目錄
引言:當“大腦”學會思考,機器人才能走出實驗室
一、具身智能的“不可能三角”:機器人“大腦”的核心困境
二、WALL-OSS的四把重錘:如何系統性地破解難題?
2.1 第一錘:更聰明的“大腦”架構 —— “共享注意力 + 專家分流”
2.2 第二錘:運動員式的訓練法則 —— “先啟發,后融合”
2.3 第三錘:貫穿物理世界的思維鏈 —— “統一跨層級CoT”
2.4 第四錘:源于真實世界的“養料” —— 高質量真機數據
三、“真開源”的魄力:為行業鋪設一條高速公路
結論:一個值得期待的“安卓時刻”

🎬 攻城獅7號:個人主頁
🔥 個人專欄:《AI前沿技術要聞》
?? 君子慎獨!
?🌈 大家好,歡迎來訪我的博客!
?? 此篇文章主要介紹?WALL-OSS開源
📚 本期文章收錄在《AI前沿技術要聞》,大家有興趣可以自行查看!
?? 歡迎各位 ?? 點贊 👍 收藏 ?留言 📝!
引言:當“大腦”學會思考,機器人才能走出實驗室
????????2025年的具身智能賽道,一半是火焰,一半是海水。
????????火焰是資本的狂熱和一次次驚艷的技術演示。我們看到機器人在視頻里疊衣服、泡咖啡,似乎通用機器人的曙光就在眼前。海水則是產業落地的冰冷現實——大多數模型陷入了“過擬合演示”的怪圈,一旦走出實驗室的特定環境,便寸步難行。
????????根本原因在于,打造一個真正通用的具身智能“大腦”,極其困難。它必須同時解決一個業界公認的“不可能三角”難題:模態的統一、動作的精度和能力的泛化。
????????就在此時,剛剛完成近10億A+輪融資的“自變量機器人”,做出了一個讓行業頗為震動的決定:將其核心具身智能基礎大模型——WALL-OSS,進行徹底的開源。
????????這不只是一次尋常的技術發布,更像是一場宣言。它試圖正面回答那個核心問題:如何讓機器人不僅“會動”,更能“會思考”?WALL-OSS給出的答案,或許能為整個行業提供一塊堅實的“起跑板”。
一、具身智能的“不可能三角”:機器人“大腦”的核心困境
????????要理解WALL-OSS的價值,我們必須先理解它試圖攻克的難題——這個“不可能三角”,幾乎是所有具身智能團隊的噩夢。
(1)模態統一 (Unified Modality):人類通過眼睛看、耳朵聽、大腦思考、四肢行動,這是一個無縫融合的整體。但對機器人而言,如何將視覺(Vision)、語言(Language)、動作(Action)這三大模態真正統一在一個模型里,而不是簡單地“拼接”在一起,是一個巨大的挑戰。錯誤的融合方式,很可能導致模型在學習動作時,忘掉了原本強大的視覺和語言理解能力,即“災難性遺忘”。
(2)動作精度 (Action Precision):再聰明的“大腦”,如果指揮著一雙笨拙的手,也毫無用處。機器人需要能生成高頻、連續、細粒度的物理動作,才能完成現實世界中的精細操作,比如擰瓶蓋、插鑰匙。這要求模型具備極強的物理世界理解和控制能力。
(3)能力泛化 (Generalization):這是區分“機器人”和“自動化機器”的關鍵。一個真正的智能體,應該將在廚房學會的“拿起杯子”的能力,泛化到臥室去“拿起遙控器”,而不是每個新場景、新物體都需要重新訓練。它要求模型具備強大的推理和舉一反三的能力。
????????過去,大多數模型只能在這三個頂點中取其一二,三者兼顧者寥寥無幾。而WALL-OSS的出現,正是通過一系列系統性的創新,試圖正面擊碎這個三角困境。
二、WALL-OSS的四把重錘:如何系統性地破解難題?
