目錄
1.課題概述
2.系統仿真結果
3.核心程序
4.系統原理簡介
5.完整工程文件
1.課題概述
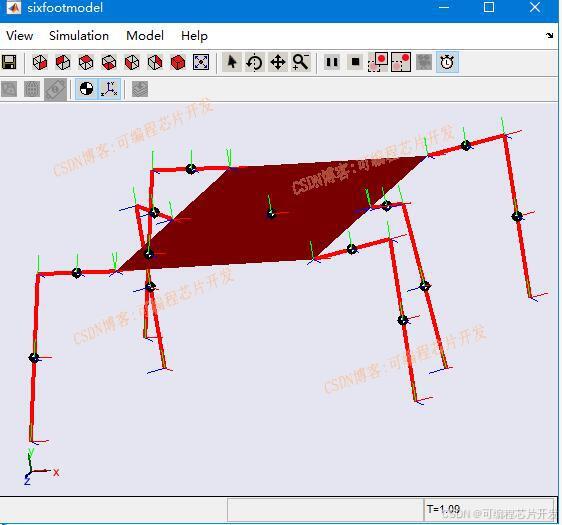
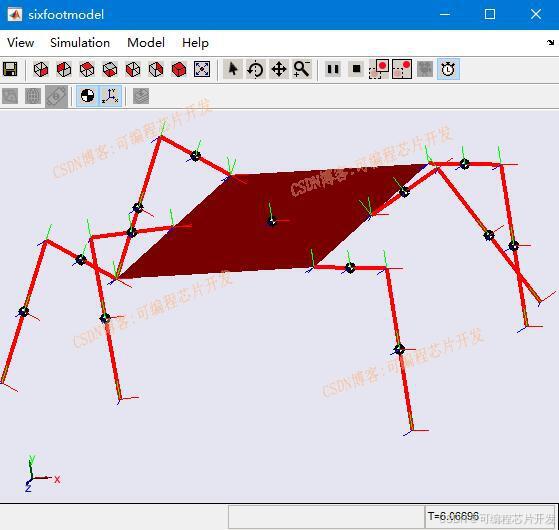
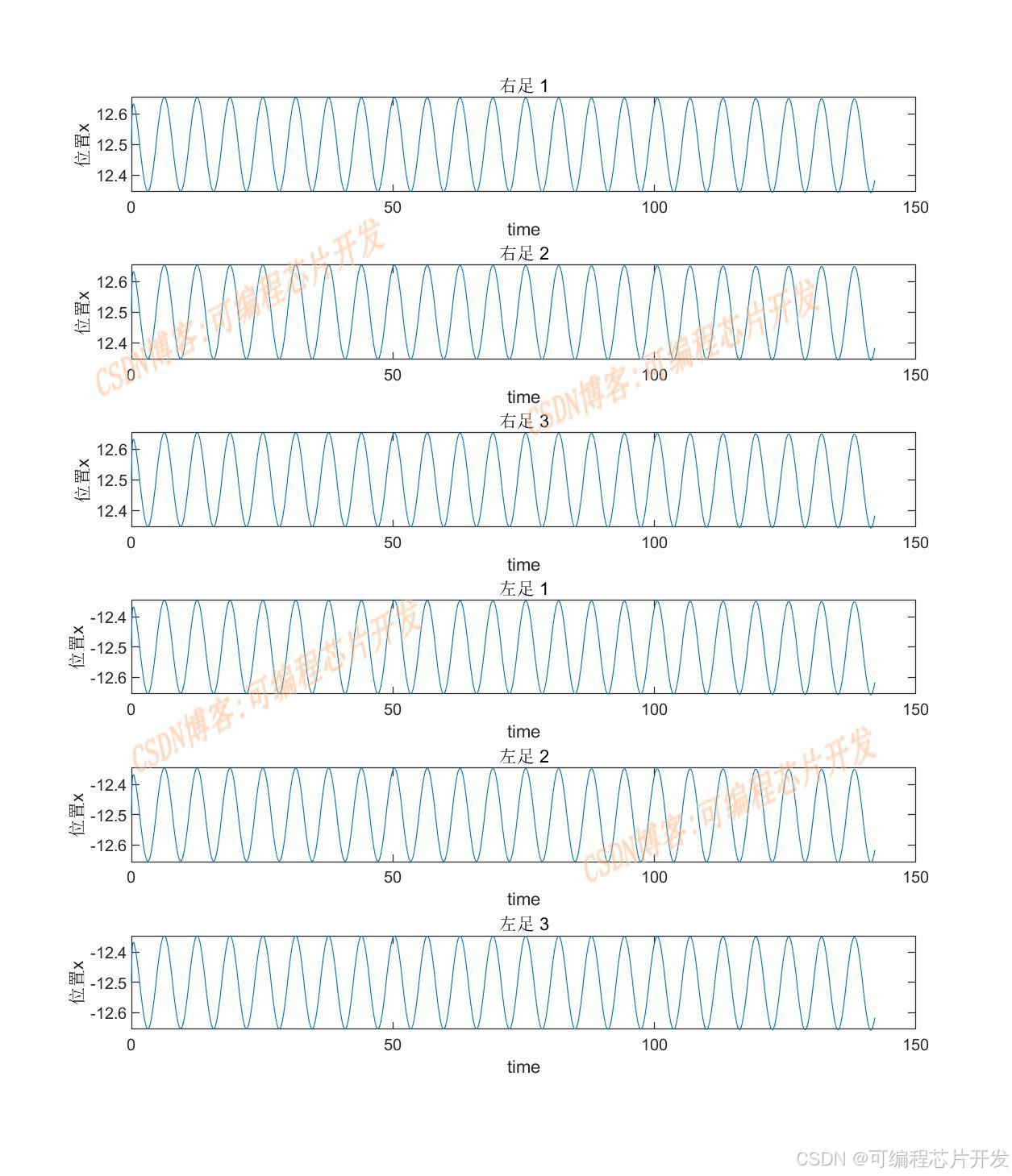
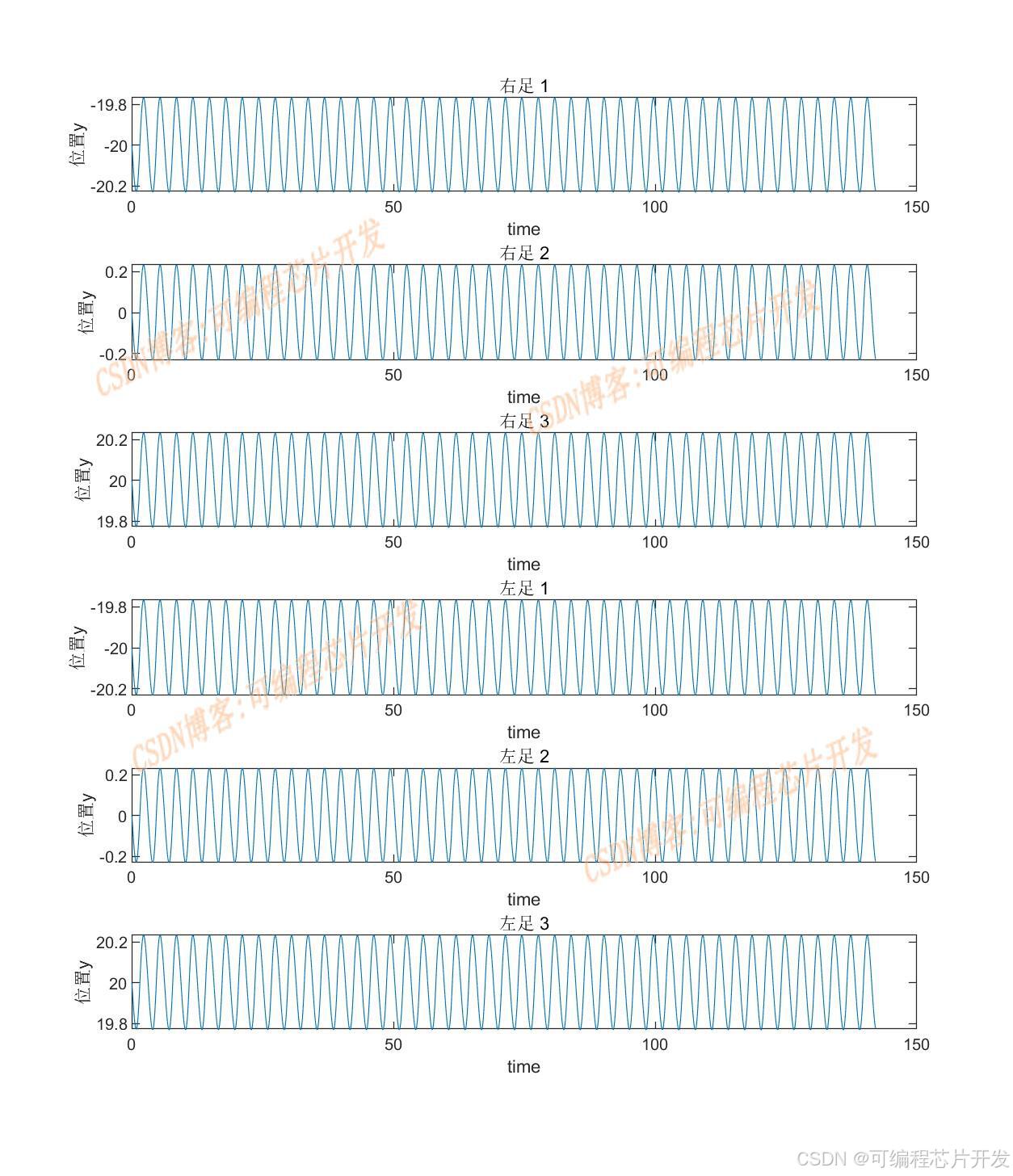
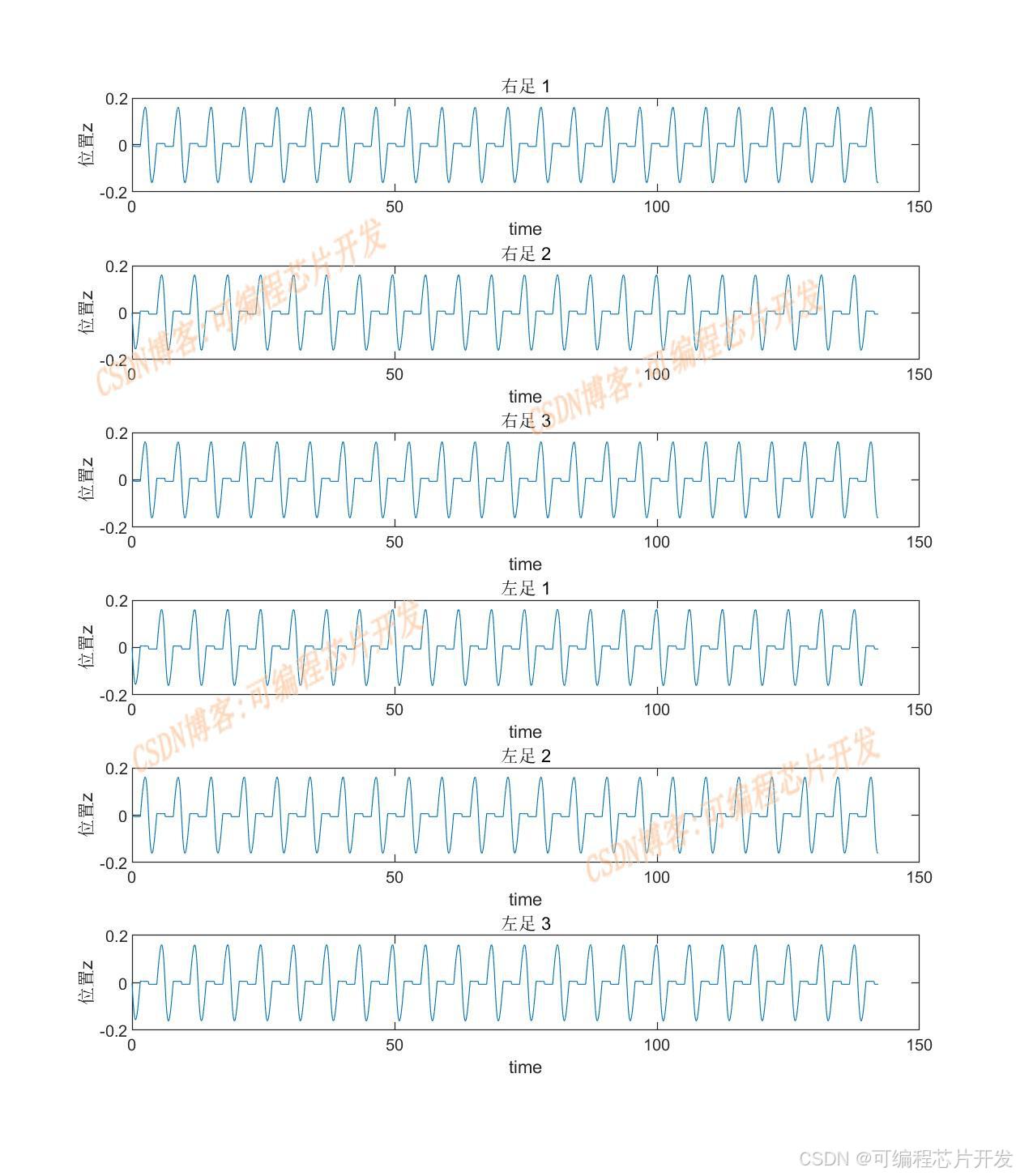
