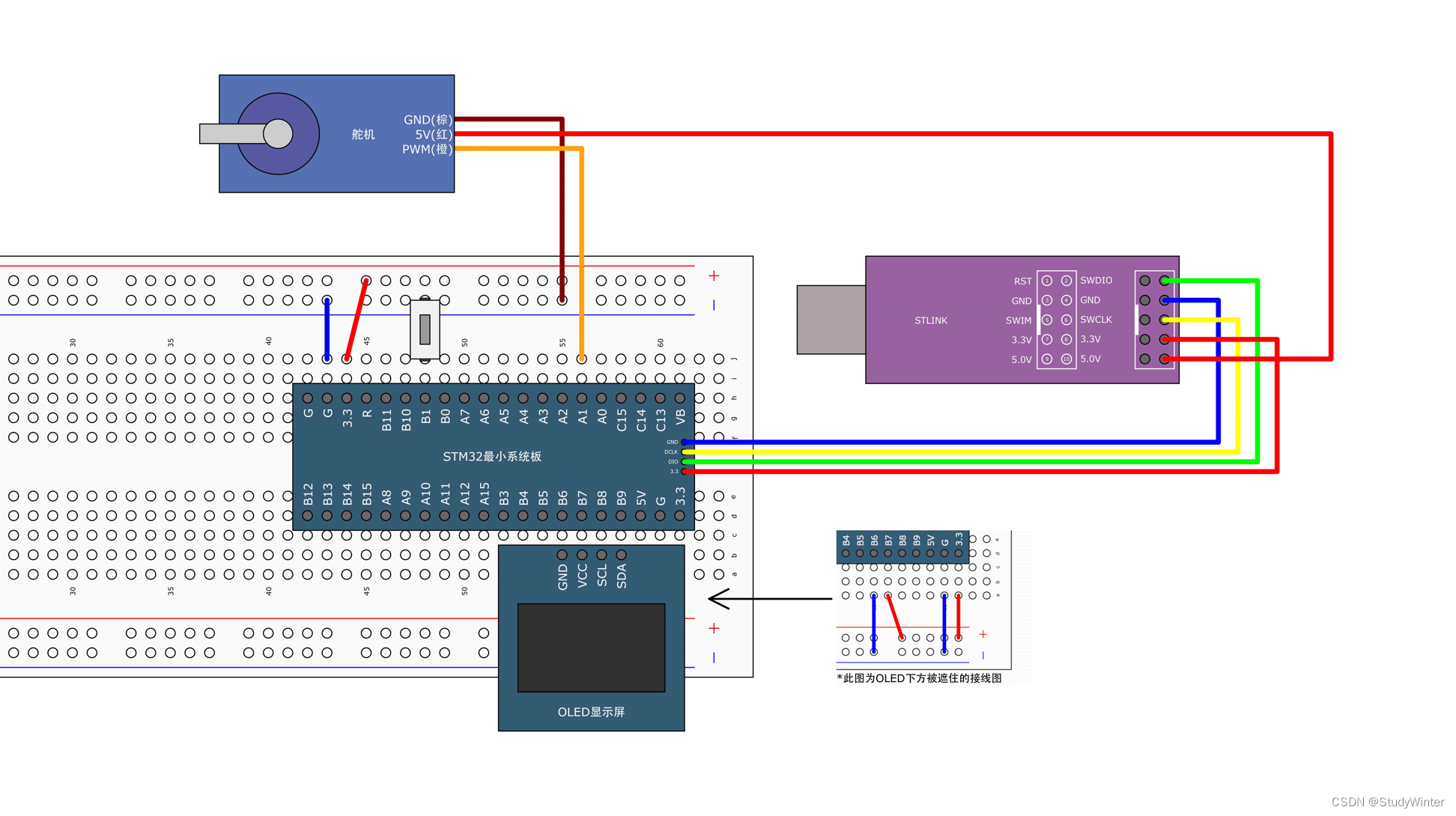
2.1?接線圖
注意這里:高電平點亮,低電平熄滅。即占空比越大,LED越亮;占空比越小,LED越暗。
2.2?封裝模塊
按這個流程圖進行初始化
先看輸出比較相關的函數
// 這4個函數是用來配置輸出比較的
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);// 用來給輸出比較結構體賦值一個默認值的
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);// 僅高級定時器使用,在使用高級定時器輸出PWM時,需要用這個函數使能主輸出;否則PWM將不能正常輸出
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);// 用來配置強制輸出模式的。強制輸出高電平和輸出設置100%占空比一樣
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);// 配置CCR寄存器的預裝功能,就是影子寄存器;寫入的值不會立即生效,在更新事件才會生效
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);// 配置快速使能的
void TIM_OC1FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC2FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC3FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC4FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);// 外部事件時清除ref信號
void TIM_ClearOC1Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC2Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC3Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC4Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);// 單獨設置輸出比較極性的
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC2PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC2NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC3PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC3NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);// 單獨修改輸出使能參數的
void TIM_CCxCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCx);
void TIM_CCxNCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCxN);// 選擇輸出比較模式
void TIM_SelectOCxM(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_OCMode);// 單獨更改RCC寄存器的值
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);要掌握的