????????WALL-OSS并非依賴某一項單點技術突破,而是像一位經驗豐富的工程師,從架構、數據、訓練范式等多個維度,進行了一整套組合創新。
2.1 第一錘:更聰明的“大腦”架構 —— “共享注意力 + 專家分流”
????????為了解決模態統一的難題,WALL-OSS首創了一種新穎的架構。我們可以用一個形象的比喻來理解它:
????????想象一個項目團隊,有“視覺專家”、“語言專家”和“動作專家”。傳統的做法可能是讓他們各干各的,然后把報告匯總起來,效率低下且容易出錯。而WALL-OSS的設計是:
(1)共享注意力(Shared Attention):建立一個中央會議室,讓所有專家在這里共享信息、交叉討論,確保每個人都對項目的整體情況有充分理解。這保證了視覺、語言、動作信息的高度融合。
(2)專家分流(Expert FFN):討論結束后,每個專家回到自己的獨立辦公室,利用自己的專業知識高效處理特定任務。這保證了各個模態在融合的同時,不會互相干擾,保留了各自的專業性。
????????這種設計,既實現了深度融合,又有效避免了“災難性遺忘”,讓模型在學習復雜動作時,依然保持著頂級的視覺語言理解能力。
2.2 第二錘:運動員式的訓練法則 —— “先啟發,后融合”
????????擁有了好的架構,如何進行高效訓練?WALL-OSS采用了一種類似培養頂尖運動員的兩階段訓練策略。
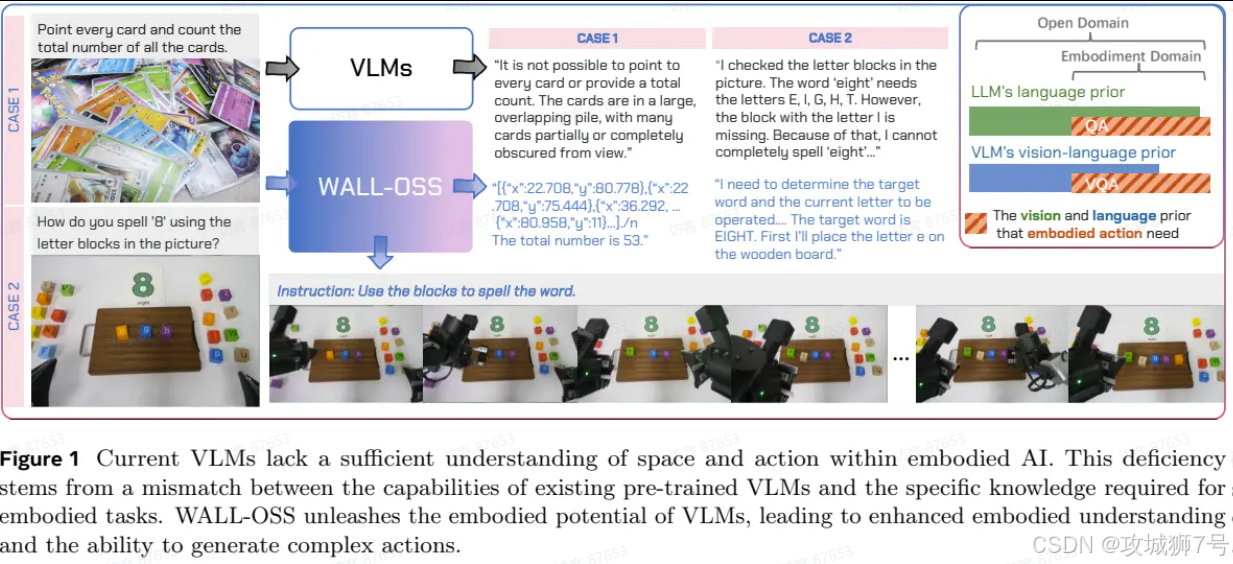
(1)第一階段:啟發(Inspiration Stage):這個階段不急于讓機器人“動手”,而是先讓它“動腦”。通過海量的“具身視覺問答”(Embodied VQA)等任務,讓模型看著機器人在各種場景下的圖片和視頻,然后回答“機械臂在哪里?”“它下一步該做什么?”這類問題。這極大地增強了模型對物理空間、物體關系和任務流程的深層理解,為其打下堅實的感知和認知基礎。
(2)第二階段:融合(Integration Stage):在模型足夠“聰明”之后,再開始教它具體的物理動作。這個過程也分兩步:先凍結“認知腦區”,只訓練“運動腦區”,讓它專心學習動作控制;然后再將整個模型解凍,進行聯合優化,實現“手腦協同”。
????????這種“先離散、后連續、再聯合”的訓練范式,確保了VLM強大的認知能力能夠穩定、無損地遷移和擴展到物理動作上。
2.3 第三錘:貫穿物理世界的思維鏈 —— “統一跨層級CoT”
????????我們熟悉的大語言模型,可以通過“讓我們一步步思考”(Let's think step by step)來進行邏輯推理。WALL-OSS則獨創性地將這種“思維鏈(CoT)”能力,從純文本世界擴展到了物理世界。
????????當WALL-OSS接收到一個復雜指令,如“把桌子上的水果放到籃子里”,它的思考過程是連貫且跨越多個層級的:
(1)高層推理(語言):“桌上有蘋果和香蕉,籃子是空的,我需要先把它們都拿起來。”
(2)子任務規劃(語言+視覺):“第一步,定位并拿起蘋果。第二步,把蘋果放進籃子。第三步...”
