1.什么是3D高斯潑濺(3D Gaussian Splatting)?
目標:從一組稀疏的3D點(比如通過相機或激光雷達采集的點云)重建出高質量的3D場景,并支持實時渲染。
核心思想:用許多“3D高斯分布”(類似橢球形的光滑斑點)來表示場景中的物體表面。這些“斑點”可以靈活變形、旋轉或縮放,從而更精準地擬合復雜形狀。
類比理解:
想象用一堆“棉花糖”拼成一個3D模型:每個棉花糖可以壓扁、拉長或旋轉(各向異性),最后所有棉花糖組合起來就能逼真地還原一個物體(比如一只貓或一棟建筑)。
2. 貢獻點逐條解析
貢獻1:各向異性(anisotropic)的3D高斯分布
- 各向異性:指高斯分布的形狀在不同方向上可以不同(比如橢球可以是扁的或長的,而不僅是圓形)。為什么重要? 真實世界的物體表面有各種復雜朝向(比如地面是平的,樹干是豎的),各向異性讓高斯分布能更貼合這些形狀。
- 非結構化輻射場:傳統方法(如NeRF)需要規則網格或隱式函數,而高斯潑濺直接用離散的高斯斑點自由表達,更靈活高效。
貢獻2:GPU快速可微渲染
-
可微渲染:渲染過程支持自動求導(即可以通過損失函數反向傳播優化高斯參數)。
- 拋雪球(Splatting):將3D高斯投影到2D屏幕上時,像“潑雪球”一樣模糊化處理,避免鋸齒或空洞。
- GPU加速:利用并行計算實時渲染大量高斯斑點。
“拋雪球”(Splatting) 是計算機圖形學中一種 將3D數據投影到2D屏幕 的渲染技術,常用于點云或體素(體積像素)的實時可視化。它的核心思想是:把每個3D點看作一個“柔軟的雪球”,投影到2D屏幕上時會像雪球砸到地面一樣“攤開”成一個模糊的圓形或橢圓形斑點,從而避免直接渲染離散點導致的空洞或鋸齒問題。
貢獻3:優化與自適應密度控制
- 優化方法:訓練過程中動態調整高斯斑點的位置、形狀、透明度等參數,使重建更精準。
- 自適應密度:根據場景復雜度增減高斯斑點(比如細節多的區域自動增加斑點,平坦區域減少)。
3.預備知識
1.一維高斯分布(1D Gaussian Distribution)
概念:一維高斯分布描述的是?單個隨機變量?的概率分布,其圖像是經典的“鐘形曲線”。例如:人的身高、測量誤差等通常服從高斯分布。