// 這4個函數是用來配置輸出比較的
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);// 單獨更改RCC寄存器的值
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
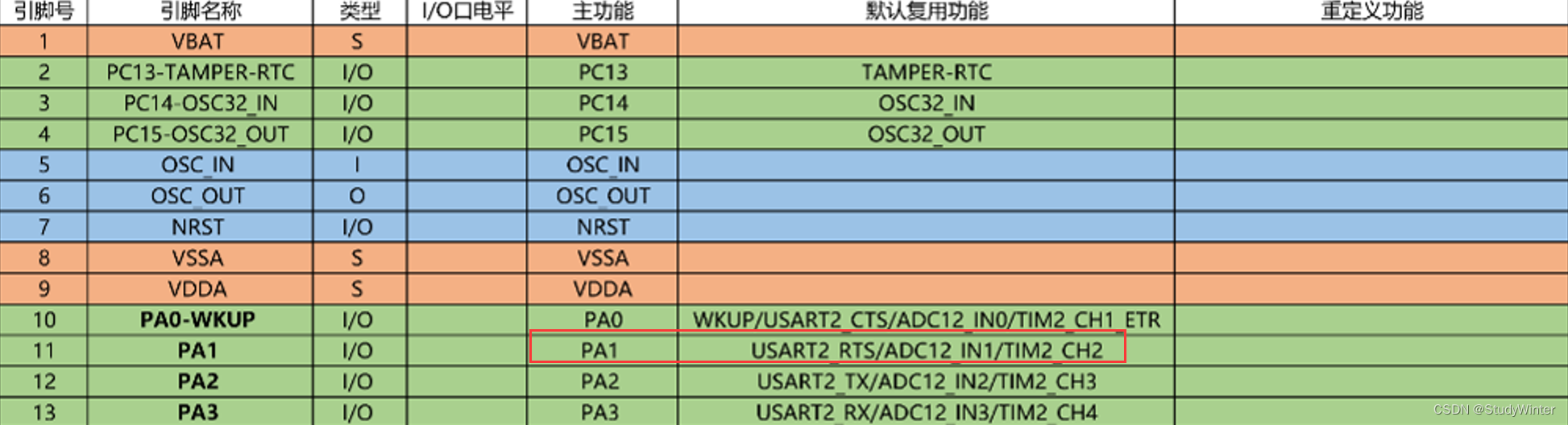
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);看這個圖
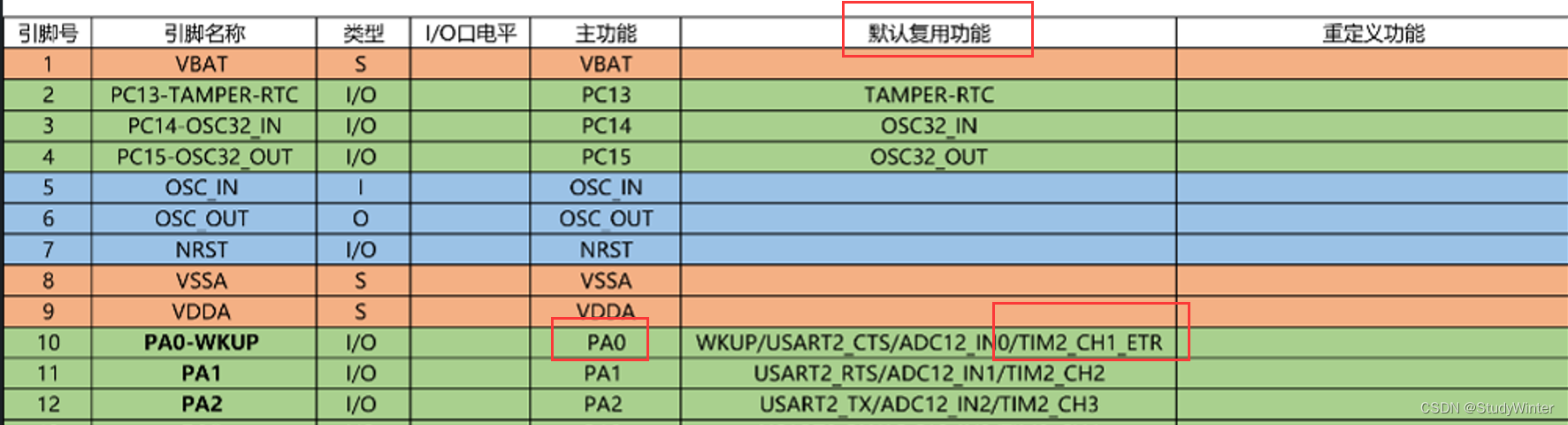
有TIM2_CH1_ETR在PA0這一行,說明TIM2的ETR引腳和通道1的引腳都是借用了PA0引腳,換句話,TIM2的引腳復用到了PA0引腳上,所以如果要使用TIM2的OC1也就是CH1t通道,輸出PWM那它就只能在PA0的引腳輸出,不能任意接。同樣,TIM2的CH2對應PA1。。。。。。
還可以修改

計算:頻率1kHz,占空比50% ,分辨率為1%。
PWM分辨率:?? ?Reso = 1 / (ARR + 1) = 1% ? ? ??? ??? ??? ??? ??? ??? ????????????==> ARR= 100 - 1
PWM占空比:?? ?Duty = CCR / (ARR + 1) = 50% ? ?? ??? ??? ??? ??? ??? ?????????==> CCR = 50
PWM頻率:?? ?Freq = CK_PSC(72M) / (PSC + 1) / (ARR + 1) = 1K ??? ?==> PSC = 720 - 1
// 2配置時基單元(預分頻器、自動重裝器、計數模式等)// ...TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; // ARR自動重裝器的值 兩個合起來計數0.1秒TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; // PSC預分頻器的值,720分頻,得到100k計數TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);// 3配置輸出比較單元(CCR的值、輸出比較模式、極性選擇、輸出使能)TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure); // 先初始化,后面再按需修改// ...TIM_OCInitStructure.TIM_Pulse = 0; // CCR的值w為50,先設置為0,后面變化// 這個函數的選擇按照GPIO口需求來,PA0口對應的是第一個輸出比較通道TIM_OC1Init(TIM2, &TIM_OCInitStructure);PWM.c
#include "stm32f10x.h" // Device header// PWM初始化函數
void PWM_Init(void)
{// 1RCC開啟時鐘RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_InternalClockConfig(TIM2);// 2配置時基單元(預分頻器、自動重裝器、計數模式等)TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 時鐘分頻,影響不大TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 計數模式,向上計數TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重復計數器的值// 關鍵參數TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; // ARR自動重裝器的值 