?
【導讀】
本文致力于解決一個非常實際的工業問題:如何利用無人機(UAV)全自動、高效、可靠地檢查風力渦輪機葉片。葉片是風力發電機組中最昂貴且易損的部件之一,定期檢查至關重要。然而,當前的技術在自動化過程中面臨幾個核心痛點,本文正是針對這些痛點提出了創新的解決方案。
目錄
關鍵貢獻概述如下:
一、實驗
基于費馬點的葉片停止角度估計
葉片細節優先曝光調整
二、結論與未來工作
在檢查過程中,利用伺服控制或軌跡規劃使無人機沿葉片飛行并采集圖像。這些圖像對后續階段的損傷檢測至關重要。在圖像采集過程中,陽光和相機角度的變化可能會在葉片和背景區域之間引入顯著的亮度差異。然而,主流現成相機中集成的自動曝光調整功能優先考慮整體圖像曝光,而不是聚焦于特定感興趣區域。這可能導致葉片區域過度曝光或曝光不足,可能掩蓋關鍵細節并使后續損傷檢測復雜化。
論文標題:
High-Precision Fish Pose Estimation Method Based on Improved HRNet
論文鏈接:
https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202502001?refererToken=58ec6ffbb457478083f1e41248064fcd
關鍵貢獻概述如下:
-
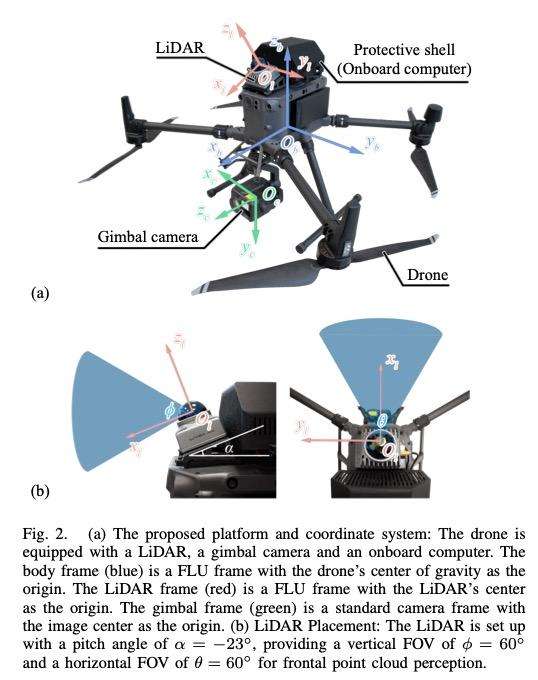
無人機檢查平臺:針對自動檢查任務和場景的需求,我們介紹了一種具有長續航能力、高抗風能力、大規模感知能力、高質量圖像采集能力和高計算能力的無人機檢查平臺。
-
-
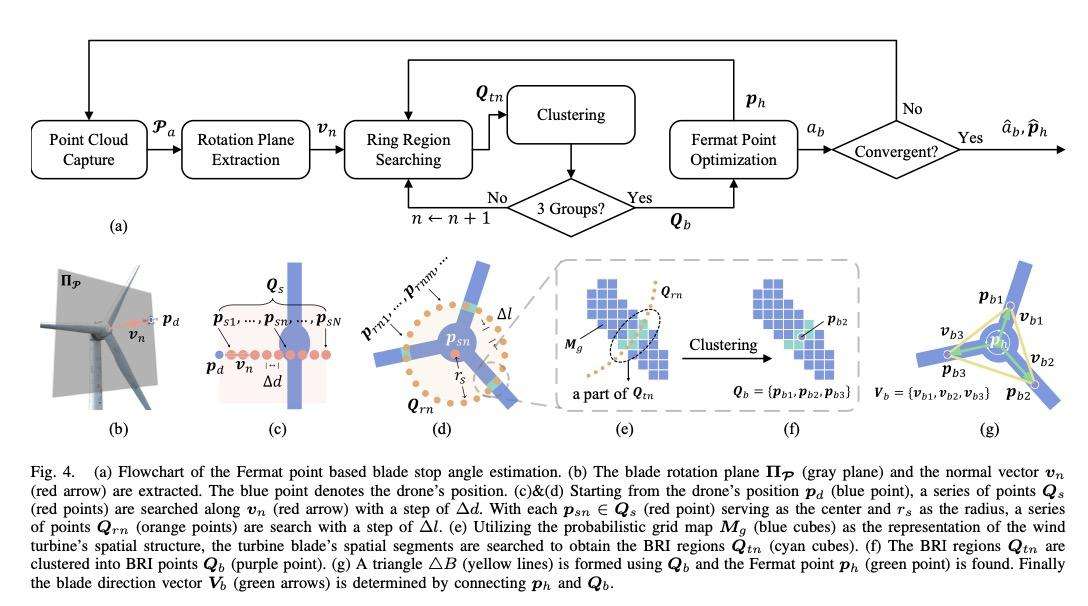
基于費馬點的葉片停止角度估計方法:受風力渦輪機獨特空間幾何屬性的啟發,我們提出了一種基于費馬點的葉片停止角度估計方法,該方法實現了更高的精度,且不受背景環境的影響。
-
-
實時葉片細節優先曝光調整方法:提出了一種曝光調整方法,在采集過程中優先考慮葉片細節并實時調整曝光,確保在不同陽光條件下保持適當的亮度和細節保留。
-