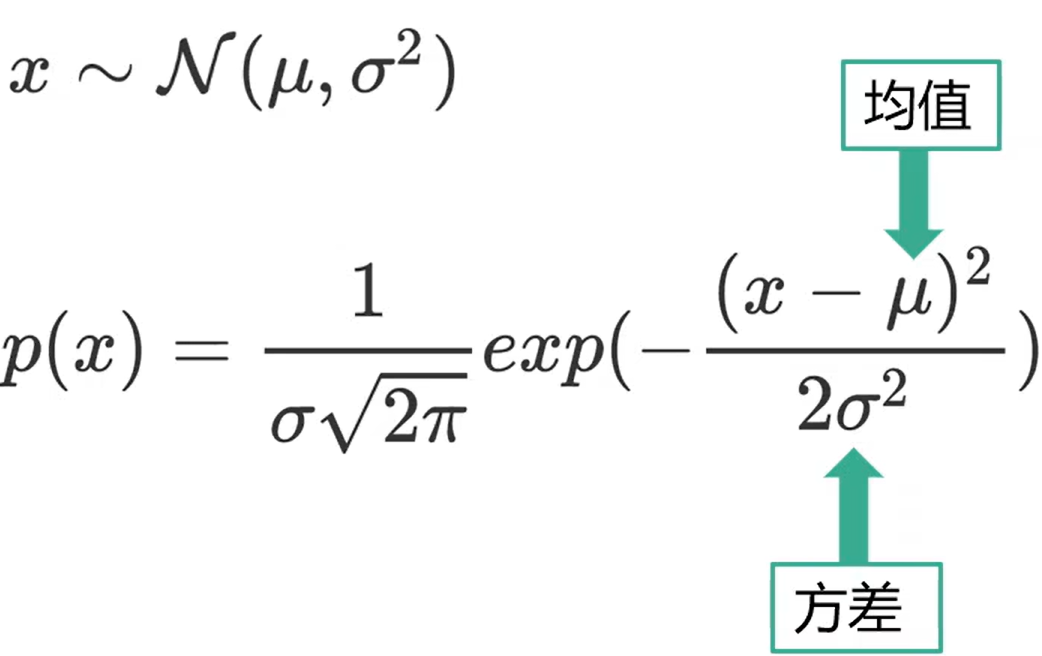
- 𝜇:均值(Mean),決定分布的中心位置。
- 𝜎:標準差(Standard Deviation),控制分布的“寬窄”(𝜎?越大,曲線越扁平)。
- 𝜎2:方差(Variance)
^| ......| . .| . .
f(x) | . .| . .|. .+-----------------------> xμ-σ μ μ+σ曲線在?𝑥=𝜇處取得最大值。約 68% 的數據落在?(𝜇?𝜎,𝜇+𝜎)?區間內,95% 落在?(𝜇?2𝜎,𝜇+2𝜎)?內。
2.三維高斯分布(3D Gaussian Distribution)
概念:三維高斯分布描述的是?三個變量(如空間中的x, y, z坐標)?的聯合分布。在3D高斯潑濺中,每個“高斯斑點”就是一個三維高斯分布,可以旋轉、拉伸(各向異性),用來擬合3D物體表面。

- 𝑥=[𝑥,𝑦,𝑧]𝑇:三維空間中的一個點。
- 𝜇=[𝜇𝑥,𝜇𝑦,𝜇𝑧]𝑇:均值向量,決定分布的中心位置。
- 𝛴:3×3協方差矩陣,控制分布的形狀(大小、旋轉、拉伸)。
協方差矩陣?𝛴?的作用
協方差矩陣決定了高斯分布的 形狀和方向:
- 對角元素(
):控制沿x、y、z軸的縮放(方差)。
- 非對角元素(
):控制不同維度之間的相關性(即旋轉或傾斜)。
例子:
- 如果?𝛴?是對角矩陣(非對角元素為0),則高斯分布是軸對齊的橢球。
Σ = [σ_x2 0 00 σ_y2 00 0 σ_z2]- 如果非對角元素非零,則高斯分布是旋轉的橢球(各向異性)。
3.可視化學習
(1)一維高斯分布可視化→ 理解均值和標準差
import numpy as np
import matplotlib.pyplot as plt# 定義高斯函數
def gaussian_1d(x, mu=0, sigma=1):return (1 / (sigma * np.sqrt(2 * np.pi))) * np.exp(-0.5 * ((x - mu) / sigma)**2)# 生成數據
x = np.linspace(-5, 5, 500) # x范圍
