Intel RealSense D455深度相機安裝過程遇到過一些報錯,所以記錄一下安裝過程!!!以后方便回顧。
1.安裝最新的IntelRealSense SDK2.0
(1) 注冊服務器的公鑰
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE(2) 將服務器添加到存儲庫列表中
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u(3) 安裝SDK2
安裝依賴:
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils如果安裝realsense-ros,還需以下依賴:
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg2.測試相機的連接
(1)查看設備號
將深度相機連接到電腦,終端輸入:
ls /dev/video*(2)啟動realsense-viewer
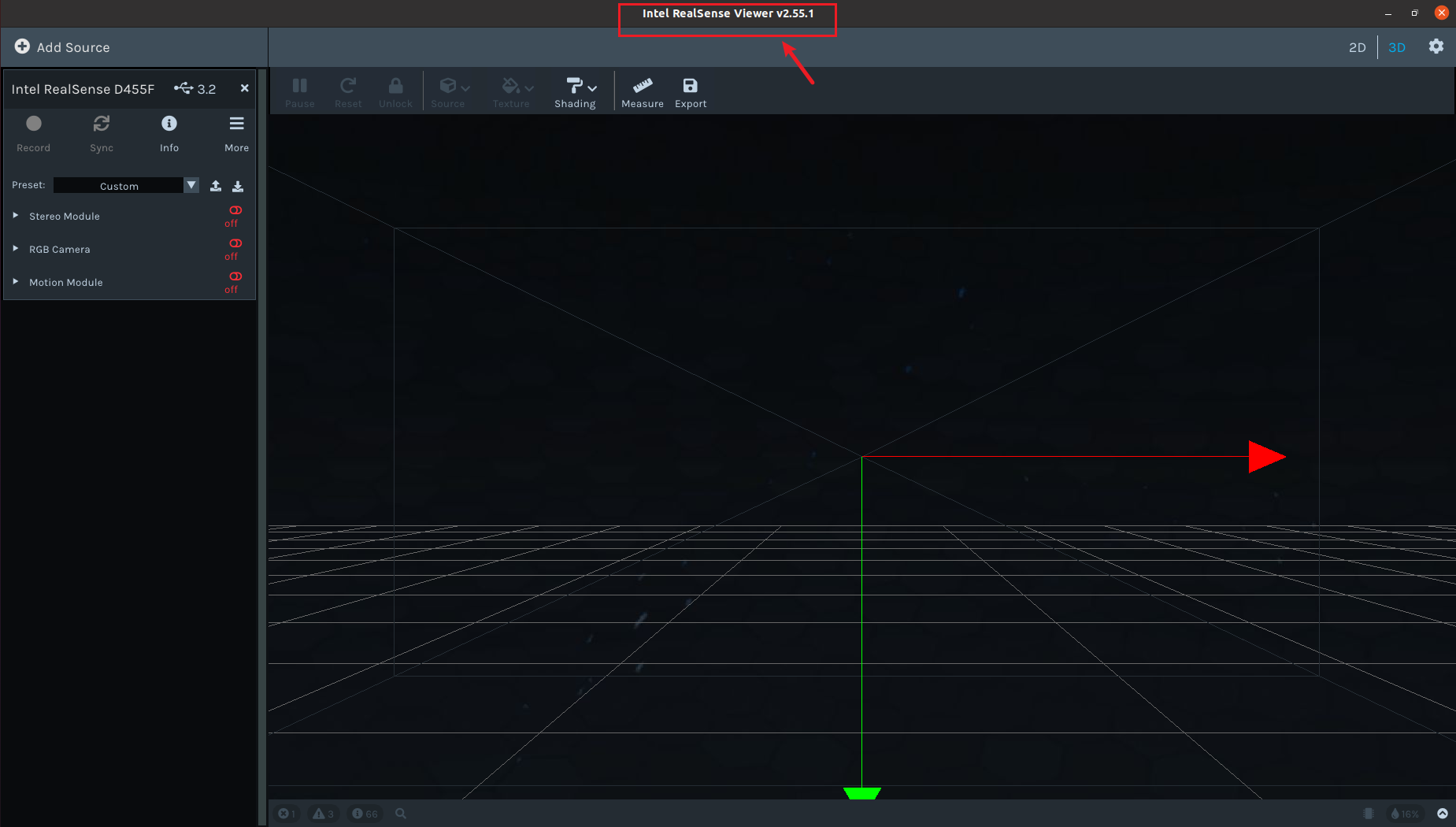
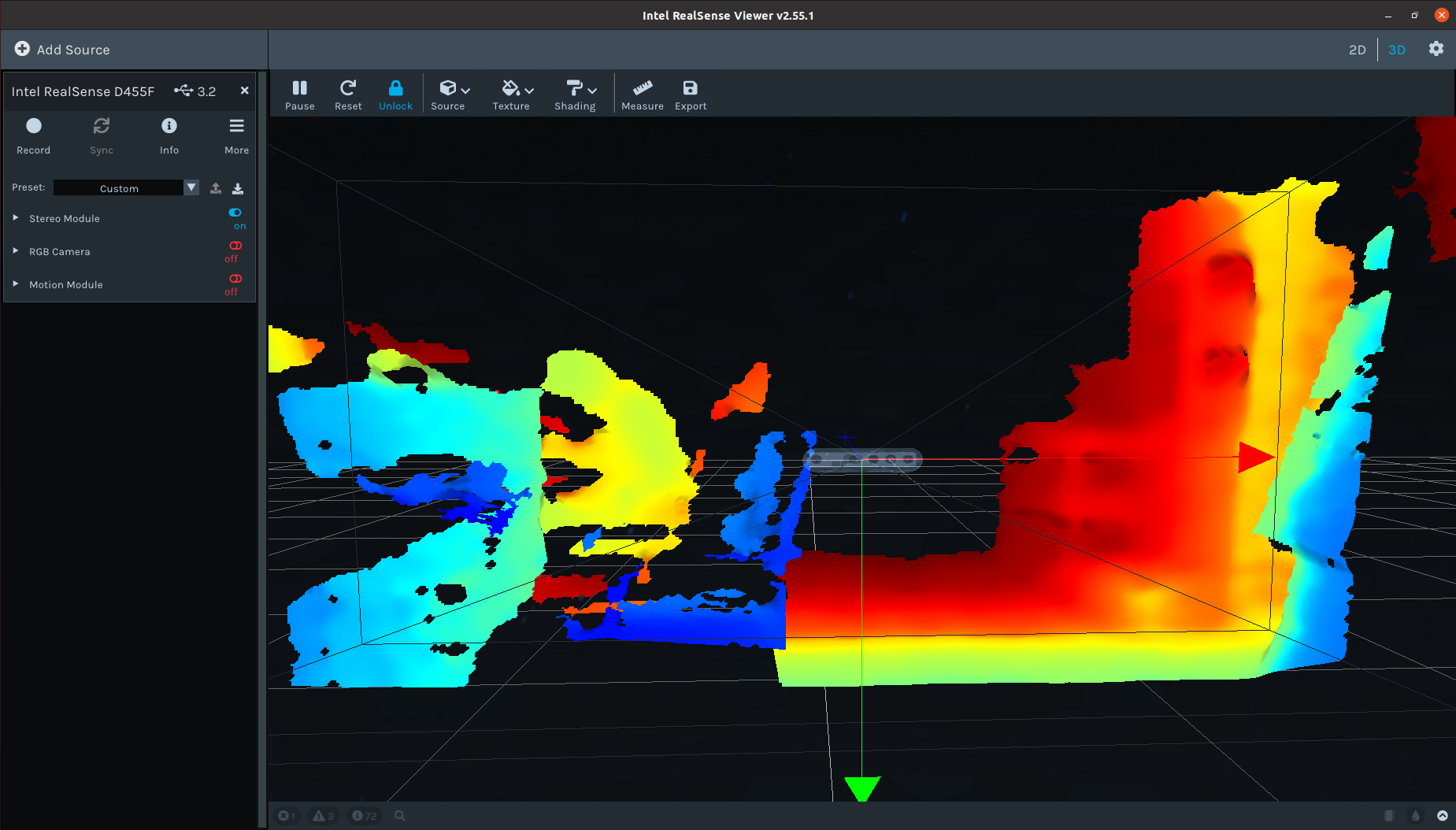
D455相機需要USB3.0及以上接口,才能正常的傳輸數據,終端輸入,讀取相機的數據:
realsense-viewer連接成功的效果如下:
3.安裝realsense-ros驅動
(1)創建工作空間
mkdir -p d455_ws/src
cd d455_ws/src(2)下載realsense-ros
git clone https://github.com/IntelRealSense/realsense-ros.git(3)將當前分支切換到最新版本
cd realsense-ros/git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`cd ..(4)安裝依賴
sudo apt-get install ros-noetic-ddynamic-reconfigure(5)編譯運行
cd /d455_ws
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release但這一步編譯一直報錯:
CMake Warning at realsense-ros/realsense2_camera/CMakeLists.txt:44 (find_package):Found package configuration file:/usr/lib/x86_64-linux-gnu/cmake/realsense2/realsense2Config.cmakebut it set realsense2_FOUND to FALSE so package "realsense2" is consideredto be NOT FOUND. Reason given by package:The following imported targets are referenced, but are missing: fastcdrfastrtps
CMake Error at realsense-ros/realsense2_camera/CMakeLists.txt:48 (message):Intel RealSense SDK 2.0 is missing, please install it from https://github.com/IntelRealSense/librealsense/releases-- Configuring incomplete, errors occurred!