在運營風電場進行現場驗證:在5個風電場中對10種風力渦輪機模型進行的超過120次飛行的廣泛測試證明了所提出平臺和方法的穩健可靠性,確認了它們在實際檢查場景中的有效性。
一、實驗
-
基于費馬點的葉片停止角度估計
? ? ?在每次測試中,風力渦輪機的制動系統被激活以停止渦輪轉子,現場多變的風況自然產生了不同的葉片停止角度。我們將實驗結果與已建立的基于視覺的方法進行了比較。Stokkeland 等人提出了一種基于視覺的方法,采用霍夫線變換來檢測線條,并使用投票算法來識別葉片線。該方法在保留其關鍵投票算法的同時,被調整以適應我們的估計距離。實驗結果如圖 6 所示。圖 6(i) 和 (ii) 分別顯示了背景山脈和風力渦輪機塔架對基于視覺的方法的干擾,導致識別右側和下部葉片不準確,從而影響了估計結果。在圖 6(iii) 中,背景村莊復雜的視覺細節使得基于視覺的方法中的投票算法無法識別渦輪葉片,導致估計失敗。
相比之下,所提出的方法利用激光雷達的精確點云,基于葉片旋轉平面搜索渦輪葉片,不受背景視覺因素和渦輪塔架的影響。
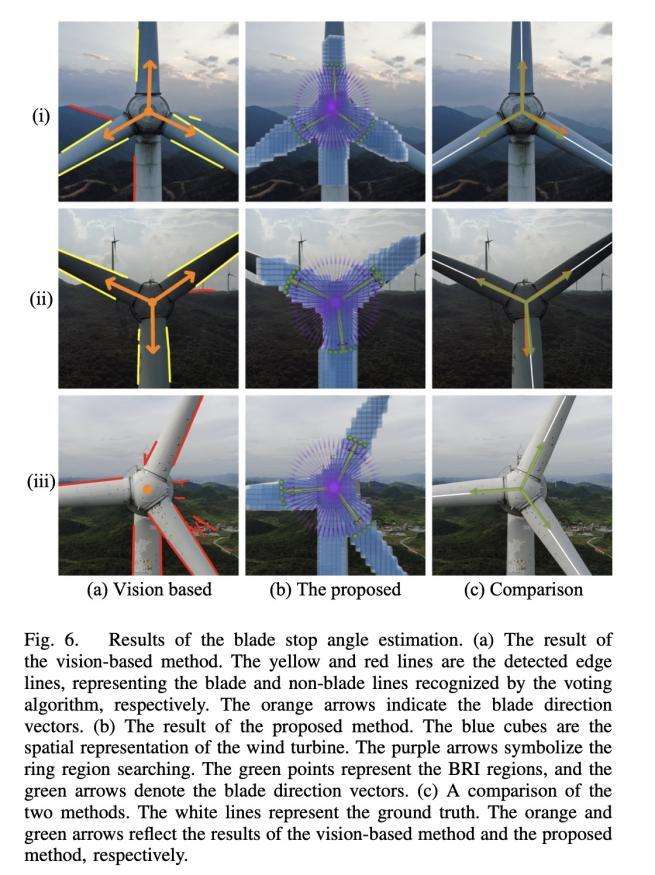
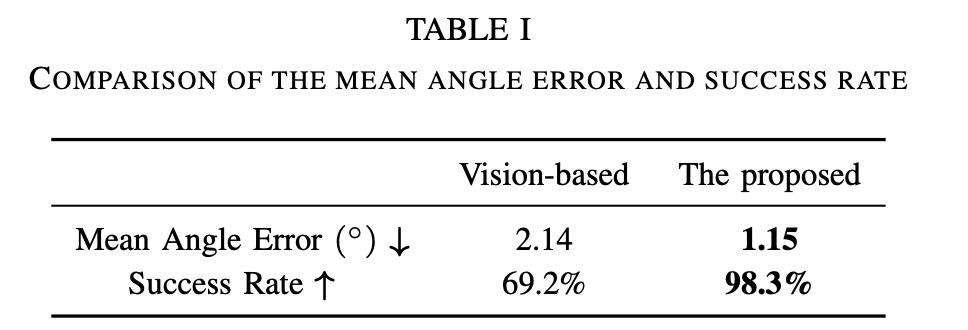
表 I 比較了兩種方法的平均角度誤差和成功率。所提出的方法優于基于視覺的方法,具有更低的平均角度誤差(1.15° 對比 2.14°)和顯著更高的成功率(98.3% 對比 69.2%)。這些發現強調了所提出方法卓越的魯棒性和準確性。在這 120 次試驗中,觀察到 2 次失敗實例。一次是由于大霧,影響了激光雷達對葉片結構的感知。另一次源于先驗輪轂位置估計 p0h 存在較大誤差,使得環形區域搜索無法提取 BRI 區域。未來的工作將側重于提高先驗輪轂位置估計的準確性。
-
葉片細節優先曝光調整
實驗在晴天、多云和陰天進行,以引入不同的陽光條件,從而在曝光不足和曝光過度的場景下測試該方法。控制所提出的平臺檢查渦輪葉片,從葉片根部到葉尖以預定義的時間間隔捕獲圖像。具體來說,μ 反映亮度,σ 和 H 表示細節的復雜程度。通常,曝光不足普遍存在于葉片下表面,而曝光過度則常見于上表面。對這兩種場景的評估詳見圖 7。