mu = 0 # 均值
sigma = 1 # 標準差# 計算概率密度
pdf = gaussian_1d(x, mu, sigma)# 繪圖
plt.figure(figsize=(8, 4))
plt.plot(x, pdf, 'b-', linewidth=2, label=f'μ={mu}, σ={sigma}')
plt.title('1D Gaussian Distribution')
plt.xlabel('x')
plt.ylabel('Probability Density')
plt.legend()
plt.grid(True)
plt.show()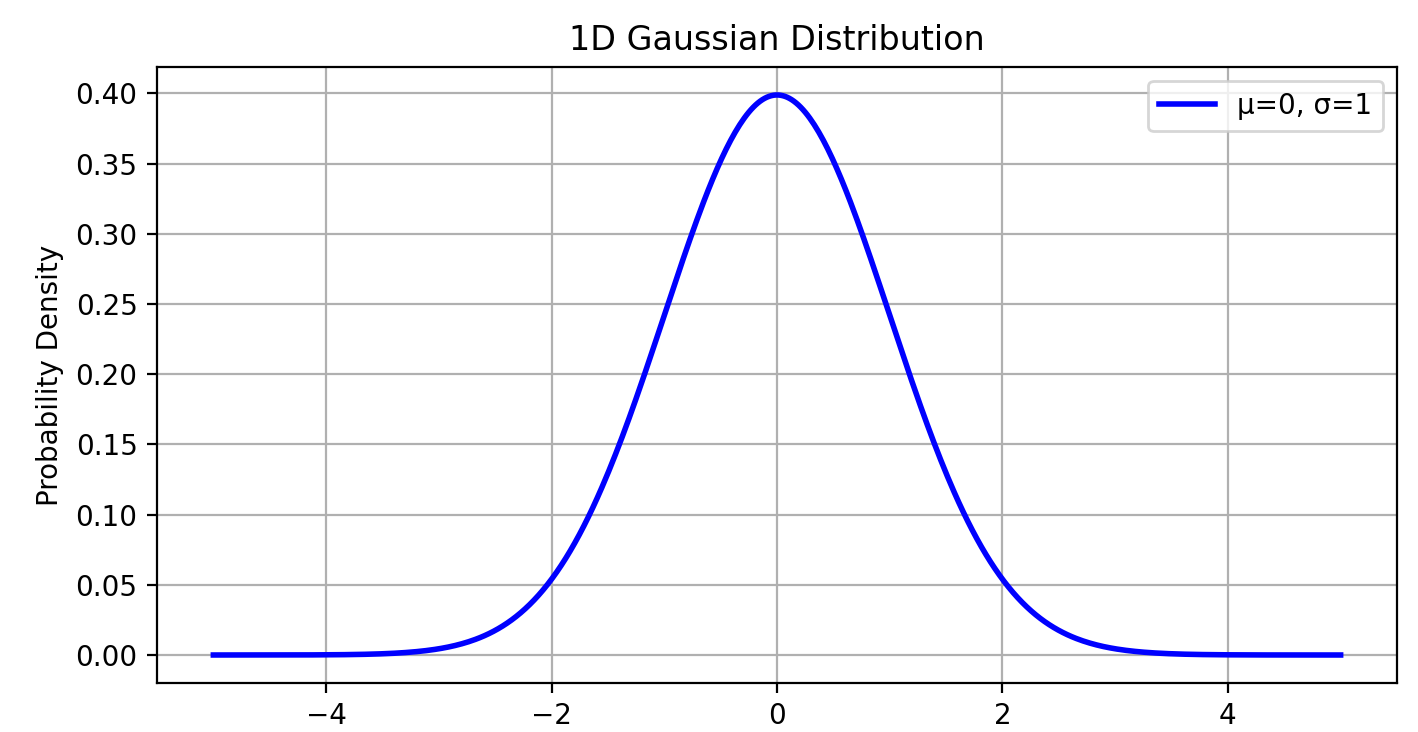
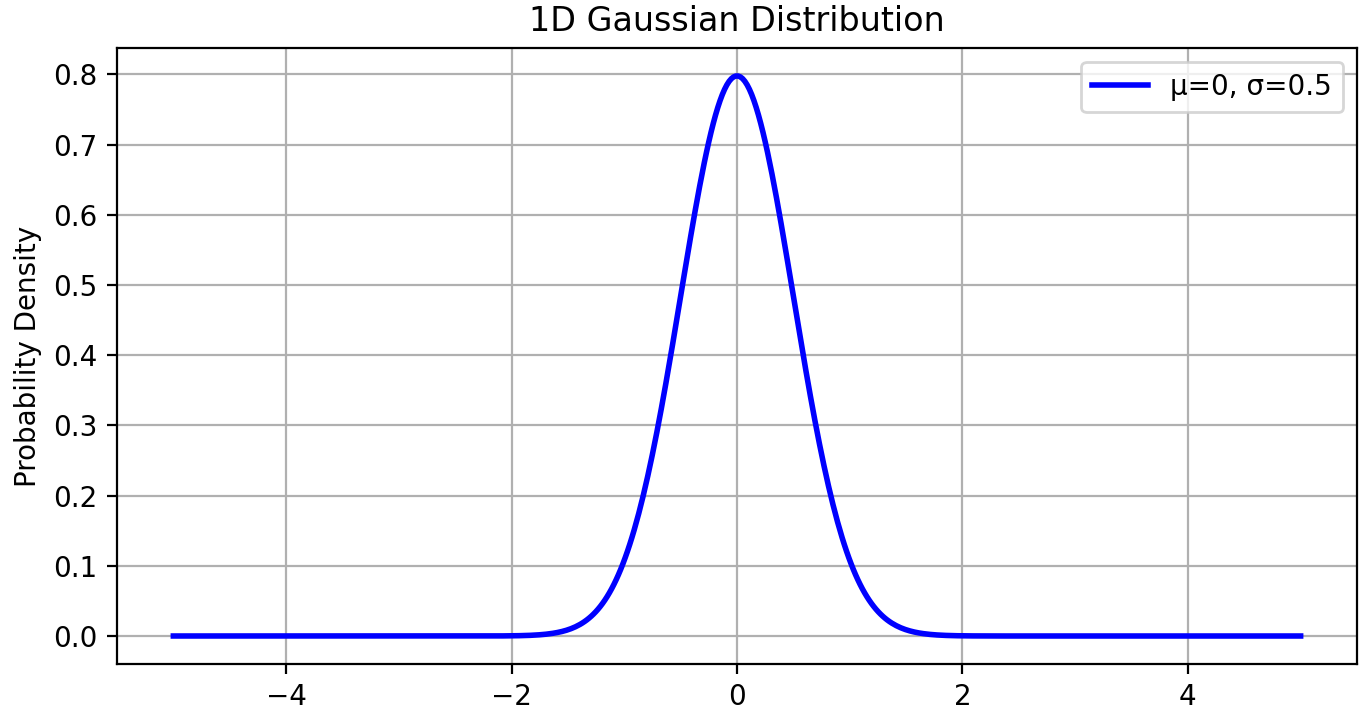
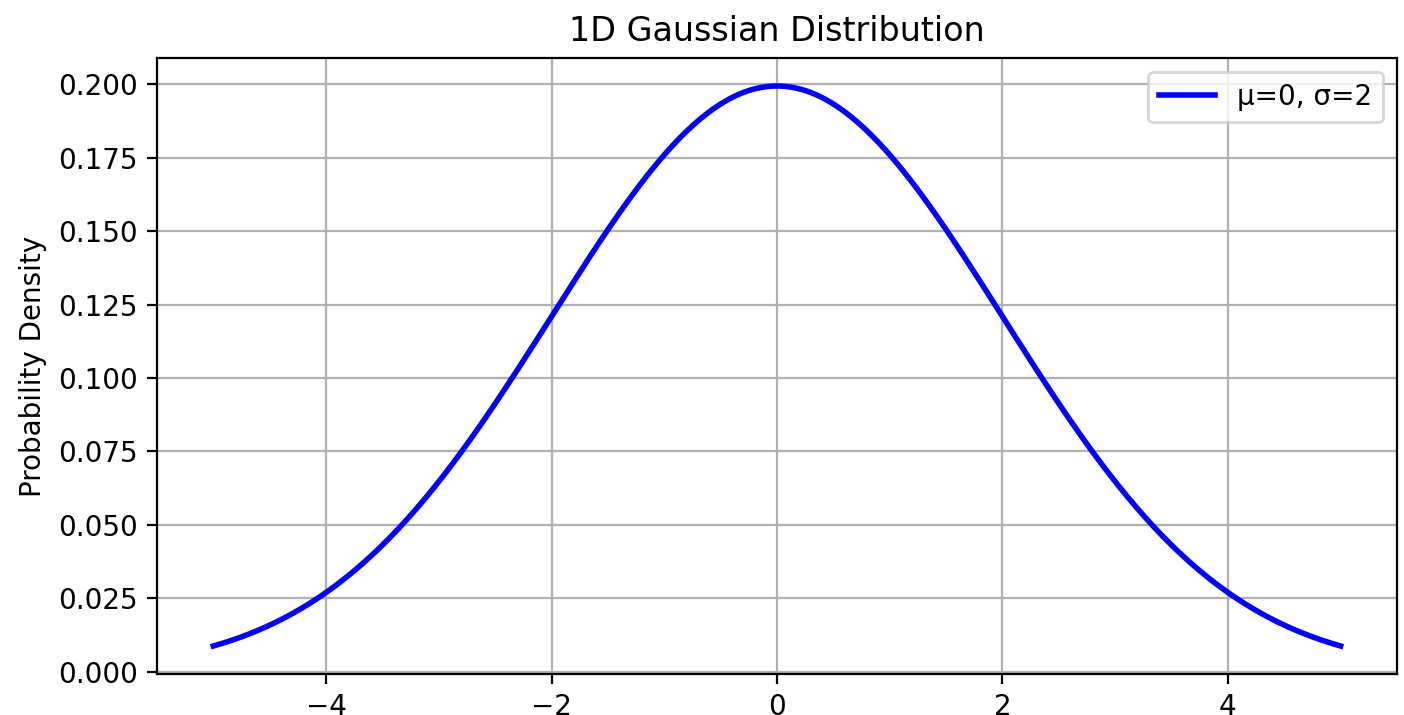
- 改變 𝜇 會平移曲線,改變 𝜎會調整曲線的“胖瘦”。
(2)二維高斯分布可視化→ 理解協方差矩陣控制形狀
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D# 定義二維高斯函數
def gaussian_2d(x, y, mu_x=0, mu_y=0, sigma_x=1, sigma_y=1, rho=0):"""rho: 相關系數(控制旋轉)"""z = (1 / (2 * np.pi * sigma_x * sigma_y * np.sqrt(1 - rho**2))) * np.exp(-0.5 / (1 - rho**2) * (((x - mu_x) / sigma_x)**2 +((y - mu_y) / sigma_y)**2 -2 * rho * (x - mu_x) * (y - mu_y) / (sigma_x * sigma_y)))return z# 生成網格
x = np.linspace(-5, 5, 100)
y = np.linspace(-5, 5, 100)
X, Y = np.meshgrid(x, y)# 案例1:各向同性(圓形)
