這篇論文主要探討了基于深度學習的滑坡位移預測模型,結合了MT-InSAR(多時相合成孔徑雷達干涉測量)觀測數據,提出了一種具有可解釋性的滑坡位移預測方法。
[1] Zhou C, Ye M, Xia Z, et al. An interpretable attention-based deep learning method for landslide prediction based on multi-temporal InSAR time series: a case study of xinpu landslide in the TGRA[J]. Remote Sensing of Environment, 2025, 318: 114580.
期刊
Remote Sensing of Environment
作者:
Chao Zhoua,b,Mingyuan Yea,Zhuge Xiac,b,*,Wandi Wangb,Chunbo Luod,Jan-Peter Mullere
第一作者
Chao Zhou(R)
作者單位:
a 中國地質大學(武漢),地理與信息工程學院,武漢 430078,中國
b 德國地學研究中心(GFZ),遙感與地理信息科學部,特雷格拉芬貝格,波茨坦 14473,德國
c 河海大學,地球科學與工程學院,南京 211100,中國
d 英國埃克塞特大學,計算機科學系,埃克塞特 EX4 4QF,英國
e 英國倫敦大學學院(UCL),馬拉德空間科學實驗室,空間與氣候物理系,霍爾姆伯里圣瑪麗,薩里 RH5 6NT,英國
-
問題背景與目標:滑坡作為一種常見的地質災害,其位移預測對于災害預警和防治至關重要。傳統的滑坡位移預測方法存在一定的局限性,特別是在處理復雜的非線性和非平穩數據時。本文旨在通過深度學習方法提高滑坡位移預測的準確性,并增強模型的可解釋性。
-
模型方法:
- 論文提出了一種耦合的CNN-Attention-BiGRU模型。CNN(卷積神經網絡)用于從多維度數據中提取特征,Attention機制則增強了時間特征的提取能力,BiGRU(雙向門控循環單元)則利用歷史信息來提高滑坡位移預測的準確性。
- CNN-Attention機制幫助模型更好地關注重要的時序特征,增強了對關鍵觸發因素的響應能力。
- VMD(變分模態分解)被用于時序分解,幫助有效分離趨勢項和季節性成分,進而提高預測精度。
-
實驗與結果:
- 通過在新浦滑坡區域進行實驗,論文展示了該模型在不同監測點上的預測效果,并與傳統的CNN-BiGRU、BiGRU和BiLSTM等模型進行了比較。
- 結果表明,所提模型在滑坡位移預測方面表現優異,尤其在大幅度位移變化的時期,預測精度顯著提高。
-
可解釋性分析:
- 通過CNN-Attention模型,論文揭示了降水量和RWL(水位變化)等因素在不同時間段對滑坡變形的影響,特別是在滑坡快速運動的時期。注意力機制幫助模型關注歷史觸發因素對當前位移的影響,從而提高了模型的可解釋性。
- 論文還通過熱圖展示了不同時間戳的特征權重,分析了這些因素在預測中的相對重要性。
-
結論:
- 本文提出的CNN-Attention-BiGRU模型能夠有效提高滑坡位移的預測精度,同時通過可解釋性分析,增強了模型的透明度,能夠揭示滑坡變形與環境因素(如降水量和水位變化)之間的動態關系。
- 該方法在多學科災害風險減緩中具有廣泛的應用潛力,尤其適用于地質災害預測和預警系統。
總的來說,本文的貢獻在于結合深度學習和MT-InSAR數據,提出了一種高效且可解釋的滑坡位移預測模型,為地質災害的早期預警和風險評估提供了新的思路和方法。
【論文閱讀20】-CNN-Attention-BiGRU-滑坡預測
- **摘要**
- **1. 引言**
- **2. 研究區**
- **3. 方法**
- **3.1 InSAR 數據處理**
- **3.2 位移時間序列分解**
- **3.3 基于注意力機制的深度學習建模**
- **3.3.1 趨勢項預測**
- **3.3.2 季節項預測**
- **3.4 精度評價與對比**
- 4. 結果分析
- 4.1 MT-InSAR 形變與環境配置
- 4.1.1 邊坡不穩定性與誘發因素
- 4.1.2 多個水文年的形變對比
- 4.1.3 單一水文年(2017 年)內的統計比較
- 4.1.4 滑坡運動驗證與分類
- **4.2 滑坡變形預測**
- **4.2.1 位移時間序列的分解**
- 4.2.2 趨勢與季節性分量預測
- 4.2.3 滑坡位移時間序列的組成
- 4.2.4 我們方法的魯棒性評估
- 5. 討論
- 5.1 地質特性與觸發因素
- 5.2 基于機器學習的變形預測
- 5.3 CNN-Attention模型特征權重的特點
- 6. 結論
全文翻譯
摘要
滑坡變形的預測對于預警系統至關重要。傳統的巖土原位監測由于高成本和在大范圍區域內的空間限制,其應用受到了制約。近年來,結合遙感數據的深度學習方法在滑坡預測研究中日益普遍,但這類方法往往存在“黑箱”問題。
為解決這一問題,本文提出了一種結合注意力機制和多時相干涉合成孔徑雷達(MT-InSAR)技術的可解釋深度學習滑坡位移預測框架。首先,利用Copernicus Sentinel-1 SAR影像,通過MT-InSAR提取滑坡的位移時間序列。隨后,采用變分模態分解(VMD) 將非線性位移時間序列分解為趨勢項、季節項和噪聲項。針對趨勢項和季節項,分別使用自回歸積分滑動平均模型(ARIMA) 與雙向門控循環單元(BiGRU) 進行預測;預測輸入則通過分析滑坡影響因子確定。
本研究以中國三峽庫區的新鋪滑坡為例,驗證并評估所提出方法的有效性,并與現有模型進行了對比。結果表明,CNN-Attention-BiGRU算法能夠有效捕捉滑坡變形與其誘因之間的非線性關系,其預測精度優于傳統深度學習模型(如BiLSTM、BiGRU和CNN-BiGRU),均方根誤差(RMSE)提升21%—55%,平均絕對誤差(MAE)提升23%—56%。
通過引入注意力機制的深度學習方法,本文在建模中考慮了滑坡變形的內在機制,并發現關鍵預測因子的相對重要性在每年4月至8月最為顯著,從而實現了對大型庫區滑坡動力學的更高效、更精準預測。
文章信息
編輯:Jing M. Chen
關鍵詞:衛星遙感、滑坡位移預測、注意力機制、CNN-Attention-BiGRU、可解釋深度學習
