目錄
一、功能概述:代碼能做什么?
二、環境準備:先搭好運行基礎
1. 安裝 Python
2. 安裝 OpenCV 庫
3. 準備圖像文件
三、代碼逐段解析:從基礎到核心
1. 導入 OpenCV 庫
2. 讀取圖像文件
3. 模板圖像旋轉:處理多角度匹配
4. 獲取模板尺寸:為標記匹配區域做準備
5. 模板匹配:核心算法執行
函數參數解析:
返回值res:
6. 提取最優匹配位置
7. 繪制匹配框并保存結果
8. 顯示結果并釋放資源
四、關鍵優化:讓匹配更精準、更通用
1. 遍歷所有旋轉角度的模板
2. 設定相似度閾值,過濾誤檢
3. 處理灰度圖像,提高效率
五、常見問題與解決方案
六、總結與拓展
拓展學習方向:
在計算機視覺領域,模板匹配是一項基礎且實用的技術,它能夠在一幅大圖像中快速定位與模板圖像相似的區域。本文將基于一段完整的 OpenCV 代碼,詳細講解如何實現帶旋轉處理的模板匹配,幫助新手快速掌握核心思路與實操技巧。
一、功能概述:代碼能做什么?
先明確這段代碼的核心作用:
- 讀取原始圖像(image.jpg)和模板圖像(template.jpg);
- 將模板圖像順時針旋轉 3 次(每次 90°),得到 0°、90°、180°、270° 四種角度的模板;
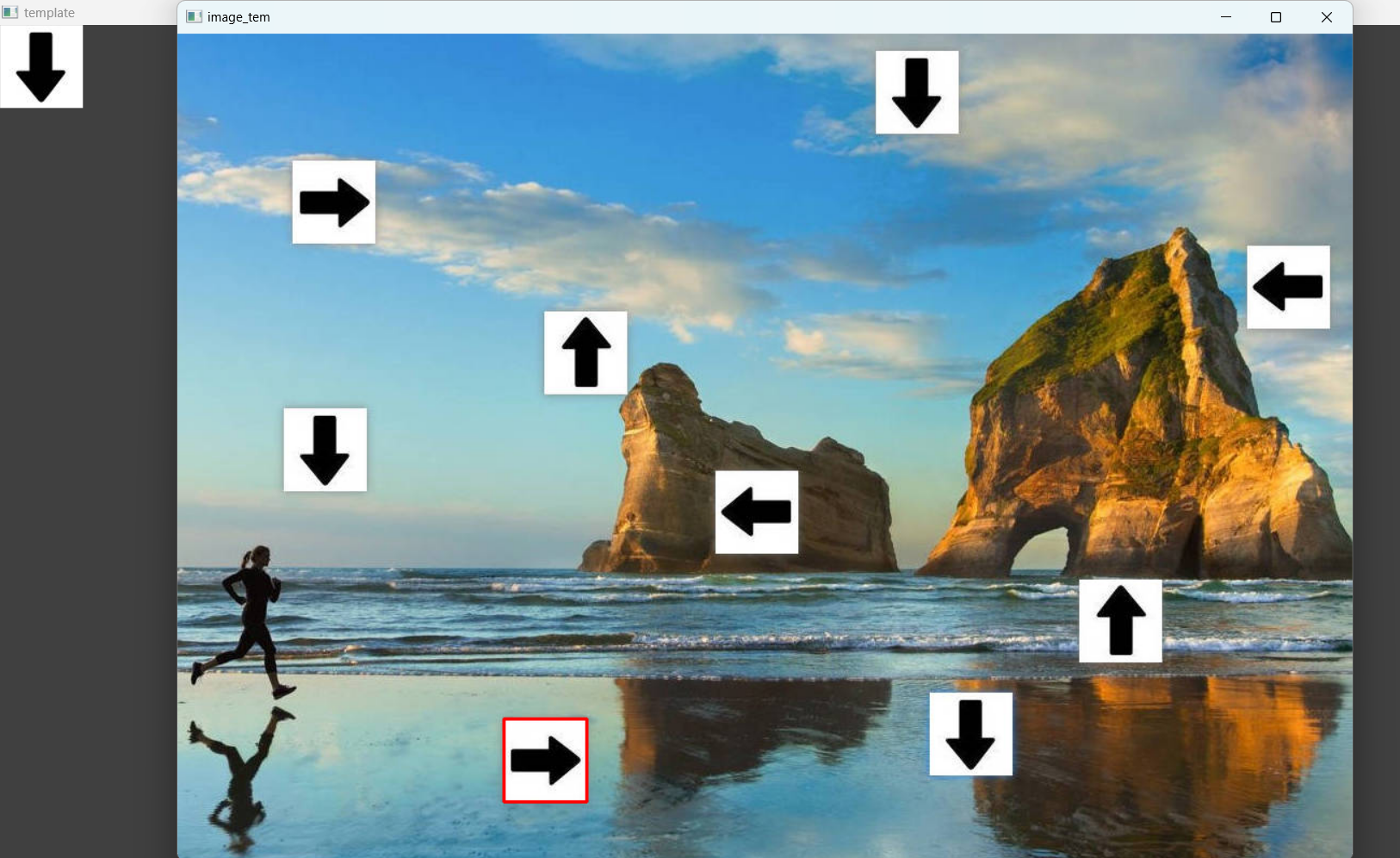
- 以旋轉 270° 的模板為例,在原始圖像中匹配相似區域;
- 用紅色矩形框標記匹配到的區域,保存結果并顯示窗口;
- 支持按任意鍵關閉窗口,釋放資源。
二、環境準備:先搭好運行基礎
在執行代碼前,需要確保你的開發環境已配置好相關依賴,步驟如下:
1. 安裝 Python
推薦使用 Python 3.7~3.11 版本(OpenCV 對新版本 Python 兼容性更穩定),可從Python 官網下載安裝,記得勾選 “Add Python to PATH”。
2. 安裝 OpenCV 庫
打開命令行(Windows 用 CMD 或 PowerShell,Mac/Linux 用終端),執行以下命令:
pip install opencv-python # 核心庫,約80MB# 若需要額外功能(如視頻處理),可安裝完整版:pip install opencv-contrib-python3. 準備圖像文件
將原始圖像命名為image.jpg、模板圖像命名為template.jpg,并與你的 Python 代碼文件放在同一文件夾中(避免路徑錯誤)。