Z_iso = gaussian_2d(X, Y, sigma_x=1, sigma_y=1, rho=0)# 案例2:各向異性(橢圓,旋轉45度)
Z_aniso = gaussian_2d(X, Y, sigma_x=2, sigma_y=0.5, rho=0.5)# 繪制3D圖
fig = plt.figure(figsize=(12, 6))ax1 = fig.add_subplot(121, projection='3d')
ax1.plot_surface(X, Y, Z_iso, cmap='viridis')
ax1.set_title('Isotropic Gaussian (σ_x=σ_y)')ax2 = fig.add_subplot(122, projection='3d')
ax2.plot_surface(X, Y, Z_aniso, cmap='plasma')
ax2.set_title('Anisotropic Gaussian (σ_x≠σ_y, ρ≠0)')plt.tight_layout()
plt.show()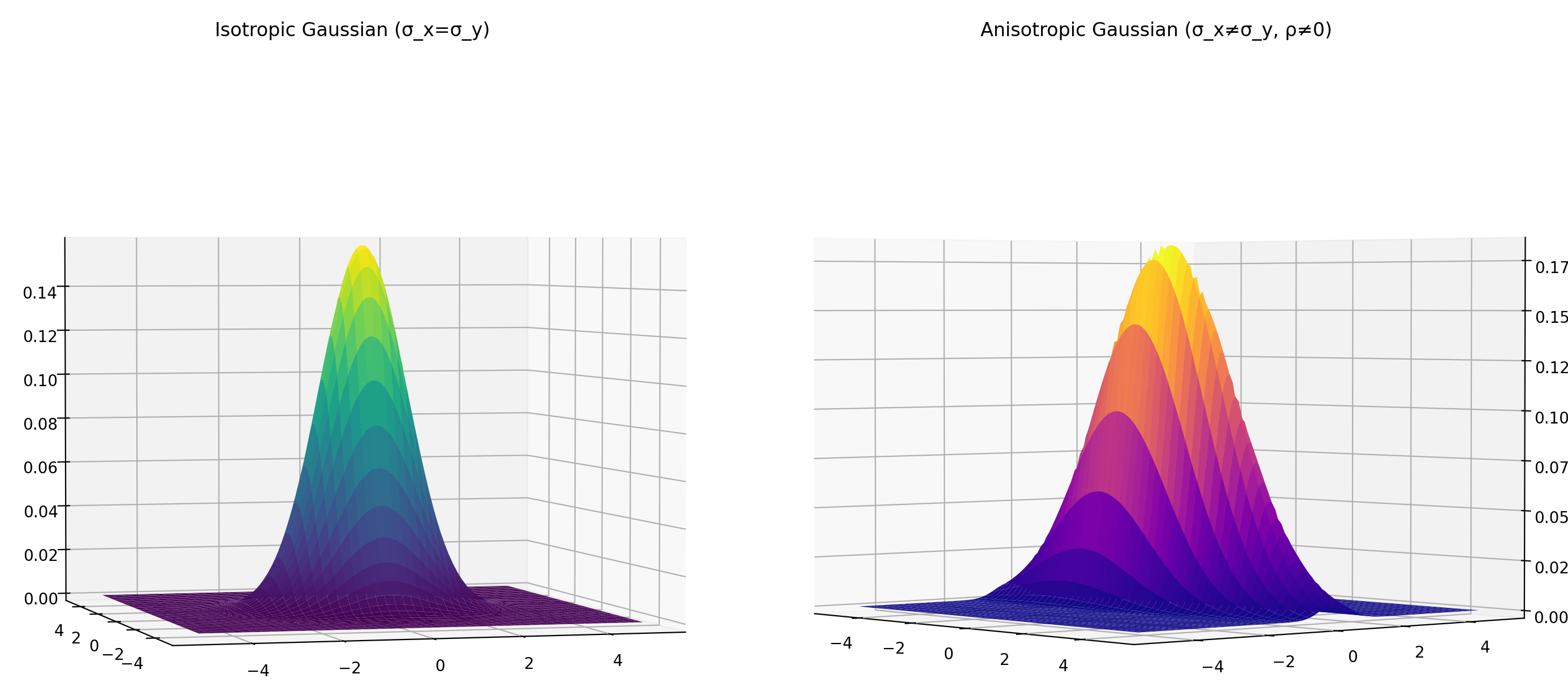
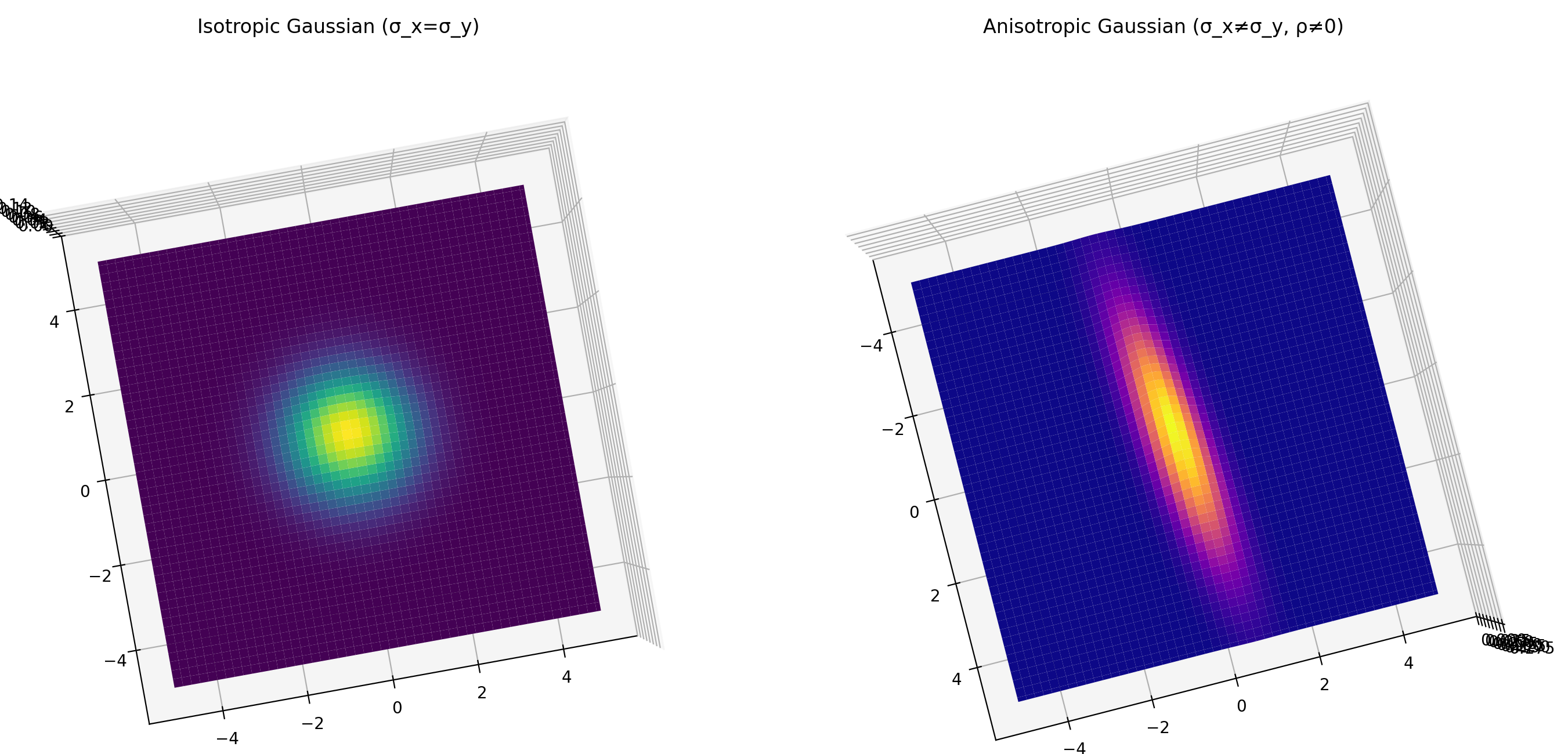
- 各向同性:等高線是圓形(sigma_x = sigma_y)。
- 各向異性:等高線是橢圓(通過 sigma_x、sigma_y 和 rho 控制拉伸和旋轉)。
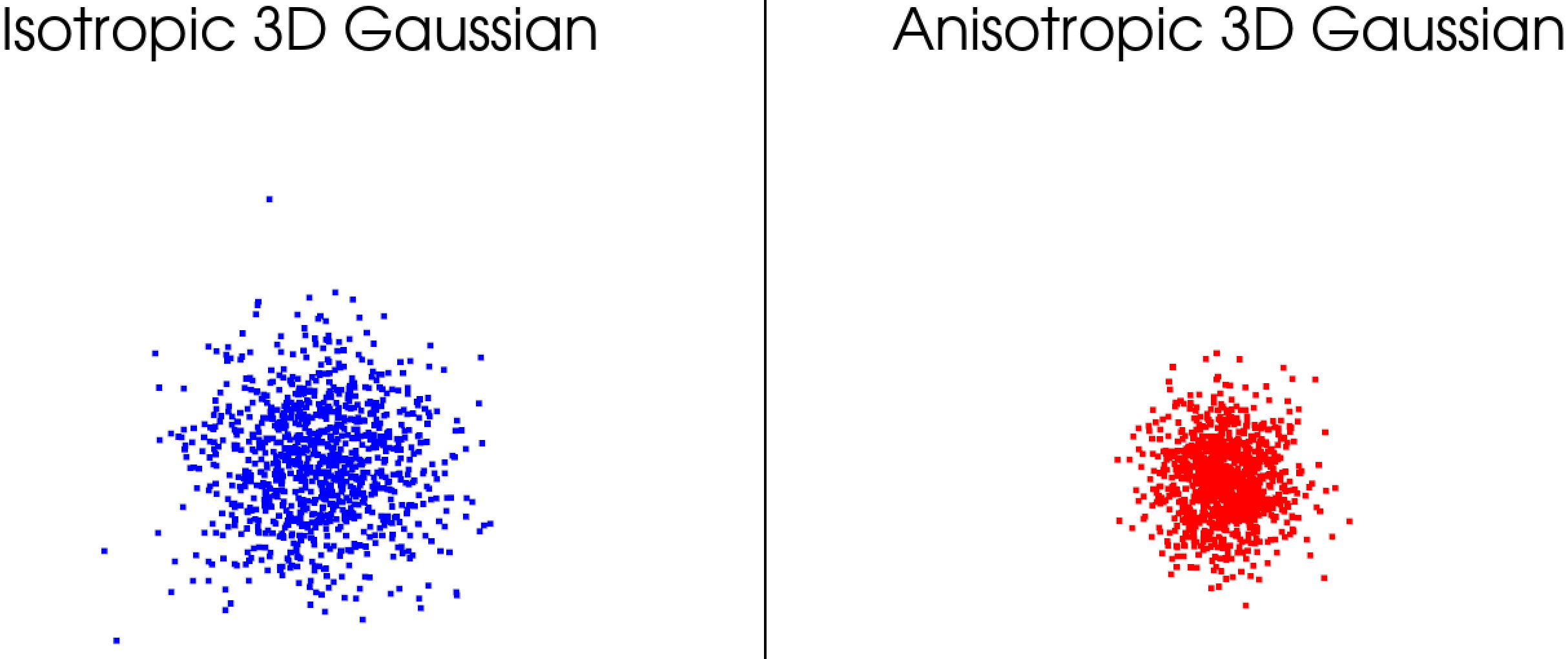
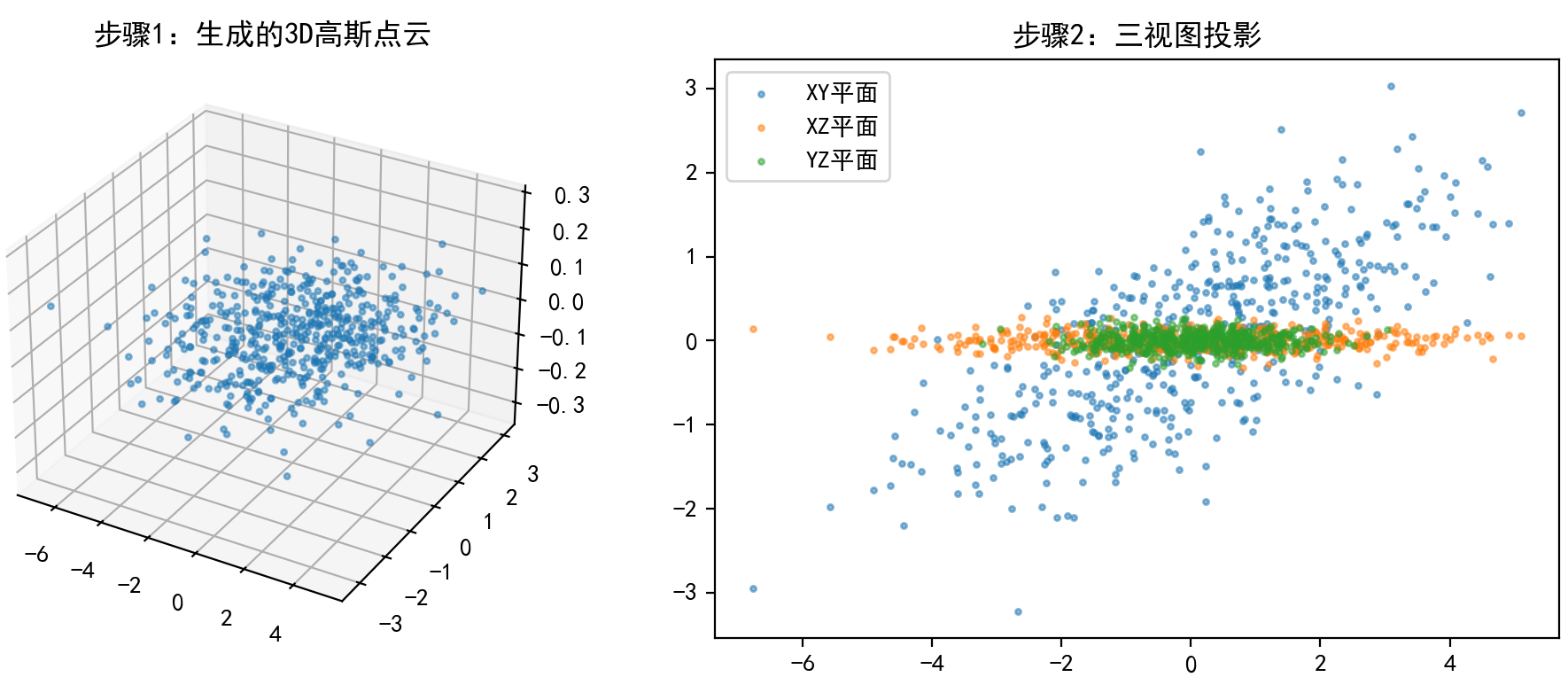
(3)三維高斯分布可視化→ 掌握各向異性橢球的生成
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3Dimport pyvista as pvdef generate_3d_gaussian(mu=[0, 0, 0], cov=[[1, 0, 0], [0, 1, 0], [0, 0, 1]], n_points=1000):"""生成3D高斯分布點云"""points = np.random.multivariate_normal(mu, cov, size=n_points)return points# 案例1:各向同性(球體)
