C++進階:紅黑樹介紹及模擬實現
上次介紹了AVL樹:C++進階:AVL樹詳解及模擬實現(圖示講解旋轉過程)
今天就來緊接著來紅黑樹啦!!!
文章目錄
- 1.紅黑樹介紹
- 約束規則
- 2.項目文件規劃
- 3.整體框架(節點和Tree)
- 4.RBL樹的新節點插入
- 4.1 叔叔節點存在且為紅
- 4.2 叔叔節點不存在
- 4.3叔叔節點存在而且為黑(單旋情況,左子樹的左,和右子樹的右)
- 4.4叔叔節點存在而且為黑(雙旋情況,左子樹的右,和右子樹的左)
- 4.5完整版Insert()
- 5.中序方便過會測試
- 6.編寫函數看是否滿足要求
- 7.測試
- 8.全部代碼
- 8.1 RBTree.h
- 8.2 test.cpp
1.紅黑樹介紹
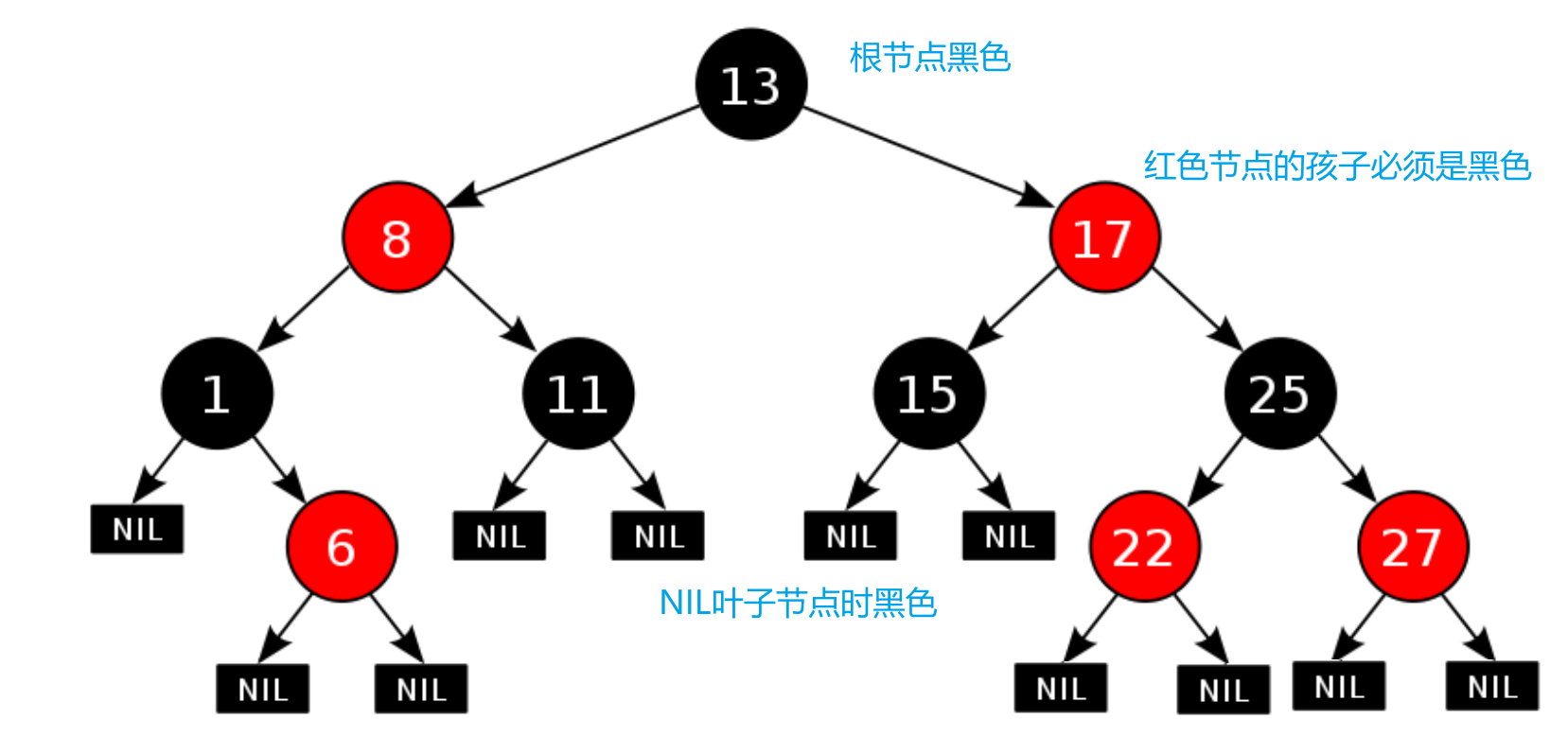
紅黑樹是一種自平衡的二叉搜索樹,它在每個節點上增加了一個表示顏色的存儲位,可以是紅色(Red)或黑色(Black)。 通過對任何一條從根到葉子的路徑上各個結點著色方式的限制,紅黑樹確保沒有一條路徑會比其他路徑長出倆倍,因而是接近平衡的從而保證了查找、插入和刪除操作的時間復雜度為 O ( l o g N ) O(logN) O(logN)
約束規則
-
每個結點是紅色或者黑色
-
根節點是黑色
-
如果一個節點是紅色的,則它的兩個孩子結點是黑色的(不能有連續的紅節點)
-
對于每個結點,從該結點到其所有后代葉結點的簡單路徑上,均包含相同數目的黑色結點
-
葉子節點(NIL節點)是黑色的(此處的葉子結點指的是空結點)
2.項目文件規劃

頭文件RBTree.h:進行模擬的編寫
源文件test.cpp:進行測試,檢查代碼邏輯是否滿足期望
3.整體框架(節點和Tree)
enum Colour//使用枚舉來定義,后面模擬哈希時也會用到類似的
{RED,BLACK
};template<class K,class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;//左節點RBTreeNode<K, V>* _right;//右節點RBTreeNode<K, V>* _parent;//父親節點Colour _col;//顏色,紅和黑嘛pair<K,V> _kv;//節點里存pairRBTreeNode(const pair<K, V>& kv)//都直接在初始化列表里初始化了:_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED)//這里新插入的節點一定要是紅色,黑色的話會直接破壞規則{}
};template<class K, class V>
class RBTree
{typedef RBTreeNode<K, V> Node;//名字太長了,叫Node也更好理解
public:private:Node* _root = nullptr;//給上缺省值
};4.RBL樹的新節點插入
基本步驟:
查找插入位置: 首先,我們需要找到新節點應該插入的位置。從根節點開始,按照二叉搜索樹的性質,逐級向左或向右比較鍵值,直到找到一個合適的位置。