1. 引言
引出話題
滑坡是全球最嚴重的地質災害之一,其發生范圍廣、頻率高、破壞性強(Lacroix 等,2020;Highland 和 Bobrowsky,2008)。由于地質條件復雜,滑坡多發于山地和丘陵地區,且常與強烈的構造活動相關,對生命財產構成嚴重威脅。滑坡位移的監測尤為關鍵,因為它能直接反映出周期性變化及整體變形趨勢,是滑坡預警與風險防控的主要依據(Zhou 等,2022b)。準確預測滑坡位移,有助于提前采取防范措施,有效減輕次生災害,顯著降低人員傷亡和經濟損失。
InSAR優勢
傳統的地面位移監測方法,如水準測量或全球導航衛星系統(GNSS)技術,因其數據點數量有限,只能反映滑坡狀態和運動趨勢。此外,GNSS 監測設備的高人工成本也限制了其在大范圍、多個滑坡體監測中的應用。干涉合成孔徑雷達(InSAR)技術的出現,為滑坡監測帶來了新的機遇。InSAR 具備全天候、全天時、高精度遙感監測地表微小變形的能力(Zhou 等,2024),可實現大范圍、系統性的監測,突破了傳統手段的局限性,大大提升了滑坡運動預測的能力(Xia 等,2023;Bayer 等,2017;Bozzano 等,2011)。
研究現狀
過去的研究多致力于構建不同的統計或物理模型來預測滑坡運動時間序列(Carlà 等,2017)。隨著人工智能技術的發展,機器學習與深度學習方法在處理多變量數據與挖掘隱藏數據關系方面展現出巨大潛力,為提升滑坡位移時間序列預測的精度提供了良好基礎。例如,Carlà 等(2017)使用短期與長期移動平均及指數平滑函數對滑坡失穩進行預測;Zhou 等(2018)將核極限學習機(KELM)應用于趨勢項與季節項的預測,有效提升了樹坪滑坡的動力學模擬能力。
挑戰
然而,預測基于 InSAR 的滑坡時間序列時,位移變化往往受多種因素共同影響,這使得在不丟失信息的前提下管理復雜多變量之間的關系成為一大挑戰(Ma 和 Mei,2024)。因此,越來越多的研究開始將環境誘發因素與運動學特征結合,以提高預測能力(Zhang 等,2024)。Shihabudheen 和 Peethambaran(2017)構建了融合經驗分解、降雨和庫水位影響的極限學習自適應神經模糊推理模型,用于預測三峽庫區白家堡滑坡的位移變化。Han 等(2021)則通過引入滑坡致因因子,提出了基于支持向量機(SVM)的混合機器學習預測模型,用于應對滑坡位移的快速變化。
引出CNN和GRU,以及存在問題
盡管卷積神經網絡(CNN)在提取多變量關系方面表現優異,但往往難以捕捉時間依賴性,導致特征損失(Gasparin 等,2022)。為解決此問題,Zhang 等(2022)采用門控循環單元(GRU)模型對九仙坪滑坡的位移進行預測,成功捕捉了周期變化與變形模式,同時使用自適應動量估計(Adam)優化器緩解了噪聲和梯度稀疏問題。盡管深度學習方法能處理復雜的多變量問題,但由于其內部處理機制難以解釋,常被視為“黑箱”,這也成為其在實際應用中難以普及的原因之一(Von Eschenbach,2021)。
引出Attention
針對上述問題,可引入注意力機制,為不同特征分配不同權重,從而強化時間序列特征提取并提升模型的可解釋性。在地球科學的應用中,注意力機制被廣泛用于提升 CNN、循環神經網絡(RNN)及其與長短期記憶網絡(LSTM)結合方法的可解釋性。例如,Zhang 等(2021b)和 Li 等(2021)分別使用 GRU 和地理加權 LSTM 模型,成功捕捉了影響地表沉降和邊坡失穩的關鍵時空動態,這些動態來自于 InSAR 監測數據。CNN 模型也展現出良好潛力,例如 Ma 等(2020)利用深度卷積神經網絡準確預測 InSAR 時間序列變形,Rouet-Leduc 等(2021)使用卷積自編碼器檢測毫米級地表形變。Lattari 等(2022)提出結合 RNN 和 LSTM 的方法,用于 InSAR 時間序列的變點檢測,在模擬與真實數據中均驗證了其在地震斷層、地面沉降和滑坡監測中的有效性。近期,Zhou 等(2024)將 GRU 與多時相 InSAR(MT-InSAR)數據結合,實現了更高精度的大范圍滑坡預測。
算法存在問題
但 GRU 在處理長序列時可能表現不佳,而 LSTM 的計算復雜度高、難以解釋決策過程,且對訓練數據量有較高需求。因此,迫切需要具備可解釋性的深度學習方法來預測庫區滑坡運動。
本文方法
本研究提出了一種基于注意力機制的深度學習方法用于預測滑坡變形。我們的目標是構建一個能夠提升預測精度與可解釋性的滑坡運動學預測模型。引入通道注意力機制,用于增強滑坡運動學時間序列特征的提取能力;采用能捕捉長序列依賴關系的雙向門控循環單元(BiGRU)模型,便于全面分析歷史信息。
最終我們提出了基于 MT-InSAR 時間序列的 CNN-Attention-BiGRU 滑坡預測方法。以受到降雨和庫水位波動影響顯著的三峽庫區新鋪滑坡為研究對象,本研究構建的預測框架有效融合了 InSAR 監測、深度學習、聚類分析與預測建模技術,提升了滑坡綜合分析與預測能力。實驗證明,所提出的算法能精準捕捉誘因與滑坡運動之間復雜的非線性關系,其預測精度(以 RMSE 和 MAE 衡量)顯著優于傳統模型,如 BiLSTM、BiGRU 和 CNN-BiGRU。
此外,該方法還能深入揭示影響滑坡動力學的環境觸發機制與演變過程。我們相信,該方法對于滑坡災害風險降低具有重要價值,尤其適用于庫區滑坡,并在遙感領域具有廣闊的應用前景。
2. 研究區
新鋪滑坡位于三峽庫區(TGRA)奉節縣新鋪村,地處長江南岸,如圖1所示。該滑坡距離三峽大壩約158公里,是一處典型的水庫浸沒型滑坡(Ye 等,2024)。滑坡整體上部狹窄、下部寬闊,呈現出光滑層中夾有微切層的結構,從平面上看如同扇形展開。其前緣高程為81–85米,而后緣最高點海拔約為810米,前緣最低點為三峽庫區枯水期的水位,兩者間的相對高差超過630米。前緣主要由松散土體構成,長期受到長江水體沖刷,在重力作用下發生了多次滑動事件,形成了多級臺階狀地貌。
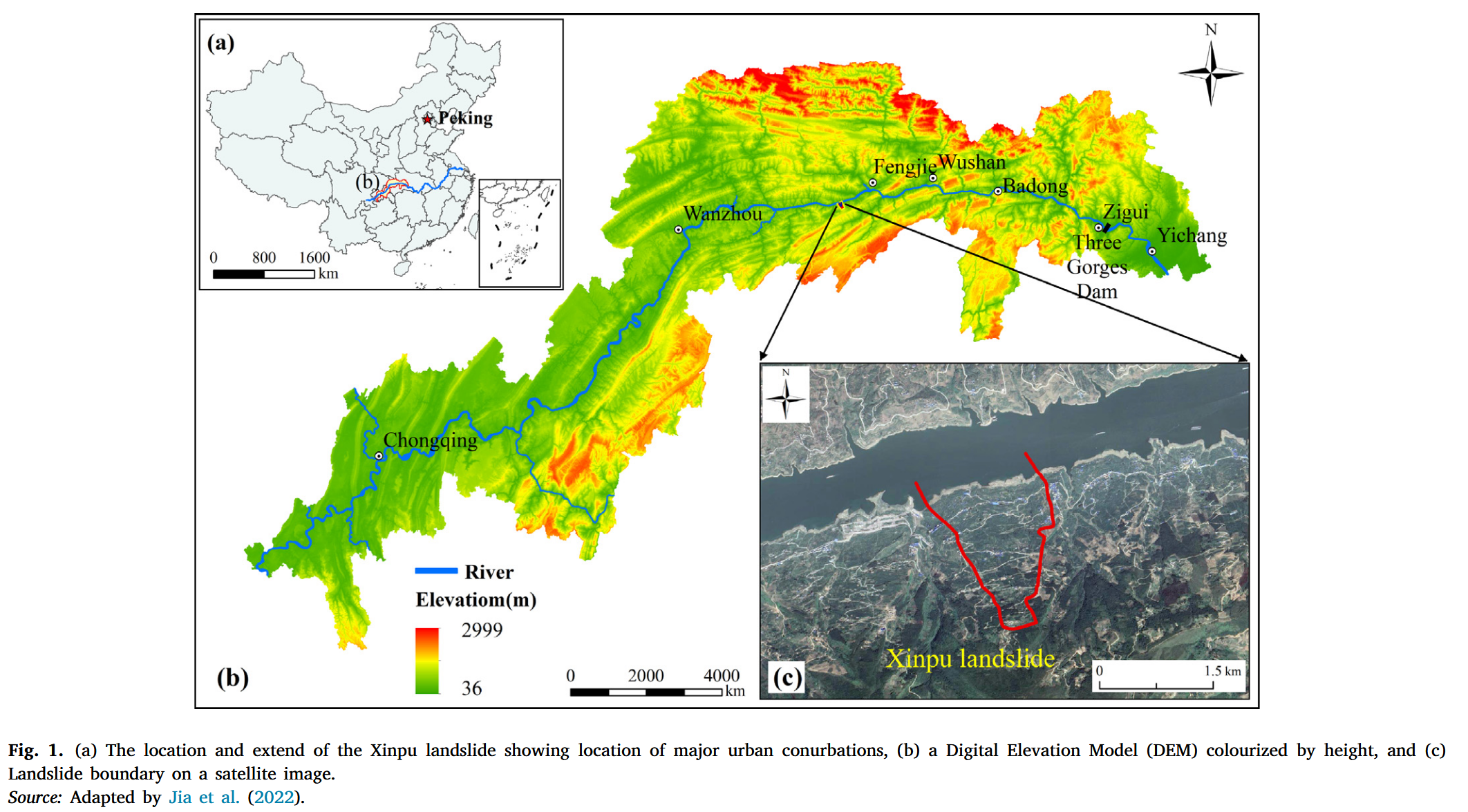
