工業相機的芯片CRA角度與鏡頭選型的匹配關系
- Baumer工業相機
- ?工業相機的芯片CRA角度的技術背景
- ?工業相機的芯片CRA的信息
- CRA相差過大的具體表現
- 怎樣選擇工業相機sensor的CRA
- Baumer工業相機sensor的CRA
- 工業相機的芯片CRA角度與鏡頭匹配好的優點
Baumer工業相機
工業相機是常用與工業視覺領域的常用專業視覺核心部件,擁有多種屬性,是機器視覺系統中的核心部件,具有不可替代的重要功能。
工業相機已經被廣泛應用于工業生產線在線檢測、智能交通,機器視覺,科研,軍事科學,航天航空等眾多領域
工業相機的主要參數包括:分辨率、幀率、像素、像元尺寸、光譜響應特性等,本文主要介紹工業相機的芯片CRA角度與鏡頭選型的匹配關系
Baumer工業相機堡盟相機是一種高性能、高質量的工業相機,可用于各種應用場景,如物體檢測、計數和識別、運動分析和圖像處理。
Baumer的萬兆網相機擁有出色的圖像處理性能,可以實時傳輸高分辨率圖像。此外,該相機還具有快速數據傳輸、低功耗、易于集成以及高度可擴展性等特點。
?
?工業相機的芯片CRA角度的技術背景
晶圓
晶圓Wafer,是指制作半導體電路所用的硅晶片,其原始材料是硅。高純度的多晶硅溶解后摻入硅晶體晶種,然后慢慢拉出,形成圓柱形的單晶硅。硅晶棒在經過研磨,拋光,切片后,形成硅晶圓片,也就是晶圓。以8英寸和12英寸為主。
拜爾濾色鏡
這種濾色器的排列是50%是綠色,25%是紅色,25%是藍色,因此也被稱為RGBG
拜耳陣列的問題之一是,在拍攝具有重復細節的畫面時,容易產生彩色干擾信息。該問題是由于其規則的分布方式而造成的。其具體表現為畫面中產生難看的色帶,而解決該問題的方法是傳感器前安裝一塊會將畫面細節模糊化的AA濾鏡。低通濾鏡可以減弱摩爾紋,但同時也降低了相機分辨率。
由于傳感器的像素只能區分接收到光線的強弱,無法分辨色彩。因此為了重建色彩信息,需要在每個像素上涂敷不同色彩的濾鏡。不同的像素感應不同的色彩,還原色彩。
CMOS芯片
CMOS本是計算機系統內一種重要的半導體,保存了系統引導最基本的資料。CMOS的制造技術和一般計算機芯片沒什么差別,主要是利用硅和鍺這兩種元素所做成的半導體,使其在CMOS上共存著帶N和P級的半導體。這兩個互補效應所產生的電流即可被處理芯片記錄和解讀成影像。后來發現CMOS經過加工也可以作為數碼攝影中的圖像傳感器,CMOS傳感器也可細分為被動式像素傳感器和主動式傳感器。