插入新節點: 找到插入位置后,我們創建一個新的節點,顏色為紅,并將其插入到樹中。如果樹為空,則新節點成為樹的根節點。否則,將新節點插入到合適的位置,使得樹仍然保持二叉搜索樹的性質。
插入后有需要變化時情況很多,下面具體分析
因為新節點的默認顏色是紅色,因此:如果其雙親節點的顏色是黑色,沒有違反紅黑樹任何性質,則不需要調整;但當新插入節點的雙親節點顏色為紅色時,就違反了性質三不能有連在一起的紅色節點,此時需要對紅黑樹分情況來討論:
如果新插入節點的父親節點是黑,那根本不會違反規則,如果要調整只有如下情況:

bool Insert(const pair<K,V> kv){if (_root == nullptr)//如果為空,直接更換新節點{_root = new Node(kv);_root->_col = BLACK;//注意默認是紅,這里改成黑return true;}Node* parent = nullptr;//存一下,新根才能鏈接Node* cur = _root;while (cur)//開始找插入位置{if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;//不能有相等的}}cur = new Node(kv); //這是默認紅色的if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//新節點鏈接成功了while (parent != nullptr && parent->_col == RED)//父親節點存在且是紅進來,黑的直接滿足不用調整{//這里進行處理}_root->_col = BLACK;//最后直接改根節點,不用再具體考慮return true;}
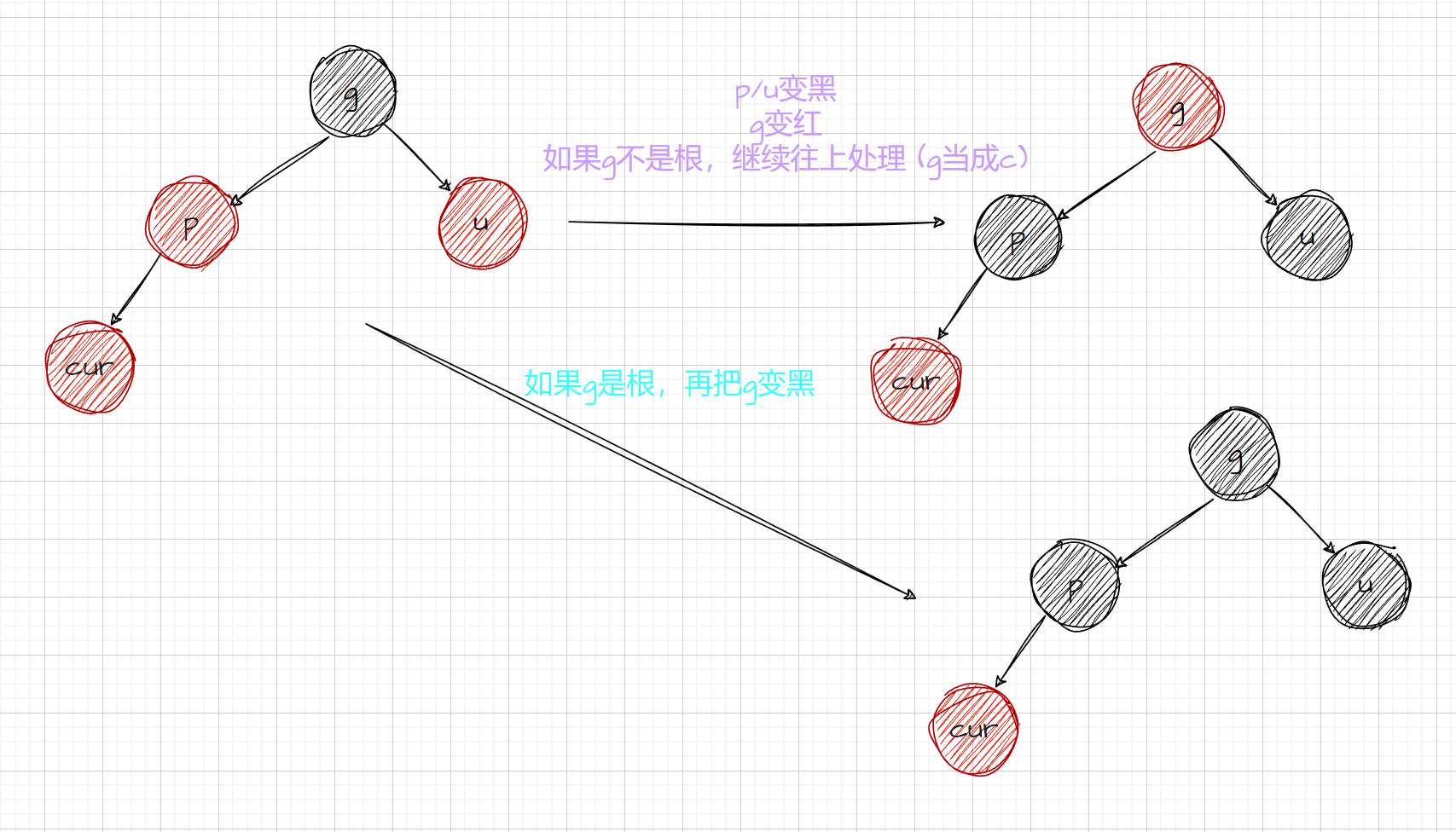
4.1 叔叔節點存在且為紅
以下步驟來調整:
- 將父節點和叔叔節點都改為黑色。
- 將祖父節點改為紅色。
- 將當前節點指向祖父節點,并將祖父節點設為當前節點的父節點(開始向上走)。
4.2 叔叔節點不存在
如果u節點不存在,則cur一定是新插入節點,因為如果cur不是新插入節點則cur和p一定有一個節點的顏色是黑色,就不滿足性質4: 每條路徑黑色節點個數相同。

- p為g的左孩子,cur為p的左孩子,則進行右單旋轉
p為g的右孩子,cur為p的右孩子,則進行左單旋轉
- p、g變色—>p變黑,g變紅
void RotateL(Node* parent)//左旋{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* ppnode = parent->_parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}}void RotateR(Node* parent)//右旋{++rotateSize;Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* ppnode = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}}