新鋪滑坡體內分布有大量居民住宅,這些建筑已出現墻體開裂、地面沉降、倒塌、滑移和溝道變形等明顯災害跡象(Zheng 等,2023)。滑坡區域地貌以中低山溝谷為主,主要由構造侵蝕和剝蝕作用塑造。地勢整體自南向北下降,從長江岸線逐步下切。區域內山脊多呈東北至東方向展布,長江在枯水期的河面寬度約為1.5公里。該段河谷呈現出明顯的不對稱性:北岸為逆坡,坡度較陡,約為30–50°,溝壑發育;而南岸為順坡,整體坡度為15–20°。滑坡體堆積形成階梯狀斜坡面,溝壑深度為10–20米,坡度與斜坡面基本一致。
3. 方法
圖2展示了所提出的滑坡位移時間序列預測方法的流程圖。該方法基于注意力機制的深度學習方法,采用四個步驟構建滑坡位移預測流程:
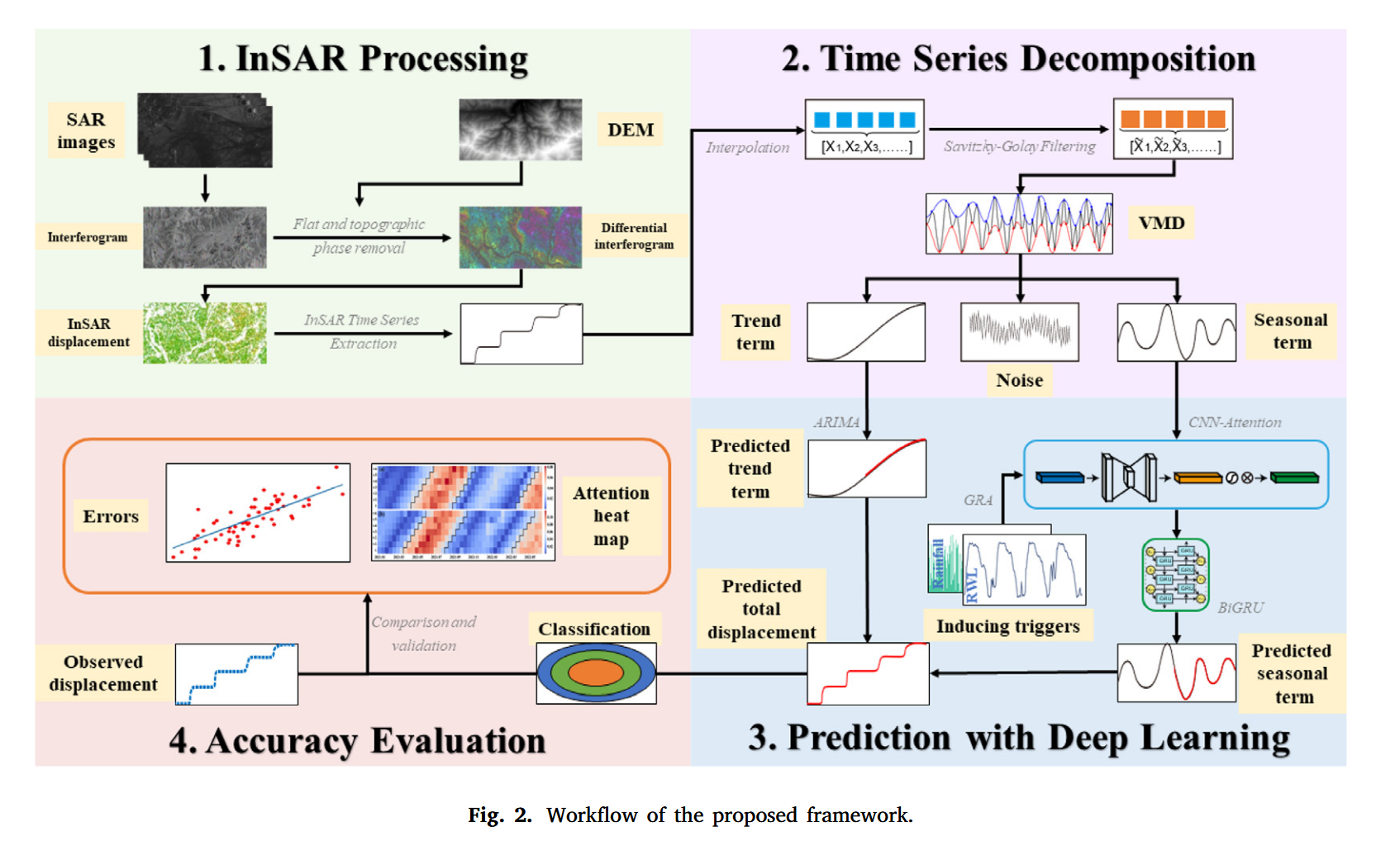
(i)MT-InSAR 數據處理:
首先,針對新鋪滑坡,收集了2016年3月至2022年6月期間的 Sentinel-1 雷達影像數據,進行 MT-InSAR 處理。圖像配準和地形相位去除使用的是分辨率為30米(即一弧秒)的 Copernicus DEM(Bielski 等,2024)。
(ii)時間序列濾波與分解:
然后對 InSAR 獲取的滑坡位移時間序列進行插值和平滑處理,以提取其瞬時變化特征與長期運動趨勢。經過濾波后的時間序列進一步被分解為趨勢項與季節項。
(iii)趨勢與季節項預測建模:
趨勢項采用自回歸滑動平均整合模型(ARIMA)進行預測,而季節項則先與誘發因子序列進行相關性分析,然后使用 CNN-Attention-BiGRU 模型進行預測。為了構建 CNN-Attention-BiGRU 模型,我們收集了三峽庫區每日庫水位(RWL)數據,以及來自新鋪雨量站的降雨數據。誘發因子被劃分為五個序列:12天、24天和36天的累積降雨量;12天的平均庫水位;以及12天平均庫水位的變化量。最終,通過將趨勢項與季節項的預測結果進行疊加重構,得出新鋪滑坡的位移預測值。
(iv)注意力機制解釋分析與模型評估:
最后,我們對 CNN-Attention-BiGRU 模型中獲得的注意力權重層進行分析,從而提升模型的可解釋性與透明度。整個方法流程建立了一種可解釋的滑坡位移預測模型。
此外,為了驗證所提模型的預測準確性,我們采用了均方根誤差(RMSE)、平均絕對誤差(MAE)以及決定系數(R2)作為評價指標。為進一步評估模型性能,我們還與其他三種模型進行了對比分析,包括 BiGRU、BiLSTM 和 CNN-BiGRU 模型。
3.1 InSAR 數據處理
在多時序干涉合成孔徑雷達(MT-InSAR)處理過程中,本研究共使用了168景 C波段 Sentinel-1 衛星圖像,這些圖像均為干涉寬幅(IW)模式,覆蓋時間為2016年3月至2022年6月。Sentinel-1 IW 模式圖像的空間分辨率約為方位向 2.3 2.3 2.3 米、距離向 14.0 14.0 14.0 米。需要注意的是,針對本研究滑坡區域,僅獲取到了升軌影像,因此對沿西北—東南方向的地面變形不敏感。
傳統 InSAR 技術存在兩個主要局限性:首先,它受到去相關效應(decorrelation effects)的影響。InSAR 干涉圖像是兩個配準后的復數 SAR 圖像(包含強度和相位信息)的互相關結果,其在雷達波長尺度上反映了后向散射特征的變化。當 InSAR 相干性下降時,數據質量會受到影響(Jacob 等,2020)。其次,變形監測結果容易受到多種誤差源影響,例如用于地形相位去除的數字高程模型(DEM)精度不足、大氣延遲、軌道誤差、相位解纏錯誤以及其他噪聲來源(Xia 等,2023;Barra 等,2017)。當地表變形幅度較小時,這些噪聲甚至可能完全掩蓋有效信號,導致監測變得異常困難。
MT-InSAR 技術通過引入足量覆蓋同一研究區域的圖像序列,有效克服了傳統 InSAR 的上述限制,從而去除了與變形無關的相位信息。相關處理流程可參考 Fattahi 等(2016)所提出的方法。MT-InSAR 可降低相干性丟失的影響和噪聲相位成分的干擾,即使在植被覆蓋或半植被環境下,也可實現較高的監測精度。
本研究主要采用了小基線集(Small Baseline Subsets,SBAS)方法,并利用分布式散射體(Distributed Scatterers, DS)建立了小空間及時間基線網絡,以減少時間去相關(Anderssohn 等,2009)。DS 被定義為與其鄰域像素具有相似統計特性的像素點。SBAS 處理基于 STAMPS/MT-InSAR 軟件實現(Hooper,2008;Hooper 等,2004),用于獲取新鋪滑坡的位移時間序列。
3.2 位移時間序列分解
為了更好地預測滑坡運動特征,我們將時間序列分解為趨勢項與季節項,從而更準確地表征其長期變化與短期擾動。在對 InSAR 獲取的滑坡位移時間序列進行分解前,必須進行預處理以實現時間軸的均勻化,因為 SAR 圖像獲取存在間隔不均問題,而深度學習模型需要時間上規則分布的數據輸入。
具體地,我們將覆蓋168天的位移序列進行插值處理,形成191個時間節點,等效于 Sentinel-1 的12天重訪周期。當某時刻缺失 SAR 數據時,采用線性插值方法基于前后時刻的數據進行估算,參考 Tomás 等(2016)的方法。
滑坡的累計位移序列可表示為:
C ( t ) = T ( t ) + P ( t ) (1) C(t) = T(t) + P(t) \tag{1} C(t)=T(t)+P(t)(1)
其中, C ( t ) C(t) C(t) 為累計位移, T ( t ) T(t) T(t) 為趨勢項,主要受滑坡自身的地質結構影響, P ( t ) P(t) P(t) 為季節項,主要受周期性環境誘發因子(如降雨、水位)影響。
插值完成后,應用 Savitzky-Golay 濾波器對時間序列進行平滑處理,以剔除異常值。該濾波器能夠提升信號平滑度,降低噪聲干擾(Schafer,2011)。其濾波效果受窗口寬度選擇的影響,可適用于多種場景。
之后,我們采用 變分模態分解(Variational Mode Decomposition, VMD) 方法對位移時間序列中的趨勢與季節性成分進行分解。VMD 模型的數學表達如下:
