一、串口通信/協議
(一)串口通信簡介
串口通信是一種通過串行傳輸方式在電子設備之間進行數據交換的通信方式。它通常涉及兩條線(一條用于發送數據,一條用于接收數據),適用于各種設備,從微控制器到計算機等。串口通信的關鍵特點包括:
1.串行傳輸:數據位按照順序一個接一個地傳輸,與并行傳輸相比,節省了引腳和線纜。
2.異步或同步傳輸:串口通信可以是異步的(通過單獨的時鐘信號進行數據同步)或同步的(通過時鐘信號直接同步數據傳輸)。
3.通信速率:串口通信的速率通常以波特率(bps,每秒傳輸的位數)來衡量,典型的速率有9600、19200、38400、115200等。
4.簡單性和廣泛應用:串口通信協議相對簡單,因此在許多嵌入式系統、傳感器和計算機外圍設備中廣泛使用。
5.標準和協議:常見的串口標準包括RS-232、RS-485等,每種標準有特定的電氣特性和通信協議。
6.通信模式:通信可以是單向的(如僅發送或僅接收),也可以是雙向的(可以發送和接收數據)。
(二)通信模式(數據傳輸方式)
1、串行通信與并行通信
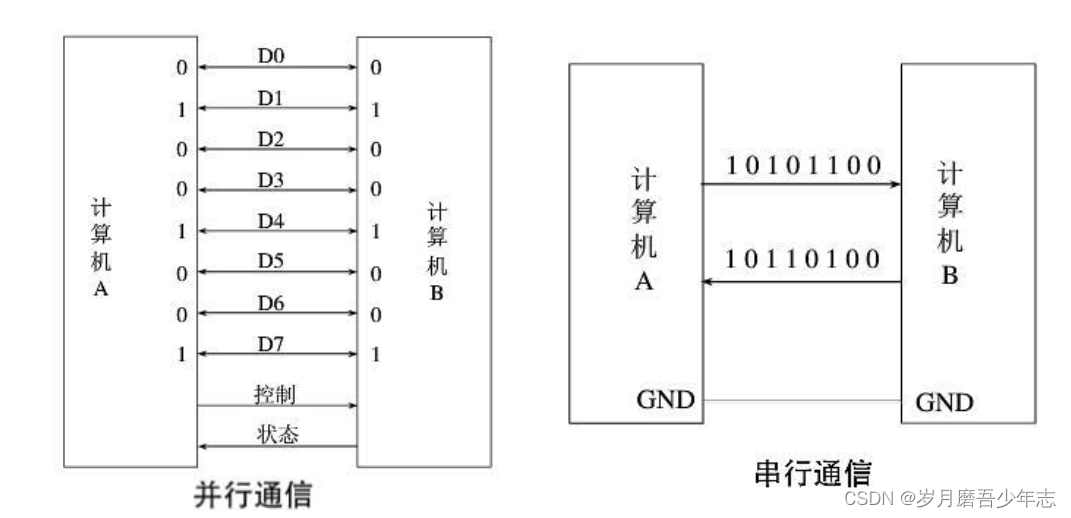
串行通信和并行通信是兩種數據傳輸方式,它們有著明顯的區別:
串行通信:
? 定義:串行通信是一種逐位地傳輸數據的方式,數據位按照順序一個接一個地傳輸。
??傳輸方式:使用單條線路傳輸數據,一般包括發送線(TX)和接收線(RX)。
? 優點:相比并行通信,串行通信可以減少線路和引腳數量,降低成本和復雜度。
? 典型應用:常見于長距離通信和嵌入式系統,如串口通信(RS-232、RS-485)、USB等。
并行通信:
? 定義:并行通信是同時傳輸多個數據位的方式,每個數據位使用一個獨立的信號線路。
? 傳輸方式:通常使用多個并列的線路,每個線路傳輸一個數據位,同時進行。
? 優點:傳輸速度快,適合于需要高速數據傳輸的應用。
? 缺點:需要更多的線路和引腳,因此成本較高且布線復雜。
? 典型應用:在計算機內部的數據總線(如PCI總線)、內存訪問等地方常見并行通信。
可以將兩種數據傳輸方式理解為“串聯”與“并聯”。
2、單工、半雙工、全雙工通信

單工、半雙工和全雙工通信是描述數據在通信中傳輸方向和能力的術語.單工通信適合于單向傳輸、無需反饋的應用;半雙工通信適合于雙向通信但不能同時進行;全雙工通信適合需要同時雙向傳輸數據的場合。
單工通信:
??定義:單工通信是指數據只能在一個方向上傳輸的通信方式。發送方只能發送數據,接收方只能接收數據,不能同時發送和接收。
? 特點:通信是單向的,類似于單行道,信息只能在一個方向上流動。
? 應用場景:常見于廣播和一些簡單的傳感器網絡中,如無線電廣播、鍵盤到計算機的數據傳輸等。
半雙工通信:
? 定義:半雙工通信允許數據在兩個方向上傳輸,但不能同時進行。在某一時刻,通信設備要么發送數據,要么接收數據。
? 特點:通信設備在發送數據時不能同時接收,反之亦然。類似于單行道,但是可以在兩個方向上切換流量。
? 應用場景:廣泛應用于無線電對講機、對講電話以及以太網的半雙工模式。
全雙工通信:
??定義:全雙工通信允許數據在兩個方向上同時進行傳輸,發送和接收可以同時進行。
? 特點:通信設備可以同時發送和接收數據,就像雙車道道路一樣,流量可以在兩個方向上同時流動。
? 應用場景:常見于電話通信、以太網等需要同時雙向傳輸數據的場合,如互聯網視頻會議、數據中心的服務器通信等。
(三)串口協議和RS-232標準介紹
1、串口協議
串口協議通常指的是一種通過串行通信進行數據傳輸的通信協議。串口協議是通過串行通信傳輸數據的一種約定和規范,通常包括以下幾個方面:
(1)數據格式:定義了數據位(通常為7或8位)、校驗位(可選)、停止位(通常為1或2位)等格式。這些位組合在一起形成一個完整的數據幀。
(2)波特率:指數據傳輸速率,單位為波特(bps)。常見的波特率有9600、19200、38400、115200等。
(3)通信協議:指定了數據如何被解釋、傳輸和接收。常見的協議包括ASCII碼、Modbus、SPI等,具體的選擇取決于應用的需求和設備的兼容性。
(4)硬件接口:定義了物理連接和電氣特性,如信號電平、線路配置(如RS-232、RS-485)、引腳定義等。
2、RS-232標準
RS-232是最早的一種串行通信標準,定義了數據傳輸的電氣特性和信號架構。它具有以下特點:
(1)電氣特性:RS-232標準規定了發送和接收設備之間的電平范圍。典型的RS-232電平為正負12V,用于表示邏輯1和邏輯0。
(2)連接方式:RS-232通常使用DB-9或DB-25連接器,分別具有9個或25個引腳,用于連接串口設備。
(3)信號線:RS-232定義了多條信號線,包括發送數據(TX)、接收數據(RX)、數據就緒(DSR)、數據載波檢測(DCD)、請求發送(RTS)和清除發送(CTS)等。
(4)應用范圍:RS-232廣泛應用于計算機和外圍設備之間的通信,如調制解調器、終端設備、打印機等。
盡管RS-232標準已經存在多年,但隨著技術的進步,如USB和以太網的普及,RS-232在某些領域的使用逐漸減少。然而,它仍然是許多傳統設備中不可或缺的通信接口之一,且在工業控制、測量設備等領域仍然廣泛使用。
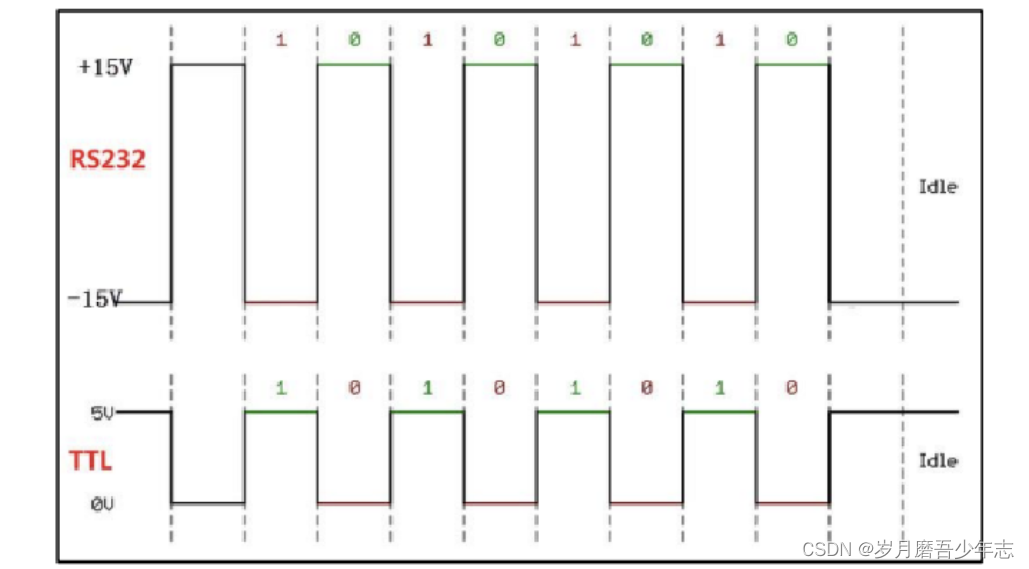
3、RS232電平與TTL電平的區別
RS-232和TTL電平在電氣特性、應用場景和連接方式上有很大的不同。RS-232適用于長距離和抗干擾要求較高的通信環境,而TTL電平適合于數字電路和低功耗設備之間的短距離通信。選擇合適的電平標準取決于具體的應用需求,包括通信距離、抗干擾能力、功耗和設備兼容性等因素。
RS-232電平
(1)RS-232標準定義了發送和接收設備之間的電平范圍,典型的RS-232電平為正負12V。邏輯1通常對應于負電平(-3V 至 -15V之間),邏輯0對應于正電平(+3V 至 +15V之間)。這種電平范圍使得RS-232在長距離傳輸和抗干擾能力方面表現優秀。
(2)RS-232通常用于需要較長傳輸距離(最長可達50英尺)和較高抗干擾能力的應用,如計算機串口、調制解調器、終端設備等。它適合于工業環境和長距離通信需求,但其電平范圍較廣,需要較多的電氣和電子元件支持。
(3)RS-232通常使用DB-9或DB-25連接器,這些連接器包含多個引腳,用于傳輸數據及控制信號。
TTL電平
(1)TTL(Transistor-Transistor Logic)電平是指通常在邏輯電路中使用的電平標準,典型的TTL電平是0V到5V。邏輯1通常為高電平(約3.3V至5V),邏輯0為低電平(約0V至0.8V),這種電平適合數字電路和集成電路之間的直接通信。
(2)TTL電平通常用于短距離通信和數字電路之間的通信,如微控制器與傳感器之間的串行通信、邏輯電路板之間的通信等。由于其電平范圍較窄,適合于低功耗應用和簡化的通信接口
(3)TTL電平通常使用簡單的單針或雙針連接器,如用于Arduino等開發板的數字輸入輸出引腳。
(四)CH340(串口)
CH340模塊是一種USB轉串口芯片,能夠將USB接口轉換為異步串口通信接口,支持RS-232和TTL電平標準,適用于單片機開發、嵌入式系統及消費電子產品中,提供穩定的數據傳輸和低功耗解決方案。
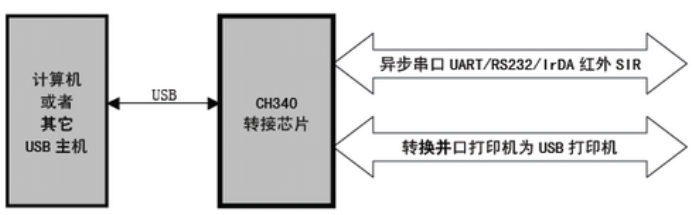