4.3叔叔節點存在而且為黑(單旋情況,左子樹的左,和右子樹的右)
如果u節點存在,則其一定是黑色的,那么cur節點原來的顏色一定是黑色的現在看到其是紅色的原因是因為cur的子樹在調整的過程中將cur節點的顏色由黑色改成紅色
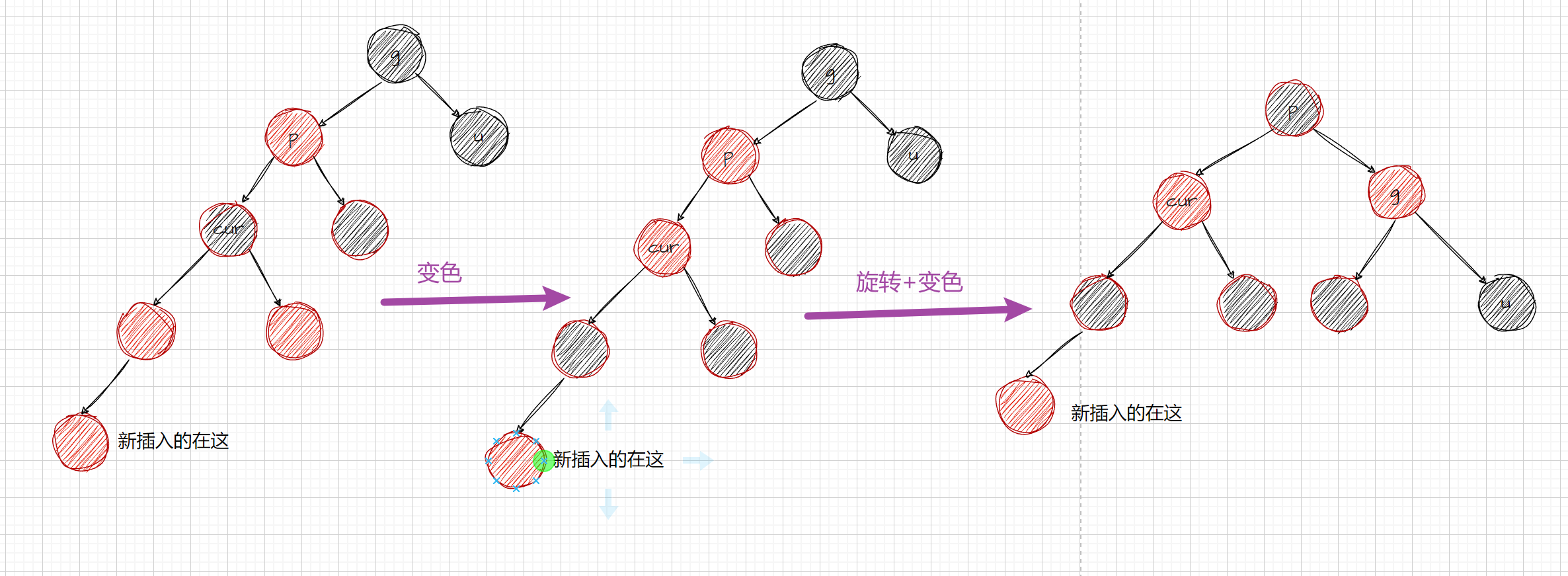
4.4叔叔節點存在而且為黑(雙旋情況,左子樹的右,和右子樹的左)
p為g的左孩子,cur為p的右孩子,左右雙旋+變色
p為g的右孩子,cur為p的左孩子,右左雙旋 +變色
4.5完整版Insert()
bool Insert(const pair<K,V> kv){if (_root == nullptr)//如果為空,直接更換新節點{_root = new Node(kv);_root->_col = BLACK;//注意默認是紅,這里改成黑return true;}Node* parent = nullptr;//存一下,新根才能鏈接Node* cur = _root;while (cur)//開始找插入位置{if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;//不能有相等的}}cur = new Node(kv); //這是默認紅色的if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//新節點鏈接成功了while (parent != nullptr && parent->_col == RED)//父親節點存在且是紅進來,黑的直接滿足不用調整{Node* grandfather = parent->_parent;//接下來分兩種:parent是grandfather左或者右if (parent == grandfather->_left)//左{Node* uncle = grandfather->_right;//情況一:叔叔存在且為紅if (uncle && uncle->_col == RED){//先變色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//繼續往上走cur = grandfather;parent = cur->_parent;}else//情況二:叔叔不存在或者存在且為黑{if (cur == parent->_left)//cur在parent左,單旋{// g// p u// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else//cur在parent右,雙旋{// g// p u// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}}//情況二一旦旋轉完了,不用向上了break;}else//parent是grandfather右{Node* uncle = grandfather->_left;// 情況一:叔叔存在且為紅if (uncle && uncle->_col == RED){// 變色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 繼續往上處理cur = grandfather;parent = cur->_parent;}else// 情況二:叔叔不存在或者存在且為黑{// 旋轉+變色// g// u p// cif (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// u p// cRotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}}break;}}_root->_col = BLACK;//最后直接改根節點,不用再具體考慮return true;}
5.中序方便過會測試
void InOrder(){_InOrder(_root);}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first<< endl;_InOrder(root->_right);}
6.編寫函數看是否滿足要求
就從規定出發:
- 根節點不是黑的不滿足
- 不是每條路徑的黑色節點數量都相同
- 存在連續的紅節點了
這些都是不滿足要求
bool IsBalance(){if (_root->_col == RED){return false;}//這里我們先算一條路徑的黑色節點數量,作為參考int ref = 0;Node* cur = _root;while (cur){if(cur->_col==BLACK)ref++;cur = cur->_left;//就求最左路徑}return Check(_root, 0, ref);}bool Check(Node* cur, int blackNum, int ref){if (cur == nullptr)//==nullptr 說明一條路徑走完了{if (blackNum != ref){cout << "黑色節點的數量不相等" << endl;return false;}return true;}//這里開始檢查沒有連續的紅,就看每個cur節點和他的父親就行if (cur->_col == RED && cur->_parent->_col == RED){cout << cur->_kv.first << "存在連續的紅色節點" << endl;return false;}if (cur->_col == BLACK){blackNum++;}return Check(cur->_left, blackNum, refBlackNum)&& Check(cur->_right, blackNum, refBlackNum);//遞歸進去找}
IsBalance()函數首先檢查根節點的顏色是否為紅色,如果是,則不滿足紅黑樹的性質。然后,通過調用Check()函數來遞歸檢查每個節點,確保在每條路徑上沒有連續的紅色節點,并統計路徑上的黑色節點數量,最后與參考值進行比較。