人們如此看好CMOS圖像轉換器的成長前景是基于這樣一個事實,即:與壟斷該領域長達30多年的CCD技術相比,它能夠更好地滿足用戶對各種應用中新型圖像傳感器不斷提升的品質要求,如更加靈活的圖像捕獲、更高的靈敏度、更寬的動態范圍、更高的分辨率、更低的功耗以及更加優良的系統集成等。
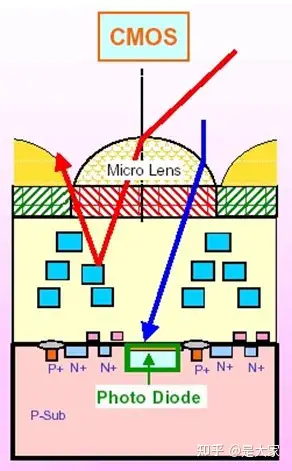
CMOS(complementary metal-oxide-semiconductor:互補金屬氧化物半導體)芯片由微透鏡層、濾色片層、線路層、感光元件層、基板層組成。
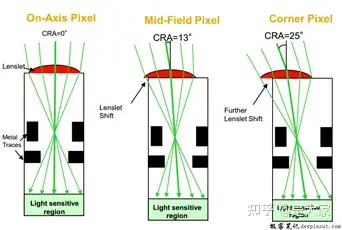
由于光線進入各個單像素的角度不同,因此在每個單像素上表面增加了一個微透鏡修正光線角度,使光線垂直進入感光元件表面。這就是芯片CRA的概念,需要與鏡頭的CRA保持在一點的偏差范圍內。
CRA(chief ray angle)主光線角度
Lens CRA 就是最大像高處的主光線與光軸的傾角;
Sensor CRA ,也就是SENSOR 的MICRO LENS 與光電二極管的位置存在一個水平誤差,并不在一條直線上(這個偏差角就是sensor的CRA)。做成這樣的目的,這樣的做的目的也是為了好搭配LENS 。
在相機鏡頭光學特性參數設定中,由于光線進入各個單像素的角度不一樣,因此在每個單像素上表面增加了一個微透鏡修正光線角度,使光線垂直進入感光元件表面,這就是芯片CRA的概念,它需要與鏡頭的CRA保持在一點的偏差范圍內。
通常來講,Sensor的效能與Sensor本身的靈敏度和光線入射的角度有關。而光線入射到Sensorpixel的角度是由Lens的CRA和Sensor的Micro Lens開口布局(Sensor的CRA)共同決定的。
從鏡頭的傳感器一側,可以聚焦到像素上的光線的最大角度被定義為一個參數,稱為主光角(CRA)。對于主光角的一般性定義是:此角度處的像素響應降低為零度角像素響應的80%。