min ? { u k } , { ω k } { ∑ k ∥ ? t [ ( δ ( t ) + j π t ) ? u k ( t ) ] e ? j ω k t ∥ 2 2 } (2) \min_{\{ u_k \}, \{ \omega_k \}} \left\{ \sum_k \left\| \partial_t \left[ \left( \delta(t) + j \frac{\pi}{t} \right) \cdot u_k(t) \right] e^{-j \omega_k t} \right\|_2^2 \right\} \tag{2} {uk?},{ωk?}min?{k∑? ??t?[(δ(t)+jtπ?)?uk?(t)]e?jωk?t ?22?}(2)
u k ( t ) = A k ( t ) cos ? ( ? k ( t ) ) (3) u_k(t) = A_k(t) \cos(\phi_k(t)) \tag{3} uk?(t)=Ak?(t)cos(?k?(t))(3)
s.t. ∑ k u k = f (4) \text{s.t.} \quad \sum_k u_k = f \tag{4} s.t.k∑?uk?=f(4)
其中, u k ( t ) u_k(t) uk?(t) 表示在時間 t t t 的模態函數集合, ω k ( t ) \omega_k(t) ωk?(t) 為每個模態函數的中心頻率, k k k 為模態分解的總個數, δ ( t ) \delta(t) δ(t) 描述各子模態函數的中心頻率。
VMD 是一種能夠通過多分辨率分解非線性信號的方法(Humphrey 等,1996),可同時處理非遞歸和遞歸信號,實現變分模態信號的頻帶分離。VMD 分解后可獲得多個具有不同頻率特性的內稟模態函數(IMFs),通過重構可分別得到趨勢項、季節項以及殘差項。
殘差部分主要受人為活動及其他隨機噪聲影響。根據實地調查與對新鋪滑坡的綜合分析,本研究不對該部分進行進一步建模分析。
3.3 基于注意力機制的深度學習建模
3.3.1 趨勢項預測
在本研究中,滑坡位移時間序列的趨勢項與季節項分別采用 ARIMA 模型與 CNN 模型進行建模與預測。
首先,趨勢項采用 自回歸積分滑動平均模型(ARIMA) 進行建模。ARIMA 模型基于時間序列的歷史數據,通過自相關分析與差分處理構造時間序列片段,進而預測未來位移值。ARIMA 模型由三部分組成:自回歸(AR)、差分整合(I)和移動平均(MA)。
- 自回歸部分考慮前期觀測值對當前值的影響;
- 差分部分通過一階或二階差分等方式消除非平穩性;
- 移動平均部分則考慮前期預測誤差對當前值的影響(Peng 等,2024)。
ARIMA 模型的數學表達如下(Contreras 等,2003):
{ AR: Y t = c + ? 1 Y t ? 1 + ? 2 Y t ? 2 + ? + ? p Y t ? p + ε t MA: Y t = μ + ε t + θ 1 ε t ? 1 + θ 2 ε t ? 2 + ? + θ q ε t ? q (5) \begin{cases} \text{AR:} \quad Y_t = c + \phi_1 Y_{t-1} + \phi_2 Y_{t-2} + \cdots + \phi_p Y_{t-p} + \varepsilon_t \\ \text{MA:} \quad Y_t = \mu + \varepsilon_t + \theta_1 \varepsilon_{t-1} + \theta_2 \varepsilon_{t-2} + \cdots + \theta_q \varepsilon_{t-q} \end{cases} \tag{5} {AR:Yt?=c+?1?Yt?1?+?2?Yt?2?+?+?p?Yt?p?+εt?MA:Yt?=μ+εt?+θ1?εt?1?+θ2?εt?2?+?+θq?εt?q??(5)
其中:
- Y t Y_t Yt? 為時間序列值;
- c c c 是常數項;
- ? 1 , ? 2 , … , ? p \phi_1, \phi_2, \ldots, \phi_p ?1?,?2?,…,?p? 是 AR 部分的參數,描述當前值與過去 p p p 個值之間的關系;
- θ 1 , θ 2 , … , θ q \theta_1, \theta_2, \ldots, \theta_q θ1?,θ2?,…,θq? 是 MA 部分的參數,描述當前值與過去 q q q 個誤差之間的關系;
- ε t \varepsilon_t εt? 為時間點 t t t 的誤差項。
3.3.2 季節項預測
圖 3a 展示了本研究中所采用的 CNN-Attention-BiGRU 模型的流程圖。在該模型中,輸入數據為五種誘發因子的季節項時間序列,首先通過 一維卷積 的 CNN 層進行卷積處理。為了擴大感受野、提取更加有效的特征信息,第一層卷積層采用了較寬的卷積核;而在池化層則采用了 全局平均池化(Global Average Pooling)。該池化操作對卷積層提取的特征進行重采樣,并提取其全局信息,隨后引入到注意力通道中。
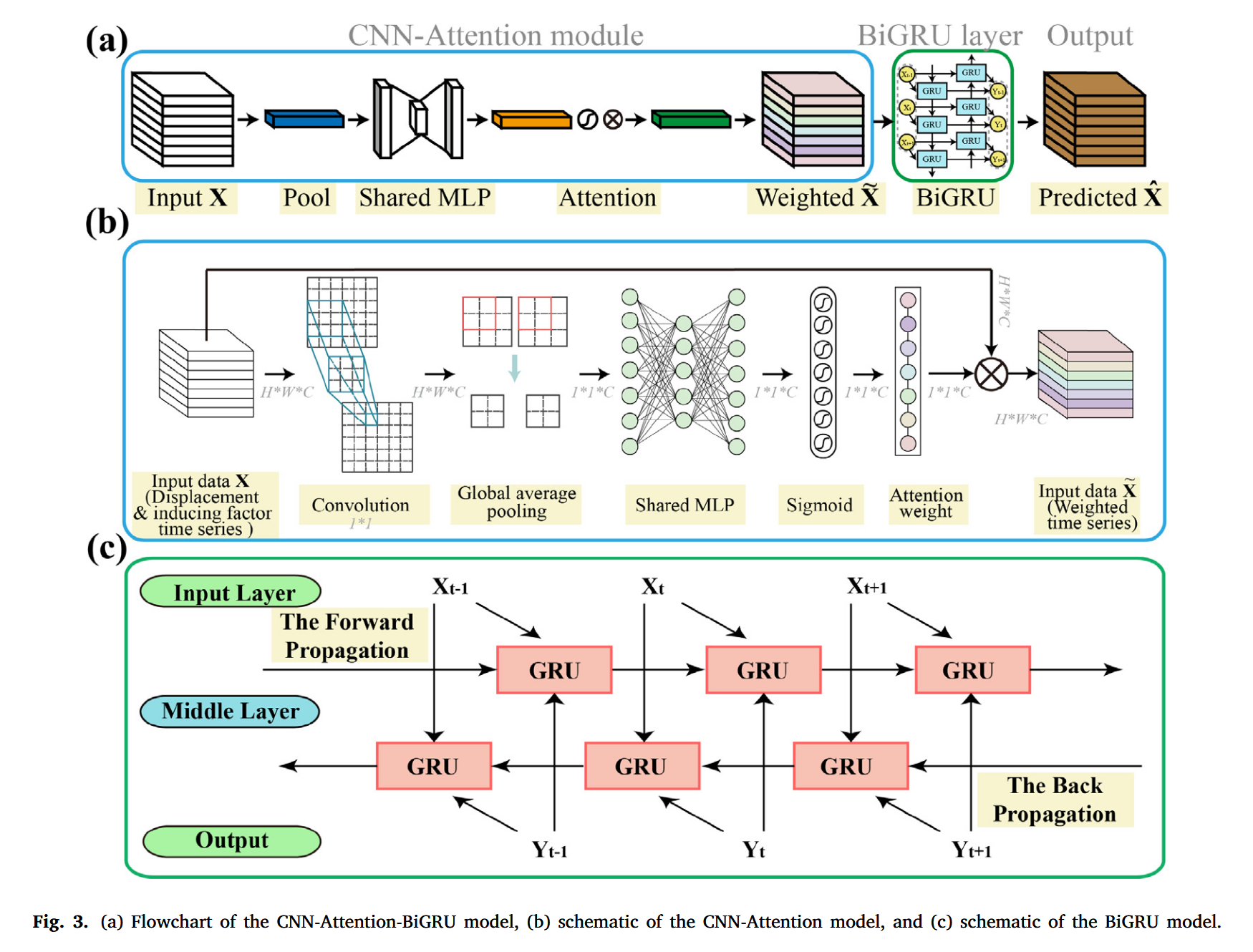
在注意力層中,使用共享的 多層感知機(Multi-Layer Perceptron,MLP) 實現特征變換和信息重組,之后傳遞至全連接層(Fully Connected Layer, FC)并接入 Sigmoid 激活函數。最后,增強后的特征被輸入到 雙向門控循環單元(BiGRU) 層,用于時間序列預測。
CNN 網絡由若干卷積層、池化層和全連接層構成,具備強大的特征提取能力(圖 3b)。CNN 的核心操作是 卷積算子,它能融合局部感受野內的空間信息和通道信息以構建具有判別性的特征。卷積層采用不同大小的卷積核,有效提取輸入特征圖中的局部關鍵特征;池化層則對特征圖進行壓縮,降低維度并簡化網絡計算復雜度;最終,全連接層將所有特征進行整合并傳遞至分類器輸出。
BiGRU(雙向 GRU) 是一種雙向循環神經網絡,它在原始 GRU 模型的基礎上引入了反向傳播機制,即同時包含正向 GRU 與反向 GRU 兩層(圖 3c)。一層處理輸入序列的正向信息,另一層則處理反向信息,最后將兩層的輸出進行融合,從而生成最終輸出結果。這一結構增強了模型在時間序列雙向特征提取方面的能力,使其能夠捕捉當前數據與過去及未來的關聯關系。