兩個合起來計數0.1秒TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; // PSC預分頻器的值,720分頻,得到100k計數TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);// 3配置輸出比較單元(CCR的值、輸出比較模式、極性選擇、輸出使能)TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure); // 先初始化,后面再按需修改TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 輸出比較模式,PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 輸出比較極性,高級性,極性不反轉,有效電平是高電平TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 輸出狀態輸出使能TIM_OCInitStructure.TIM_Pulse = 0; // CCR的值w為50,先設置為0,后面變化// 這個函數的選擇按照GPIO口需求來,PA0口對應的是第一個輸出比較通道TIM_OC1Init(TIM2, &TIM_OCInitStructure);// 頻率1kHz,占空比50% ,分辨率為1%。 CCR = 50 ,/**PWM分辨率: Reso = 1 / (ARR + 1) = 1% ==> ARR= 100 - 1PWM占空比: Duty = CCR / (ARR + 1) = 50% ==> CCR = 50PWM頻率: Freq = CK_PSC(72M) / (PSC + 1) / (ARR + 1) = 1K ==> PSC = 720 - 1*/// 4配置GPIO(初始化為復用推挽輸出,參考引腳定義表)RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 復用推挽輸出。定時器控制引腳,輸出控制權轉移給片上外設GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 5運行控制,啟動計數器TIM_Cmd(TIM2, ENABLE);
}// 更改通道1的CCR值
void PWM_SetCompare1(uint16_t Compare)
{TIM_SetCompare1(TIM2, Compare);
}
2.3?主函數
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"uint8_t i;int main()
{OLED_Init(); // 初始化OLEDPWM_Init(); // PWM初始化OLED_ShowString(1, 1, "Hello");while (1){// 點亮for (i = 0; i <= 100; i++){PWM_SetCompare1(i);Delay_ms(10);}// 熄滅for (i = 0; i <= 100; i++) {PWM_SetCompare1(100 - i);Delay_ms(10);}}
}
現象:接在PA0號口的燈如呼吸一般亮滅
復用到PA15
PWM.c
#include "stm32f10x.h" // Device header// PWM初始化函數
void PWM_Init(void)