通常來講,sensor的效能與sensor本身的靈敏度和光線入射的角度有關。而光線入射到sensor pixel的角度由lens的CRA和sensor的micro lens開口布局共同決定的。
從鏡頭的傳感器一側,可以聚焦到像素上的光線的最大角度被定義為一個參數,稱為主光角(CRA),一般性定義是:此角度處的像素響度降低為零度角像素響應的80%。
CRA主光角測試的重要性:
按通常的做法,因為SENSOR的Micro Lens與光電二極管之間存在一定的距離,這樣做的目的也是為了方便搭配Lens。此外,lens存在一個CRA值,這在Lens設計的時候就要考慮的內容,根據sensor的CRA值進行設計,一般建議sensor與lens的CRA角度差控制在正負2~3度以內,并不是Lens的CRA值越小越好,而是與sensor的CRA值越近越好。
什么是sensor的CRA
Sensor有一個CRA值,也就是sensor的micro lens與光電二極管的位置存在一個水平誤差,并不在一條直線上,做成這樣有一定的目的,按通常的做法,因為sensor的micro lens與光電二極管之間存在一定的距離,這樣做的目的也是為了好搭配lens。因為CRA為0度的lens還是不好找的。
普通的FSI的sensor都有一個類似光子井的結構來用來收集光子:
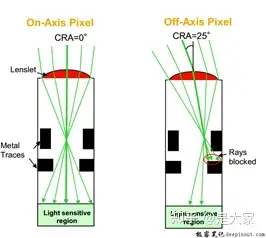
當CRA增加的時候,光線會被金屬電路層阻擋掉一部分,導致sensor接受光的效能降低。
那么:
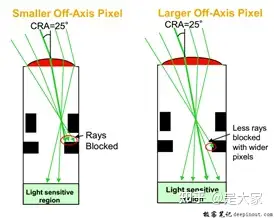
1、pixel越大,這種影響會越小:
2、對于BSI的sensor,這種影響也會更小
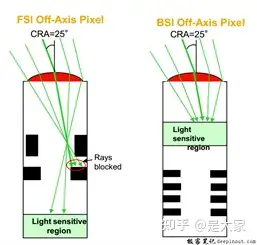
因此對于FSI的sensor來說,通常會通過移動sensor表面的micro lens來收集更多的光線:
?工業相機的芯片CRA的信息
CRA(Chief Ray Angel)
Lens CRA 就是最大像高處的主光線與光軸的傾角;
Sensor CRA ,也就是SENSOR 的MICRO LENS 與光電二極管的位置存在一個水平誤差,并不在一條直線上(這個偏差角就是sensor的CRA)。做成這樣的目的,這樣的做的目的也是為了好搭配LENS 。