See also "/home/mjc/d455_ws/build/CMakeFiles/CMakeOutput.log".
Invoking "cmake" failed
網上查了很多原因,截至2025.9.12,只有這個辦法適合我,那就是降級安裝:
https://github.com/IntelRealSense/librealsense/issues/14158
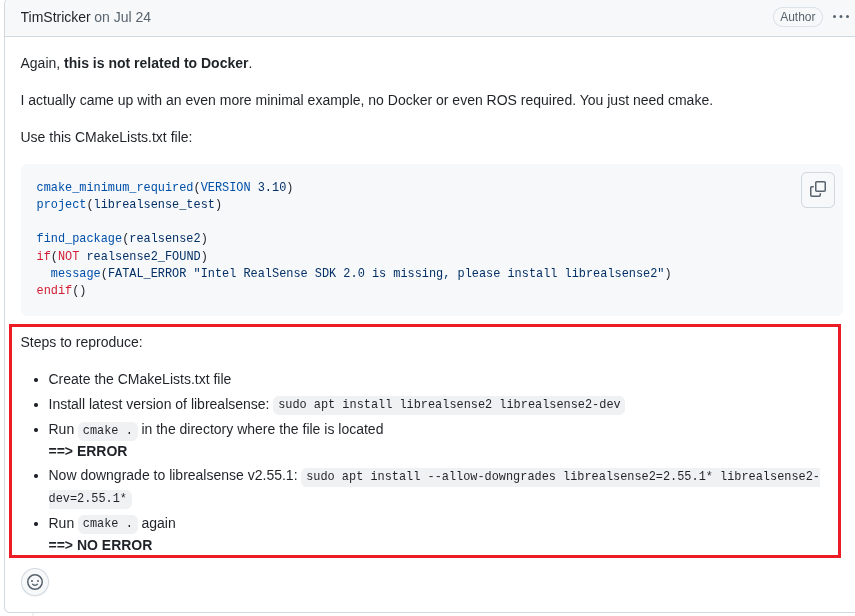
報錯解決:
1. 降級到 RealSense v2.55.1
# 1.降級安裝
sudo apt install --allow-downgrades librealsense2=2.55.1* librealsense2-dev=2.55.1*# 2.同時安裝其他相關包的對應版本
sudo apt install --allow-downgrades librealsense2-dkms=1.3.* librealsense2-utils=2.55.1*# 3.安裝缺失的依賴包
sudo apt install --allow-downgrades librealsense2-gl=2.55.1*# 4.再安裝 utils
sudo apt install --allow-downgrades librealsense2-utils=2.55.1*2. 驗證降級是否成功
# 3.驗證降級是否成功
pkg-config --modversion realsense2 # 應該顯示 2.55.1
# 或者重新打開 realsense-viewer 查看版本
realsense-viewer3.?清理并重新編譯
cd ~/d455_ws
rm -rf build/ devel/
source /opt/ros/noetic/setup.bash
catkin_make4.如果想要鎖定版本(防止自動升級)
