485(一般稱作 RS485/EIA-485)隸屬于 OSI 模型物理層,是串行通訊的一種。電氣特性規定 為 2 線,半雙工,多點通信的類型。它的電氣特性和 RS-232 大不一樣。用纜線兩端的電壓差值 來表示傳遞信號。RS485 僅僅規定了接受端和發送端的電氣特性。它沒有規定或推薦任何數據 協議。?
RS485 的特點包括:
1, 接口電平低,不易損壞芯片。RS485 的電氣特性:邏輯“1”以兩線間的電壓差為+(2~6)V 表 示;邏輯“0”以兩線間的電壓差為-(2~6)V 表示。接口信號電平比 RS232 降低了,不易損 壞接口電路的芯片,且該電平與 TTL 電平兼容,可方便與 TTL 電路連接。
2, 傳輸速率高。10 米時,RS485 的數據最高傳輸速率可達 35Mbps,在 1200m 時,傳輸速度 可達 100Kbps。
3, 抗干擾能力強。RS485 接口是采用平衡驅動器和差分接收器的組合,抗共模干擾能力增強, 即抗噪聲干擾性好。
4, 傳輸距離遠,支持節點多。RS485 總線最長可以傳輸 1200m 左右,更遠的距離則需要中繼 傳輸設備支持但這時(速率≤100Kbps)才能穩定傳輸,一般最大支持 32 個節點,如果使 用特制的 485 芯片,可以達到 128 個或者 256 個節點,最大的可以支持到 400 個節點。
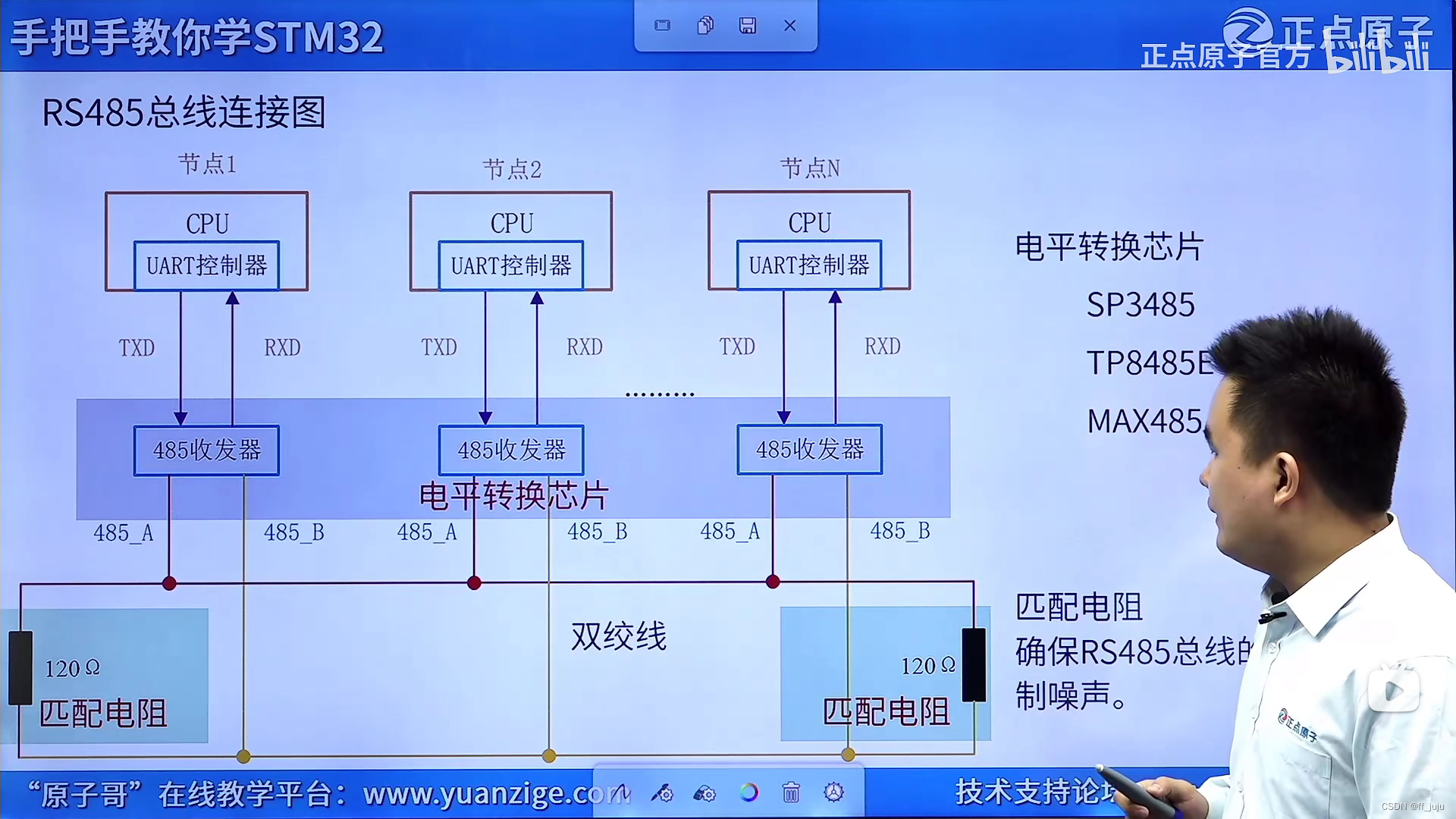
RS485 推薦使用在點對點網絡中,比如:線型,總線型網絡等,而不能是星型,環型網絡。 理想情況下 RS485 需要 2 個終端匹配電阻,其阻值要求等于傳輸電纜的特性阻抗(一般為 120 Ω)。沒有特性阻抗的話,當所有的設備都靜止或者沒有能量的時候就會產生噪聲,而且線移需 要雙端的電壓差。沒有終接電阻的話,會使得較快速的發送端產生多個數據信號的邊緣,導致 數據傳輸出錯。485 推薦的一主多從連接方式如圖 36.1.1 所示:
在上面的連接中,如果需要添加匹配電阻,我們一般在總線的起止端加入,也就是主機和 設備 4 上面各加一個 120Ω的匹配電阻。
由于 RS485 具有傳輸距離遠、傳輸速度快、支持節點多和抗干擾能力更強等特點,所以 RS485有很廣泛的應用。實際多設備時收發器有范圍為-7V到+12V的共模電壓,為了穩定傳輸, 也有使用 3 線的布線方式,即在原有的 A、B 兩線上多增加一條地線。(4 線制使用全雙工通訊 方式,這種也叫 RS422,由于布線的難度和通訊局限,相對使用得比較少)
TP8485E/SP3485 可作為 RS485 的收發器,該芯片支持 3.3V~5.5V 供電,最大傳輸速度可 達 250Kbps,支持多達 256 個節點(單位負載為 1/8 的條件下),并且支持輸出短路保護。該芯片的框圖如圖 36.1.2 所示: ?圖中 A、B 總線接口,用于連接 485 總線。RO 是接收輸出端,DI 是發送數據收入端,RE 是接收使能信號(低電平有效),DE 是發送使能信號(高電平有效)。
?圖中 A、B 總線接口,用于連接 485 總線。RO 是接收輸出端,DI 是發送數據收入端,RE 是接收使能信號(低電平有效),DE 是發送使能信號(高電平有效)。





 代碼
代碼
rs485.h
#ifndef __RS485_H
#define __RS485_H#include "./SYSTEM/sys/sys.h"/******************************************************************************************/