GRU 本身包含兩個門控單元:重置門(reset gate) 和 更新門(update gate)。在任意時間步 t t t,GRU 神經元接受兩個輸入:前一時刻的隱藏狀態 h t ? 1 h_{t-1} ht?1? 與當前輸入 x t x_t xt?,并輸出當前隱藏狀態 h t h_t ht?。與 LSTM 相比,GRU 將遺忘門和輸入門合并為一個更新門,從而簡化了結構。重置門控制當前輸入與前一隱藏狀態的結合程度,其計算依賴于 Sigmoid 激活函數:
z t = σ ( W z ? [ h t ? 1 , x t ] + b z ) r t = σ ( W r ? [ h t ? 1 , x t ] + b r ) h ~ t = tanh ? ( W ? [ r t ? h t ? 1 , x t ] + b ) h t = ( 1 ? z t ) ? h t ? 1 + z t ? h ~ t (6) \begin{aligned} z_t &= \sigma(W_z \cdot [h_{t-1}, x_t] + b_z) \\ r_t &= \sigma(W_r \cdot [h_{t-1}, x_t] + b_r) \\ \tilde{h}_t &= \tanh(W \cdot [r_t \cdot h_{t-1}, x_t] + b) \\ h_t &= (1 - z_t) \cdot h_{t-1} + z_t \cdot \tilde{h}_t \end{aligned} \tag{6} zt?rt?h~t?ht??=σ(Wz??[ht?1?,xt?]+bz?)=σ(Wr??[ht?1?,xt?]+br?)=tanh(W?[rt??ht?1?,xt?]+b)=(1?zt?)?ht?1?+zt??h~t??(6)
其中:
- z t z_t zt? 為更新門;
- r t r_t rt? 為重置門;
- h ~ t \tilde{h}_t h~t? 為候選隱藏狀態;
- h t h_t ht? 為當前隱藏狀態;
- W W W 和 b b b 分別為權重矩陣與偏置項。
3.4 精度評價與對比
為了驗證所提出方法的性能,本文開展了對比實驗,分別使用 CNN-BiGRU、BiGRU 以及 BiLSTM 模型對滑坡運動進行預測。
為更有效地展示本文方法的優勢,首先采用 經典的 K-means 聚類算法,基于變形幅度將所有散射點進行分類。聚類數目的確定基于 肘部法則(Elbow Method),即評估聚類內誤差平方和隨聚類數的變化趨勢。
在每個聚類中,隨機選取若干散射點,對其預測位移時間序列進行建模,并與其他模型的預測結果進行比較。詳細分析與對比結果見 結果與討論 章節。
在模型訓練中,CNN-Attention-BiGRU 的具體參數設定如下(見表 1):
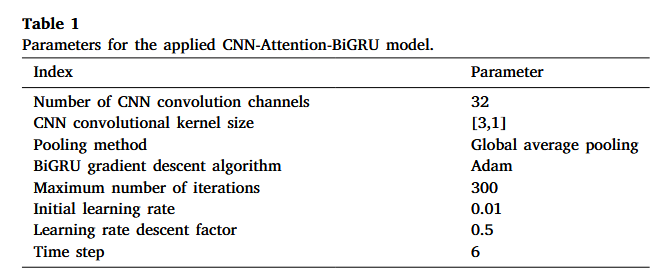
- CNN 的卷積通道數設為 32;
- 卷積核大小設為 [ 3 , 1 ] [3,1] [3,1];
- BiGRU 采用 Adam 優化算法;
- 最大迭代次數設為 300;
- 初始學習率為 0.01;
- 學習率衰減因子設為 0.5;
- 時間步長度為 6。
所有模型的訓練與計算均在高性能工作站上完成,確保了高效的數據讀寫與計算性能。在效率方面,每個散射點的預測過程約需 8–10 分鐘。
數據劃分上,77% 的時間序列被用于訓練,剩余部分用于模型驗證。
為了進一步評估模型性能,采用 均方根誤差(RMSE)、平均絕對誤差(MAE) 和 決定系數( R 2 R^2 R2) 三項指標,其計算公式如下:
- 平均絕對誤差:
MAE = 1 n ∑ t = 1 n ∣ y r ( t ) ? y p ( t ) ∣ (7) \text{MAE} = \frac{1}{n} \sum_{t=1}^{n} \left| y_r(t) - y_p(t) \right| \tag{7} MAE=n1?t=1∑n?∣yr?(t)?yp?(t)∣(7)
- 均方根誤差:
RMSE = 1 n ∑ t = 1 n ( y r ( t ) ? y p ( t ) ) 2 (8) \text{RMSE} = \sqrt{ \frac{1}{n} \sum_{t=1}^{n} \left( y_r(t) - y_p(t) \right)^2 } \tag{8} RMSE=n1?t=1∑n?(yr?(t)?yp?(t))2?(8)
- 決定系數:
R 2 = 1 ? ∑ t = 1 n ( y r ( t ) ? y p ( t ) ) 2 ∑ t = 1 n ( y r ( t ) ? y ˉ r ) 2 (9) R^2 = 1 - \frac{\sum_{t=1}^{n} (y_r(t) - y_p(t))^2}{\sum_{t=1}^{n} (y_r(t) - \bar{y}_r)^2} \tag{9} R2=1?∑t=1n?(yr?(t)?yˉ?r?)2∑t=1n?(yr?(t)?yp?(t))2?(9)
其中:
- y p ( t ) y_p(t) yp?(t) 表示模型預測值;
- y r ( t ) y_r(t) yr?(t) 表示實際位移值;
- y ˉ r \bar{y}_r yˉ?r? 表示實際值的平均值;
- n n n 為樣本數。
MAE 與 RMSE 是連續變量預測中最常用的評估指標,分別表示預測值與觀測值之間的絕對誤差和平方誤差。 R 2 R^2 R2(決定系數)用于衡量回歸模型的擬合優度,其取值范圍為 [ ? 1 , 1 ] [-1,1] [?1,1]:
- 當 R 2 = 1 R^2 = 1 R2=1 時,模型擬合完美,能夠完全解釋因變量的變化;
- 當 R 2 = 0 R^2 = 0 R2=0 時,模型擬合效果與使用因變量均值預測效果相同;
- 若 R 2 < 0 R^2 < 0 R2<0,則說明模型擬合效果甚至不如簡單平均預測,可能由于模型結構與數據特征嚴重不匹配(如對非線性數據采用線性模型等)。
4. 結果分析
4.1 MT-InSAR 形變與環境配置
4.1.1 邊坡不穩定性與誘發因素
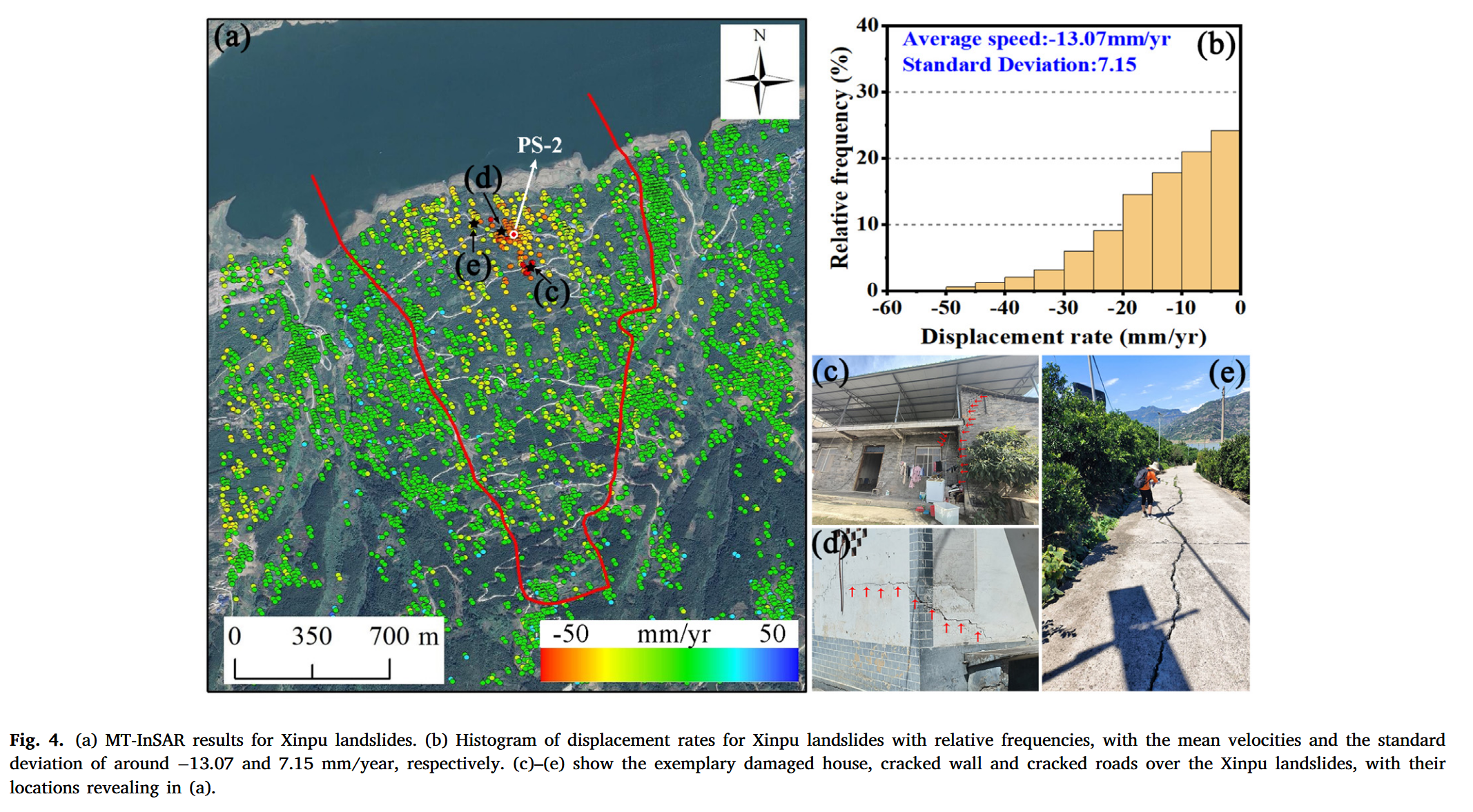