- 建議原始圖像尺寸大于模板圖像(否則無法匹配);
- 模板圖像盡量選擇 “特征明顯” 的區域(如特定 logo、物體邊緣),減少干擾。
三、代碼逐段解析:從基礎到核心
接下來逐行拆解代碼,理解每一步的作用和背后的邏輯。
1. 導入 OpenCV 庫
import cv2這是所有 OpenCV 代碼的起點,cv2是 OpenCV 在 Python 中的庫名,導入后才能調用其提供的圖像讀取、旋轉、匹配等函數。
2. 讀取圖像文件
image = cv2.imread('image.jpg')template = cv2.imread('template.jpg')
cv2.imshow('template',template)
cv2.waitKey(0)- cv2.imread(path):核心函數,用于讀取圖像文件,返回numpy.ndarray類型的圖像矩陣(像素值存儲在矩陣中)。
- 注意:OpenCV 讀取圖像時,默認以BGR 格式(藍、綠、紅)存儲,而 Python 其他圖像庫(如 PIL)通常用 RGB 格式,若后續需跨庫處理需注意格式轉換。
- 常見問題:若變量為None,說明圖像讀取失敗,需檢查文件路徑是否正確、文件是否損壞(如后綴名是否真為.jpg)。
3. 模板圖像旋轉:處理多角度匹配
template_90_1 = cv2.rotate(template, cv2.ROTATE_90_CLOCKWISE) # 順時針旋轉90°template_90_2 = cv2.rotate(template_90_1, cv2.ROTATE_90_CLOCKWISE) # 再轉90°(共180°)template_90_3 = cv2.rotate(template_90_2, cv2.ROTATE_90_CLOCKWISE) # 再轉90°(共270°)- cv2.rotate(src, rotateCode):專門用于圖像旋轉的函數,無需手動計算旋轉矩陣,簡潔高效。
- 旋轉參數說明:
-
- cv2.ROTATE_90_CLOCKWISE:順時針旋轉 90°;
-
- cv2.ROTATE_90_COUNTERCLOCKWISE:逆時針旋轉 90°;
-
- cv2.ROTATE_180:直接旋轉 180°(等價于兩次順時針 90°)。
- 為什么要旋轉模板?