/* RS485 引腳 和 串口 定義 */
#define RS485_RE_GPIO_PORT GPIOD
#define RS485_RE_GPIO_PIN GPIO_PIN_7
#define RS485_RE_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOD_CLK_ENABLE(); }while(0) /* PD口時鐘使能 */#define RS485_TX_GPIO_PORT GPIOA
#define RS485_TX_GPIO_PIN GPIO_PIN_2
#define RS485_TX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口時鐘使能 */#define RS485_RX_GPIO_PORT GPIOA
#define RS485_RX_GPIO_PIN GPIO_PIN_3
#define RS485_RX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口時鐘使能 */#define RS485_UX USART2
#define RS485_UX_IRQn USART2_IRQn
#define RS485_UX_IRQHandler USART2_IRQHandler
#define RS485_UX_CLK_ENABLE() do{ __HAL_RCC_USART2_CLK_ENABLE(); }while(0) /* USART2 時鐘使能 *//******************************************************************************************//* 控制RS485_RE腳, 控制RS485發送/接收狀態* RS485_RE = 0, 進入接收模式* RS485_RE = 1, 進入發送模式*/
#define RS485_RE(x) do{ x ? \HAL_GPIO_WritePin(RS485_RE_GPIO_PORT, RS485_RE_GPIO_PIN, GPIO_PIN_SET) : \HAL_GPIO_WritePin(RS485_RE_GPIO_PORT, RS485_RE_GPIO_PIN, GPIO_PIN_RESET); \}while(0)#define RS485_REC_LEN 64 /* 定義最大接收字節數 64 */
#define RS485_EN_RX 1 /* 使能(1)/禁止(0)RS485接收 */extern uint8_t g_RS485_rx_buf[RS485_REC_LEN]; /* 接收緩沖,最大RS485_REC_LEN個字節 */
extern uint8_t g_RS485_rx_cnt; /* 接收數據長度 */void rs485_init( uint32_t baudrate); /* RS485初始化 */
void rs485_send_data(uint8_t *buf, uint8_t len); /* RS485發送數據 */
void rs485_receive_data(uint8_t *buf, uint8_t *len);/* RS485接收數據 */#endif
rs485.c?