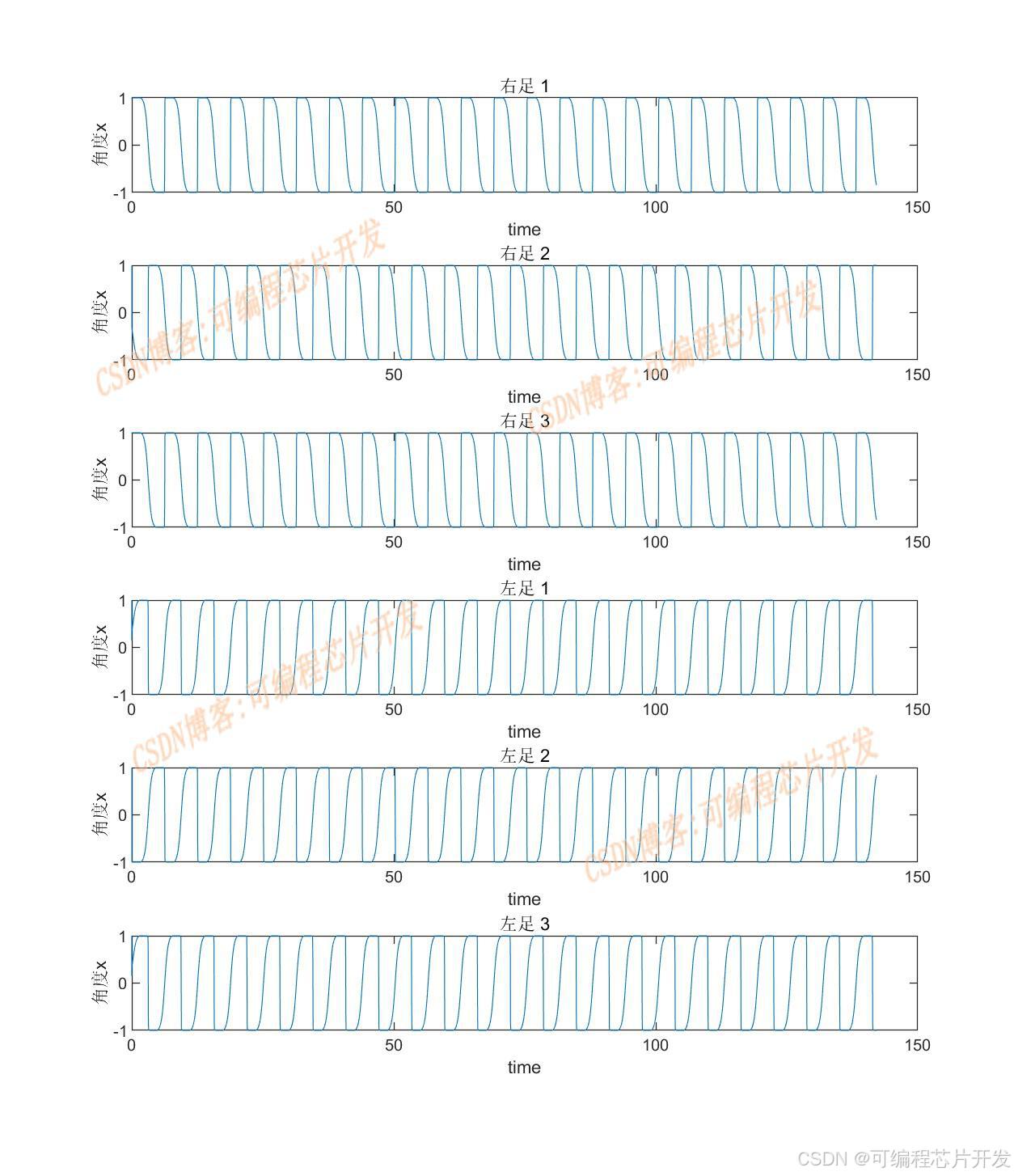
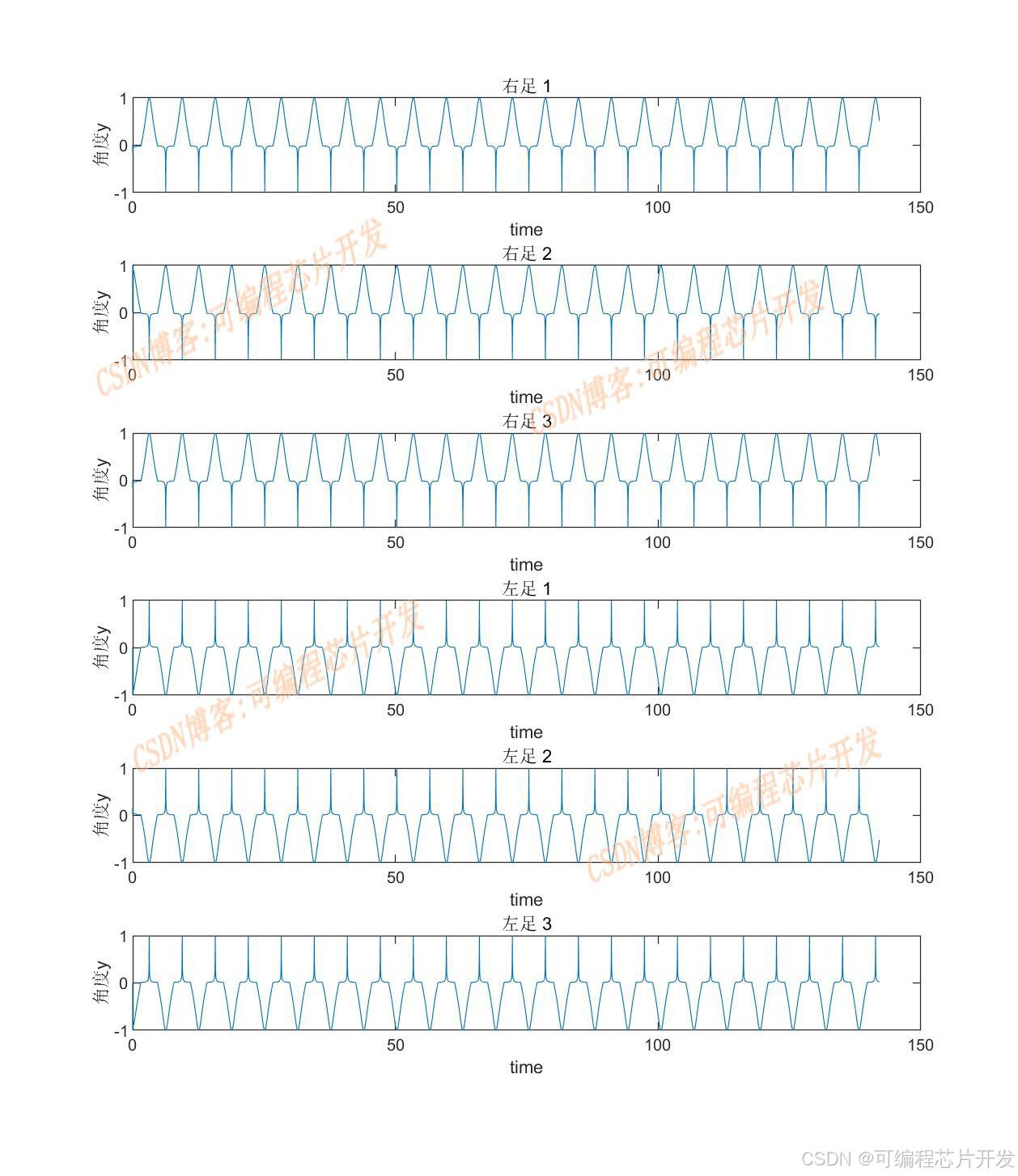
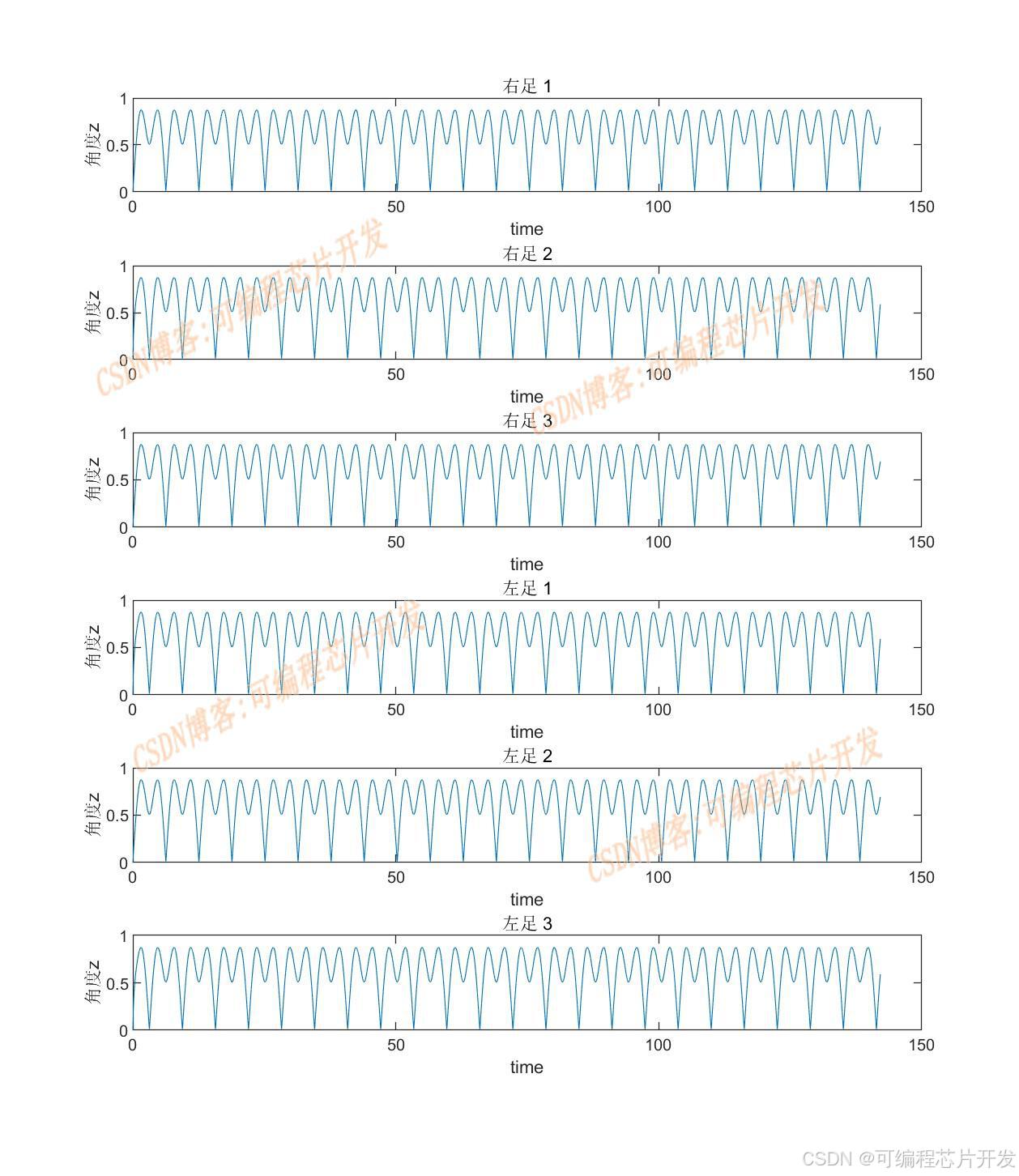
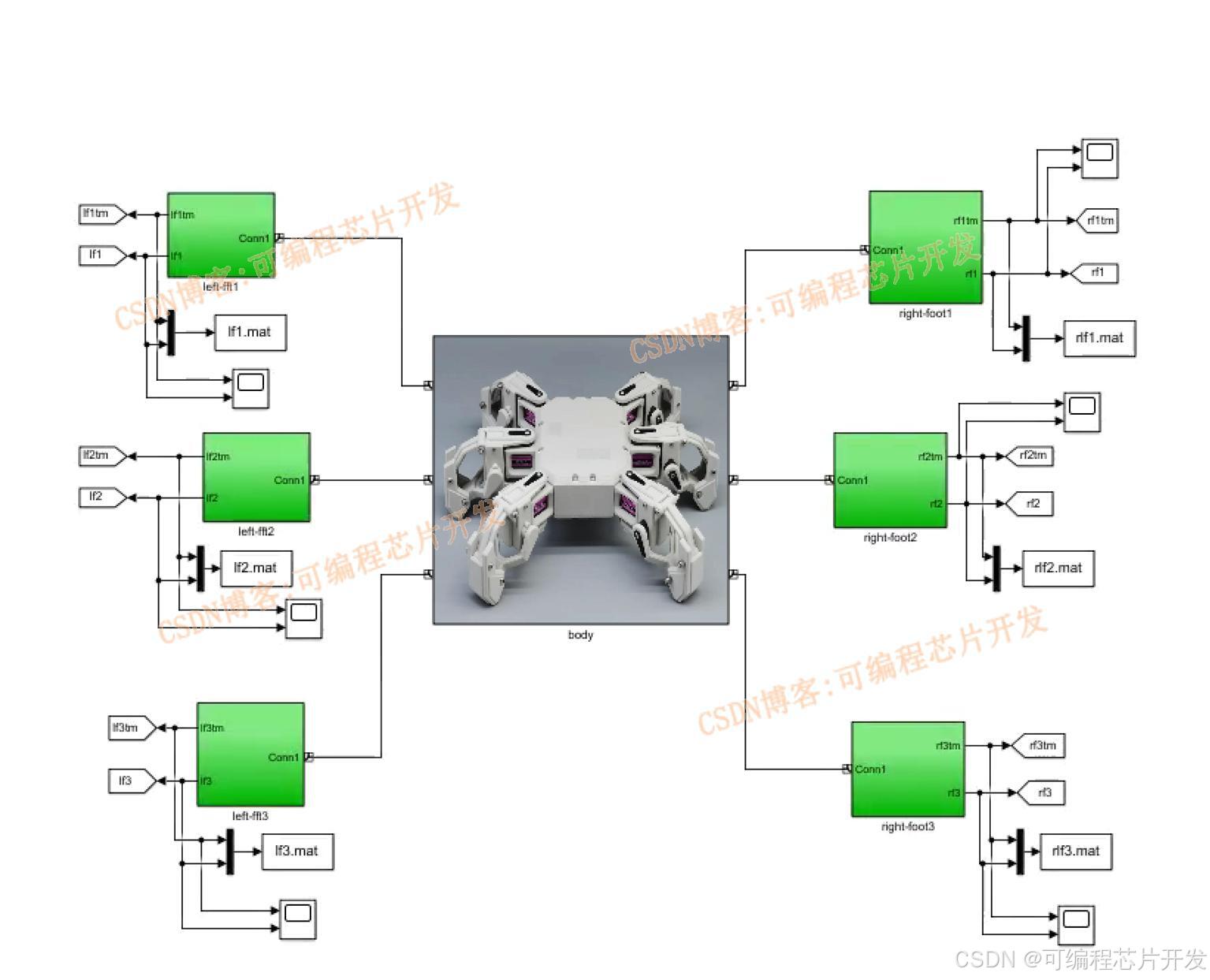
? ? ? 六足連桿爬行機器人的simulink建模與仿真。通過simulink,對六足機器人的六足以及機身進行simulink建模,模擬其行走,仿真輸出機器人行走時六足的坐標變化曲線以及關節角度變化曲線。