實際場景中,模板可能在原始圖像中呈現不同角度(如 logo 傾斜),僅用原始模板會匹配失敗,因此需要生成多角度模板覆蓋更多情況。
4. 獲取模板尺寸:為標記匹配區域做準備
h, w = template_90_3.shape[:2]- image.shape:返回圖像的尺寸信息,格式為(高度, 寬度, 通道數)(如(480, 640, 3)表示 480 行、640 列的 3 通道彩色圖)。
- shape[:2]:取前兩個值(高度h和寬度w),因為后續繪制矩形需要知道模板的大小 —— 匹配區域的 “左上角坐標” 加上模板的 “寬高”,才能得到 “右下角坐標”。
5. 模板匹配:核心算法執行
res = cv2.matchTemplate(image, template_90_3, cv2.TM_CCORR_NORMED)這是整個代碼的核心步驟,負責在原始圖像中搜索與模板最相似的區域。
函數參數解析:
- image:原始圖像(需大于模板圖像);
- template_90_3:待匹配的模板圖像(此處用旋轉 270° 的模板);
- cv2.TM_CCORR_NORMED:匹配算法類型(歸一化相關系數匹配),常用算法對比見下表:
| 算法類型 | 特點 | 適用場景 |
| cv2.TM_SQDIFF | 平方差匹配,值越小越相似 | 無噪聲、高相似度場景 |
| cv2.TM_CCORR | 相關匹配,值越大越相似 | 亮度一致的場景 |
| cv2.TM_CCORR_NORMED | 歸一化相關匹配,值越接近 1 越相似 | 亮度變化大的場景(推薦) |
| cv2.TM_CCOEFF | 相關系數匹配,值越接近 1 越相似 | 整體對比度差異大的場景 |
返回值res:
res是一個 “匹配結果矩陣”,其尺寸為(image_h - template_h + 1, image_w - template_w + 1),每個元素代表 “以該點為左上角時,模板與原始圖像區域的相似度”。
6. 提取最優匹配位置
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)top_left = max_locbottom_right = (top_left[0] + w, top_left[1] + h)- cv2.minMaxLoc(res):從匹配結果矩陣res中提取 4 個關鍵值:
-
- min_val:最小相似度值;
-
- max_val:最大相似度值(對TM_CCORR_NORMED算法,越接近 1 越好);
-
- min_loc:最小相似度對應的坐標(左上角);
-
- max_loc:最大相似度對應的坐標(左上角)。
- 因為用了TM_CCORR_NORMED算法(值越大越相似),所以取max_loc作為匹配區域的 “左上角坐標”;
- 右下角坐標 = 左上角坐標 + 模板寬高(w和h),這樣就能確定矩形框的范圍。
7. 繪制匹配框并保存結果
image_tem = cv2.rectangle(image, top_left, bottom_right, (0, 0, 255), thickness=2)cv2.imwrite('result.png', image_tem)- cv2.rectangle(img, pt1, pt2, color, thickness):在圖像上繪制矩形框:
-
- img:要繪制的圖像(此處直接修改原始圖像,也可先復制避免破壞原圖);
-
- pt1:矩形左上角坐標(top_left);
-
- pt2:矩形右下角坐標(bottom_right);
-
- color:矩形顏色(BGR 格式,(0,0,255)表示紅色);
-
- thickness:矩形線條粗細(-1表示填充矩形)。
- cv2.imwrite(path, img):將處理后的圖像保存到指定路徑(此處保存為result.png,支持jpg/png等格式)。
8. 顯示結果并釋放資源
cv2.imshow('image_tem', image_tem)cv2.waitKey(0)cv2.destroyAllWindows()- cv2.imshow(window_name, img):創建一個窗口,顯示指定圖像(窗口名image_tem,圖像image_tem);
- cv2.waitKey(0):等待用戶按鍵,0表示 “無限等待”(直到按任意鍵),若傳入數字(如1000)表示等待 1000 毫秒后自動關閉;
- cv2.destroyAllWindows():關閉所有 OpenCV 創建的窗口,釋放內存資源(避免程序退出后窗口殘留)。
四、關鍵優化:讓匹配更精準、更通用