USB/TTL轉232
CH340是一個USB總線的轉接芯片,實現USB轉串口、USB轉IrDA紅外或者USB轉打印口。為了增加串口通訊的遠距離傳輸及抗干擾能力,RS-232標準使用-15V表示邏輯1,+15V 表示邏輯0。常常會使用MH340芯片對USB/TTL與RS- 232電平的信號進行轉換。
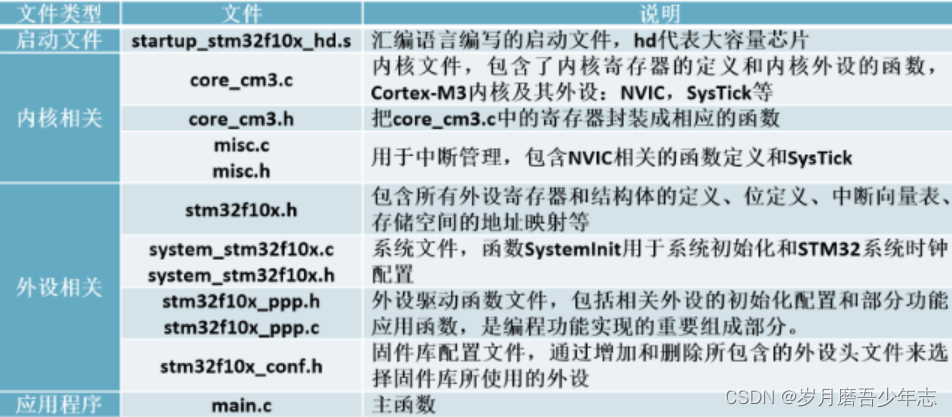
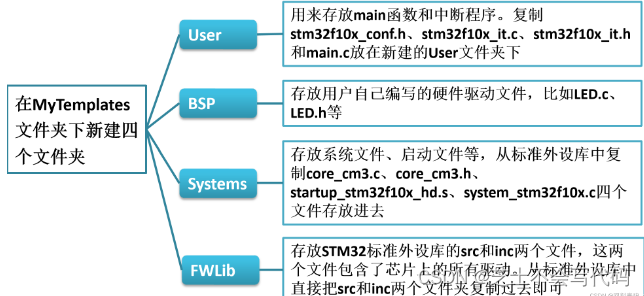
二、標準庫開發
為了解決不同芯片廠商生產的基于Cortex內核的微處理器在軟件上的兼容問題,ARM公司與眾多芯片和軟件廠商共同制定了CMSIS標準(Cortex Microcontroller Software Interface Standard,Cortex微控制器軟件接口標準),意在將所有Cortex芯片廠商產品的軟件接口標準化。
固件庫:
![]()
安裝步驟:
![]()
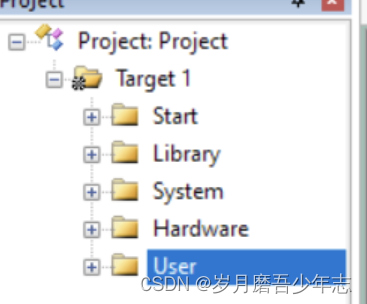
導入后列表:
![]()
三、標準庫點燈
(一)配置GPIO函數:
//1.打開APB2時鐘(不懂為什么第一步是這個的可以參考我上一篇博客)RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//2.GPIO引腳設置GPIO_InitTypeDef GPIO_InitStructure;//GPIO結構體定義GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//設置GPIO功能模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//設置作用GPIO引腳GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//配置GPIO速度GPIO_Init(GPIOB, &GPIO_InitStructure);//如果你設置的引腳是PB9,()內分別為GPIOB,&你定義的結構體//3.GPIO輸出電平設置GPIO_ResetBits(GPIOB, GPIO_Pin_9);//低電平,點亮LED燈(因為我們的LED燈正極接電源側,負極接引腳PB9,要使LED亮需要使PB9輸出低電平導通)GPIO_SetBits(GPIOB, GPIO_Pin_9);//高電平,LED燈不亮接線圖:

(二)完整點燈代碼:
?
#include "stm32f10x.h" ? ? ? ? ? ? ? ? // Device header
#include "Delay.h" ? ?
?
int main(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //開啟GPIOA的時鐘//使用各個外設前必須開啟時鐘,否則對外設的操作無效/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure; //定義結構體變量GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,賦值為推挽輸出模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO引腳,賦值為第0號引腳GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,賦值為50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //將賦值后的構體變量傳遞給GPIO_Init函數//函數內部會自動根據結構體的參數配置相應寄存器//實現GPIOA的初始化/*主循環,循環體內的代碼會一直循環執行*/while (1){/*設置PA0引腳的高低電平,實現LED閃爍,下面展示3種方法*//*方法1:GPIO_ResetBits設置低電平,GPIO_SetBits設置高電平*/GPIO_ResetBits(GPIOA, GPIO_Pin_0); //將PA0引腳設置為低電平Delay_ms(500); //延時500msGPIO_SetBits(GPIOA, GPIO_Pin_0); //將PA0引腳設置為高電平Delay_ms(500); //延時500ms/*方法2:GPIO_WriteBit設置低/高電平,由Bit_RESET/Bit_SET指定*/GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET); //將PA0引腳設置為低電平Delay_ms(500); //延時500msGPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET); //將PA0引腳設置為高電平Delay_ms(500); //延時500ms/*方法3:GPIO_WriteBit設置低/高電平,由數據0/1指定,數據需要強轉為BitAction類型*/GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)0); //將PA0引腳設置為低電平Delay_ms(500); //延時500msGPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)1); //將PA0引腳設置為高電平Delay_ms(500); //延時500ms}
}?四、標準庫串口通信實現
LED GPIO 初始化:
#include "stm32f10x.h"
#include "OLED_Font.h"
?
/*引腳配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))
?
/*引腳初始化*/
void OLED_I2C_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOB, &GPIO_InitStructure);OLED_W_SCL(1);OLED_W_SDA(1);
}
?
/*** @brief I2C開始* @param 無* @retval 無*/
void OLED_I2C_Start(void)
{OLED_W_SDA(1);OLED_W_SCL(1);OLED_W_SDA(0);OLED_W_SCL(0);
}
?
/*** @brief I2C停止* @param 無* @retval 無*/
void OLED_I2C_Stop(void)
{OLED_W_SDA(0);OLED_W_SCL(1);OLED_W_SDA(1);
}
?
/*** @brief I2C發送一個字節* @param Byte 要發送的一個字節* @retval 無*/
void OLED_I2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i++){OLED_W_SDA(Byte & (0x80 >> i));OLED_W_SCL(1);OLED_W_SCL(0);}OLED_W_SCL(1); //額外的一個時鐘,不處理應答信號OLED_W_SCL(0);
}
?