points_iso = generate_3d_gaussian(cov=np.eye(3))# 案例2:各向異性(橢球,拉伸和旋轉)
cov_aniso = [[2, 1, 0], [1, 1, 0], [0, 0, 0.5]] # 協方差矩陣
points_aniso = generate_3d_gaussian(cov=cov_aniso)# 可視化
plotter = pv.Plotter(shape=(1, 2))plotter.subplot(0, 0)
plotter.add_points(points_iso, color='blue', point_size=5)
plotter.add_title('Isotropic 3D Gaussian')plotter.subplot(0, 1)
plotter.add_points(points_aniso, color='red', point_size=5)
plotter.add_title('Anisotropic 3D Gaussian')plotter.show()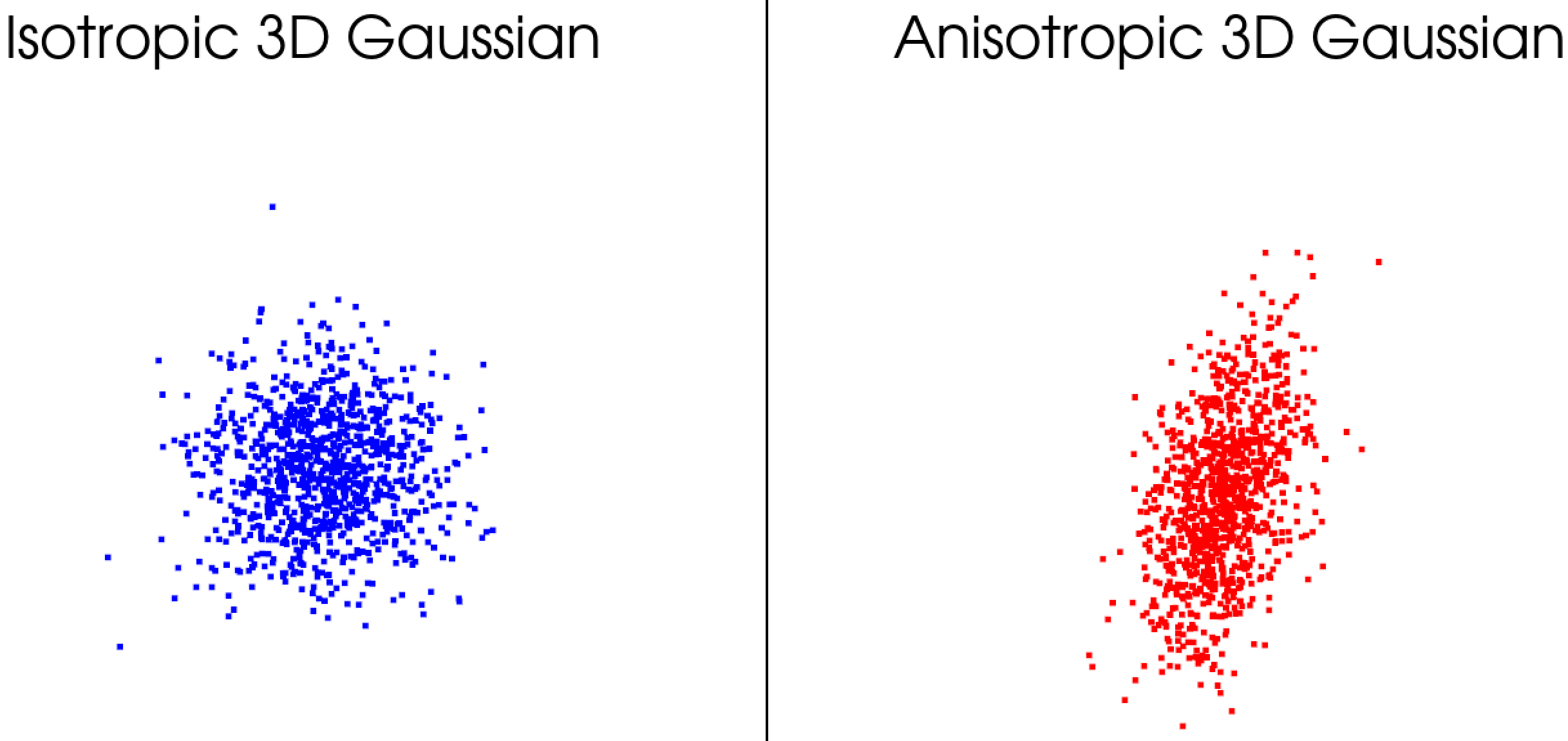
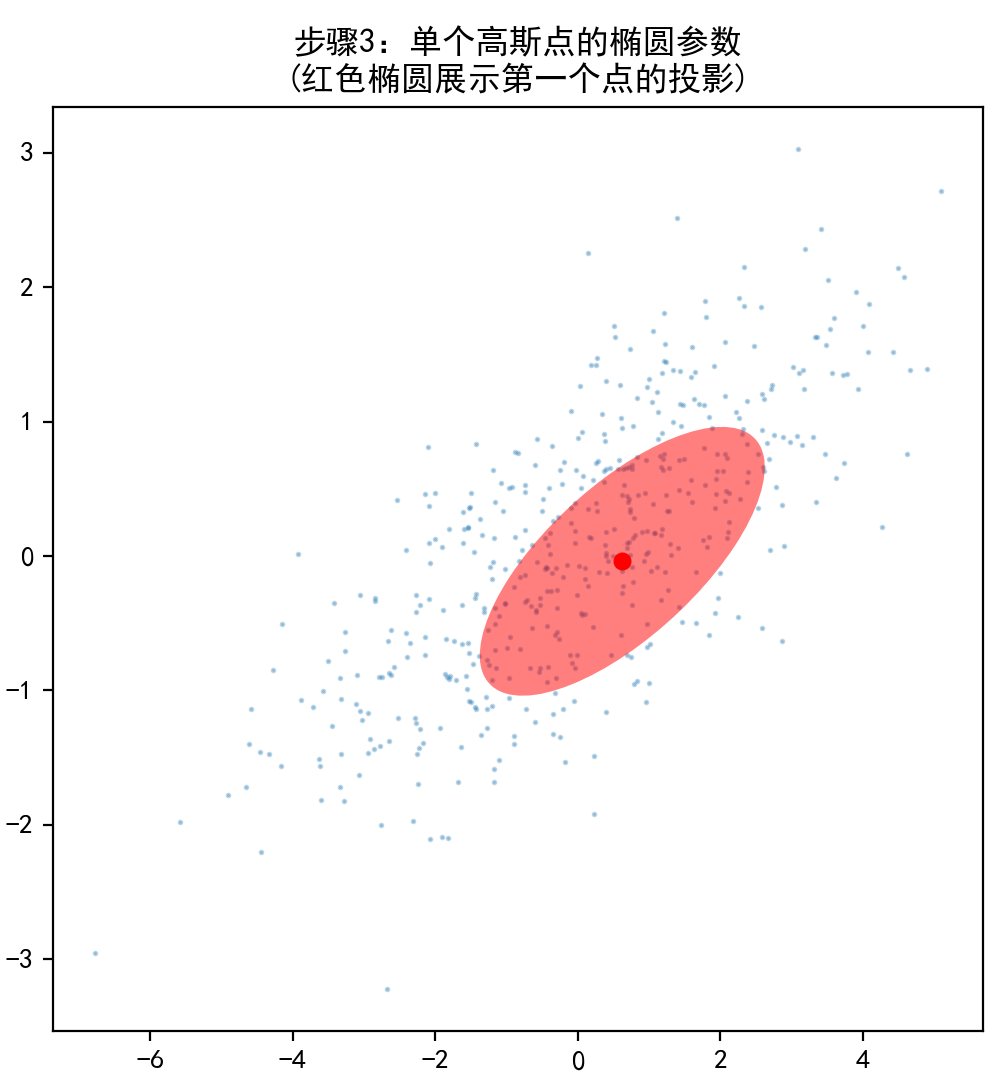
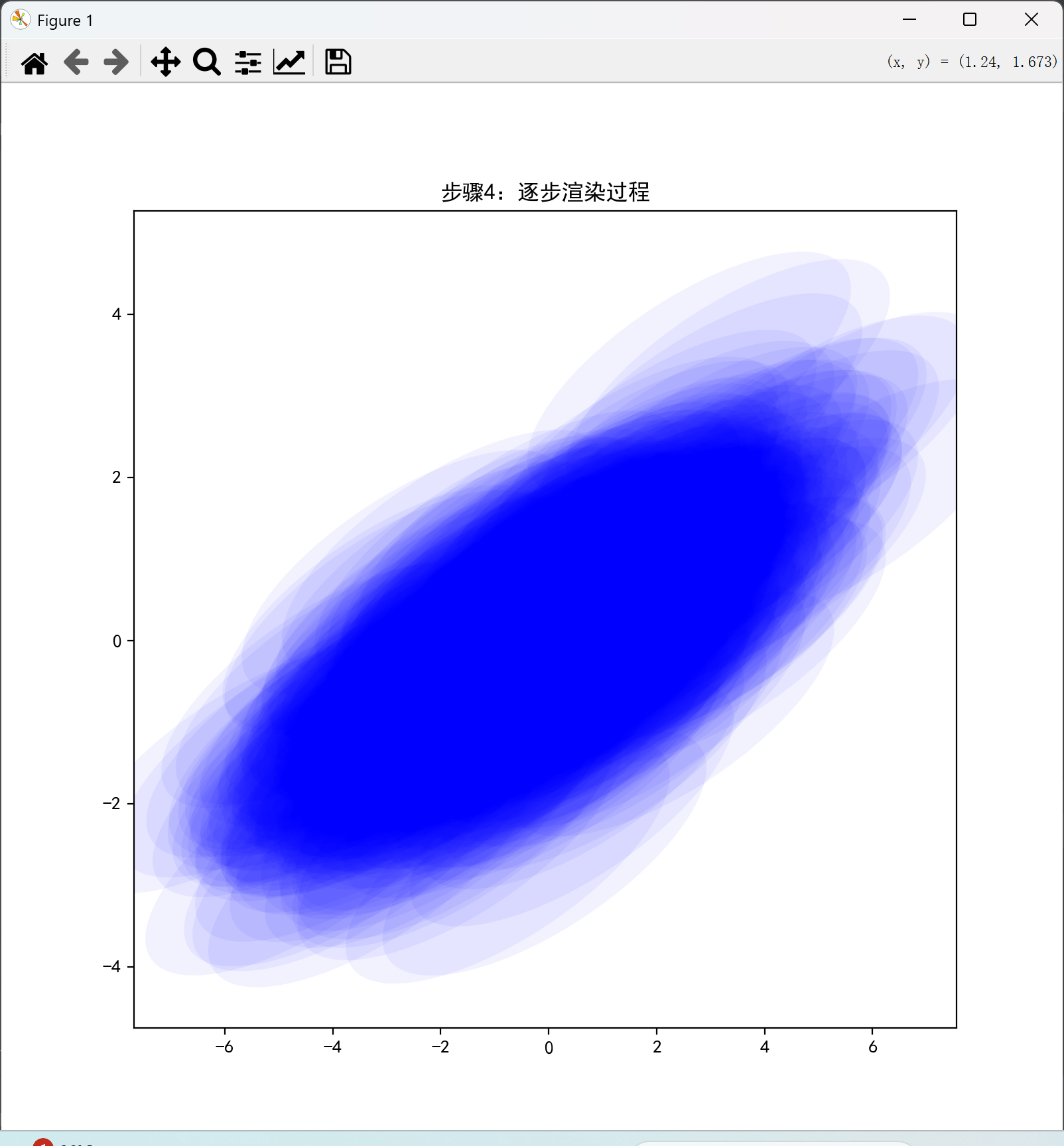
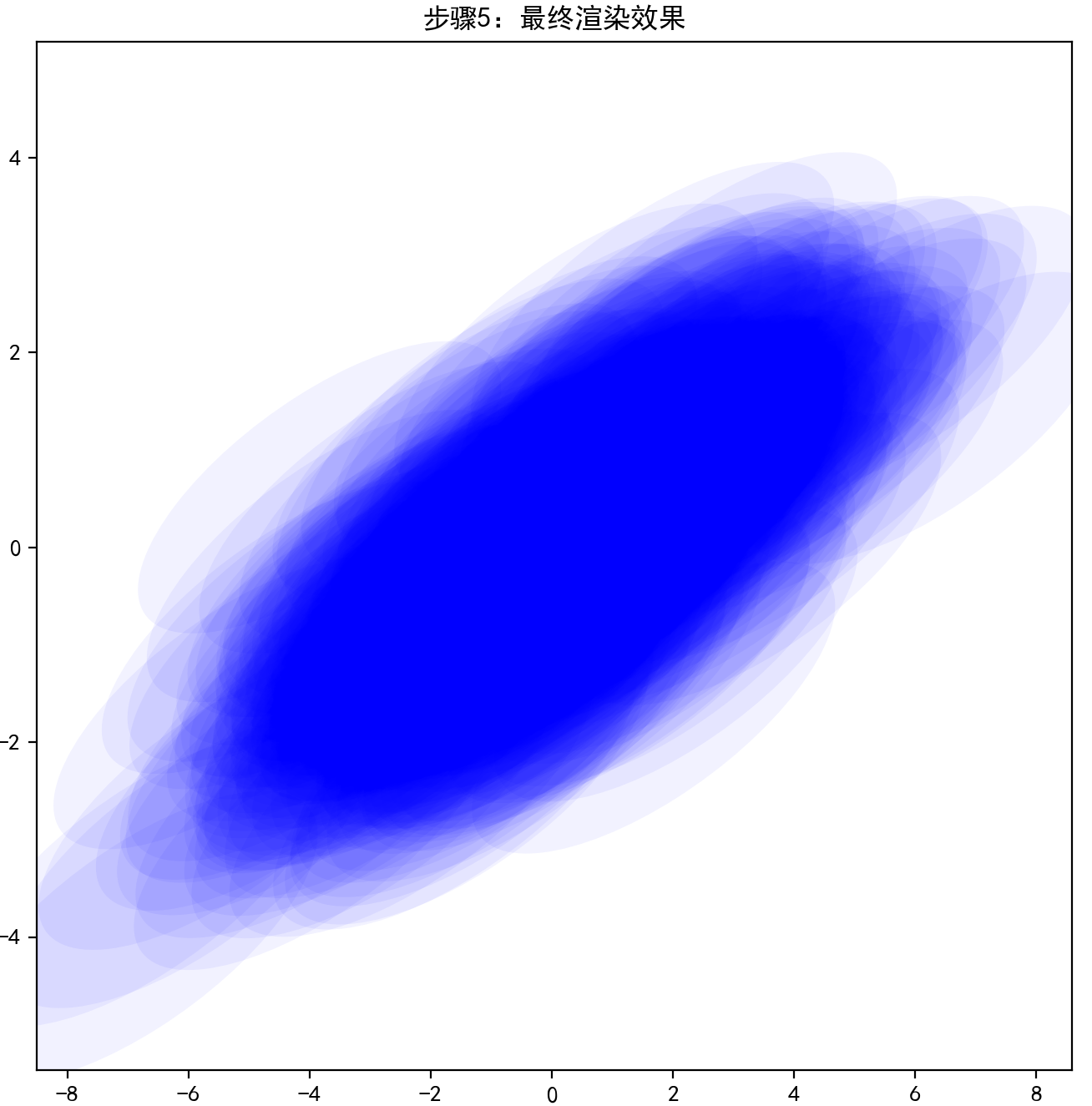
(4)3D潑濺?→ 理解投影和渲染邏輯。
4.3D 幾何與坐標變換
在 3D Gaussian Splatting 中,我們需要將一個在三維空間中表示的高斯分布(點)投影到圖像平面上。這一過程涉及多個坐標系之間的轉換:世界坐標系、相機坐標系、圖像坐標系。為了理解這個過程,首先要掌握基本的三維幾何與坐標變換知識。
三維坐標系的種類
| 坐標系名稱 | 說明 |
|---|---|