sudo apt-mark hold librealsense2 librealsense2-dev librealsense2-utils librealsense2-dkms!!!更新:9.15號,似乎已經解決了這個錯誤,但我還沒有嘗試:
https://github.com/IntelRealSense/realsense-ros/issues/3406
(6)成功編譯后,安裝到本機
catkin_make install4.啟動深度相機
4.1?啟動RGB-D相機
(1)先安裝ros軟件包rgbd_launch
sudo apt install ros-noetic-rgbd-launch(2)啟動相機
cd d455_ws
source ./devel/setup.bash
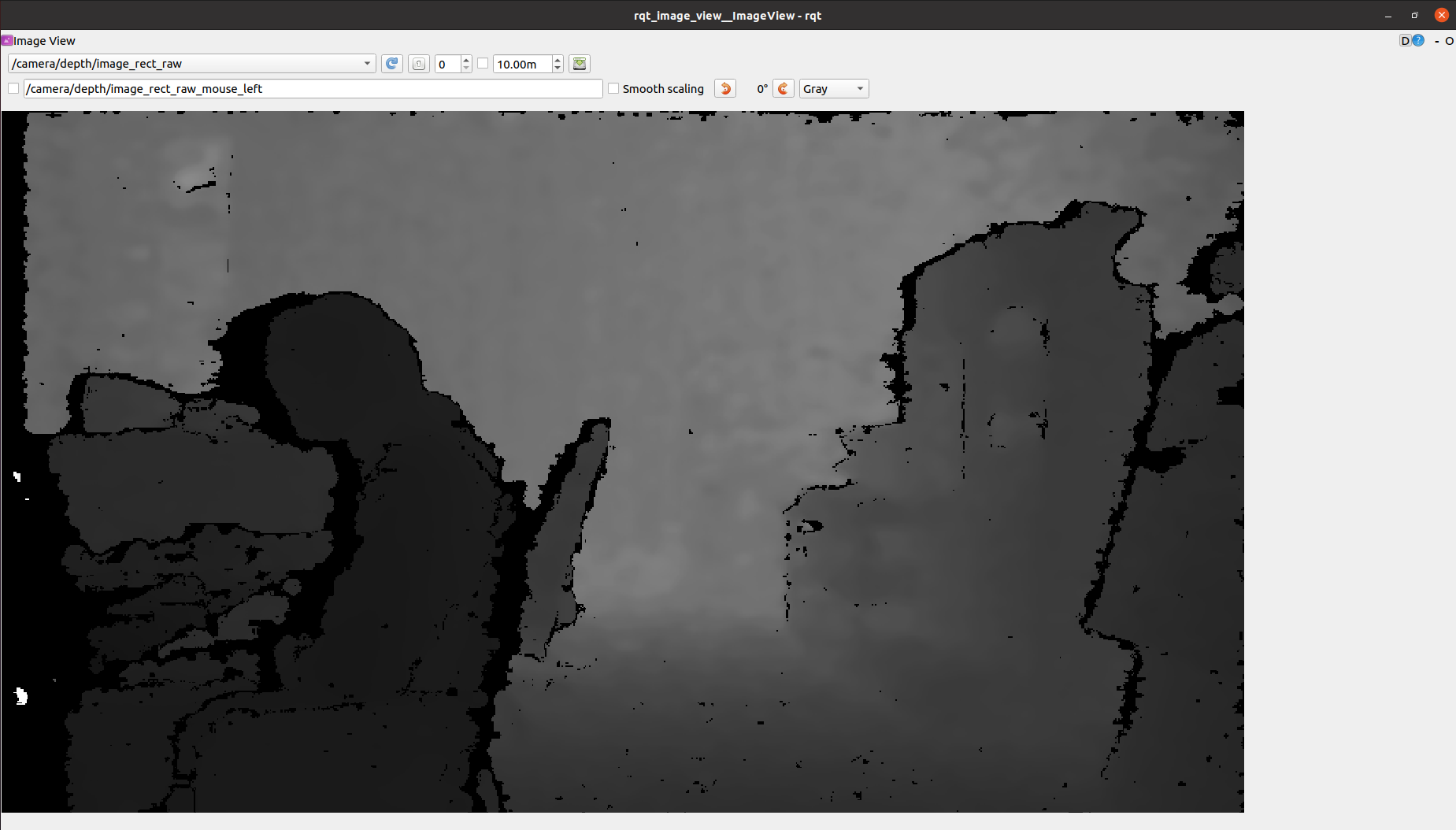
roslaunch realsense2_camera rs_rgbd.launch4.2 可視化相機數據
rosrun rqt_image_view rqt_image_view選擇topic,連接成功畫面如圖所示:
參考資料:
https://jishuzhan.net/article/1790726978593099778
https://blog.csdn.net/weixin_50508111/article/details/124566566
http://www.chinasem.cn/article/826052
https://blog.csdn.net/weixin_50508111/article/details/125422880





:計數排序)

;初識類的默認成員函數)

)


![【AI開發】【前后端全棧】[特殊字符] AI 時代的快速開發思維](http://pic.xiahunao.cn/【AI開發】【前后端全棧】[特殊字符] AI 時代的快速開發思維)
—PyTorch使用—張量的創建和類型轉換】)