{// 1RCC開啟時鐘RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_InternalClockConfig(TIM2);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); // 重映射使用AFIOGPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); // 部分重映射PA15GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); // 解除調試端口// 2配置時基單元(預分頻器、自動重裝器、計數模式等)TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 時鐘分頻,影響不大TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 計數模式,向上計數TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重復計數器的值// 關鍵參數TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; // ARR自動重裝器的值 兩個合起來計數0.1秒TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; // PSC預分頻器的值,720分頻,得到100k計數TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);// 3配置輸出比較單元(CCR的值、輸出比較模式、極性選擇、輸出使能)TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure); // 先初始化,后面再按需修改TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 輸出比較模式,PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 輸出比較極性,高級性,極性不反轉,有效電平是高電平TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 輸出狀態輸出使能TIM_OCInitStructure.TIM_Pulse = 0; // CCR的值w為50,先設置為0,后面變化// 這個函數的選擇按照GPIO口需求來,PA0口對應的是第一個輸出比較通道TIM_OC1Init(TIM2, &TIM_OCInitStructure);// 頻率1kHz,占空比50% ,分辨率為1%。 CCR = 50 ,/**PWM分辨率: Reso = 1 / (ARR + 1) = 1% ==> ARR= 100 - 1PWM占空比: Duty = CCR / (ARR + 1) = 50% ==> CCR = 50PWM頻率: Freq = CK_PSC(72M) / (PSC + 1) / (ARR + 1) = 1K ==> PSC = 720 - 1*/// 4配置GPIO(初始化為復用推挽輸出,參考引腳定義表)RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 復用推挽輸出。定時器控制引腳,輸出控制權轉移給片上外設
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 5運行控制,啟動計數器TIM_Cmd(TIM2, ENABLE);
}// 更改通道1的CCR值
void PWM_SetCompare1(uint16_t Compare)
{TIM_SetCompare1(TIM2, Compare);
}
3 TIM輸出比較之PWM驅動舵機
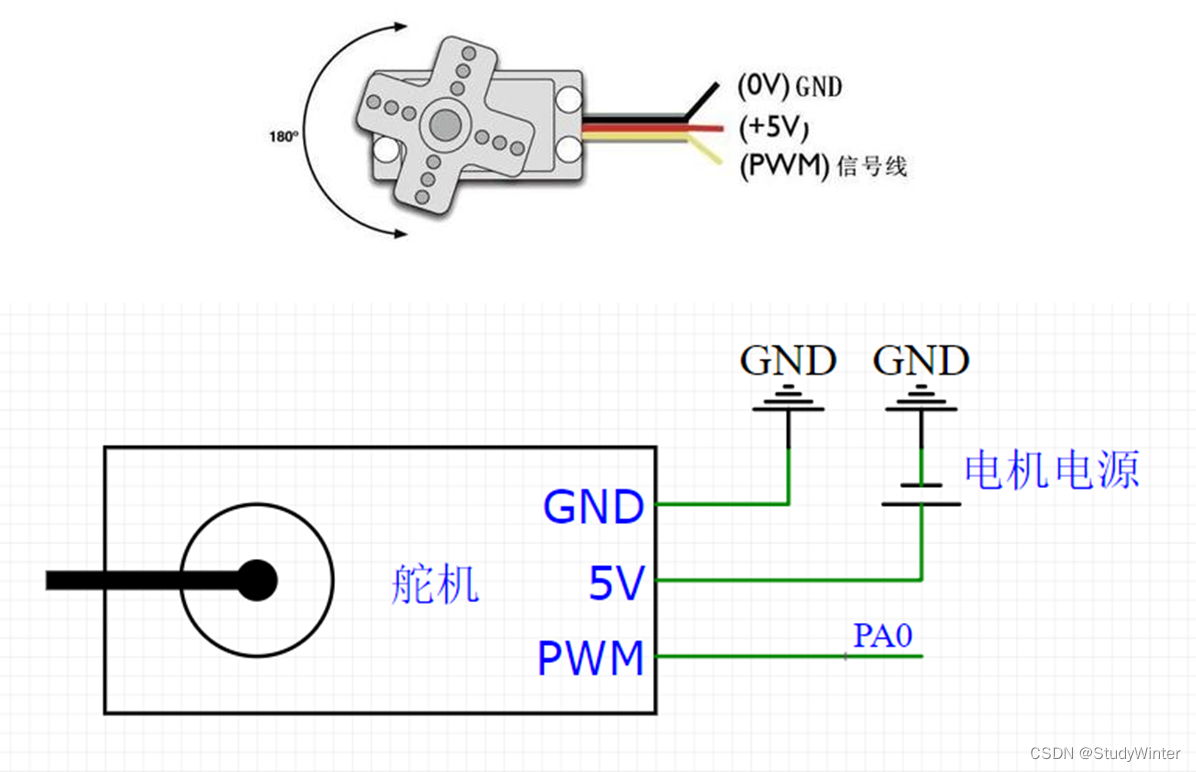
3.1?接線圖
注意顏色
3.2?模塊封裝
輸入PWM信號要求:周期為20ms,高電平寬度為0.5ms~2.5ms