圖 4 展示了 2016 年 3 月至 2022 年 6 月期間基于 InSAR 技術獲取的辛鋪滑坡形變及其空間分布情況。滑坡形變量呈現出顯著的空間異質性,中段及前緣處變形最為劇烈,后緣區域則相對較弱。其中前緣中部是變形最嚴重的區域,年均變形速率高達 ? 52.16 mm/year -52.16 \ \text{mm/year} ?52.16?mm/year。統計分析結果顯示,在此期間辛鋪滑坡的平均年變形速率為 ? 13.07 mm/year -13.07 \ \text{mm/year} ?13.07?mm/year。其中,62.89% 的點位變形速率介于 0 0 0 至 ? 15 mm/year -15 \ \text{mm/year} ?15?mm/year 之間,29.63% 位于 ? 15 -15 ?15 至 ? 30 mm/year -30 \ \text{mm/year} ?30?mm/year 之間,僅有 7.48% 的點位變形速率超過 ? 30 mm/year -30 \ \text{mm/year} ?30?mm/year(圖 4b)。實地調查驗證了 InSAR 監測結果的準確性:在滑坡前緣房屋內發現多條裂縫(圖 4c–4d),而在前緣中部道路上則發現一條約 100 米長的裂縫(圖 4e),與 InSAR 數據高度一致。
4.1.2 多個水文年的形變對比
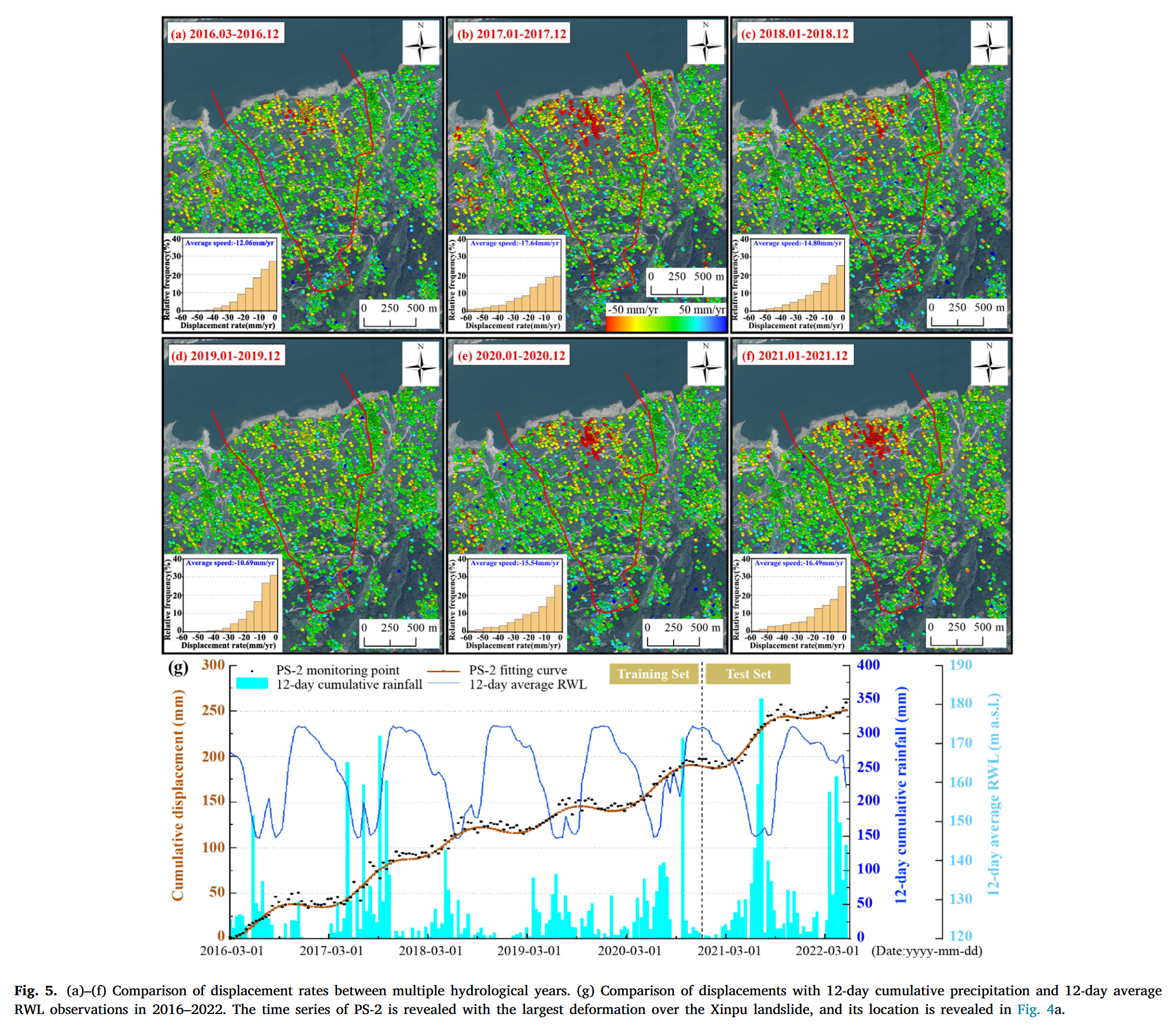
水文年定義為連續 12 個月的周期,其劃分原則是使儲水變化最小化,從而最大程度地降低年際間水量差異(Nalbantis 和 Tsakiris, 2009)。我們統計分析了 2016–2021 年間的滑坡形變數據(圖 5)。從結果來看,辛鋪滑坡在各水文年內具有一致的形變空間分布,即變形強弱區域大致相似,但形變強度在不同年份之間存在明顯差異。2017 年是形變最劇烈的一年,平均年變形速率為 ? 17.64 mm/year -17.64 \ \text{mm/year} ?17.64?mm/year,其中 17.07% 的 InSAR 點位年變形速率超過 ? 30 mm/year -30 \ \text{mm/year} ?30?mm/year,強變形區的范圍也最大(圖 5b)。
相比之下,2019 年的形變最為穩定,平均變形速率僅為 ? 10.69 mm/year -10.69 \ \text{mm/year} ?10.69?mm/year,其中 74.31% 的點位年變形速率低于 ? 15 mm/year -15 \ \text{mm/year} ?15?mm/year,超過 ? 30 mm/year -30 \ \text{mm/year} ?30?mm/year 的僅占 3.36%。在 2016、2018、2020 和 2021 年,滑坡前緣,尤其是中段,依然表現出顯著變形,年變形速率分別為 ? 12.06 -12.06 ?12.06、 ? 14.80 -14.80 ?14.80、 ? 15.54 -15.54 ?15.54 和 ? 16.49 mm/year -16.49 \ \text{mm/year} ?16.49?mm/year。圖 5g 展示了滑坡運動對應時期內的 12 天累計降雨量與 12 天平均庫水位(RWL)變化曲線,其中 PS-2 點位形變最大。三峽水庫水位的泄放與回蓄表現出相對一致且重復的規律。典型的“臺階狀”位移模式揭示了滑坡的蓄水誘發特征,可能與孔隙水壓力增加有關(Xia 等, 2024)。降雨數據顯示出強烈的年際差異,2017 年和 2021 年降雨量顯著高于其他年份,并與滑坡加速形變時段高度重合。可以看出,2019 年滑坡活動趨于穩定,2020 和 2021 年再次活躍。我們將在后續章節中對 2017 年進行更為詳細的定量分析。
4.1.3 單一水文年(2017 年)內的統計比較
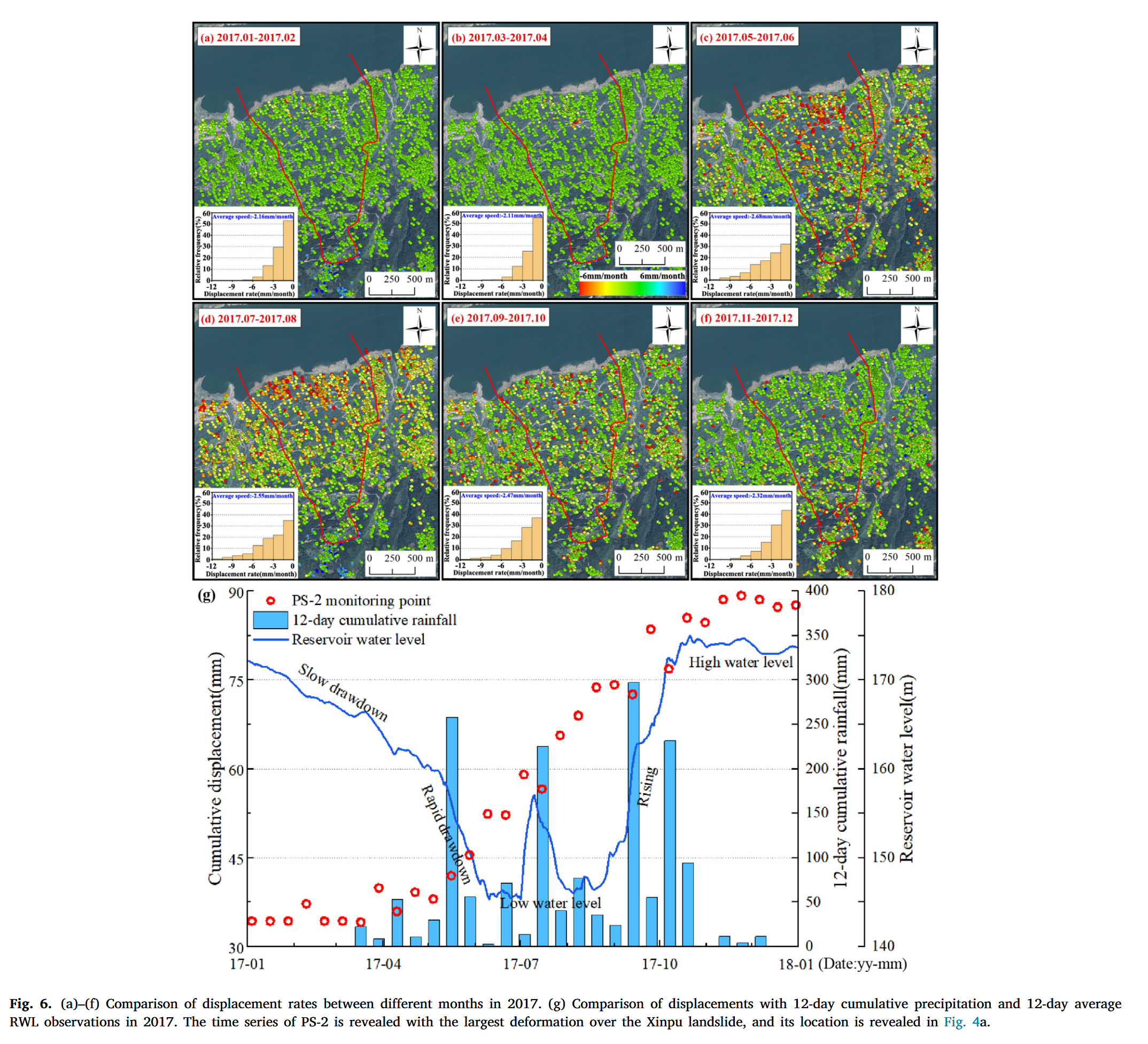
研究區的降雨與水位變化在一個水文年內具有明顯的周期性特征(Xia 等, 2024;Zhou 等, 2022a)。多水文年形變對比分析表明,2017 年是滑坡活動最強的一年,因此我們選取 2017 年作為典型案例,展示單一水文年內的滑坡形變演化過程(圖 6)。2017 年 1 月至 4 月,水位從 175 m 緩慢下降至 162 m,此階段累計降雨量為 86 mm,日最大降雨量為 20 mm,滑坡處于緩慢變形或停滯狀態。5–6 月,庫水位快速下降至 145 m,疊加雨季初期的降雨過程(累計降雨量 357.5 mm,日最大降雨量 237.5 mm),導致滑坡前緣中部和左側區域迅速啟動,變形速率加快。7–8 月,水位持續維持低位并出現小幅波動,累計降雨量達 486.5 mm,最大日降雨量為 116 mm,前緣區域變形進一步加劇。9–10 月,隨著三峽水庫開始蓄水,水位逐漸上升,盡管此階段降雨總量仍高(679.5 mm),但滑坡變形趨緩。11–12 月,水位回升至 175 m 并趨于穩定,降雨減少,滑坡進入穩定狀態。
4.1.4 滑坡運動驗證與分類
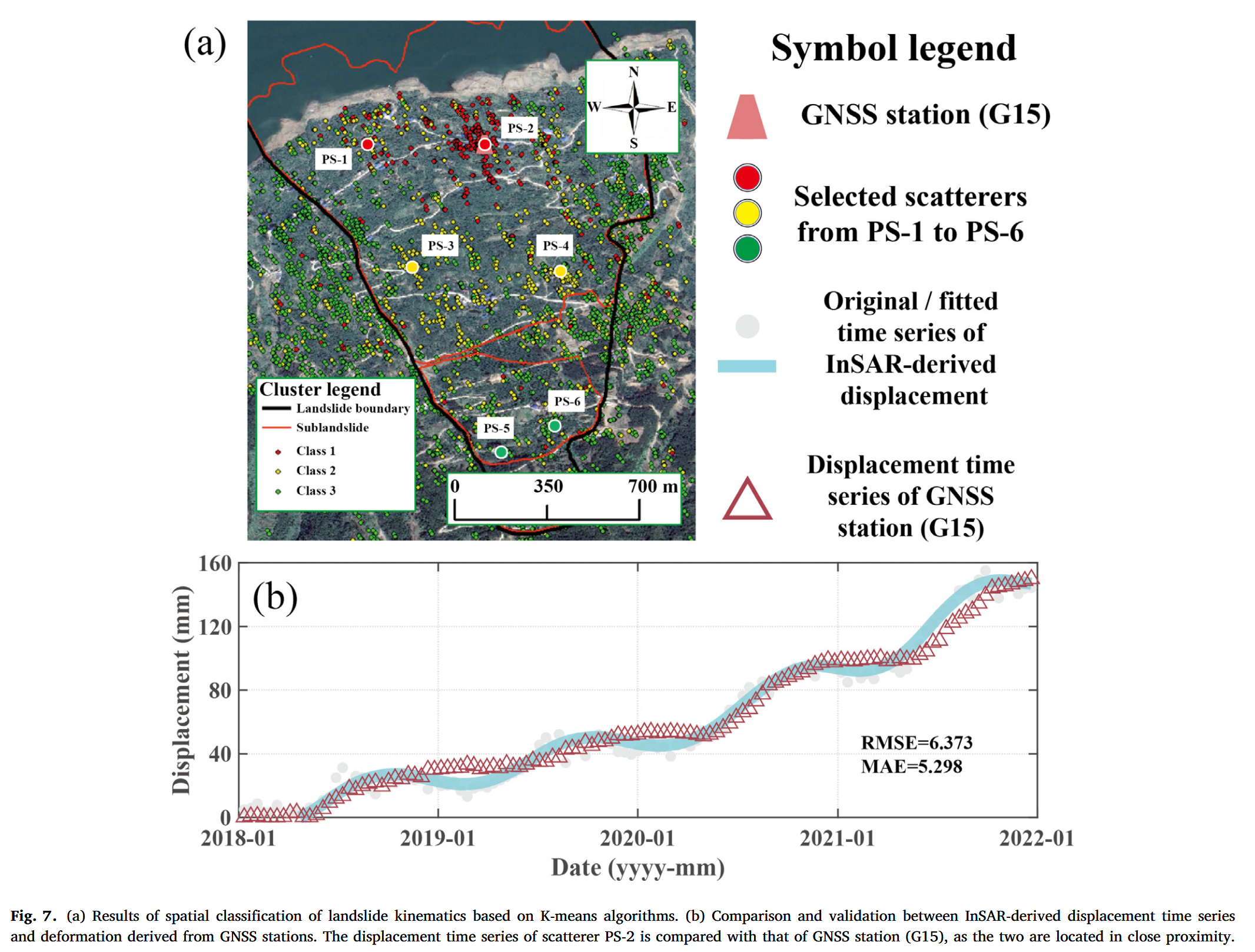
為進一步驗證 InSAR 監測結果,我們將 InSAR 提取得到的位移時間序列與辛鋪滑坡 GNSS 監測站獲取的形變數據進行了對比。圖 7 顯示了 PS-1 點位與 GNSS 站 G15 的對比結果。GNSS 數據根據 Dai 等(2022)的方法,結合滑坡坡向與坡度信息,轉換至雷達 LOS 方向。對比結果表明兩者高度吻合,均方根誤差(RMSE)約為 0.64 cm,平均絕對誤差(MAE)約為 0.53 cm,顯示出 InSAR 在形變監測方面的可靠性與精度可媲美高精度 GNSS 測量。為了進一步分析滑坡區域內部差異,我們基于變形幅度采用 K-means 聚類算法對所有散射點進行空間分類(圖 7)。其中 Class 1(紅色)為快速變形點,主要集中于滑坡前緣區域;Class 2 和 Class 3 分別代表中速與慢速變形點,主要分布在滑坡體內部和后緣區域。每一類中隨機選取兩個典型散射點,作為后續預測分析的代表點。
4.2 滑坡變形預測
4.2.1 位移時間序列的分解
在本研究中,我們采用了VMD(變分模態分解)模型對LOS(視線方向)上的總位移進行分解。該方法假設信號是由一系列子信號組成的,每個子信號具有特定的中心頻率和有限的帶寬,這些子信號被稱為IMFs(本征模態函數)。由于所使用的Copernicus數字高程模型(DEM)的分辨率限制,我們未進行坡度方向轉換。
VMD利用經典的維納濾波思想,通過求解一個變分問題來獲得這些IMF分量。該變分問題旨在識別信號在頻域中的中心頻率和帶寬約束,從而有效地提取出每個中心頻率所對應的有意義信號分量。通過在頻域中分析非周期性信號,這種方法可以將復雜信號分解為多個諧波信號。
