一、多幀視頻圖像去噪 原理
????????當攝像機每秒捕捉的圖像達到60FPS,除了場景切換或者一些快速運動的場 景外,視頻信號中相鄰的兩幀圖像內容大部分是相同的。并且視頻信號中的噪 聲大部分都是均值為零的隨機噪聲,因此在時間上對視頻信號做幀平均,可以 有效的濾除噪聲,提高視頻質量。尤其是針對靜止圖像而言,參與幀平均的幀數越 多,時域去噪效果就越好。但是由于實際視頻信號中往往存在著運動目標,直接進 行時域幀平均會引起時域非平穩現象,即運動物體產生“拖尾”。為了解決這一 問題,可以采用運動自適應時域去噪和運動補償時域去噪方法。?
1.1 運動自適應時域濾波?
????????由于做時域幀平均需要多幀圖像,硬件實現時存儲空間成本較高,故大多時域 去噪算法[21-23]都采用遞歸的方式進行濾波,只需存儲一幀參考幀的數據。運動自適應時域去噪類似一個簡單的遞歸濾波器,其數學表現形式如式(3.12)所示:
![]()
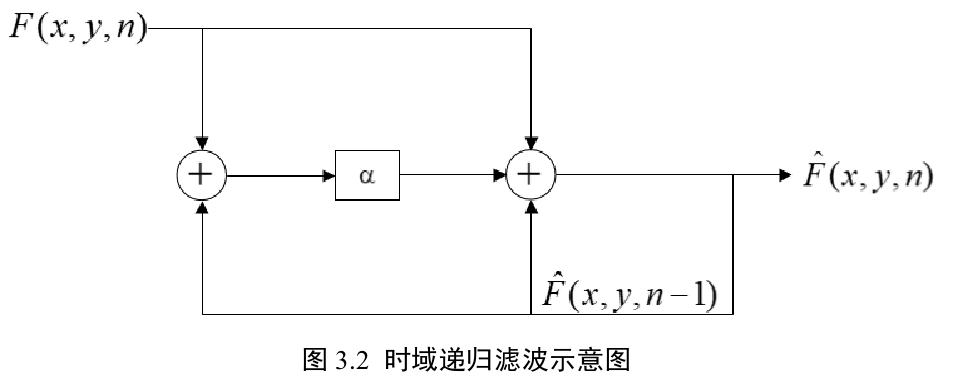
????????其中F(x,y,n)為當前幀含噪像素點(x,y)的輸入, 為前一幀的點(x,y)時域預測結果,
為時域濾波系數,
為當前幀像素點的時域預測結果。?
時域濾波示意圖如圖3.2所示,從圖中可見時域遞歸濾波在迭代更新時需要兩幀的圖像數據,在實時處理的硬件設計中只需前一幀數據的存儲,能夠較好的節省硬件資源。濾波系數 大小取決于當前像素點運動強度,即當運動強度增大時,濾波系數 值也會相應增大,濾波結果受到參考幀的影響越小,以避免產生“拖尾” 現象。當前點運動強度越小時,濾波系數 值越小,濾波結果會更多的參考前一幀的信息。不難看出運動自適應時域濾波系數的計算是整個時域濾波算法的核心。?
????????幀間差分法是一種經典的運動檢測方法,其主要思想是對視頻信號的相鄰兩幀直接進行比較來判斷是否存在運動區域。若前后兩幀之間對應位置的像素點之間差距較大,則會被判斷為運動區域。沿時間方向做幀差計算式如式(3.13)所示:
![]()
????????其中 和
分別表示視頻信號中第t+1幀和第t幀點(x,y)處的像素灰度值,
則表示第t+1幀和第t幀的差值。
1.2運動補償時域濾波?
????????運動自適應時域濾波對于運動程度較小或者是靜止圖像的去噪效果十分顯著, 但是處理運動程度較大的圖像區域時,為了有效抑制“拖尾”現象,去噪性能會相 應下降。基于運動補償的時域去噪方法首先參考兩幀圖像內容之間的關聯性 進行運動補償,使參考幀的圖像內容與當前幀更加接近,再經過加權平均處理后, 就能夠在改善去噪效果的同時減少“拖尾”現象的出現。采用帶運動補償的時域去噪方法,可以有效地使濾波過程沿著運動軌跡進行,其計算過程如式(3.14)所示:

其中(?x,?y)為當前幀與參考幀之間的像素點偏移。運動補償時域去噪方法示意圖如圖3.3所示:
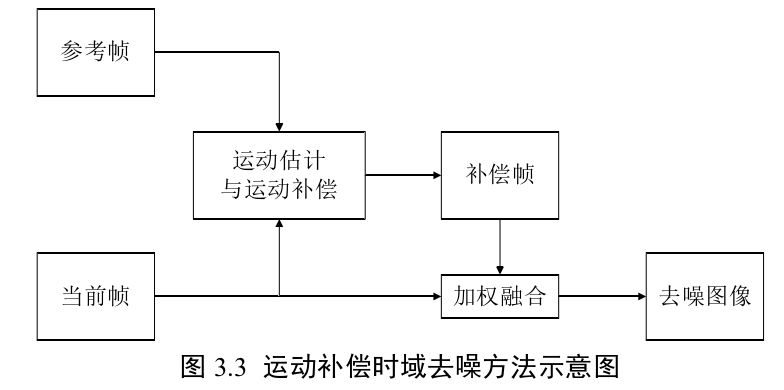
????????由于運動補償時域去噪方法的效果很大程度取決于運動補償算法的好壞,在一些時域非平穩區域,運動補償算法精確度變低會對去噪效果有較大的影響。因此 一般會通過一個閾值來自適應地控制運動補償時域去噪和運動自適應時域去噪之 間切換,如果當前點與參考點差值超過該閾值,則選擇啟用運動補償,如果差值低于該閾值,則切換到不啟用運動補償的時域去噪方法處理。?
帶運動補償的時域去噪方法在處理運動拖影的問題上表現較好,但其在遇到 場景切換或者高速運動的物體時,已經較難跟蹤到運動塊,反而會導致運動“拖尾” 現象。并且帶運動補償的時域去噪方法提高去噪性能的同時計算量也相應增大了, 難以滿足實時性要求較高的視頻處理系統,因此在實時視頻處理系統中,非運動補償的時域去噪方法能夠發揮更大優勢。

 ---->培養紅隊免殺思路)
)


)






 egui (0.32.1) 學習筆記(逐行注釋)(二十四)窗口顏色、透明度、居中顯示)


與關鍵技術深度解析研究報告,以及實現代碼)