在相機鏡頭光學特性參數設定中,由于光線進入各個單像素的角度不一樣,因此在每個單像素上表面增加了一個微透鏡修正光線角度,使光線垂直進入感光元件表面,這就是芯片CRA的概念,它需要與鏡頭的CRA保持在一點的偏差范圍內。
通常來講,Sensor的效能與Sensor本身的靈敏度和光線入射的角度有關。而光線入射到Sensorpixel的角度是由Lens的CRA和Sensor的Micro Lens開口布局(Sensor的CRA)共同決定的。
從鏡頭的傳感器一側,可以聚焦到像素上的光線的最大角度被定義為一個參數,稱為主光角(CRA)。對于主光角的一般性定義是:此角度處的像素響應降低為零度角像素響應的80%。
CRA Matching
在光學系統中,sensor上的光學接收效率不僅與CRA有關,還與Sensor的Micro lens開口布局有關。因此在做Lens涉及時,CRA要盡量符合Sensor廠家提供的CRA參考值,提高功能接收效率。
通常Lens CRA要小于sensor的CRA,允許有3°以內的偏差。這是因為:
鏡頭CRA太過小于Sensor的CRA時,會出現四角偏暗(受光不足),光線無法到達sensor邊緣,即Lens Shading;
鏡頭CRA太過大于Sensor的CRA時,光線會折射到臨近的pixel上,導致pixel間出現串擾,即Color shading,且在圖像四周表現更明顯;
建議優先保證Color Shading, 因為Lens Shading比Color Shading容易調試;
并不是LENS CRA 越小越好,有人認為0度是最佳的,那也是不對的,只能說與SENSOR 的CRA 越接近越好。
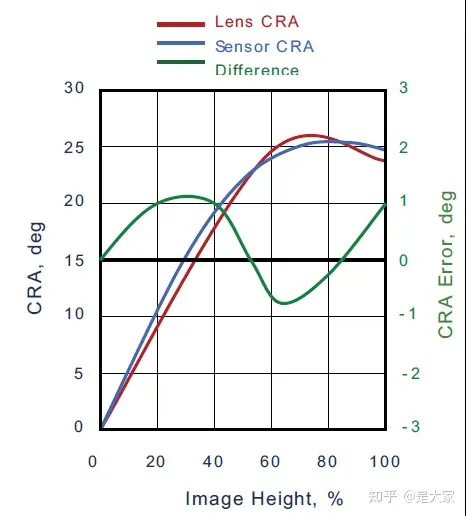
鏡頭CRA和傳感器CRA不匹配的影響:
不匹配導致整個圖像的顏色不平衡產生串擾,從而導致信噪比(SNR)的降低;因為CCM需要增加數字增益來補償光電二極管中的信號損失。
像高(Image Height)的最大值是對角線長度
因為鏡頭是圓的,畫面的對角線是最接近鏡頭成像直徑的,所以最大尺寸是對角線尺寸。
CRA與像高的關系(摘自OV某款sensor規格書):