// 輸入PWM信號要求:周期為20ms(50Hz),高電平寬度為0.5ms~2.5ms,占空比[2.5%, 12.5%]/**PWM分辨率: Reso = 1 / (ARR + 1)PWM占空比: Duty = CCR / (ARR + 1)PWM頻率: Freq = CK_PSC(72M) / (PSC + 1) / (ARR + 1)PSC = 72 - 1ARR = 20000 - 1CCR的范圍是[500, 2500]*/現在使用的是PA1的通道2
PWM.c
#include "stm32f10x.h" // Device header// PWM初始化函數
void PWM_Init(void)
{// 1RCC開啟時鐘RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_InternalClockConfig(TIM2);// 2配置時基單元(預分頻器、自動重裝器、計數模式等)TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 時鐘分頻,影響不大TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 計數模式,向上計數TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重復計數器的值// 關鍵參數TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; // ARR自動重裝器的值 兩個合起來計數0.1秒TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; // PSC預分頻器的值,72分頻,得到100k計數TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);// 3配置輸出比較單元(CCR的值、輸出比較模式、極性選擇、輸出使能)TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure); // 先初始化,后面再按需修改TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 輸出比較模式,PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 輸出比較極性,高級性,極性不反轉,有效電平是高電平TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 輸出狀態輸出使能TIM_OCInitStructure.TIM_Pulse = 0; // CCR的值w為50,先設置為0,后面變化// 這個函數的選擇按照GPIO口需求來,PA1口對應的是第二個輸出比較通道TIM_OC2Init(TIM2, &TIM_OCInitStructure);// 輸入PWM信號要求:周期為20ms(50Hz),高電平寬度為0.5ms~2.5ms,占空比[2.5%, 12.5%]/**PWM分辨率: Reso = 1 / (ARR + 1)PWM占空比: Duty = CCR / (ARR + 1)PWM頻率: Freq = CK_PSC(72M) / (PSC + 1) / (ARR + 1)PSC = 72 - 1ARR = 20000 - 1CCR的范圍是[500, 2500]*/// 4配置GPIO(初始化為復用推挽輸出,參考引腳定義表)RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 復用推挽輸出。定時器控制引腳,輸出控制權轉移給片上外設GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 5運行控制,啟動計數器TIM_Cmd(TIM2, ENABLE);
}// 更改通道2的CCR值
void PWM_SetCompare2(uint16_t Compare)