在對位移序列進行分解和重構之后,我們得到了趨勢項與周期項,并分別對這兩個分量進行了預測。VMD分解結果如圖8所示。我們在圖7所示的新浦滑坡區域中為每一類隨機選取了兩個散射點(PS點),以詳細展示時間序列的預測過程。這些點的位置在圖7中展示。
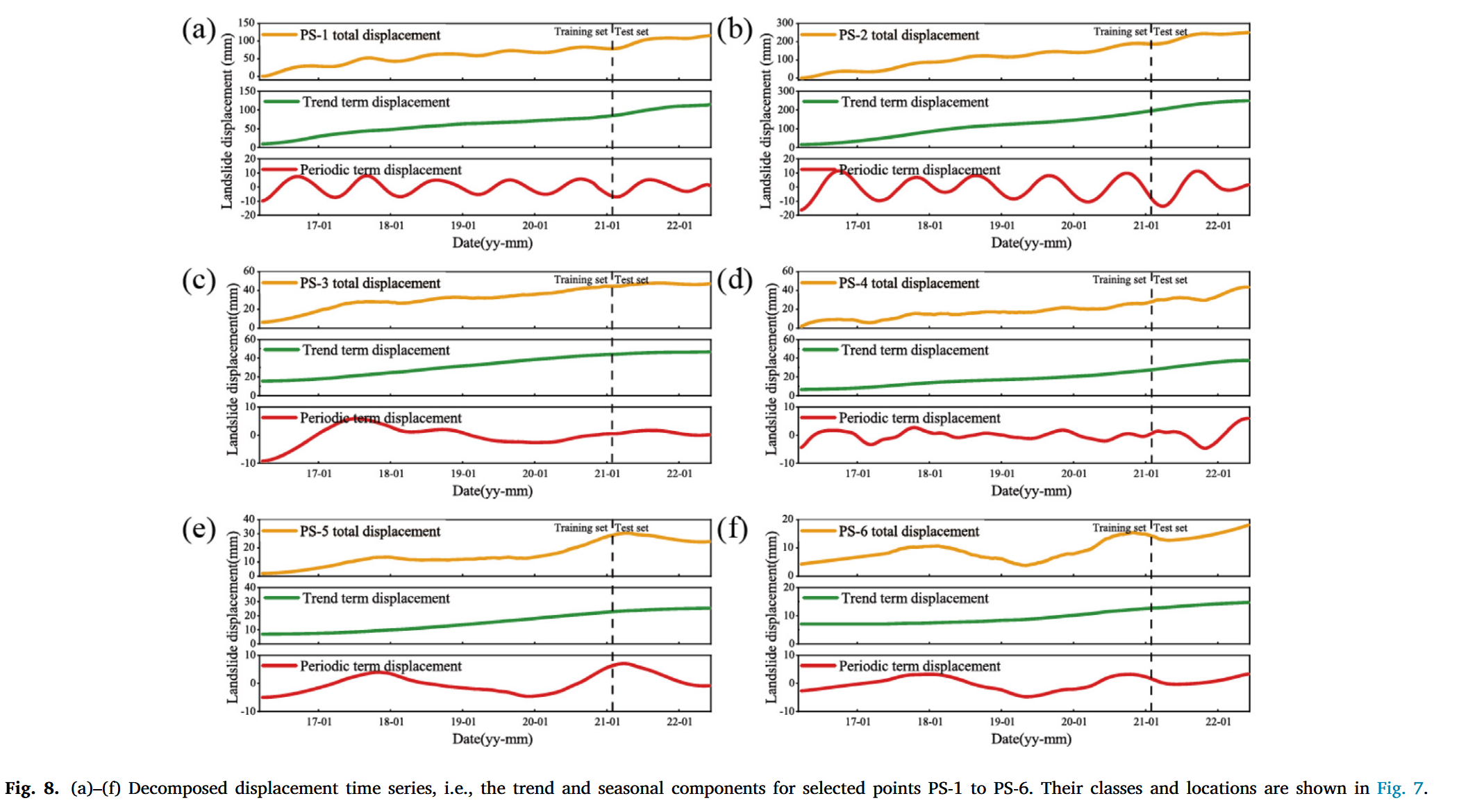
通過分解,可以簡化復雜的時間序列,從而提升預測的準確性。該方法通過分離位移序列中的基本組成成分,實現了更精確的分析,最終提高了滑坡位移的預測能力。
4.2.2 趨勢與季節性分量預測
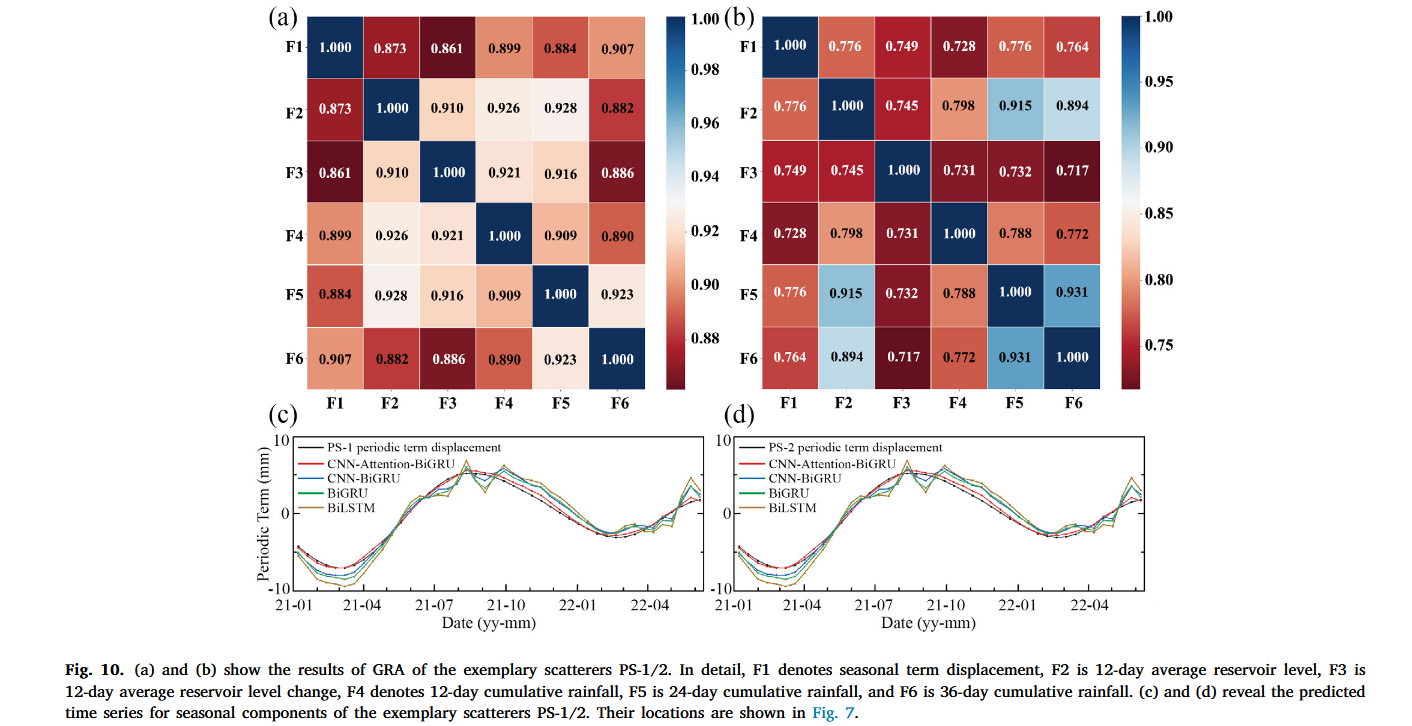
采用 ARIMA 模型對 PS-1 至 PS-6 的趨勢項位移進行預測,如圖 9 所示。測試結果表明,所選 InSAR 監測點的趨勢項測試集的所有 R 2 R^2 R2 值均超過 0.9,表明該模型在使用 ARIMA 方法準確預測趨勢項位移方面的有效性。這個高 R 2 R^2 R2 值表示預測位移趨勢與實際位移趨勢之間存在強相關性,驗證了趨勢項預測的可靠性與精度。接下來,我們估算了 12 天、24 天和 36 天累積降雨量、12 天平均庫水位(RWL)與這些五個因素變化與 InSAR 監測點 PS-1 和 PS-2 季節性項之間的相關性。此相關性通過灰色關聯分析(GRA)進行驗證,以檢查這些誘發因子序列與滑坡位移變化之間的關系。
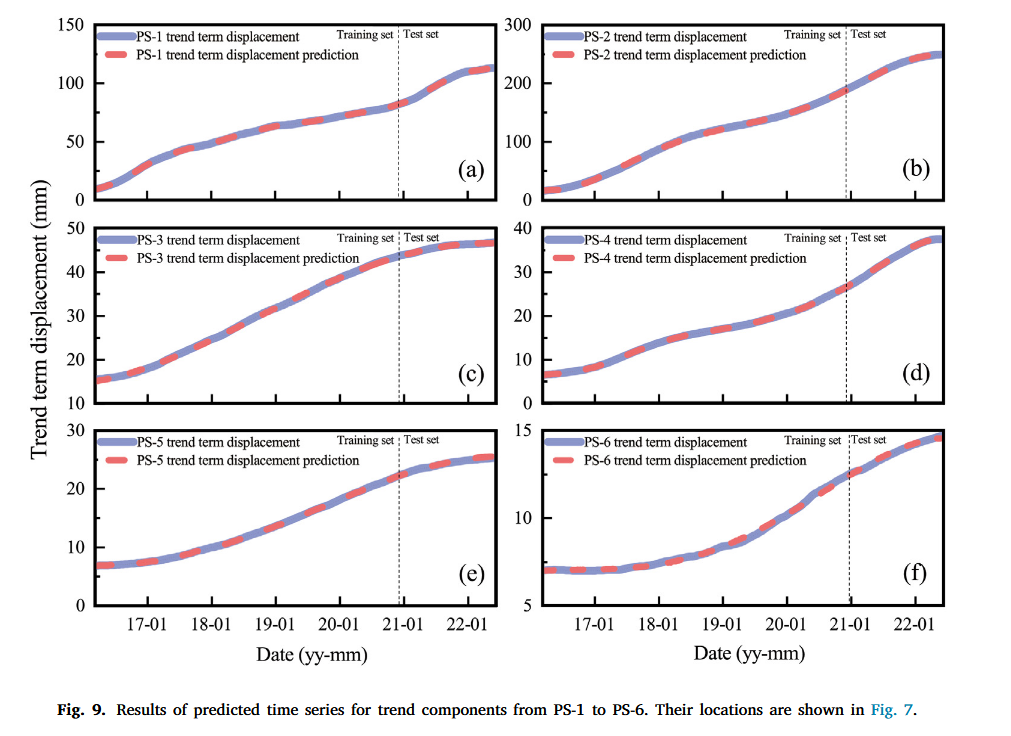
圖 10 顯示了 PS-1 和 PS-2 兩個 InSAR 監測點的季節性項與五個因素之間的灰色關聯性。總體來看,估算的灰色關聯度均超過 0.7,揭示了降雨量和 RWL 對辛鋪滑坡的顯著影響。隨后,使用 CNN-Attention-BiGRU 模型結合誘發因子序列預測散射點的季節性項。訓練使用了 2016 年 3 月至 2020 年 12 月的 146 個位移數據,2021 年 1 月至 2022 年 6 月的 44 個數據作為測試集。結果如圖 10 所示,突出了我們提出的模型在預測季節性位移方面的表現。通過與 CNN-BiGRU、BiGRU 和 BiLSTM 模型的對比實驗,結果表明我們提出的方法在建模季節性項方面具有優越的表現。后續的討論將進一步詳細闡述這一點。
4.2.3 滑坡位移時間序列的組成
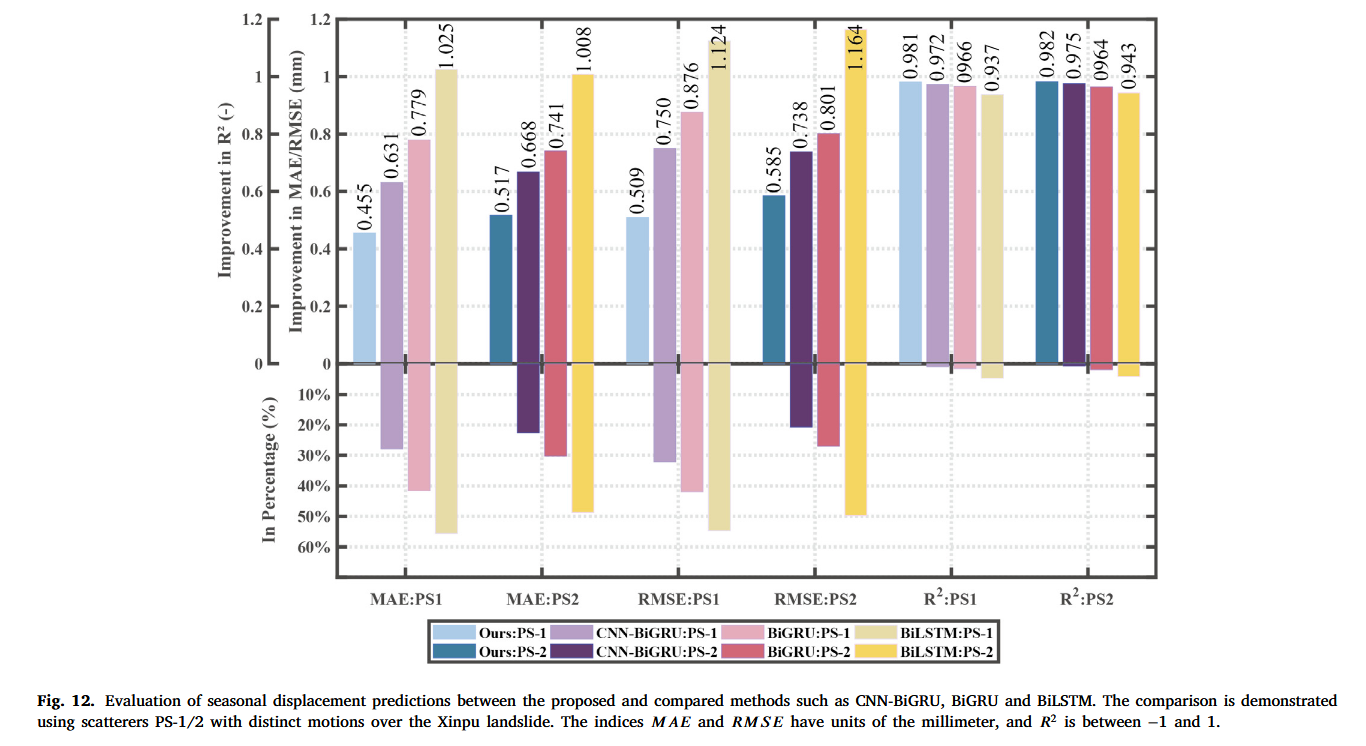
通過將滑坡位移趨勢項與季節性項相加得到累積位移預測結果,如圖 11 所示。對具有最大運動的 Class 1 中兩個典型散射點 PS-1/2 進行預測,并與 CNN-BiGRU、BiGRU 和 BiLSTM 等常見預測模型進行比較。同時,展示了散射點的監測累積位移,作為標準值進行對比。從結果來看,我們的方法在預測滑坡運動學方面表現更好,尤其是在位移變化顯著的時期,并進行了詳細的統計比較。
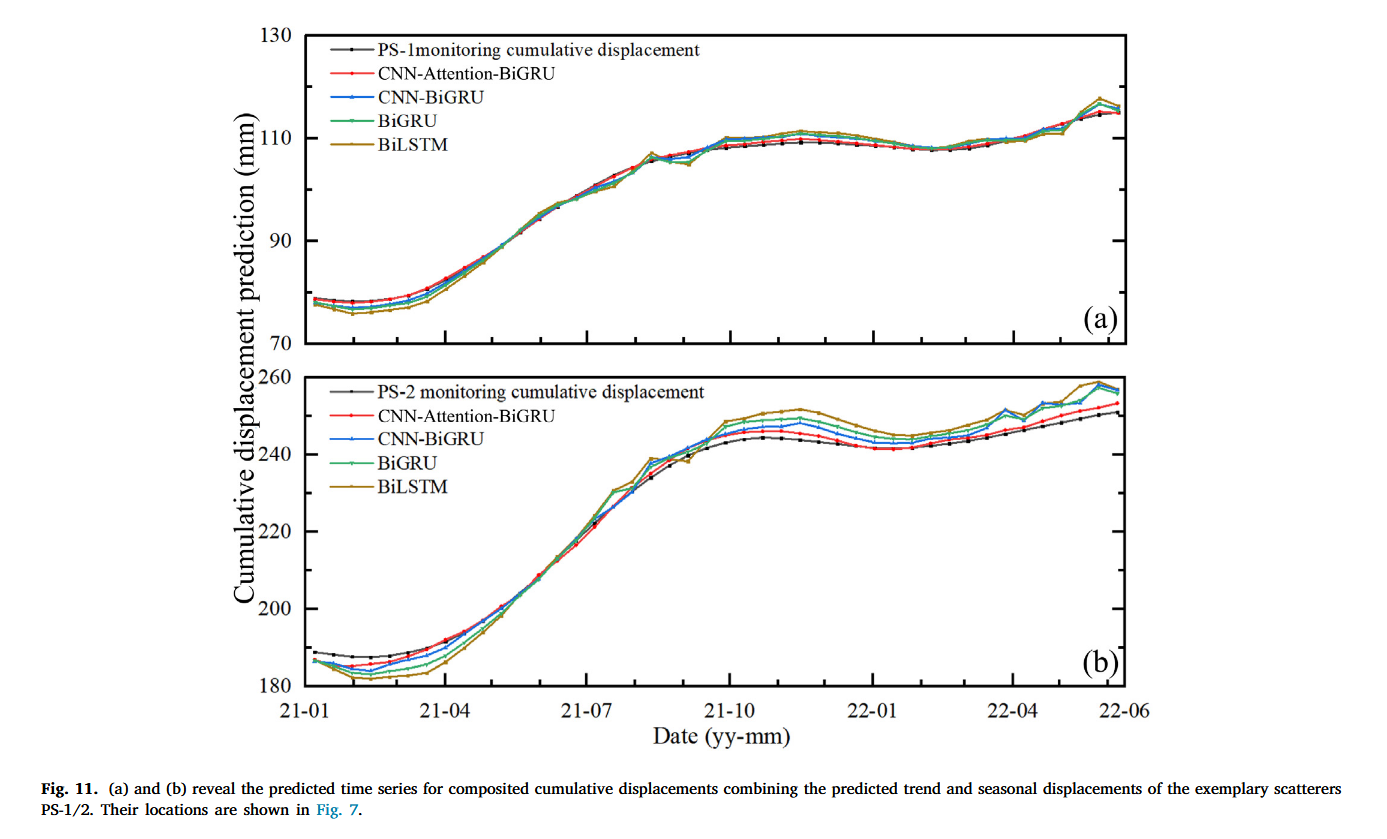
圖 12 展示了準確性統計和實驗結果,表明本文提出的 CNN-Attention-BiGRU 模型在整體預測精度方面優于其他傳統模型。該比較使用了辛鋪滑坡中具有較大運動的 PS-1/2 散射點,這些散射點在之前的分類中被歸類為 Class 1。對于 PS-1 點,我們提出的方法在 MAE、RMSE 和 R 2 R^2 R2 上的改善幅度分別為約 39% 至 56%、32% 至 55% 和 1% 至 5%,相比于 CNN-BiGRU、BiGRU 和 BiLSTM 模型。對于 PS-2 點,這些改善幅度分別為 MAE 約 23% 至 49%、RMSE 約 21% 至 50%、 R 2 R^2 R2 約 1% 至 4%。 R 2 R^2 R2 值表明所有模型表現良好,但我們的方法在預測滑坡運動學時更加穩定和精確,尤其是在顯著位移變化期間,如圖 11 所示。CNN 和注意力機制的結合有效降低了滑坡位移預測的誤差,增強了其預測性能和能力。
4.2.4 我們方法的魯棒性評估
為了進一步評估我們提出的方法的魯棒性,我們使用相同的參數進行了額外的實驗,即我們多次預測周期性分量和總滑坡運動學,每個選定的散射點從 PS-1 到 PS-6 進行了 10 次實驗。結果如圖 13 和圖 14 所示。結果表明,預測的滑坡運動學并非總是恒定的;相反,它們在一個接近真實位移的范圍內變化。
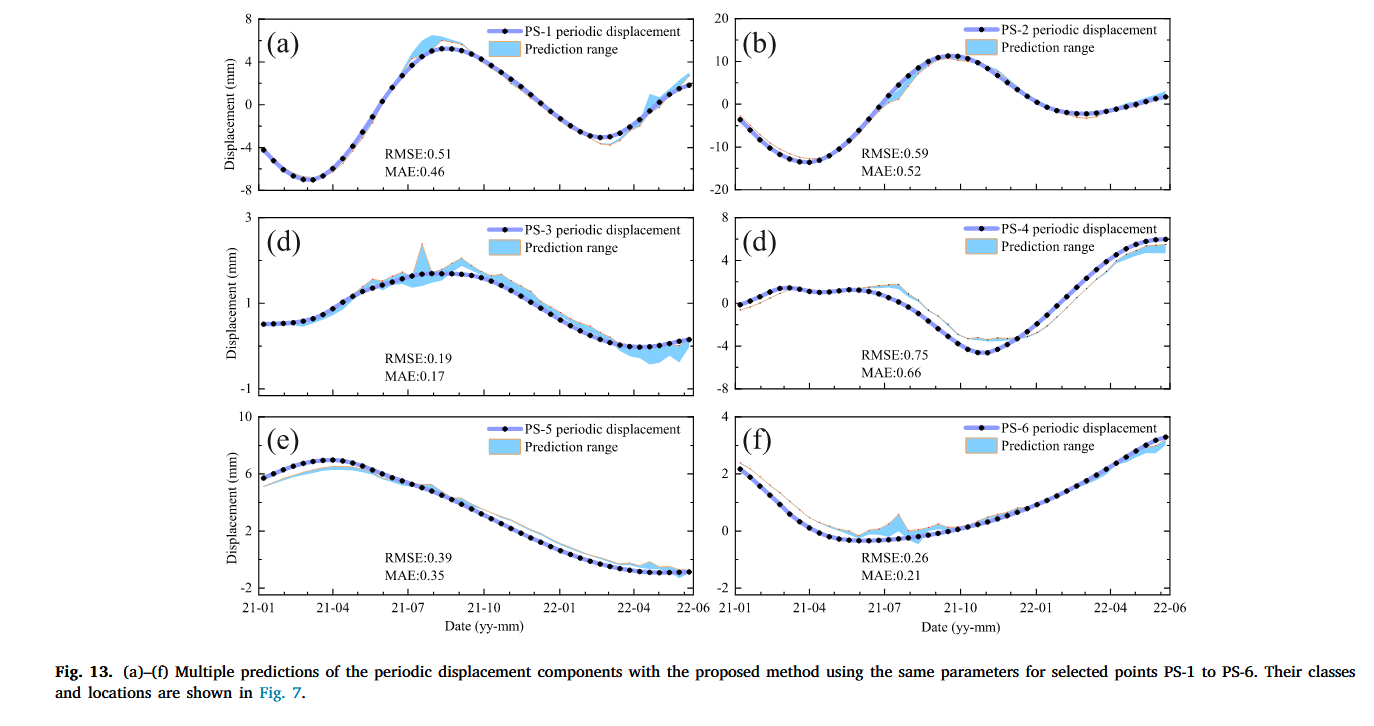
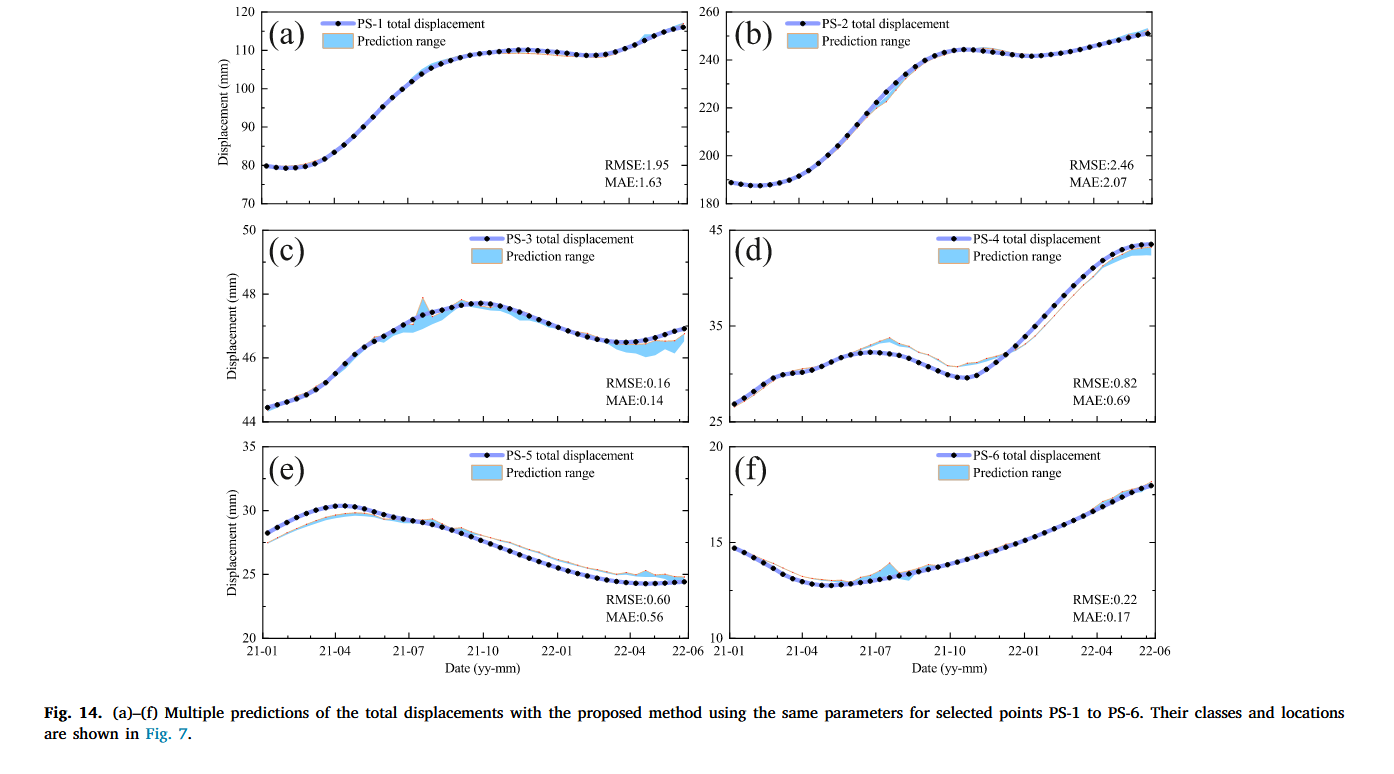
因此,預測的周期性變形分量的 RMSE 和 MAE 值分別在 0.19–0.75 和 0.17–0.66 mm 之間。而對于預測的累積位移,RMSE 和 MAE 范圍分別為 0.16–2.46 和 0.14–2.07 mm。顯然,Class 1 中具有較大運動的散射點 PS-1/2 的預測誤差比其他點更大。此外,PS-3 的預測在所有選定散射點中最為準確。與大多數先前在深度學習和時間序列分析中的研究不同,這些研究通常在將時間序列分解后才將其分為訓練和測試數據集(Liu 等, 2024;Song 等, 2024;Wang 等, 2023, 2022),這種方法可能會影響預測結果的客觀性。
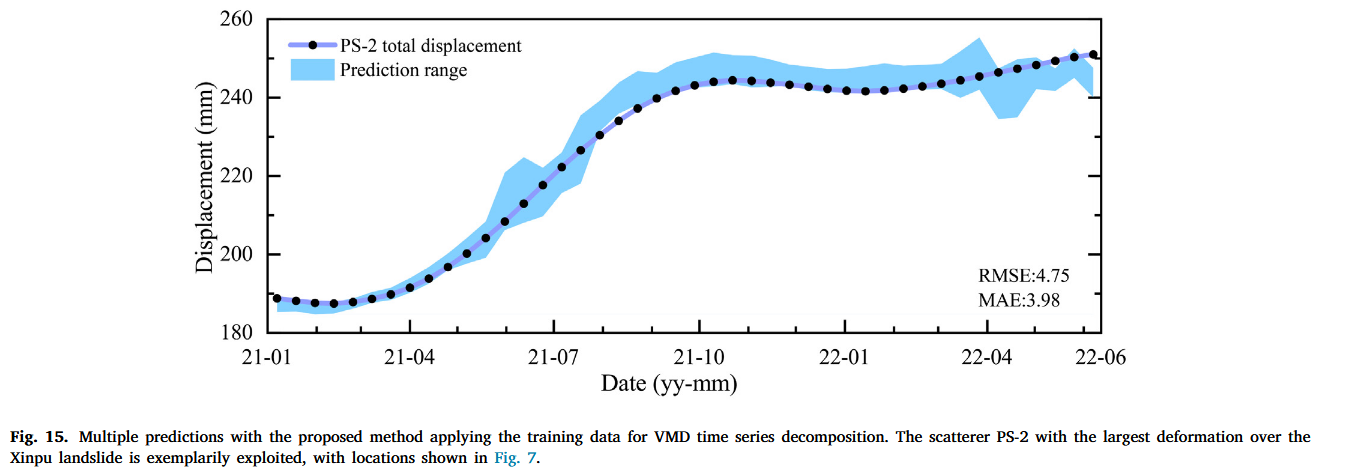
為此,我們進行了額外的實驗,進一步評估了分解策略的影響,即我們通過僅將 VMD 技術應用于訓練數據來修改我們的方法論,而將剩余的時間序列保持不變,以便直接預測后續的運動。結果如圖15所示,表明這種調整后的策略仍能有效捕捉運動特征,盡管與之前策略的結果相比誤差略大。盡管存在這些誤差,整體結果的幅度仍然相當接近,預測覆蓋的范圍也更廣。整體 MAE 和 RMSE 分別約為 4.0 和 4.8 mm。這個修訂后的策略與深度學習中的時間序列預測標準實踐一致,提供了更好的客觀性,同時保持了可接受的精度。盡管精度略遜一籌,但這種方法可能更適用于地質災害預測等地質學深度學習實際應用中。該實驗的結果可能為遙感領域提供有價值的見解,尤其是增強復雜環境中預測深度學習模型的可靠性。
5. 討論
5.1 地質特性與觸發因素