#include "./BSP/RS485/rs485.h"
#include "./SYSTEM/delay/delay.h"UART_HandleTypeDef g_rs458_handler; /* RS485控制句柄(串口) */#ifdef RS485_EN_RX /* 如果使能了接收 */uint8_t g_RS485_rx_buf[RS485_REC_LEN]; /* 接收緩沖, 最大 RS485_REC_LEN 個字節. */
uint8_t g_RS485_rx_cnt = 0; /* 接收到的數據長度 */void RS485_UX_IRQHandler(void)
{uint8_t res;if ((__HAL_UART_GET_FLAG(&g_rs458_handler, UART_FLAG_RXNE) != RESET)) /* 接收到數據 */{HAL_UART_Receive(&g_rs458_handler, &res, 1, 1000);if (g_RS485_rx_cnt < RS485_REC_LEN) /* 緩沖區未滿 */{g_RS485_rx_buf[g_RS485_rx_cnt] = res; /* 記錄接收到的值 */g_RS485_rx_cnt++; /* 接收數據增加1 */}}
}#endif/*** @brief RS485初始化函數* @note 該函數主要是初始化串口* @param baudrate: 波特率, 根據自己需要設置波特率值* @retval 無*/
void rs485_init(uint32_t baudrate)
{/* IO 及 時鐘配置 */RS485_RE_GPIO_CLK_ENABLE(); /* 使能 RS485_RE 腳時鐘 */RS485_TX_GPIO_CLK_ENABLE(); /* 使能 串口TX腳 時鐘 */RS485_RX_GPIO_CLK_ENABLE(); /* 使能 串口RX腳 時鐘 */RS485_UX_CLK_ENABLE(); /* 使能 串口 時鐘 */GPIO_InitTypeDef gpio_initure;gpio_initure.Pin = RS485_TX_GPIO_PIN;gpio_initure.Mode = GPIO_MODE_AF_PP;gpio_initure.Pull = GPIO_PULLUP;gpio_initure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(RS485_TX_GPIO_PORT, &gpio_initure); /* 串口TX 腳 模式設置 */gpio_initure.Pin = RS485_RX_GPIO_PIN;gpio_initure.Mode = GPIO_MODE_AF_INPUT;HAL_GPIO_Init(RS485_RX_GPIO_PORT, &gpio_initure); /* 串口RX 腳 必須設置成輸入模式 */gpio_initure.Pin = RS485_RE_GPIO_PIN;gpio_initure.Mode = GPIO_MODE_OUTPUT_PP;gpio_initure.Pull = GPIO_PULLUP;gpio_initure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(RS485_RE_GPIO_PORT, &gpio_initure); /* RS485_RE 腳 模式設置 *//* USART 初始化設置 */g_rs458_handler.Instance = RS485_UX; /* 選擇485對應的串口 */g_rs458_handler.Init.BaudRate = baudrate; /* 波特率 */g_rs458_handler.Init.WordLength = UART_WORDLENGTH_8B; /* 字長為8位數據格式 */g_rs458_handler.Init.StopBits = UART_STOPBITS_1; /* 一個停止位 */g_rs458_handler.Init.Parity = UART_PARITY_NONE; /* 無奇偶校驗位 */g_rs458_handler.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 無硬件流控 */g_rs458_handler.Init.Mode = UART_MODE_TX_RX; /* 收發模式 */HAL_UART_Init(&g_rs458_handler); /* HAL_UART_Init()會使能UART2 */#if RS485_EN_RX /* 如果使能了接收 *//* 使能接收中斷 */__HAL_UART_ENABLE_IT(&g_rs458_handler, UART_IT_RXNE); /* 開啟接收中斷 */HAL_NVIC_EnableIRQ(RS485_UX_IRQn); /* 使能USART2中斷 */HAL_NVIC_SetPriority(RS485_UX_IRQn, 3, 3); /* 搶占優先級3,子優先級3 */
#endifRS485_RE(0); /* 默認為接收模式 */
}/*** @brief RS485發送len個字節* @param buf : 發送區首地址* @param len : 發送的字節數(為了和本代碼的接收匹配,這里建議不要超過 RS485_REC_LEN 個字節)* @retval 無*/