2.系統仿真結果
3.核心程序
matlab2024b
44_002m
4.系統原理簡介
? ? ? ?多足步行機器人的運動軌跡是一系列離散的足印運動時只需要離散的點接觸地面對環境的破壞程度也較小可以在可能到達的地面上選擇最優的支撐點對崎嶇地形的適應性強。正因為如此多足步行機器人對環境的破壞程度也較小。輪式和履帶式機器人的則是一條條連續的轍跡。崎嶇地形中往往含有巖石、泥土、沙子甚至峭壁和陡坡等障礙物可以穩定支撐機器人的連續路徑十分有限,這意味著輪式和履帶式機器人在這種地形中已經不適用。多足步行機器人的腿部具有多個自由度使運動的靈活性大大增強。它可以通過調節腿的長度保持身體水平也可以通過調節腿的伸展程度調整重心的位置因此不易翻倒穩定性更高。當然多足步行機器人也存在一些不足之處。比如為使腿部協調穩定運動從機械結構設計到控制系統算法都比較復雜相比自然界的節肢動物仿生多足步行機器人的機動性還有很大差距。
六足機器人的其核心優勢包括:
高穩定性:六足可形成至少三足支撐的穩定三角形(靜步態)或動態交替支撐(動步態);
地形適應性:多足協同可跨越障礙物、適應非結構化環境;
冗余性:單足故障時可通過步態重構維持運動。
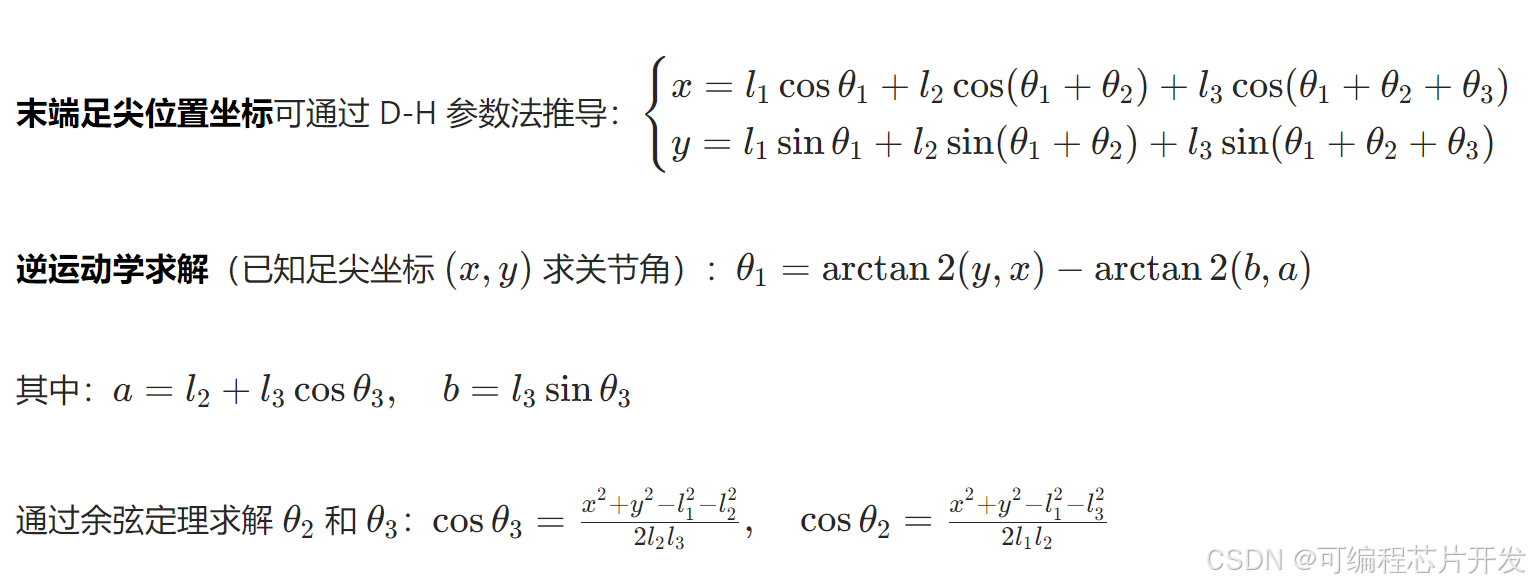
? ? ? ?設連桿長度為l1?(基節)、l2?(股節)、l3?(脛節),關節角為θ1?(髖關節俯仰角)、θ2?(膝關節俯仰角)、θ3?(踝關節俯仰角)。
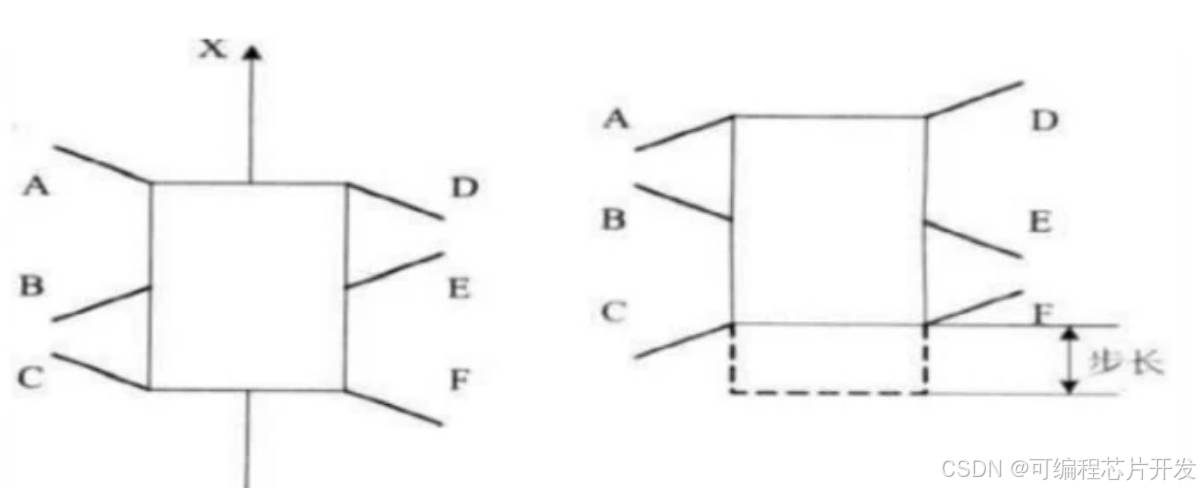