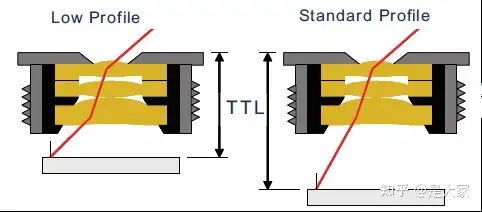
從上圖可以看出鏡頭的TTL也是決定CRA角度的關鍵,TTL越低CRA的角度就越大,所以小像素的Image sensor對于相機系統設計時的鏡頭CRA匹配也至關重要。
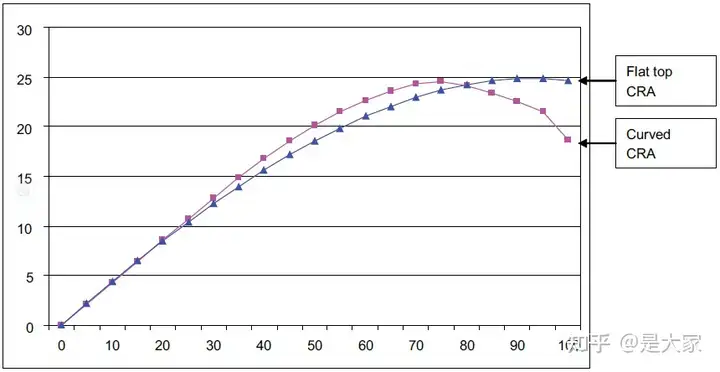
通常,出于各種原因,鏡頭CRA與Image sensor CRA并不完全匹配。 實驗上已經觀察到,與彎曲的CRA相比,具有平坦頂部(最小翻轉)的鏡頭CRA曲線更能容忍相機模塊的裝配變化。
如下圖顯示平頂和彎曲CRA的示例。
-
當Pixel的尺寸越來越小時,即分辨率越高, 邊緣的Pixel越容易受到影響;
-
當CCM的尺寸越來越小時,即Lens的距離變短,CRA的角度影響變大。
鏡頭CRA與芯片不匹配可能會產生的影響:
-
不能確保可以準確的捕獲光子到硅光電二極管中;
-
會導致信噪比(SNR)的降低 (顏色不平衡產生干擾);
-
圖像不清、有霧、反差度低、顏色變淡、景深變小。
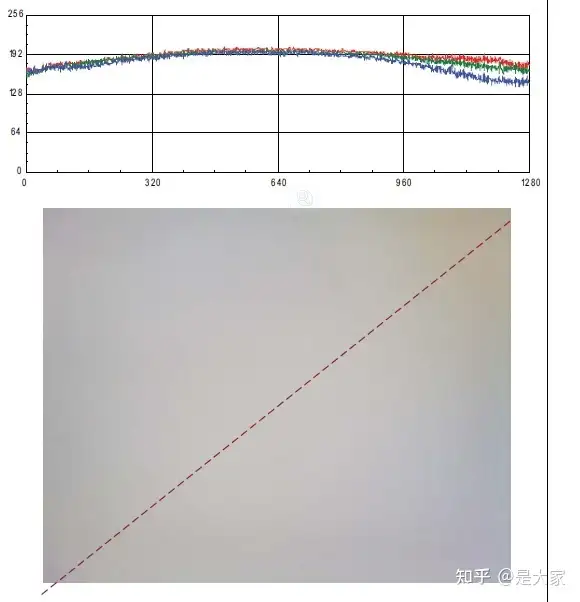
CRA相差過大的具體表現
鏡頭的CRA與Image sensor的CRA相差過大會出現如下圖偏色。
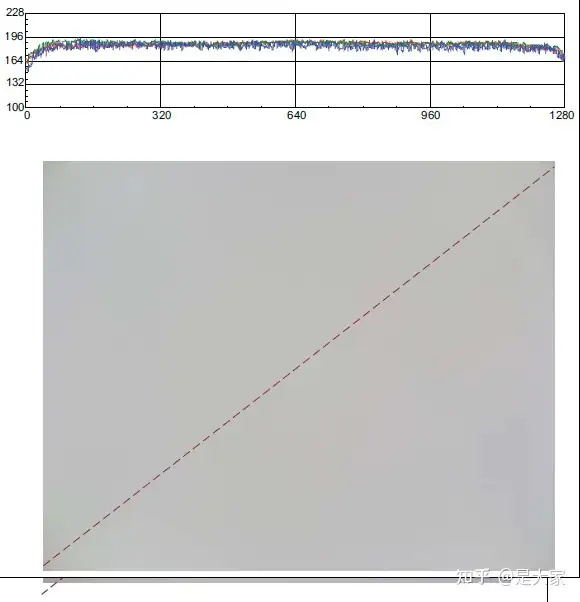
鏡頭的CRA與Image sensor的CRA匹配則圖像正常,如下圖:
怎樣選擇工業相機sensor的CRA
-
廣角鏡頭:這時一般lens的CRA比較大,需要選擇CRA大于25度的sensor或者BSI的Sensor;一般用于手機、安防、玩具、網絡攝像頭等;
-
超長焦鏡頭:這時一般lens的CRA比較小,需要選擇CRA為0度的sensor;一般用于安防、機器視覺等。
-
變焦鏡頭:這時Lens的CRA是變化的,一般需要根據實際應用選擇,最好采用大Pixel,BSI的sensor;一般用于安防等。
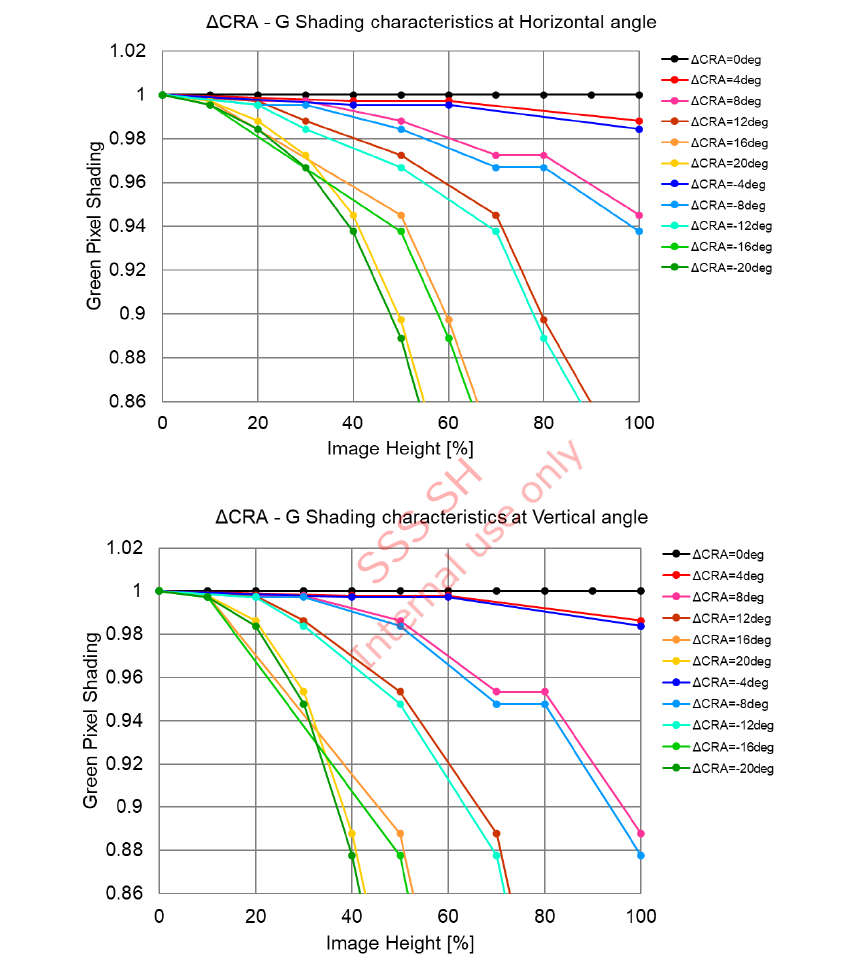
Baumer工業相機sensor的CRA
如下為VCXG.2-82M對應芯片的CRA相關數據,
ΔCRA指的是鏡頭和sensor的CRA差值。
pixel shading是不同視場的亮度/中心亮度的比值。