Check()函數中,遞歸遍歷每個節點,并檢查其顏色。如果當前節點為紅色,并且其父節點也為紅色,則說明存在連續的紅色節點,不滿足紅黑樹的性質。如果當前節點為黑色,則增加黑色節點計數器。遞歸地對當前節點的左右子節點進行檢查,直到遍歷完整棵樹的所有路徑。通過這樣的檢查,我們可以驗證紅黑樹是否滿足性質,從而確認樹的平衡性。
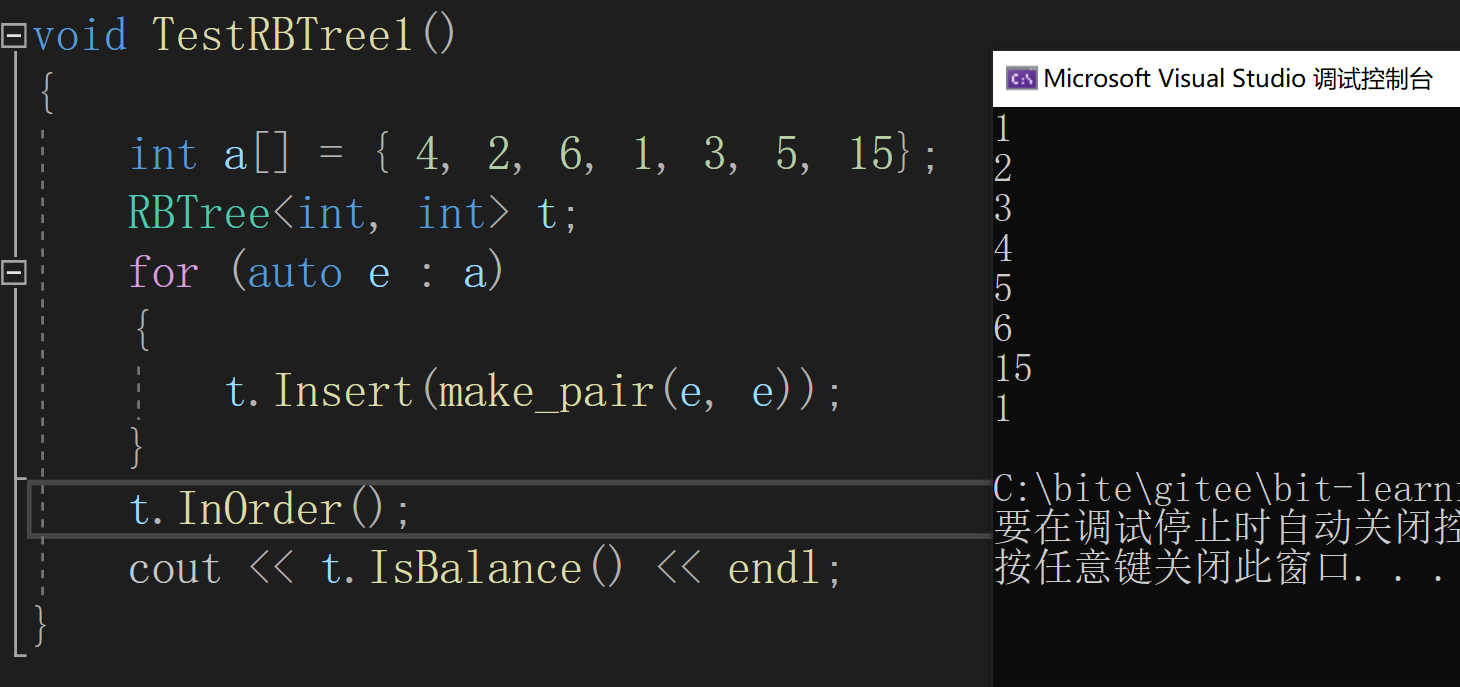
7.測試
void TestRBTree1()
{int a[] = { 4, 2, 6, 1, 3, 5, 15};RBTree<int, int> t;for (auto e : a){t.Insert(make_pair(e, e));}t.InOrder();cout << t.IsBalance() << endl;
}
8.全部代碼
8.1 RBTree.h
#pragma onceenum Colour//使用枚舉來定義,后面模擬哈希時也會用到類似的
{RED,BLACK
};template<class K,class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;//左節點RBTreeNode<K, V>* _right;//右節點RBTreeNode<K, V>* _parent;//父親節點Colour _col;//顏色,紅和黑嘛pair<K,V> _kv;//節點里存pairRBTreeNode(const pair<K, V>& kv)//都直接在初始化列表里初始化了:_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED)//這里新插入的節點一定要是紅色,黑色的話會直接破壞規則{}
};template<class K, class V>
class RBTree
{typedef RBTreeNode<K, V> Node;//名字太長了,叫Node也更好理解
public:bool Insert(const pair<K,V> kv){if (_root == nullptr)//如果為空,直接更換新節點{_root = new Node(kv);_root->_col = BLACK;//注意默認是紅,這里改成黑return true;}Node* parent = nullptr;//存一下,新根才能鏈接Node* cur = _root;while (cur)//開始找插入位置{if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;//不能有相等的}}cur = new Node(kv); //這是默認紅色的if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//新節點鏈接成功了while (parent != nullptr && parent->_col == RED)//父親節點存在且是紅進來,黑的直接滿足不用調整{Node* grandfather = parent->_parent;//接下來分兩種:parent是grandfather左或者右if (parent == grandfather->_left)//左{Node* uncle = grandfather->_right;//情況一:叔叔存在且為紅if (uncle && uncle->_col == RED){//先變色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//繼續往上走cur = grandfather;parent = cur->_parent;}else//情況二:叔叔不存在或者存在且為黑{if (cur == parent->_left)//cur在parent左,單旋{// g// p u// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else//cur在parent右,雙旋{// g// p u// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}}//情況二一旦旋轉完了,不用向上了break;}else//parent是grandfather右{Node* uncle = grandfather->_left;// 情況一:叔叔存在且為紅if (uncle && uncle->_col == RED){// 變色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 繼續往上處理cur = grandfather;parent = cur->_parent;}else// 情況二:叔叔不存在或者存在且為黑{// 旋轉+變色// g// u p// cif (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// u p// cRotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}}break;}}_root->_col = BLACK;//最后直接改根節點,不用再具體考慮return true;}void RotateL(Node* parent)//左旋{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* ppnode = parent->_parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}}void RotateR(Node* parent)//右旋{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* ppnode = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}}void InOrder(){_InOrder(_root);}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first<< endl;_InOrder(root->_right);}bool IsBalance(){if (_root->_col == RED){return false;}//這里我們先算一條路徑的黑色節點數量,作為參考int ref = 0;Node* cur = _root;while (cur){if(cur->_col==BLACK)ref++;cur = cur->_left;//就求最左路徑}return Check(_root, 0, ref);}bool Check(Node* cur, int blackNum, int ref){if (cur == nullptr)//==nullptr 說明一條路徑走完了{if (blackNum != ref){cout << "黑色節點的數量不相等" << endl;return false;}return true;}//這里開始檢查沒有連續的紅,就看每個cur節點和他的父親就行if (cur->_col == RED && cur->_parent->_col == RED){cout << cur->_kv.first << "存在連續的紅色節點" << endl;return false;}if (cur->_col == BLACK){blackNum++;}return Check(cur->_left, blackNum, ref)&& Check(cur->_right, blackNum, ref);//遞歸進去找}private:Node* _root = nullptr;//給上缺省值
};void TestRBTree1()
{int a[] = { 4, 2, 6, 1, 3, 5, 15};RBTree<int, int> t;for (auto e : a){t.Insert(make_pair(e, e));}t.InOrder();cout << t.IsBalance() << endl;
}8.2 test.cpp
#define _CRT_SECURE_NO_WARNINGS 1
#include<iostream>
using namespace std;#include"RBTree.h"int main()
{TestRBTree1();return 0;
}
今天就到這里啦!!
![whisper報錯:hp, ht, pid, tid = _winapi.CreateProcess [WinError 2] 系統找不到指定的文件。](http://pic.xiahunao.cn/whisper報錯:hp, ht, pid, tid = _winapi.CreateProcess [WinError 2] 系統找不到指定的文件。)













![[筆記] srlua庫編譯](http://pic.xiahunao.cn/[筆記] srlua庫編譯)


)
:Excel數據可視化)
)