? ? ? ? 步態是指機器人步行時各腿的抬起 / 放下順序與時間配合,六足步行機器人的步態是多樣的,其中三角步態是六足步行機器人實現步行的典型步態。 “六足綱” 昆蟲步行時,一般不是六足同時直線前進,而是將三對足分成兩組,以三角形支架結構交替前行。目前,大部分六足機器人采用了仿昆蟲的結構,6條腿分布在身體的兩側,身體左側的前、后足及右側的中足為一組,右側的前、后足和左側的中足為另一組,分別組成兩個三角形支架,依靠大腿前后劃動實現支撐和擺動過程,這就是典型的三角步態行走法,如圖1所示。圖1中機器人的髖關節在水平和垂直方向上運動。此時,B、D、F 腳為擺動腳,A、C、E腳原地不動,只是支撐身體向前。由于身體重心低,不用協調Z向運動,容易穩定,所以這種行走方案能得到廣泛運用。
常見步態包括:
1.三角步態(Tripod Gait)
支撐相:三足(如左前、右中、左后)著地,形成穩定三角形;
擺動相:另三足抬起向前擺動,周期為?T;
步速公式:v=2s/T?, 其中s為單腿步長。
2.波浪步態(Wave Gait)
順序抬足:腿部按軀體縱向順序依次擺動(如左前→左中→左后→右前→右中→右后);
相位差:相鄰腿擺動相位差為?Δ?=2π/6=π/3;
3.穩定性判據:任何時刻至少 4 足著地,適用于低速高精度場景。
動態步態(Dynamic Gait)
質心控制:通過調整軀體姿態(俯仰角?α、側傾角?β)改變重心位置,避免翻倒;
5.完整工程文件
v
:2024 年物聯網概述)
-- HttpMessageConverter 消息轉換器)


![[解決方案] Word轉PDF](http://pic.xiahunao.cn/[解決方案] Word轉PDF)



:前端框架性能優化深度解析)