void rs485_send_data(uint8_t *buf, uint8_t len)
{RS485_RE(1); /* 進入發送模式 */HAL_UART_Transmit(&g_rs458_handler, buf, len, 1000); /* 串口2發送數據 */g_RS485_rx_cnt = 0;RS485_RE(0); /* 進入接收模式 */
}/*** @brief RS485查詢接收到的數據* @param buf : 接收緩沖區首地址* @param len : 接收到的數據長度* @arg 0 , 表示沒有接收到任何數據* @arg 其他, 表示接收到的數據長度* @retval 無*/
void rs485_receive_data(uint8_t *buf, uint8_t *len)
{uint8_t rxlen = g_RS485_rx_cnt;uint8_t i = 0;*len = 0; /* 默認為0 */delay_ms(10); /* 等待10ms,連續超過10ms沒有接收到一個數據,則認為接收結束 */if (rxlen == g_RS485_rx_cnt && rxlen) /* 接收到了數據,且接收完成了 */{for (i = 0; i < rxlen; i++){buf[i] = g_RS485_rx_buf[i];}*len = g_RS485_rx_cnt; /* 記錄本次數據長度 */g_RS485_rx_cnt = 0; /* 清零 */}
}
main.c?
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
#include "./BSP/RS485/rs485.h"int main(void)
{uint8_t key;uint8_t i = 0, t = 0;uint8_t cnt = 0;uint8_t rs485buf[5];HAL_Init(); /* 初始化HAL庫 */sys_stm32_clock_init(RCC_PLL_MUL9); /* 設置時鐘, 72Mhz */delay_init(72); /* 延時初始化 */usart_init(115200); /* 串口初始化為115200 */led_init(); /* 初始化LED */lcd_init(); /* 初始化LCD */key_init(); /* 初始化按鍵 */rs485_init(9600); /* 初始化RS485 */lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);lcd_show_string(30, 70, 200, 16, 16, "RS485 TEST", RED);lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);lcd_show_string(30, 110, 200, 16, 16, "KEY0:Send", RED); /* 顯示提示信息 */lcd_show_string(30, 130, 200, 16, 16, "Count:", RED); /* 顯示當前計數值 */lcd_show_string(30, 150, 200, 16, 16, "Send Data:", RED); /* 提示發送的數據 */lcd_show_string(30, 190, 200, 16, 16, "Receive Data:", RED);/* 提示接收到的數據 */while (1){key = key_scan(0);if (key == KEY0_PRES) /* KEY0按下,發送一次數據 */{for (i = 0; i < 5; i++){rs485buf[i] = cnt + i; /* 填充發送緩沖區 */lcd_show_xnum(30 + i * 32, 170, rs485buf[i], 3, 16, 0X80, BLUE); /* 顯示數據 */}rs485_send_data(rs485buf, 5); /* 發送5個字節 */}rs485_receive_data(rs485buf, &key);if (key) /* 接收到有數據 */{if (key > 5)key = 5; /* 最大是5個數據. */for (i = 0; i < key; i++){lcd_show_xnum(30 + i * 32, 210, rs485buf[i], 3, 16, 0X80, BLUE); /* 顯示數據 */}}t++;delay_ms(10);if (t == 20){LED0_TOGGLE(); /* LED0閃爍, 提示系統正在運行 */t = 0;cnt++;lcd_show_xnum(30 + 48, 130, cnt, 3, 16, 0X80, BLUE); /* 顯示數據 */}}
}
)






![[Ubuntu]RT810xE--網線已拔出--問題解決](http://pic.xiahunao.cn/[Ubuntu]RT810xE--網線已拔出--問題解決)

![轉移表達式:<![CDATA[ ]]>](http://pic.xiahunao.cn/轉移表達式:<![CDATA[ ]]>)






![[遞歸]有理數樹](http://pic.xiahunao.cn/[遞歸]有理數樹)