/*** @brief OLED寫命令* @param Command 要寫入的命令* @retval 無*/
void OLED_WriteCommand(uint8_t Command)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //從機地址OLED_I2C_SendByte(0x00); //寫命令OLED_I2C_SendByte(Command); OLED_I2C_Stop();
}
?
/*** @brief OLED寫數據* @param Data 要寫入的數據* @retval 無*/
void OLED_WriteData(uint8_t Data)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //從機地址OLED_I2C_SendByte(0x40); //寫數據OLED_I2C_SendByte(Data);OLED_I2C_Stop();
}
?
/*** @brief OLED設置光標位置* @param Y 以左上角為原點,向下方向的坐標,范圍:0~7* @param X 以左上角為原點,向右方向的坐標,范圍:0~127* @retval 無*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{OLED_WriteCommand(0xB0 | Y); //設置Y位置OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //設置X位置高4位OLED_WriteCommand(0x00 | (X & 0x0F)); //設置X位置低4位
}
?
/*** @brief OLED清屏* @param 無* @retval 無*/
void OLED_Clear(void)
{ ?uint8_t i, j;for (j = 0; j < 8; j++){OLED_SetCursor(j, 0);for(i = 0; i < 128; i++){OLED_WriteData(0x00);}}
}
?
/*** @brief OLED顯示一個字符* @param Line 行位置,范圍:1~4* @param Column 列位置,范圍:1~16* @param Char 要顯示的一個字符,范圍:ASCII可見字符* @retval 無*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{ ? ? uint8_t i;OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //設置光標位置在上半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i]); //顯示上半部分內容}OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //設置光標位置在下半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //顯示下半部分內容}
}
?
/*** @brief OLED顯示字符串* @param Line 起始行位置,范圍:1~4* @param Column 起始列位置,范圍:1~16* @param String 要顯示的字符串,范圍:ASCII可見字符* @retval 無*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i++){OLED_ShowChar(Line, Column + i, String[i]);}
}
?
/*** @brief OLED次方函數* @retval 返回值等于X的Y次方*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y--){Result *= X;}return Result;
}
?
/*** @brief OLED顯示數字(十進制,正數)* @param Line 起始行位置,范圍:1~4* @param Column 起始列位置,范圍:1~16* @param Number 要顯示的數字,范圍:0~4294967295* @param Length 要顯示數字的長度,范圍:1~10* @retval 無*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}
?
/*** @brief OLED顯示數字(十進制,帶符號數)* @param Line 起始行位置,范圍:1~4* @param Column 起始列位置,范圍:1~16* @param Number 要顯示的數字,范圍:-2147483648~2147483647* @param Length 要顯示數字的長度,范圍:1~10* @retval 無*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{uint8_t i;uint32_t Number1;if (Number >= 0){OLED_ShowChar(Line, Column, '+');Number1 = Number;}else{OLED_ShowChar(Line, Column, '-');Number1 = -Number;}for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}
?
/*** @brief OLED顯示數字(十六進制,正數)* @param Line 起始行位置,范圍:1~4* @param Column 起始列位置,范圍:1~16* @param Number 要顯示的數字,范圍:0~0xFFFFFFFF* @param Length 要顯示數字的長度,范圍:1~8* @retval 無*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i, SingleNumber;for (i = 0; i < Length; i++) {SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;if (SingleNumber < 10){OLED_ShowChar(Line, Column + i, SingleNumber + '0');}else{OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');}}
}
?
/*** @brief OLED顯示數字(二進制,正數)* @param Line 起始行位置,范圍:1~4* @param Column 起始列位置,范圍:1~16* @param Number 要顯示的數字,范圍:0~1111 1111 1111 1111* @param Length 要顯示數字的長度,范圍:1~16* @retval 無*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');}
}
?
