0.實現效果
左圖為原始點云,右圖為投影到XOY平面上的點云
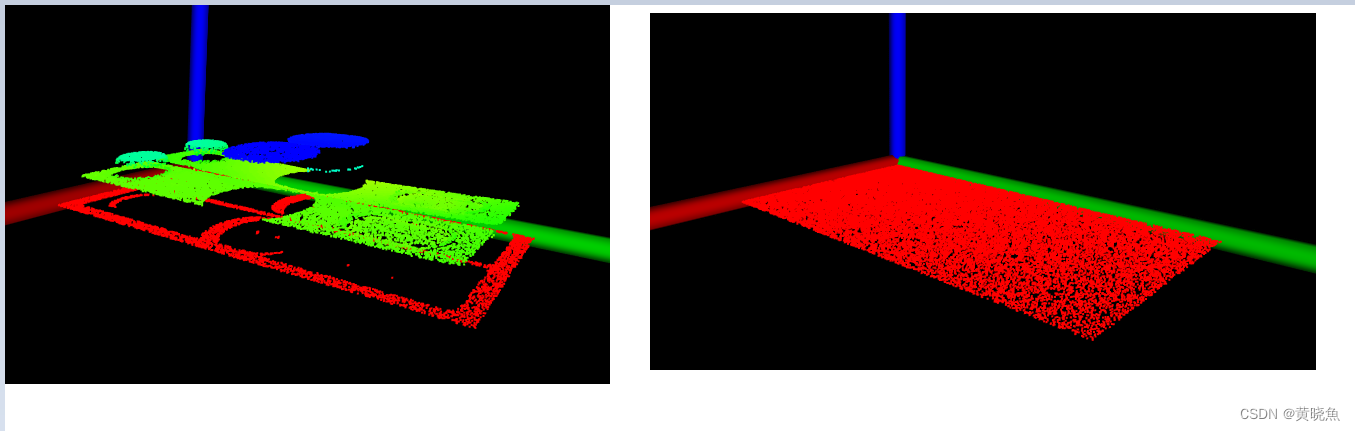
將三維的點云投影到二維平面,方便處理一些二維輪廓方面的計算。
可以投影到空間中任意平面上。
1.算法原理
原理
點云投影是將三維空間中的點云數據映射到一個二維平面上的過程。這通常通過以下步驟實現:
- 確定投影平面:首先,需要確定一個二維平面,這可以通過多種方式實現,例如使用最小二乘法擬合一個平面。
- 計算投影點:對于點云中的每個點,計算其到投影平面的垂直距離,并找到該點在平面上的投影位置。這通常涉及計算點的法向量和投影平面的法向量之間的點積,以及使用這些信息來確定投影點的坐標。
- 生成投影點云:將所有原始點云中的點投影到二維平面上,生成一個二維的點云數據集。
意義
點云投影到平面的操作在多個領域具有重要的應用意義:
- 數據降維:通過將三維點云數據投影到二維平面上,可以顯著降低數據的維度,從而簡化后續的數據處理和分析任務。這有助于減少計算資源的需求,提高處理效率。
- 特征提取:投影操作可以突出點云數據中的某些特征,例如平面特征、邊緣特征等。這些特征在后續的識別、分類和重建等任務中具有重要的應用價值。
- 多傳感器數據融合</



元素和其文本或者屬性)


)





)