| 世界坐標系(World Coordinate System) | 場景中所有物體的統一參考坐標系。 |
| 相機坐標系(Camera Coordinate System) | 以相機為原點的坐標系,Z軸朝向視線方向。 |
| 圖像坐標系(Image Coordinate System) | 圖像上的像素位置(通常是 2D 坐標)。 |
高斯點最初位于世界坐標系,但為了在屏幕上正確繪制它,我們必須將其轉換到圖像坐標系。
坐標變換流程
世界坐標 P_world
→ 相機坐標 P_camera = [R | t] * P_world(外參矩陣)
→ NDC(標準設備坐標) → 圖像坐標(像素位置)
解釋:
-
R是旋轉矩陣(3×3) -
t是平移向量(3×1) -
[R | t]組成了 外參矩陣,將世界坐標變換到相機坐標 -
然后乘上 投影矩陣(內參),將相機坐標轉換到圖像平面
齊次坐標與變換矩陣
為統一表達旋轉、平移等操作,我們使用齊次坐標(Homogeneous Coordinates):
-
一個三維點
P = [x, y, z]→ 齊次形式為[x, y, z, 1]^T
坐標變換統一用 4×4 矩陣表示:
P_camera = T_view * P_world
T_view = | R t || 0 1 |
繼續投影到圖像空間:
P_image = K * T_view * P_world
其中:
-
K是相機內參矩陣,包含焦距、主點等; -
P_image是圖像平面上的點。
應用于 Gaussian Splatting 的場景
在 Gaussian Splatting 中,每個三維高斯分布點都有其位置(中心點)、方向(協方差矩陣)等參數。這些點需要經過上述變換,從世界空間轉換到相機空間,并最終以一種“模糊點”(splat)的方式渲染到圖像上。因此,理解坐標變換過程是后續理解高斯渲染公式、遮擋處理、深度排序等機制的基礎。
5.相機模型與投影過程
在 Gaussian Splatting 中,我們需要將三維空間中的高斯點“投影”到二維圖像平面上,就像真實相機將三維世界成像到一張照片上一樣。這個過程依賴于相機模型,它描述了從 3D 點到 2D 像素的轉換方式。
什么是相機模型?