/*** @brief OLED初始化* @param 無* @retval 無*/
void OLED_Init(void)
{uint32_t i, j;for (i = 0; i < 1000; i++) //上電延時{for (j = 0; j < 1000; j++);}OLED_I2C_Init(); //端口初始化OLED_WriteCommand(0xAE); //關閉顯示OLED_WriteCommand(0xD5); //設置顯示時鐘分頻比/振蕩器頻率OLED_WriteCommand(0x80);OLED_WriteCommand(0xA8); //設置多路復用率OLED_WriteCommand(0x3F);OLED_WriteCommand(0xD3); //設置顯示偏移OLED_WriteCommand(0x00);OLED_WriteCommand(0x40); //設置顯示開始行OLED_WriteCommand(0xA1); //設置左右方向,0xA1正常 0xA0左右反置OLED_WriteCommand(0xC8); //設置上下方向,0xC8正常 0xC0上下反置
?OLED_WriteCommand(0xDA); //設置COM引腳硬件配置OLED_WriteCommand(0x12);OLED_WriteCommand(0x81); //設置對比度控制OLED_WriteCommand(0xCF);
?OLED_WriteCommand(0xD9); //設置預充電周期OLED_WriteCommand(0xF1);
?OLED_WriteCommand(0xDB); //設置VCOMH取消選擇級別OLED_WriteCommand(0x30);
?OLED_WriteCommand(0xA4); //設置整個顯示打開/關閉
?OLED_WriteCommand(0xA6); //設置正常/倒轉顯示
?OLED_WriteCommand(0x8D); //設置充電泵OLED_WriteCommand(0x14);
?OLED_WriteCommand(0xAF); //開啟顯示OLED_Clear(); //OLED清屏
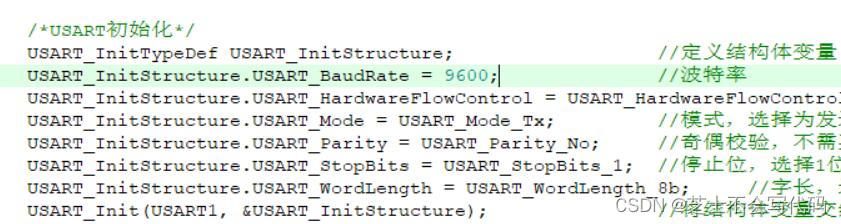
}波特率配置:
![]()
#include "stm32f10x.h" ? ? ? ? ? ? ? ? // Device header
#include <stdio.h>
#include <stdarg.h>
?
/*** 函 ? 數:串口初始化* 參 ? 數:無* 返 回 值:無*/
void Serial_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //開啟USART1的時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //開啟GPIOA的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //將PA9引腳初始化為復用推挽輸出/*USART初始化*/USART_InitTypeDef USART_InitStructure; //定義結構體變量USART_InitStructure.USART_BaudRate = 9600; //波特率USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要USART_InitStructure.USART_Mode = USART_Mode_Tx; //模式,選擇為發送模式USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校驗,不需要USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,選擇1位USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字長,選擇8位USART_Init(USART1, &USART_InitStructure); //將結構體變量交給USART_Init,配置USART1/*USART使能*/USART_Cmd(USART1, ENABLE); //使能USART1,串口開始運行
}
?
/*** 函 ? 數:串口發送一個字節* 參 ? 數:Byte 要發送的一個字節* 返 回 值:無*/
void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART1, Byte); //將字節數據寫入數據寄存器,寫入后USART自動生成時序波形while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待發送完成/*下次寫入數據寄存器會自動清除發送完成標志位,故此循環后,無需清除標志位*/
}
?
/*** 函 ? 數:串口發送一個數組* 參 ? 數:Array 要發送數組的首地址* 參 ? 數:Length 要發送數組的長度* 返 回 值:無*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{uint16_t i;for (i = 0; i < Length; i ++) //遍歷數組{Serial_SendByte(Array[i]); //依次調用Serial_SendByte發送每個字節數據}
}
?
/*** 函 ? 數:串口發送一個字符串* 參 ? 數:String 要發送字符串的首地址* 返 回 值:無*/
void Serial_SendString(char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i ++)//遍歷字符數組(字符串),遇到字符串結束標志位后停止{Serial_SendByte(String[i]); //依次調用Serial_SendByte發送每個字節數據}
}
?
/*** 函 ? 數:次方函數(內部使用)* 返 回 值:返回值等于X的Y次方*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1; //設置結果初值為1while (Y --) //執行Y次{Result *= X; //將X累乘到結果}return Result;
}
?
/*** 函 ? 數:串口發送數字* 參 ? 數:Number 要發送的數字,范圍:0~4294967295* 參 ? 數:Length 要發送數字的長度,范圍:0~10* 返 回 值:無*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i ++) //根據數字長度遍歷數字的每一位{Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次調用Serial_SendByte發送每位數字}
}
?
/*** 函 ? 數:使用printf需要重定向的底層函數* 參 ? 數:保持原始格式即可,無需變動* 返 回 值:保持原始格式即可,無需變動*/
int fputc(int ch, FILE *f)
{Serial_SendByte(ch); //將printf的底層重定向到自己的發送字節函數return ch;
}
?
/*** 函 ? 數:自己封裝的prinf函數* 參 ? 數:format 格式化字符串* 參 ? 數:... 可變的參數列表* 返 回 值:無*/
void Serial_Printf(char *format, ...)