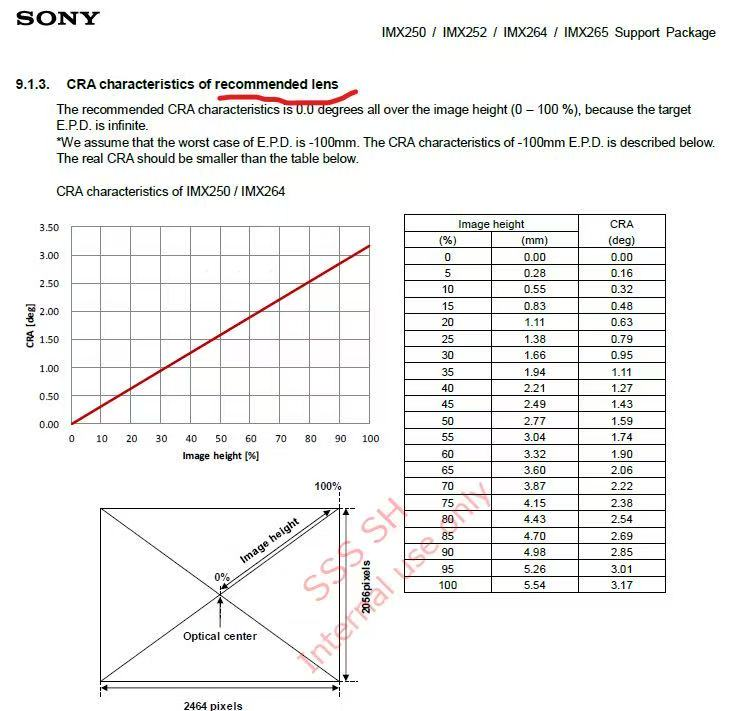
下圖是sony芯片IMX2系列有關于CRA的鏡頭匹配說明:
工業相機的芯片CRA角度與鏡頭匹配好的優點
工業相機的芯片CRA(Chief Ray Angle,主光線角度)與鏡頭匹配好具有以下優點:
- 提高成像質量
- 避免光線損失:當芯片CRA與鏡頭匹配良好時,鏡頭出射的主光線能夠以合適的角度入射到芯片上,最大限度地減少光線在芯片表面的反射和折射損失,從而提高圖像的整體亮度和對比度,使拍攝的圖像更加清晰、鮮明。
- 減少色差:匹配良好的CRA可以使不同波長的光線在芯片上的成像位置更加準確,減少因光線角度偏差導致的色差現象,即避免彩色圖像中出現顏色邊緣或色彩失真的情況,提高圖像的色彩還原度。
- 改善分辨率:合適的CRA角度能確保光線準確地聚焦在芯片的感光單元上,使圖像的細節得到更好的保留,從而提高圖像的分辨率,有助于清晰地分辨出物體的細微特征和結構。
- 優化圖像均勻性
- 避免暗角現象:如果鏡頭與芯片的CRA不匹配,可能會導致光線在芯片邊緣部分的入射角過大,使得邊緣部分的光線收集效率低于中心部分,從而產生暗角現象。而良好的CRA匹配可以使光線均勻地分布在芯片上,避免出現圖像邊緣過暗或不均勻的情況,保證整個圖像的亮度均勻性。
- 減少色彩偏差:除了亮度均勻性,CRA匹配良好還有助于保持色彩的均勻性。在不同區域,光線入射角的一致性可以避免因光線角度差異導致的色彩感知差異,確保圖像在整個視場內的色彩一致性和準確性。
- 增強系統穩定性
- 提高測量精度:在工業檢測等應用中,需要對物體進行精確的測量和分析。芯片CRA與鏡頭的良好匹配可以保證成像的穩定性和準確性,從而提高測量精度,減少因成像質量不穩定導致的測量誤差,為工業生產中的質量控制和檢測提供可靠的數據支持。
- 降低系統對環境的敏感性:匹配良好的CRA可以使工業相機系統在不同的環境條件下(如不同的光照強度、角度等)保持相對穩定的成像性能。這意味著系統對環境變化的適應性更強,能夠在更廣泛的工作條件下正常運行,減少因環境因素導致的圖像質量下降或系統故障的可能性。
)



Day6-Python3 正則表達式)









:概率分布差異的量化利器)