原始代碼僅用了 270° 的模板進行匹配,實際應用中可能存在漏檢或誤檢,以下是幾個重要優化方向:
1. 遍歷所有旋轉角度的模板
若要匹配任意角度的模板,可循環遍歷 4 個旋轉角度(0°、90°、180°、270°),并記錄每個模板的最優匹配結果:
# 定義所有旋轉模板(包含原始模板)templates = [template, # 0°(原始)cv2.rotate(template, cv2.ROTATE_90_CLOCKWISE), # 90°cv2.rotate(template, cv2.ROTATE_180), # 180°cv2.rotate(template, cv2.ROTATE_90_COUNTERCLOCKWISE) # 270°]best_val = 0 # 記錄最大相似度best_rect = None # 記錄最優匹配矩形for temp in templates:h, w = temp.shape[:2]res = cv2.matchTemplate(image, temp, cv2.TM_CCORR_NORMED)_, max_val, _, max_loc = cv2.minMaxLoc(res)# 保留相似度最高的匹配if max_val > best_val:best_val = max_valtop_left = max_locbest_rect = (top_left[0], top_left[1], top_left[0]+w, top_left[1]+h)# 繪制最優匹配框if best_rect:cv2.rectangle(image, (best_rect[0], best_rect[1]), (best_rect[2], best_rect[3]), (0,0,255), 2)2. 設定相似度閾值,過濾誤檢
若原始圖像中沒有與模板相似的區域,代碼仍會標記 “相對最像” 的區域(導致誤檢),可通過設定閾值解決:
threshold = 0.8 # 相似度閾值(根據實際場景調整,0~1之間)if max_val > threshold:# 繪制矩形框(匹配成功)cv2.rectangle(image, top_left, bottom_right, (0,0,255), 2)else:print("未找到匹配區域(相似度:{:.2f} < 閾值:{:.2f})".format(max_val, threshold))3. 處理灰度圖像,提高效率
彩色圖像有 3 個通道,匹配時計算量較大,可將圖像轉為灰度圖減少計算:
# 轉為灰度圖image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)template_gray = cv2.cvtColor(template, cv2.COLOR_BGR2GRAY)# 后續匹配用灰度圖res = cv2.matchTemplate(image_gray, template_gray, cv2.TM_CCORR_NORMED)五、常見問題與解決方案
在實際運行代碼時,可能會遇到以下問題,這里提供對應的解決思路:
| 問題現象 | 可能原因 | 解決方案 |
| 圖像讀取后為None | 路徑錯誤、文件損壞、后綴名錯誤 | 1. 用絕對路徑(如C:/images/image.jpg);2. 檢查文件是否能正常打開;3. 確認后綴名與實際格式一致(如.jpeg≠.jpg) |
| 匹配結果矩陣res為空 | 原始圖像尺寸小于模板圖像 | 更換更大的原始圖像,或縮小模板圖像 |
| 標記的矩形框位置偏移 | 模板旋轉后尺寸獲取錯誤,或算法選擇不當 | 1. 確保旋轉后重新獲取h, w(如h, w = temp.shape[:2]);2. 換用TM_CCOEFF_NORMED算法嘗試 |
| 窗口閃退 | 缺少cv2.waitKey(0)或cv2.destroyAllWindows() | 確保兩行代碼都存在,且waitKey(0)在imshow之后 |
六、總結與拓展
本文通過一段完整代碼,講解了 OpenCV 模板匹配的核心流程,包括圖像讀取、旋轉處理、匹配算法、結果可視化等關鍵步驟,并提供了優化方向和問題解決方案。
拓展學習方向:
- 多尺度模板匹配:若模板在原始圖像中大小不確定(如遠處的物體更小),可縮放模板生成多尺度版本,再進行匹配;
- 非剛性模板匹配:對于形變的模板(如彎曲的文字),可學習cv2.findTransformECC等進階函數;
- 結合深度學習:對于復雜場景(如遮擋、模糊),可使用 YOLO、SSD 等目標檢測模型,精度遠超傳統模板匹配。
)








)