{char String[100]; //定義字符數組va_list arg; //定義可變參數列表數據類型的變量argva_start(arg, format); //從format開始,接收參數列表到arg變量vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和參數列表到字符數組中va_end(arg); //結束變量argSerial_SendString(String); //串口發送字符數組(字符串)
}主函數代碼:
#include "stm32f10x.h" ? ? ? ? ? ? ? ? // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
?
int main(void)
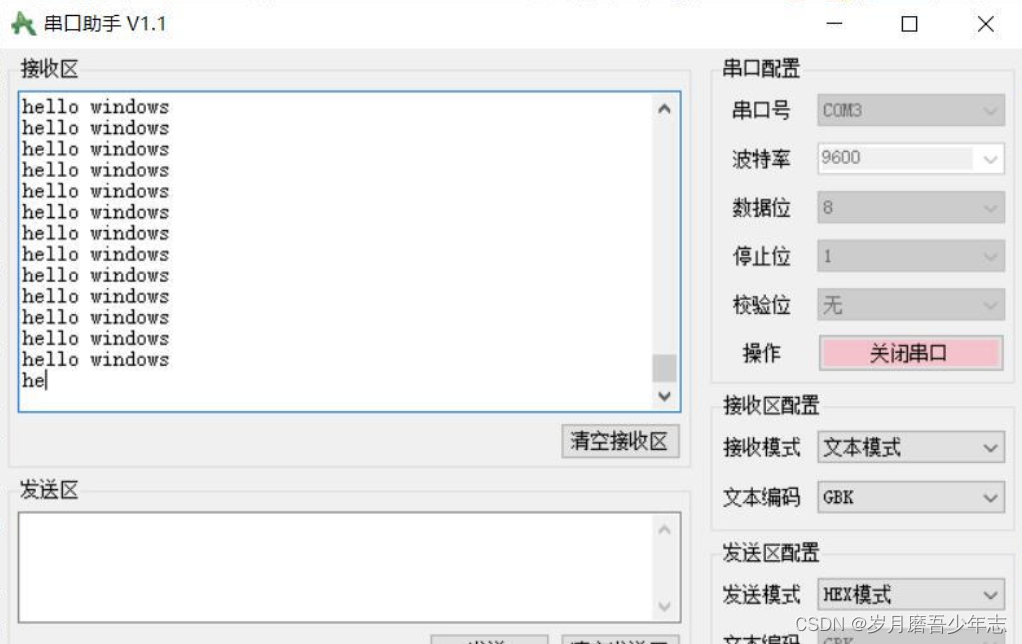
{/*模塊初始化*/OLED_Init(); //OLED初始化Serial_Init(); //串口初始化/*串口基本函數*/Serial_SendByte(0x41); //串口發送一個字節數據0x41uint8_t MyArray[] = {0x42, 0x43, 0x44, 0x45}; //定義數組Serial_SendArray(MyArray, 4); //串口發送一個數組//Serial_SendString("hello windows!"); //串口發送字符串Serial_SendNumber(111, 3); //串口發送數字/*下述3種方法可實現printf的效果*//*方法1:直接重定向printf,但printf函數只有一個,此方法不能在多處使用*/printf("\r\nNum2=%d", 222); //串口發送printf打印的格式化字符串//需要重定向fputc函數,并在工程選項里勾選Use MicroLIB/*方法2:使用sprintf打印到字符數組,再用串口發送字符數組,此方法打印到字符數組,之后想怎么處理都可以,可在多處使用*/char String[100]; //定義字符數組sprintf(String, "\r\nNum3=%d", 333);//使用sprintf,把格式化字符串打印到字符數組Serial_SendString(String); //串口發送字符數組(字符串)/*方法3:將sprintf函數封裝起來,實現專用的printf,此方法就是把方法2封裝起來,更加簡潔實用,可在多處使用*/Serial_Printf("\r\nNum4=%d", 444); //串口打印字符串,使用自己封裝的函數實現printf的效果Serial_Printf("\r\n");while (1){Serial_SendString("hello windows");Serial_Printf("\r\n");}
}結果演示:
STM32以查詢方式接收上位機(win10)串口發來的數據,如果接收到“Y”則點亮鏈接到stm32上的一個LED燈;接收到“N”則熄滅LED燈。
代碼演示:
#include "stm32f10x.h" ? ? ? ? ? ? ? ? // Device header
#include <stdio.h>
?
void USART_Config(void)
{
//1.開啟GPIOA和USART1的時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);//2.結構體定義GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;//3.USART設置RX/TX//USART1_TX,默認情況下復用PA9引腳GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//復用推挽輸出GPIO_Init(GPIOA, &GPIO_InitStructure); //USART1_RX,默認情況下復用PA10引腳GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//浮空輸入GPIO_Init(GPIOA, &GPIO_InitStructure); //4.USART1參數配置USART_InitStructure.USART_BaudRate = 9600;//設置波特率為9600USART_InitStructure.USART_WordLength = USART_WordLength_8b; //數據位占8位USART_InitStructure.USART_StopBits = USART_StopBits_1; //1位停止位USART_InitStructure.USART_Parity = USART_Parity_No; //無校驗USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);
?USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);//5.初始化串口1USART_Cmd(USART1, ENABLE); //使能串口1
?
