livox 半固體激光雷達 gazebo 仿真 | 更換仿真中mid360雷達外形
- livox 半固體激光雷達 gazebo 仿真 | 更換仿真中mid360雷達外形
- livox 介紹
- 更換仿真中mid360雷達外形
livox 半固體激光雷達 gazebo 仿真 | 更換仿真中mid360雷達外形
livox 介紹
覽沃科技有限公司(Livox)成立于2016年。為了革新激光雷達行業,Livox致力于提供高性能、低成本的激光雷達傳感器。通過降低使用門檻和生產成本,Livox將激光雷達技術集成到更多產品和應用之中,從而為自動駕駛、智慧城市、測繪、移動機器人等行業帶來創新性改變。Livox產品已銷往包括美國、加拿大、中國、日本和歐盟在內的 26 個國家和地區。
面向智能移動機器人市場,Livox 推出最新一代 3D 激光雷達 Mid-360,開啟混合固態激光雷達 360° 立體感知新篇章。憑借小巧體積,Mid-360 的安裝布置更加靈活。同時,Mid-360 充分考慮了移動機器人對導航、避障等升維感知的需求,兼容室內外場景,賦能移動機器人進入空間智能感知新時代。 但是這款產品官網一直購買不到, 本篇博客 在 gazebo 中 可實現對該激光雷達的仿真 。
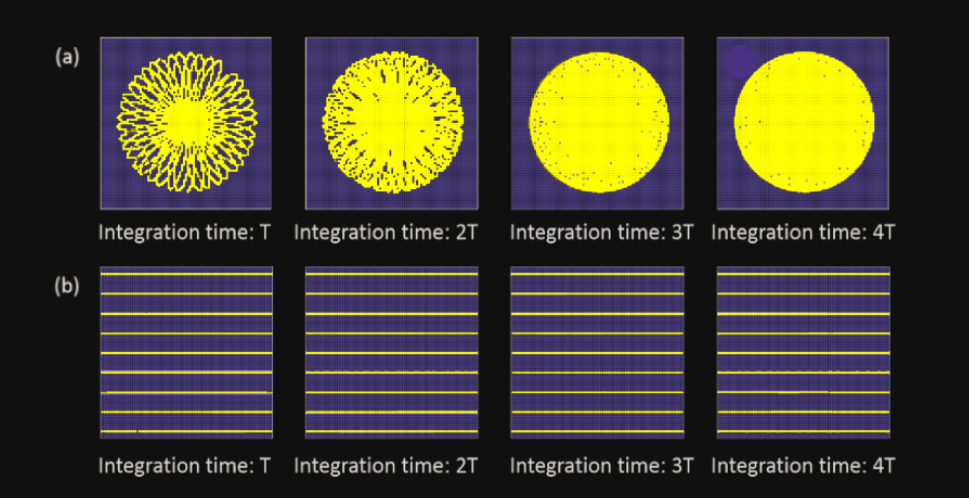
傳統激光雷達普遍采用機械掃描方式,掃描路徑隨時間重復。而Livox 激光雷達采用了獨特的掃描?式,掃描路徑不會重復。在非重復掃描方式中,視場中被激光照射到的區域面積會隨時間增大,這意味著視場覆蓋率隨時間推移而顯著提高,可減小視場內物體被漏檢的概率,有助于探測視場中的更多細節。
下圖中給出了一個直觀的例子。(a)圖由于采用了非重復掃描方式,隨著時間的積累,視場覆蓋率逐漸升高。而(b)圖,由于掃描每次都是重復的,視場覆蓋率幾乎沒有提升。
在gazebo的默認的lidar插件,屬于傳統激光雷達機械掃描方式,如法實現livox的非重復式掃描。
前面博客實現了livox雷達在gazebo的仿真,并更換了測試場景,和雷達型號,但型號換成mid360后,仿真中雷達的外形依然是mid70,雖然形成的數據是mid360的雷達數據,對算法調試仿真沒有影響,對于強迫癥的人還是想把外觀換成真正的。
本篇博客在gazebo 中,對livox mid360的外觀進行了更換。
更換仿真中mid360雷達外形
首先從官網下載mid-360的stp文件