{TIM_SetCompare2(TIM2, Compare);
}
Servo.c
#include "stm32f10x.h" // Device header
#include "PWM.h"// 舵機模塊
void Servo_Init(void)
{PWM_Init(); // 初始化PWM模塊
}// 設置舵機角度。即改CCR的值
void Servo_SetAngle(float angle)
{// 0° 500// 180 2500PWM_SetCompare2(angle / 180 * 2000 + 500);
}
3.3?主函數
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Key.h"
#include "OLED.h"
#include "Servo.h"uint8_t keyNum;
float angle;int main()
{OLED_Init(); // 初始化OLED_ShowString(1, 1, "angle:"); // 顯示字符串Servo_Init();KEY_Init();while (1){keyNum = KEY_GetNum(); // 讀按鍵if (keyNum == 1){angle += 30;if (angle > 180){angle = 0;}}Servo_SetAngle(angle); // 設置舵機角度(設置CCR的值)OLED_ShowNum(1, 7, angle, 3);}
}
現象:按按鍵,舵機從0°開始,每次轉動30°,當大于180°時,回到0°
輸入PWM信號要求:周期為20ms,高電平寬度為0.5ms~2.5ms
通過修改CCR的值,改變占空比,進而輸出不同占空比的PWM波形。
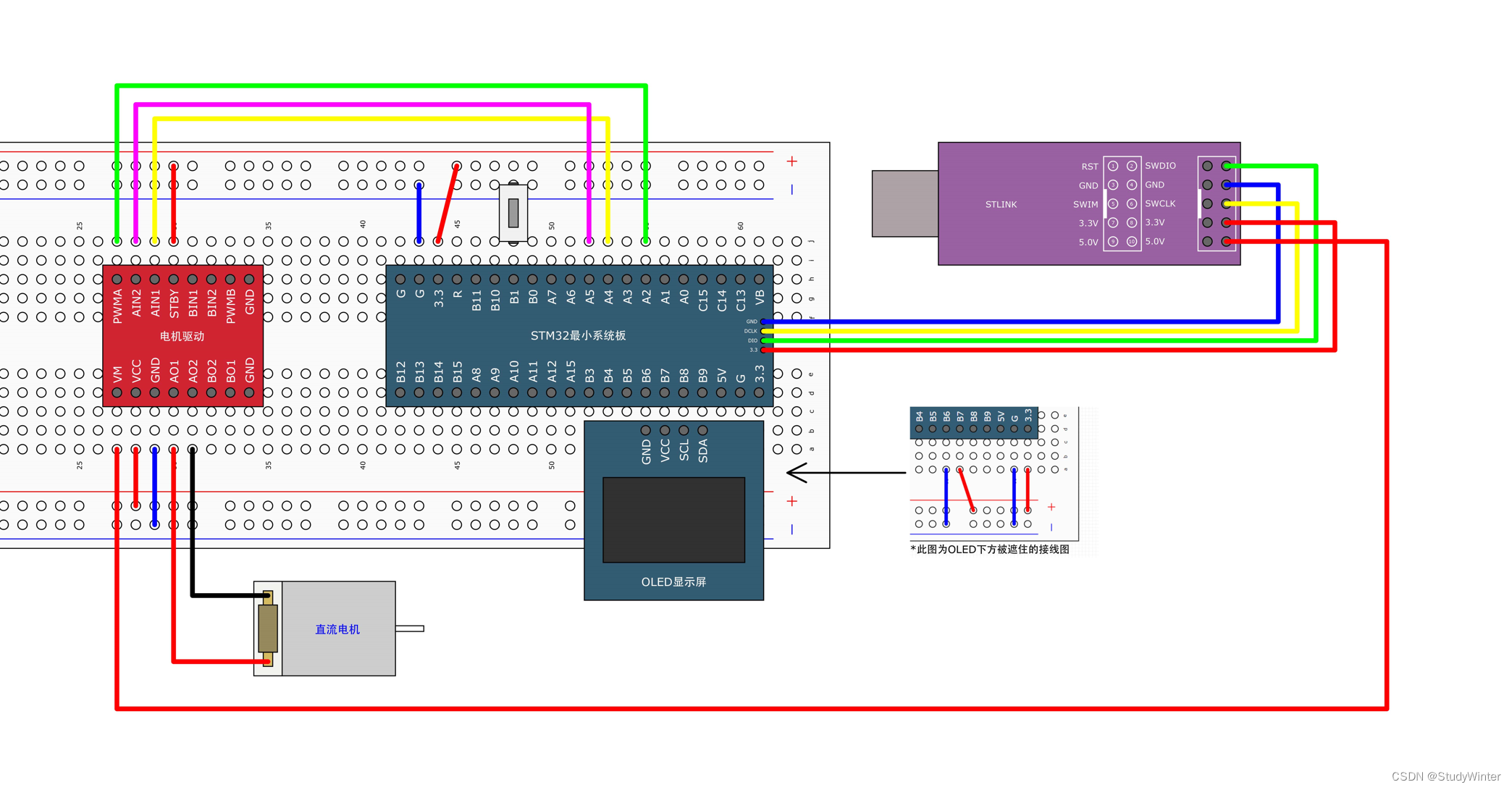
4?TIM輸出比較之PWM驅動直流電機
4.1?接線圖
4.2?模塊封裝
電機接到了通道3上
PWM.c
#include "stm32f10x.h" // Device header// PWM初始化函數
void PWM_Init(void)
{// 1RCC開啟時鐘RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_InternalClockConfig(TIM2);// 2配置時基單元(預分頻器、自動重裝器、計數模式等)TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 時鐘分頻,影響不大TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 計數模式,向上計數TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重復計數器的值// 關鍵參數TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; // ARR自動重裝器的值 兩個合起來計數0.1秒TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; // PSC預分頻器的值,36分頻TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);// 3配置輸出比較單元(CCR的值、輸出比較模式、極性選擇、輸出使能)TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure); // 先初始化,后面再按需修改TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 輸出比較模式,PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 輸出比較極性,高級性,極性不反轉,有效電平是高電平TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 輸出狀態輸出使能TIM_OCInitStructure.TIM_Pulse = 0; // CCR的值w為50,先設置為0,后面變化// 這個函數的選擇按照GPIO口需求來,PA2口對應的是第一個輸出比較通道TIM_OC3Init(TIM2, &TIM_OCInitStructure);// 頻率1kHz,占空比50% ,分辨率為1%。 