}
?
//重定向c 庫函數printf 到串口,重定向后可使用printf 函數
int fputc(int ch, FILE *f)
{/* 發送一個字節數據到串口 */USART_SendData(USART1, (uint8_t) ch);/* 等待發送完畢 */while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);return (ch);
}
?
///重定向c 庫函數scanf 到串口,重寫向后可使用scanf、getchar 等函數
int fgetc(FILE *f)
{/* 等待串口輸入數據 */while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);return (int)USART_ReceiveData(USART1);
}
?
int main(void)
{USART_Config();//1.開啟GPIOB時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//2.結構體定義GPIO_InitTypeDef GPIO_InitStructure;//3.GPIO配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出GPIO_Init(GPIOA, &GPIO_InitStructure); //4.初始化燈GPIO_SetBits(GPIOA,GPIO_Pin_4);char ch;while(1){printf("請輸入指令:Y亮燈,N滅燈!");ch=getchar();printf("接收到字符:%c\n",ch);switch(ch){case 'N':GPIO_SetBits(GPIOA,GPIO_Pin_4);break;case 'Y':GPIO_ResetBits(GPIOA,GPIO_Pin_4);break;default:break;}// 等待一段時間,以便在串口調試工具中可以看到消息之間的間隔 ?for (uint32_t i = 0; i < 10000000; i++); ? ?} ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
}#include "stm32f10x.h" // Device header
#include "Serial.h"
//操作IO口的三個步驟
//1、使用RCC開啟GPIO時鐘
//2、使用GPIO_Init函數初始化GPIO
//3、使用輸出或輸入函數控制GPIO口
uint8_t KeyNum;
uint8_t RxData;
int main()
{OLED_Init();Serial_Init();GPIO_WriteBit(GPIOA,GPIO_Pin_6,Bit_SET);//將A6口初始化為電平
//GPIO_SetBits(GPIOA,GPIO_Pin_6);另一種初始化函數while(1){if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==SET)//若接收寄存器數據轉到RDR中,則RXNE標志位置一,標志位自動清零{RxData=USART_ReceiveData(USART1);if(RxData=='Y'){GPIO_ResetBits(GPIOA,GPIO_Pin_6);}if(RxData=='N'){GPIO_SetBits(GPIOA,GPIO_Pin_6);}}}
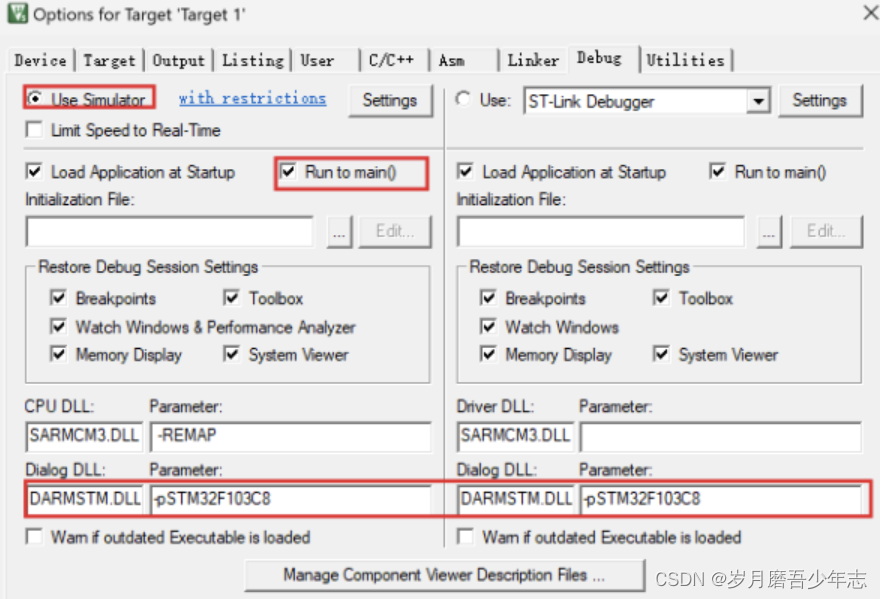
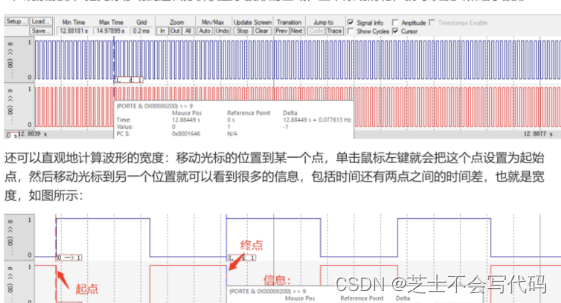
}五、Keil的仿真邏輯分析儀觀察時序波形




備考題庫資料。)














