?https://github.com/malintha/rosns3
第一步:clone和構建rosns3客戶端
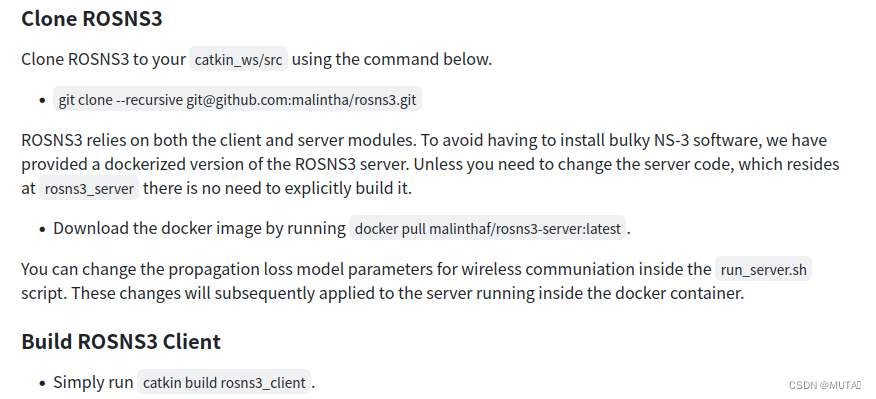
第二步:運行
最詳細的ubuntu 安裝 docker教程 - 知乎
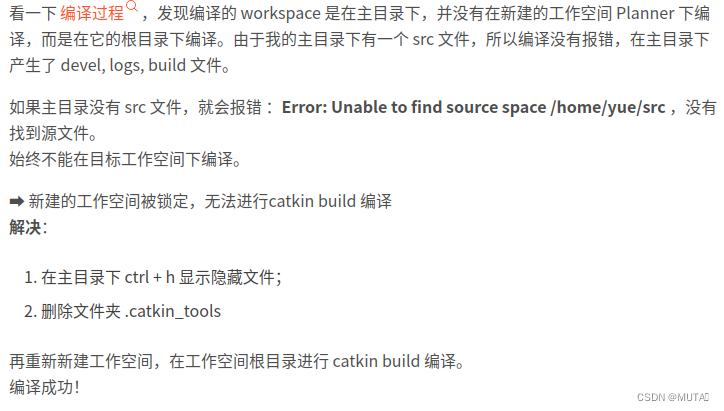
1. unable to find source space '/home/muta/src'
![]()
解決方法:
將副將將碰到的bug,解決方法_#include <multi_map_server/multioccupancygrid.h>_聰明小張的博客-CSDN博客
?
- ?在主要目錄下ctrl+h 顯示隱藏文件,刪除文件夾 catkin_tools
- 新建工作空間
Ubuntu18.04創建工作空間和功能包_ubuntu創建工作空間-CSDN博客
2. 初始化工作空間
![]()
未進行初始化和初始化之后,初始化之后目錄中多了CMakeLists.txt
有這樣一個文件也就說明我們當前的路徑是一個ROS的工作空間了
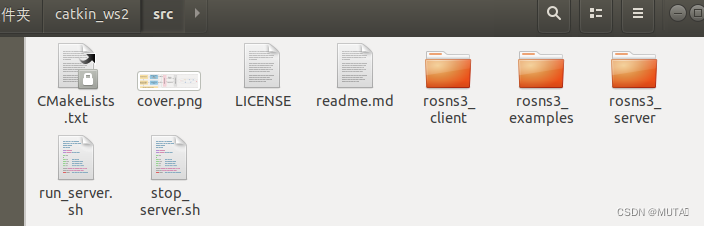
3.? 新建工作空間后,把rosns3文件夾里的東西復制到新建工作空間的src文件夾下(注意不是整個文件夾復制)
4.
catkin_make //這一步會產生build 和src文件夾
source devel/setup.bash //配置工作空間,用于刷新環境,必不可少,將當前的工作空間配置了
5.catkin build rosns3_client
The build space at '/home/muta/demo_02/build' was previously built by 'catkin_make'. Please remove the build space or pick a different build space.
解決方法:
The build space at ‘/home/abc/catkin_ws/build‘ was previously built by ‘catkin_make‘. Please remove-CSDN博客
(1)先刪除devel build 兩個文件夾

rm devel build -r???? -------------------->刪除devel build兩個文件夾并提示是否刪除

(2)catkin build

成功
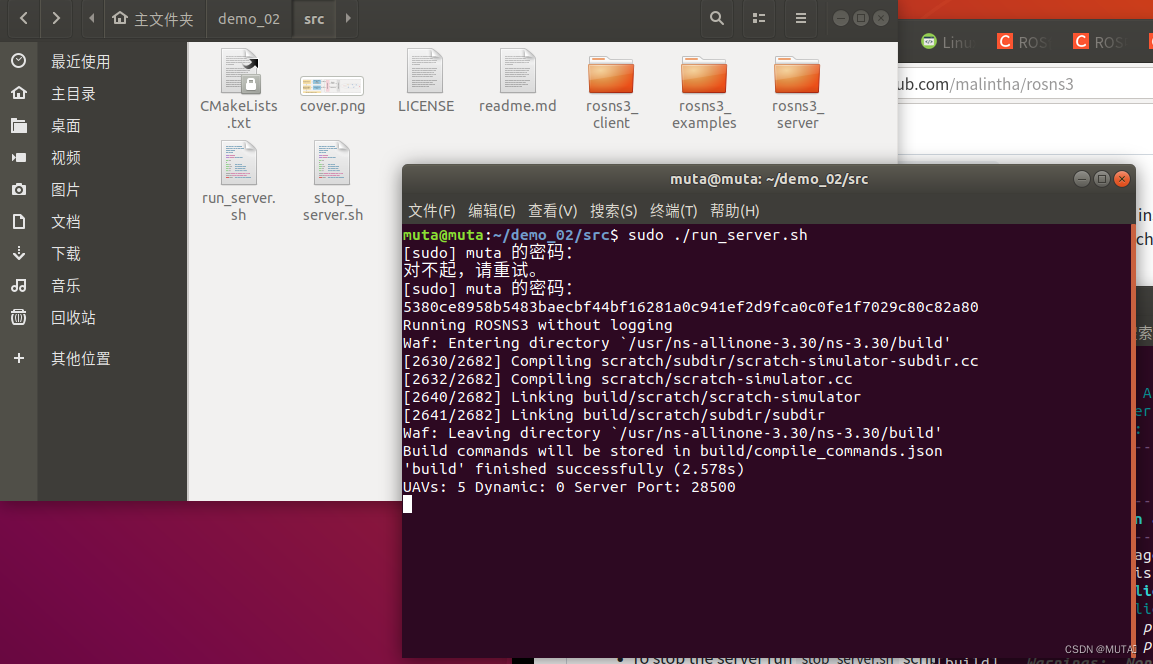
5.運行 ./run_server.sh
和遞減運算符(--))











)

)




)