CCR = 50 ,/**PWM分辨率: Reso = 1 / (ARR + 1) = 1% ==> ARR= 100 - 1PWM占空比: Duty = CCR / (ARR + 1) = 50% ==> CCR = 50PWM頻率: Freq = CK_PSC(72M) / (PSC + 1) / (ARR + 1) = 1K ==> PSC = 720 - 1*/// 4配置GPIO(初始化為復用推挽輸出,參考引腳定義表)RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 復用推挽輸出。定時器控制引腳,輸出控制權轉移給片上外設GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 5運行控制,啟動計數器TIM_Cmd(TIM2, ENABLE);
}// 更改通道1的CCR值
void PWM_SetCompare3(uint16_t Compare)
{TIM_SetCompare3(TIM2, Compare);
}
Motor.c
#include "stm32f10x.h" // Device header
#include "PWM.h"// 電機初始化
void Motor_Init(void)
{// 還有兩個角需要初始化(控制電機方向)RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);// 配置端口GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽輸出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 初始化PWMPWM_Init();
}// 設置速度函數
void Motor_Speed(int8_t speed)
{// 正轉if (speed >= 0){// 設置方向GPIO_SetBits(GPIOA, GPIO_Pin_4);GPIO_ResetBits(GPIOA, GPIO_Pin_5);// 速度,RCC的值,即調節占空比PWM_SetCompare3(speed);}else{// 設置方向GPIO_ResetBits(GPIOA, GPIO_Pin_4);GPIO_SetBits(GPIOA, GPIO_Pin_5);// 速度,RCC的值,即調節占空比PWM_SetCompare3(-speed);}}4.3?主函數
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Motor.h"
#include "Key.h"uint8_t keyNum;
int8_t speed;int main()
{OLED_Init(); // 初始化OLEDOLED_ShowString(1, 1, "Speed:");Motor_Init();KEY_Init();while (1){keyNum = KEY_GetNum();if (keyNum == 1){speed += 20;if (speed >= 100){speed = -100;}}Motor_Speed(speed);OLED_ShowSignedNum(1, 7, speed, 3);}
}



)















