一、PID校正概述
PID校正是比例(Proportional)積分(Integral)微分(Derivative)校正的簡稱,是歷史最悠久,生命力最強的控制方式。
其主要優點有:
①原理簡單、使用方便
②適應性強,可廣泛應用于各種工業過程控制領域
③魯棒性強,控制品質對被控對象特性的變化不敏感。
PID校正的傳遞函數:

Kp是比例系數,能迅速的反應誤差,從而減小誤差,但不能消除穩態誤差;
Ki是積分增益系數,用于消除穩態誤差;
Kd是積分增益系數,用于增強系統的穩定性,減少調節時間。
PID控制是應用最廣泛的控制器方案,常用的形式有P、PI、PID。
二、控制對象及需求
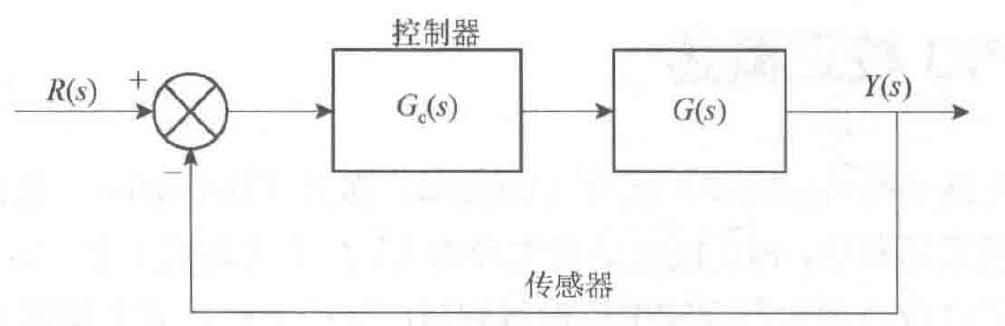
摩托車距離控制系統
其中,R(s)為需求距離,Y(s)為實際距離,通過傳感器反饋距離信息,摩托車內部發動機等的固有傳遞函數為
控制目標:
- 較快的上升時間和調節時間;
- 較小的調節兩;
- 穩態誤差為零。
三、利用Matlab Simulink對固有開環系統進行單位階躍仿真
1、啟動Simulink
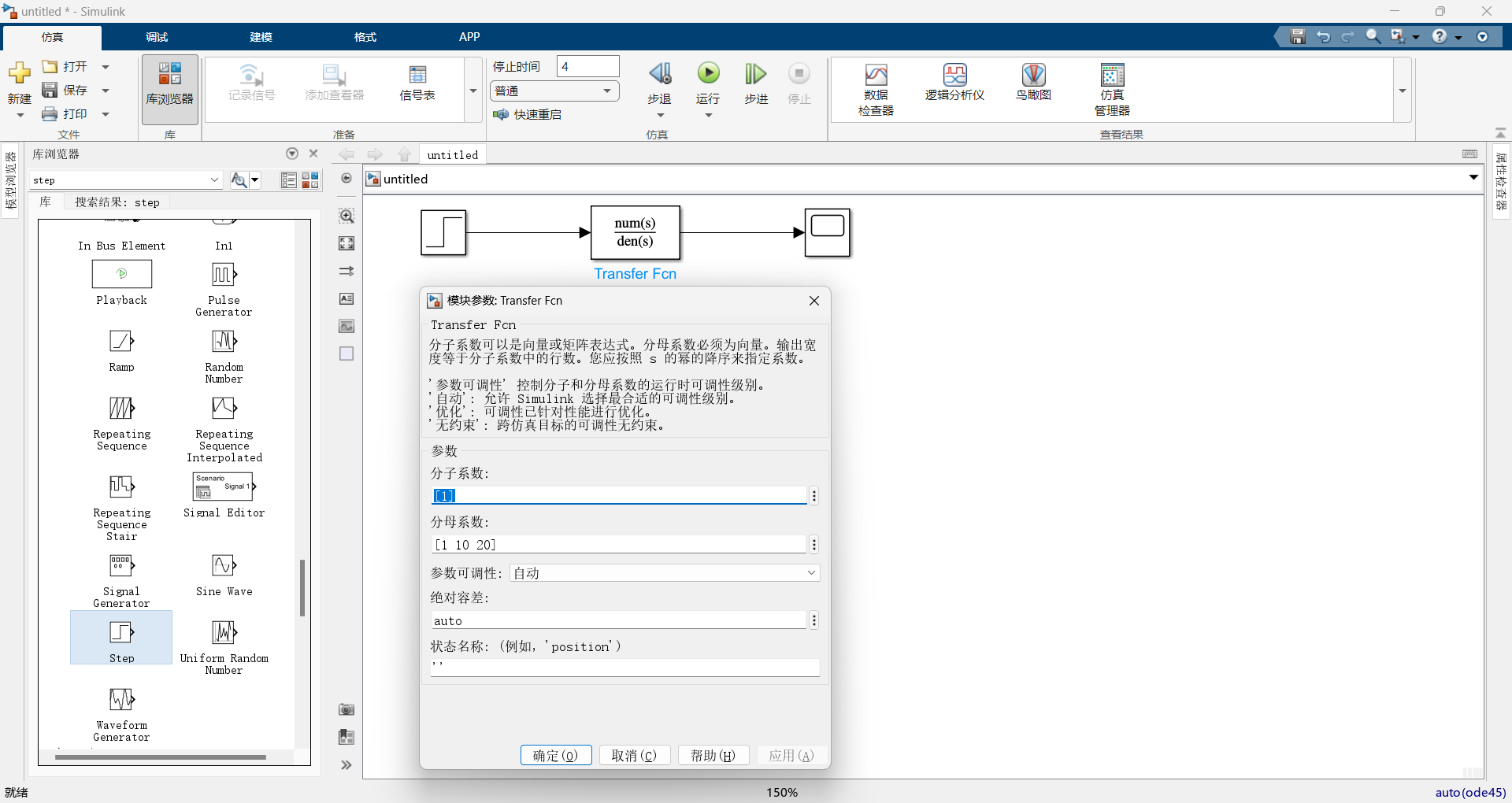
2、搭建模型
進入庫瀏覽器,找到相應的模塊并拖進去,輸入采用單位階躍,輸出采用示波器,修改傳遞函數如下。
3、查看結果
點擊運行,然后點擊SCOPE,可以查看系統的輸出響應。
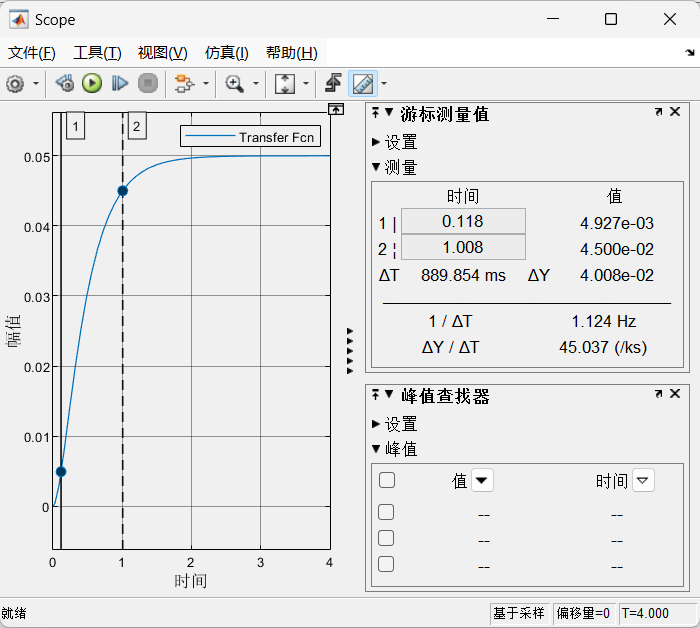
通過曲線可得系統的上升時間(10%-90%)為0.884s,調節時間1.5s。系統在幅值為1的階躍響應輸入下,穩態誤差值為0.05,為系統傳遞函數分母常數項20的倒數。為大幅降低系統的穩態誤差,首先考慮采用P校正。
)
















 MyBatis-plus)