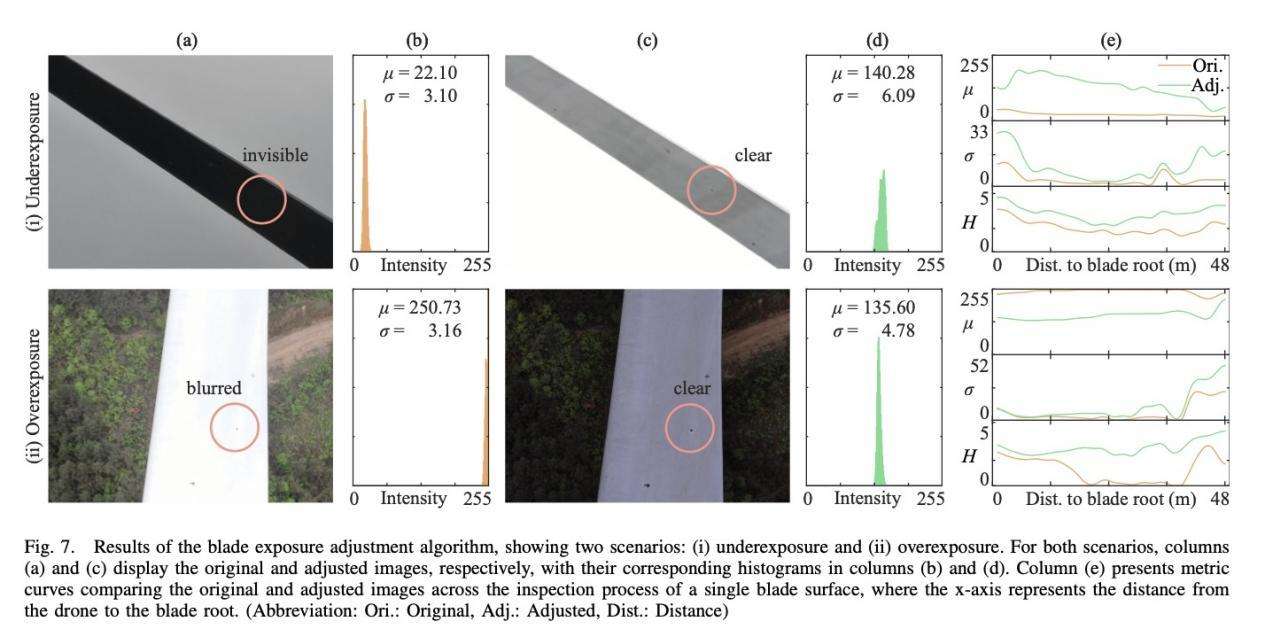
通過比較原始圖像和調整后的圖像,我們分析了它們在葉片區域內的直方圖。直方圖的位置和寬度分別反映了亮度和細節豐富度。如圖 7(i)-(a) 所示,曝光不足表現為昏暗和細節不可見(圖 7(i)-(a) 中的紅色圓圈)。調整后的圖像圖 7(i)-(c) 提高了亮度,顯示出更清晰的細節。在圖 7(i)-(b) 和 (i)-(d) 中,相應的直方圖顯示灰度值從22.10的低值過渡到140.28,灰度范圍擴大了97.0%。相反,圖 7(ii)-(a) 描繪的曝光過度導致亮度過高和細節模糊(圖 7(ii)-(a) 中的紅色圓圈)。調整后的圖像圖 7(ii)-(c) 糾正了這一點,增強了細節的復雜性。在圖 7(ii)-(b) 和 (ii)-(d) 中,它們相應的直方圖從250.73的高灰度值轉變為 135.60,灰度范圍擴大了51.3%。
我們計算了原始圖像和調整后圖像的這些指標,并繪制了無人機從葉片根部檢查到葉尖過程中的曲線。圖 7(i)-(e) 和 (ii)-(e) 分別說明了曝光不足和曝光過度的場景。原始的μ曲線處于極端值,而調整后的曲線穩定在一個最佳范圍內,表明亮度得到了適當的調整。調整后的 σ 和 H 曲線超過了原始曲線,意味著更豐富的葉片細節。表 II 展示了指標平均值。
-
在曝光不足場景中,亮度從 25.48 增加到 133.27,以 σ 和 H 量化的細節豐富度分別提高了218.85% 和56.19%。
-
在曝光過度場景中,亮度從245.64調整到150.85,細節豐富度分別提高了 187.73% 和 40.65%。
這些結果證實了所提出方法在兩種場景下的有效性,能夠保持適當的亮度并保留復雜的葉片細節。
獲取的高質量圖像數據可無縫接入Coovally平臺進行自動化處理。平臺提供從數據管理、標注到模型訓練的全流程支持,內置YOLO系列、Transformer等多種主流模型,支持分布式訓練加速和自動化超參調優,顯著提升損傷檢測模型的開發效率。