這個網站也可以直接轉成dae文件 https://imagetostl.com/cn/convert/file/stp/to/dae

將轉換后的dae文件,拷入 livox_laser_simulation/meshes文件夾下。
編輯 urdf/livox_mid360.xacro 這個文件中的 visual標標簽 加載 mid-360的dae文件
<visual> <origin xyz="0.00 0 0.0" rpy="0 0 0"/><geometry><mesh filename="package://livox_laser_simulation/meshes/mid-360-asm.dae"></mesh></geometry></visual>
在運行 啟動文件
roslaunch livox_laser_simulation livox_simulation.launch
gazebo中界面如下
雖然可以加載,但是尺寸和角度和仿真環境不匹配。
需要用到 Blender 軟件
通過Blender軟件將官網的stp文件進行縮放,再導出為dae文件
Blender的 官網是 https://www.blender.org/
有linux版本的
點擊即可下載壓縮包
解壓后運行
blender 執行文件就行

怎會出現初始頁面
將中間的立方體刪掉。導入我們要編輯的mid360文件
blender還不支持直接導入stp文件,可以用其它的文件轉下格式,網上有很多方法。也直接將stp文件轉成了dae文件,下面直接用blender加載這個文件
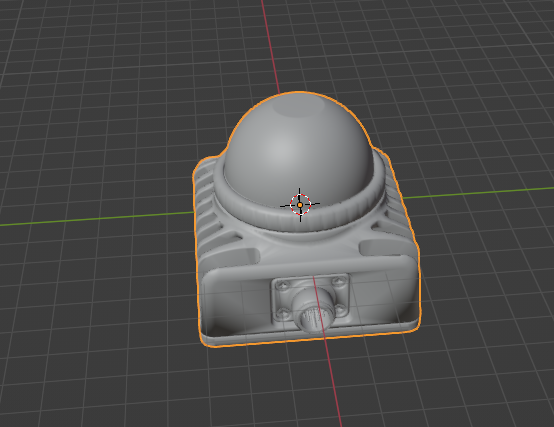
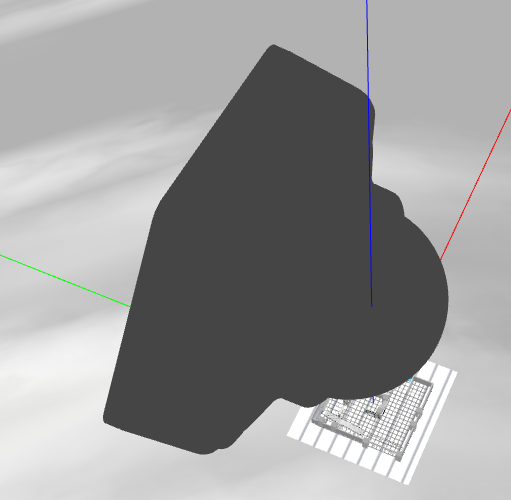
畫面中出現了這個模型
然后進行比例縮放
點擊右測工具欄的物體屬性標簽

縮放XYZ均改成0.001
這是模型就非常小了
導出dae格式文件

重復上面修改xacro文件的操作,使其顯示我們修改該的dae模型
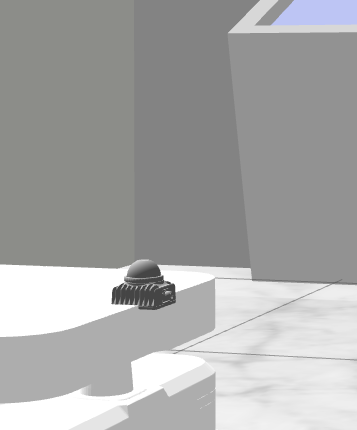
啟動仿真環境
roslaunch livox_laser_simulation livox_simulation.launch
然后就出來了

并開啟Launchpad活動)
















![[HCIE] IPSec-VPN (IKE自動模式)](http://pic.xiahunao.cn/[HCIE] IPSec-VPN (IKE自動模式))