相機模型是一種數學模型,模擬真實相機是如何拍攝一張照片的。它包括兩個主要部分:
| 類型 | 描述 | 關鍵內容 |
|---|---|---|
| 外參(Extrinsic Parameters) | 描述相機在世界中的位置和朝向 | 用旋轉矩陣 R 和位移向量 t 表示 |
| 內參(Intrinsic Parameters) | 描述相機的內部結構與成像方式 | 焦距、主點、圖像尺寸、像素間距等 |
相機投影原理
我們可以類比真實世界:
📸 相機就像一個小孔,把三維空間的光線投射到一個二維圖像平面上。
數學表達為:
P_image = K × [R | t] × P_world
其中:
-
P_world是世界坐標中的 3D 點 -
[R | t]是外參矩陣,將世界坐標轉換為相機坐標 -
K是內參矩陣,將相機坐標轉換為圖像平面坐標(像素)
相機坐標 → 圖像坐標的步驟
第一步:世界坐標 → 相機坐標

這個變換告訴我們:相機看到的點在它本地坐標系中長什么樣。
第二步:相機坐標 → 歸一化圖像坐標(投影)

這是“透視投影”的核心思想 —— 離相機越遠的點,看起來越小。
第三步:歸一化 → 像素坐標(通過內參矩陣)

-
(u, v)是圖像上的像素位置; -
fx, fy是像素方向上的焦距(單位:像素); -
(cx, cy)是圖像中心點(principal point)。
實際意義:從 3D 到 2D 的投影
整個流程可以形象理解為:
真實世界中的3D點(例如樹的一片葉子)
→ 相機觀察它的視角(R, t)
→ 計算它落在圖像哪個像素位置(通過K)
6.體積渲染與透明度混合
在 Gaussian Splatting 和 NeRF 等技術中,傳統的“繪制網格三角形”的方式被替代為“模擬光穿過一個透明體積的過程”,這就是體積渲染。它的目標是:從一個視角出發,計算每條光線穿過空間時,最終在圖像像素上看到的顏色。
什么是體積渲染?
體積渲染是通過對光線在三維空間中的“穿行過程”建模,計算出最終像素顏色的技術。
我們可以想象,視線(光線)從相機發出,穿過一段“有顏色和透明度”的霧狀體積,最終到達我們的眼睛。在這段路徑上,顏色不斷“疊加”,這就是體積渲染的基本思想。
核心思想:光線積分
體積渲染的本質是:在一條光線上積分所有位置的顏色和不透明度,決定最終的像素顏色。???????
設想我們沿光線采樣許多點,每個點有:
-
顏色值
c_i(RGB) -
密度值
σ_i(表示該點“多不透明”)
每個點的**不透明度(透明度補數)**記作:
![]()
其中 δ_i 是采樣點之間的距離。
透明度混合(Alpha Blending)
每個點對最終像素顏色的貢獻由其前面的透明度控制。這個過程叫做 前向透明度混合(front-to-back alpha compositing)。
假設有 N 個采樣點,每個點顏色為 c_i,不透明度為 α_i,權重(可視度)為 T_i,則最終像素顏色為:
其中:
![]()
意思是:前面所有點“透明”才能看到當前第 i 個點的顏色。
示例類比:多層玻璃窗
我們看向遠方,面前有好幾塊半透明玻璃,每塊玻璃都上了一點顏色。
-
第一塊玻璃影響最多;
-
第二塊玻璃的顏色只有在第一塊足夠透明時才能顯現;
-
第三塊玻璃受到前兩塊的遮擋;
-
最終我們看到的顏色,是所有玻璃“混合”的結果。
在 Gaussian Splatting 中的作用
在 Gaussian Splatting 中:
-
每個高斯就像一個有顏色和透明度的模糊斑點;
-
從一個視角出發,對所有高斯進行深度排序;
-
按順序進行透明度混合,疊加顏色;
-
得到最終像素顏色,就像體積渲染中的“光線積分”。
但與 NeRF 不同,Gaussian Splatting 是一種點級別的近似快速渲染,不是連續空間積分,而是基于稀疏高斯點進行快速 alpha 混合。
7.NeRF 原理簡介:神經體積渲染的基準模型(可與 Gaussian Splatting 對比)
什么是 NeRF?
NeRF(Neural Radiance Fields) 是 2020 年由 Google 提出的新型 3D 表示方法,它使用一個神經網絡來擬合一個場景的體積顏色與密度函數,然后利用體積渲染技術合成新視角圖像。
NeRF 是 Gaussian Splatting 出現之前最廣泛使用的三維重建方案之一。
NeRF 的核心思想
NeRF 的核心是一個函數:![]()
-
𝑥 ∈ ?3:表示空間中的一個 3D 點 -
𝑑 ∈ ?3:表示相機視角方向(單位向量) -
輸出
c ∈ ?3:該點在該方向下的 RGB 顏色 -
輸出
σ ∈ ??:體積密度(用來計算透明度)
也就是說,NeRF 使用一個 MLP 神經網絡來表示場景的顏色和體積結構。
渲染方式:體積渲染積分(Volume Rendering)
NeRF 沿著每個像素的視線進行采樣,使用神經網絡預測每個采樣點的顏色和密度,然后通過**體積渲染(參考上一節)**混合得到最終顏色。
NeRF 每條光線都要采樣幾十到上百個點,并且每個點都要前向一次神經網絡 → 渲染非常慢(分鐘級)。
優點與缺點
| 優點 | 缺點 |
|---|---|
| 表示能力強:細節豐富、精度高 | 訓練和渲染都非常慢 |
| 能表示連續空間(非點云) | 不可實時互動 |
| 適合離線精渲染任務 | 不適合實時應用、游戲等 |
Gaussian Splatting 與 NeRF 的對比
| 項目 | NeRF | Gaussian Splatting |
|---|---|---|
| 表示形式 | MLP(神經網絡) | 高斯點分布 |
| 渲染方式 | 連續采樣 + 體積渲染 | 離散高斯疊加 |
| 渲染速度 | 慢(需推理 MLP) | 快(GPU 可并行) |
| 實時性 | 不支持 | 支持實時渲染 |
| 內存占用 | 相對較小 | 高斯點云較大 |
| 場景表達能力 | 精度高,細節豐富 | 精度略低,但效率高 |
NeRF 與 Gaussian 的演進路徑
NeRF 系列發展出了很多變種(FastNeRF、InstantNGP、MipNeRF、Zip-NeRF),目的都是為了加速渲染、減少訓練時間。而 Gaussian Splatting 是直接跳出神經網絡,將渲染過程“顯式化”為可快速繪制的高斯點云,成為一種新范式。
NeRF 是“隱式渲染”(用網絡預測顏色+密度),而 Gaussian Splatting 是“顯式渲染”(直接用可見的高斯點+數學公式渲染),這就是“渲染過程顯式化”的意思。
Gaussian Splatting 的“顯式渲染”機制:
Gaussian Splatting 不再使用黑盒函數表示場景,而是直接生成一堆可見的、有意義的點:
每個點(3D Gaussian)具有:
-
位置(在世界坐標中)
-
顏色(RGB)
-
透明度(α)
-
空間尺度(決定模糊大小)
-
方向(協方差矩陣)
-
屏幕上的外形(經過投影變換)
渲染時:
? 不再用神經網絡!直接把這些高斯點投影到屏幕 → 進行 α 混合 → 生成圖像。
這一過程完全顯式、可計算、可并行、可加速,非常適合 GPU 實時處理。
總結
| 特性 | NeRF(隱式) | Gaussian Splatting(顯式) |
|---|---|---|
| 表達方式 | 神經網絡 MLP(函數) | 高斯點(真實幾何+屬性) |
| 渲染方式 | 推理+體積渲染 | 投影+α混合 |
| 每次渲染都需要? | 網絡推理幾十次 | 點→像素變換+混合即可 |
| 渲染速度 | 慢(秒級) | 快(實時) |
| 可視化 | 不可直接看場景結構 | 點云可視化直接看到場景形狀 |
8.Gaussian Splatting 的核心思想
核心一句話:
Gaussian Splatting 是一種用“3D 高斯點云”來實時渲染場景的技術,核心思想是:把一個 3D 世界顯式表示成許多透明的、有顏色的模糊斑點,然后投影到屏幕上進行混合,生成最終圖像。
1?? 從點云到高斯
我們知道,傳統的三維重建(如激光掃描)會得到“點云”,每個點有位置和顏色。但這些點是“離散的”,看起來會有鋸齒、空洞。
于是,Gaussian Splatting 提出:
🔵 把每個點變成一個 3D 高斯分布,也就是一個模糊的、橢球形的斑點。它有:
位置(在哪兒)
形狀(橢球大小方向)
顏色(RGB)
不透明度(α)
這讓原本“零散的點”變成了“柔和的、連續的體積”,更像真實世界。
2?? 把高斯“潑”到屏幕上
“Splatting” 是圖形學里的術語,意思是“把點在屏幕上鋪開/投影出去”。
Gaussian Splatting 的做法是:
📷 把每個 3D 高斯點 根據相機視角投影到屏幕上,變成一個 2D 的橢圓模糊圖形。
這個過程考慮了:
-
相機位置(從哪看)
-
高斯的方向和大小(變換后是屏幕上的橢圓)
3?? 使用透明度混合生成圖像
多個高斯點可能會投影到同一個像素位置。
🧪 所以我們要像 Photoshop 那樣,“一層層疊加”,用 alpha 混合公式,得到最終顏色。
疊加規則是:
-
離相機近的點要先渲染;
-
每個點的透明度決定它對最終顏色的貢獻;
-
像體積渲染那樣累加顏色,越后面的點貢獻越小(被遮擋)。
? 為什么這很聰明?