XinPu滑坡體以第四紀松散沉積物為主,土壤為含有礫石的粉質粘土,提供了豐富的滑坡物質。以往研究發現,該地區容易發生滲流驅動的滑坡,滑坡體內滲透性差,降雨和 RWL 變化也是影響滑坡發生的關鍵因素(Xia 等, 2024;Zhou 等, 2022a;Lacroix 等, 2020;Tomás 等, 2016)。降水增加可通過提高水分含量降低土壤的抗剪強度,增強滑動體的滲流過程。土壤強度的軟化和孔隙水壓力的增加,進一步降低了坡體穩定性。在暴雨過程中,水迅速通過松散的土壤結構滲透到隔水層中,大量水分積聚導致滑動帶土壤軟化。至于 RWL 波動,當 RWL 快速下降時,滑坡體內的地下水不易滲出,從而在地下水位和 RWL 之間形成水頭差。由此產生的外向滲流力可能導致滑坡滑動力的增加。
5.2 基于機器學習的變形預測
在本研究中,我們選擇了 VMD 方法進行時間序列分解。盡管還有其他方法,如獨立成分分析(ICA)(Peng 等, 2022)和傅里葉變換(Singh 等, 2017),VMD 具有獨特的優勢,使其特別適合我們的應用,即 VMD 生成的模型函數具有清晰的物理可解釋性,增強了信號分析和理解(Rehman 和 Aftab, 2019)。作為一種非遞歸的變分分解方法,VMD 有效地緩解了經常影響經驗模態分解(EMD)的模態混疊問題。與 ICA 或主成分分析(PCA)不同,后者通常需要預設獨立成分或主成分的數量,VMD 能根據信號特征自適應確定模型函數的數量。與假定常頻率成分的傅里葉變換不同,VMD 可以通過解決變分模型處理非線性/非平穩數據。這些優勢使得 VMD 在我們分解需求中尤其有效。
在滑坡位移預測中,并非所有的時間特征都具有相同的重要性;通常,快速位移變化期間的特征比穩定期的特征更為關鍵。總體目標是生成 CNN-Attention 卷積層輸出的通道注意力權重,這可以增強重要通道的特征表示,幫助推導與季節性項相關的注意力權重映射結果。因此,可以進行并實現可解釋性的分析。注意力機制的本質是為不同特征分配權重,從而突出它們的重要性。由于 CNN 無法捕捉時間序列信息的雙向連接,我們結合了注意力機制,以進一步基于 CNN 網絡提取時間特征。CNN-Attention 層通過首先將輸入特征序列與一維卷積核進行卷積,形成矩陣。然后,對該卷積輸出進行全局平均池化,生成一個新的特征向量,表示每個通道對特征提取的影響。該全局池化向量隨后通過共享的多層感知機(MLP)獲得通道權重。這些權重通過 Sigmoid 函數激活,生成最終的注意力權重矩陣,反映每個通道的重要性。然后,這個注意力矩陣與原始輸入時間序列矩陣進行加權相乘,以增強輸入特征。通過這種 CNN-Attention 層處理過程,重要特征被放大,而不重要的特征則被抑制,從而提高了對相關信息的響應。使用機器學習模型進行滑坡變形預測已成為巖土工程和遙感領域的重要進展(Tehrani 等, 2022;Zhou 等, 2022a;Zhang 等, 2021a)。
5.3 CNN-Attention模型特征權重的特點
大多數使用深度學習進行滑坡位移預測的模型通常被認為是“黑箱”模型,缺乏可解釋性。這些模型的低可解釋性導致滑坡預測模型存在可靠性差、高數據依賴性以及模型調優和參數調整困難等問題。為了解決這些問題,我們的研究將注意力權重融入CNN-Attention模塊,以增強模型的可解釋性和透明性。如圖16所示,我們通過生成注意力熱圖來揭示CNN-Attention模型在預測滑坡運動學時特征權重的特點。輸入特征包括降水量、RWL和歷史滑坡位移。時間戳t表示當前時刻的三個數據集的特征權重,而時間戳t?1表示前一個時間點的特征權重,類似于時間戳t?n。橫軸表示輸入數據的時間戳,縱軸表示該時間戳與歷史時刻之間的延遲。這些權重表示輸入序列中每個時間戳在預測滑坡位移時的相對重要性。權重越大,說明該時間戳及其對應的影響因素的相對重要性越大。
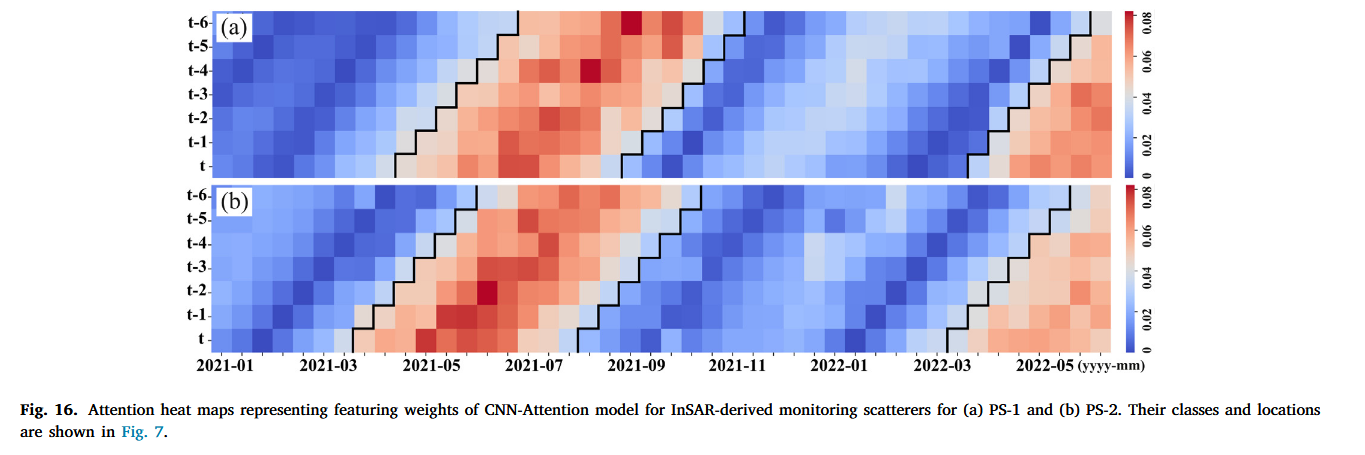
位于xinpu滑坡體前緣的散射點PS-1和PS-2,受降水量和RWL波動的顯著影響。這兩個點被選中進行進一步的注意力權重分析,以闡明觸發因素與滑坡變形模式之間的動態相互作用。對于PS-1和PS-2這兩個具有快速運動的點,我們觀察到從4月到8月期間注意力權重大,恰好與RWL大幅下降和降水量增加的時段重合,這兩個因素是滑坡活動的主要驅動因素。隨著7月之后環境條件的穩定,這些權重隨之上升和下降,突顯了RWL和降水波動對變形動態的影響。我們的研究還分析了每個時間戳前六個歷史時刻,以評估歷史因素對當前滑坡位移的影響。結果證實,觸發因素的歷史時刻對當前滑坡位移有影響,這表明滑坡位移預測涉及復雜的時間序列分析,而不僅僅是簡單的回歸分析。CNN-Attention機制有效捕捉了這種潛在的關聯,為理解滑坡變形的時序動態提供了更深入的洞察,并增強了深度學習模型的可解釋性。這一理解對于全面分析滑坡行為至關重要。類似的方法也可以應用于其他滑坡案例,通過深度學習預測位移時間序列,更好地揭示建模過程中的觸發因素的重要性。
6. 結論
本研究通過基于MT-InSAR觀測數據的深度學習方法解決了滑坡位移預測的復雜問題,提出了一種具有可解釋性的預測模型。為了提高預測的準確性和可解釋性,我們提出了一種耦合CNN-Attention-BiGRU模型,并將其應用于新浦地區的滑坡位移預測。CNN模型中的卷積和池化操作有效地學習了多變量因素的特征,而通道注意力機制增強了時間特征的提取。隨后,BiGRU模型利用歷史信息實現了更準確的滑坡位移預測。實驗結果表明,我們提出的模型在與其他方法的比較中表現更好,具有更高的系數,證明其在滑坡位移預測中的可靠性。
CNN-Attention機制提供的可解釋結果表明,觸發因素與滑坡變形之間的動態關系可以被突出顯示,并且在4月至8月期間,位移迅速變化區域的散射點所受的影響因素具有較高的相對重要性。這一時期恰逢RWL和降水量的顯著波動,表明這些因素對快速滑坡位移有重要影響。此外,該機制還揭示了歷史影響因素,如過去的降水量和RWL,也對當前的位移有顯著影響,突顯了歷史數據和當前數據之間的時間關聯。
總體而言,我們的方法在預測滑坡運動時具有良好的遷移性、可解釋性和穩健性,優于傳統的預測方法,并且可應用于其他類似的災害案例,具有廣泛的深度學習多學科災害風險減緩應用前景。



)











繪制車輛運動軌跡(仿高德))