!!點擊下方鏈接,立即體驗Coovally!!
平臺鏈接:https://www.coovally.com
在陽光快速變化期間偶爾會出現次優性能。曝光調整的輕微延遲導致在少數連續幀中出現暫時的過度曝光或曝光不足,表明在快速變化光照下的響應速度還有提升空間。
二、結論與未來工作
本文針對基于無人機的風力渦輪機葉片自動檢查,提出了一種無人機檢查平臺、一種基于費馬點的葉片停止角度估計方法和一種葉片細節優先的曝光調整方法。
在 5 個運營風電場中對 10 種風力渦輪機模型進行的廣泛 120 次飛行證明了其卓越的性能,為解決自動檢查的核心挑戰做出了切實貢獻。
-
平臺的穩定性確保了在復雜風電場環境中一致的數據收集,解決了操作可靠性挑戰。
-
葉片停止角度估計方法具有 1.15° 的平均誤差和 98.3% 的成功率,提高了葉片位置準確性,有助于更精確的檢查軌跡規劃,并減少了沿葉片表面的飛行跟蹤誤差。這對于確保葉片檢查的全面覆蓋至關重要。
-
此外,曝光調整方法保持了最佳的葉片亮度并增強了細節清晰度,在曝光不足和曝光過度場景下分別提高了 56.19% 和 40.65%。這使得細微缺陷可區分,直接提高了下游損傷檢測的可靠性。
在未來的工作中,基于本文提出的平臺和方法,我們將旨在進行更全面的風力渦輪機參數估計以及檢查飛行的規劃與控制,最終實現一個完全自動化的、基于無人機的風力渦輪機葉片檢查系統。通過集成Coovally這樣的高效AI開發平臺,將能夠進一步簡化數據處理、模型訓練與部署流程,大幅降低技術門檻,加速智能巡檢解決方案的實際落地與應用。
為了幫助用戶更高效地掌握模型訓練全過程,Coovally平臺還可以直接查看“實驗日志”。在每一個實驗詳情頁中,用戶都可以實時查看訓練日志、輸出信息或報錯內容,無需額外配置、無縫集成于工作流中!
不論是模型調參、錯誤排查,還是過程復現,這項新功能都將大幅提升你的實驗效率。

與關鍵技術深度解析研究報告,以及實現代碼)







NO.2——Unity6下載與安裝(超詳細))

)