相比 NeRF,它的優點是:
| 特點 | Gaussian Splatting | NeRF |
|---|---|---|
| 場景表示 | 顯式高斯點云 | 黑盒神經網絡 |
| 渲染方式 | 投影+透明度混合 | 光線采樣+MLP推理 |
| 渲染速度 | 快,可實時 | 慢,需要推理 |
| 顯存占用 | 稍大(保存高斯) | 相對較小 |
| 可解釋性 | 點是明確可見的 | 不可視,需要解碼 |
Gaussian Splatting 是一種將 3D 場景顯式表示為高斯點的技術,使用快速投影和透明度混合代替傳統 NeRF 的光線采樣與 MLP 推理,顯著提升了渲染速度并支持實時交互。
9.GS點的參數
在 3D Gaussian Splatting 中,一個點不是簡單的“位置 + 顏色”,而是帶有空間分布、方向、透明度等信息的可渲染斑點。它的參數大致可以分為三類:
🧩 第一類:幾何信息(Geometry)
1?? 位置 μ ∈ ?3
-
這是高斯分布的中心點,定義了這個點在 3D 空間中的位置。
-
就像傳統點云里的一個點的位置。
📌 舉例:一個點在 [1.0, 2.0, 3.0] 的位置,它就“漂浮”在這個空間中。
2?? 協方差矩陣 Σ ∈ ?3?3(或者參數化形式)
-
控制這個高斯的形狀和朝向,相當于定義了一個橢球體的大小和方向。
-
可以理解為這個點“在空間中模糊到哪里去”,是細小點還是大斑塊。
📌 比如:
-
如果協方差小,那就是一個“尖的點”;
-
如果協方差大,那就是一個“模糊的大點”。
📍 實際論文中會使用參數矩陣 Λ 代替協方差 Σ,便于訓練(可正定性)。
🎨 第二類:外觀信息(Appearance)
3?? 顏色 c ∈ ?3 或 RGB
-
表示這個點本身的顏色,在渲染時直接作為輸出圖像的一部分。
-
有些版本還會加上顏色不確定度,但基本就是顏色本身。
📌 例:[0.2, 0.5, 0.8] → 藍綠色點。
4?? 不透明度 α 或體積密度 σ
-
控制這個點對最終圖像的貢獻有多大,越大越“實”,越小越“透明”。
-
類似 Photoshop 圖層的不透明度,或者 NeRF 中的體積密度。
📌 透明點對結果貢獻小;不透明點容易遮擋后方點。
🔧 第三類:渲染輔助信息(Rendering Parameters)
5?? 視角依賴性(View-dependent feature)🔁(可選)
-
一些版本中引入了方向特征(如 SH spherical harmonics 球諧函數)來模擬表面反射光效果。
-
這是為了解決:一個點在不同視角看起來顏色不一樣的問題(比如鏡面反射)。
📌 這部分在論文中可選開啟,核心思想是使高斯點在不同角度下顯示不同顏色。
6?? 混合優先級 / 深度排序(用于渲染排序)
-
高斯點需要根據到相機的距離來排序,靠近的先渲染。
-
雖不是“參數”,但每幀渲染前需要用這個信息進行排序,以正確合成透明度。
🧠 總結表格:一個點的關鍵參數
| 類別 | 參數 | 描述 | 作用 |
|---|---|---|---|
| 幾何 | μ | 空間位置 | 決定點在哪里 |
| 幾何 | Σ 或 Λ | 空間形狀協方差 | 控制模糊方向和大小 |
| 外觀 | c | 顏色 | 決定渲染顏色 |
| 外觀 | α | 不透明度 | 控制遮擋和貢獻 |
| 渲染 | SH特征(可選) | 視角依賴色 | 表面高光反射等特效 |
| 渲染 | 深度距離 | 相機距離 | 控制前后遮擋順序 |
10.自適應密度控制
① 通俗比喻:撒網捕魚
想象你在海上捕魚,但魚的分布不均勻:
- 普通方法:你不管三七二十一,在整個海面均勻撒網(就像均勻采樣)。結果魚多的地方網不夠密,漏掉很多;魚少的地方網太密,浪費力氣。
- 自適應方法:你聰明了,先快速試探幾網,發現魚群集中在某幾個區域。然后你調整策略——在魚多的地方多撒網(高密度采樣),魚少的地方少撒網(低密度采樣)。這樣既省力,又捕得多。
這就是自適應密度控制的核心思想:根據目標的重要性動態調整采樣密度!
②在光線積分中的應用
在渲染(比如路徑追蹤)中,我們需要計算光線在場景中的積分(比如光照效果)。但不同區域的光線貢獻差異巨大:
- 高貢獻區域:比如明亮的光源、銳利的陰影邊緣、復雜的反射區域(需要更多采樣)。
- 低貢獻區域:比如黑暗的角落、平滑的漫反射表面(需要較少采樣)。
自適應密度控制會自動識別這些區域,并分配不同的采樣密度:
- 先粗采樣:快速用少量光線試探整個場景,找出哪些地方對最終畫面影響大(比如高光或陰影邊界)。
- 再精調:對重要區域發射更多光線(提高采樣密度),不重要區域減少光線(節省計算資源)。
- 動態調整:隨著渲染進行,持續優化采樣分布(類似“邊觀察邊調整撒網位置”)。
③為什么需要它?
- 省時間:避免在無關區域浪費計算資源。
- 降噪聲:在復雜光照區域(比如焦散、鏡面反射)增加采樣,減少畫面噪點。
- 自適應性強:適合各種復雜場景,無需人工預設采樣規則。
④舉個渲染例子
假設渲染一個室內場景:
- 窗戶附近:陽光直射+玻璃反射,光線變化劇烈 → 自適應算法會分配更多采樣。
- 陰暗墻角:光線簡單且微弱 → 減少采樣。
- 最終效果:畫面噪點少,且計算速度更快!
總結
自適應密度控制就像“智能撒網捕魚”:先探路:快速找出重要區域。再聚焦:對關鍵區域集中火力。動態調整:隨時優化效率。在光線積分中,它讓渲染器更聰明地分配計算資源,用最少的光線達到最好的畫面質量。














App Input事件接收器InputEventReceiver)

)
)