(3)底層執行(動作):生成一連串精確的、連續的機械臂控制指令,完成“拿起蘋果”這個動作。
????????這個過程在一個統一的、端到端的模型內無縫完成,避免了傳統多模塊系統之間因信息傳遞造成的誤差累積。這正是WALL-OSS能夠勝任長程、復雜任務,并展現出強大推理和泛化能力的關鍵。
2.4 第四錘:源于真實世界的“養料” —— 高質量真機數據
????????“閉門造車”無法造出能在真實世界行動的機器人。自變量團隊從一開始就堅持以真實世界數據為主要訓練來源,并為此自建了大規模數據采集工廠。
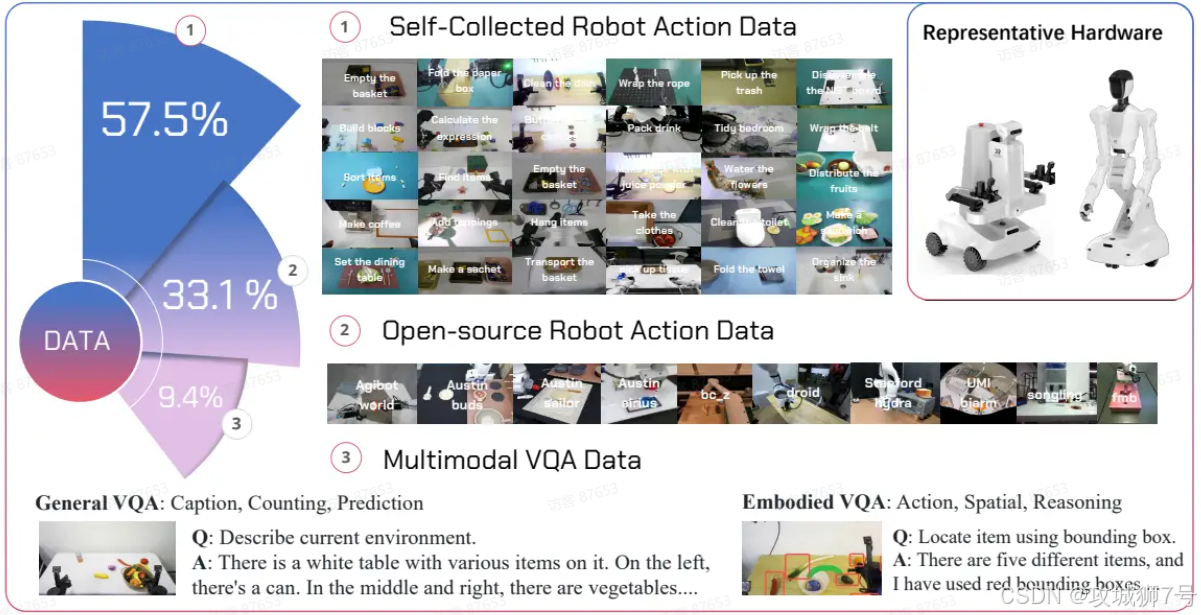
????????相比于仿真數據,高質量的真機數據包含了物理世界中無窮的細節、噪聲和不確定性。用這樣的數據“喂養”出的模型,其魯棒性和對現實世界的適應能力,遠非純仿真模型可比。
三、“真開源”的魄力:為行業鋪設一條高速公路
????????如果說技術創新是WALL-OSS的“肌肉”,那么徹底的開源就是它的“胸懷”。
????????在具身智能領域,開源并不罕見,但很多所謂的“開源”更像是“開放日”,開發者下載后發現,要么跑不起來,要么缺少關鍵代碼,要么需要特定的昂貴硬件。
????????WALL-OSS的開源則顯得誠意十足:
(1)完整方案:開放了包括預訓練模型權重、完整的訓練和推理代碼、數據集接口,甚至附帶了詳細的部署文檔。
(2)低門檻:開發者僅需RTX 4090級別的消費級顯卡,就能完成從訓練到部署的全過程,這極大地降低了中小團隊和科研人員的進入門檻。
(3)高兼容性:模型可以快速微調,適配到不同公司的機器人本體上,真正做到“一個大腦,多種身體”。
????????自變量團隊的目標很明確:他們不希望每個入局者都把大量時間和資源浪費在“造輪子”上。通過提供一個強大、通用、開箱即用的能力基座,WALL-OSS希望讓整個行業都能站上一個更高的起點,專注于場景創新和應用落地。
結論:一個值得期待的“安卓時刻”
????????WALL-OSS的出現,連同其背后的系統性思考和徹底的開源戰略,為混沌的具身智能賽道注入了一股清流。它證明了,“不可能三角”并非牢不可破,通過嚴謹的工程學方法可以實現系統性的突破。
????????在行業普遍流傳著“硬件看宇樹,大腦看自變量”的說法時,自變量機器人通過開源WALL-OSS,展現了其作為“大腦”廠商的格局和遠見。它所做的,不僅僅是發布一個模型,更是在為整個行業鋪設基礎設施。
????????這或許就是具身智能領域的“安卓時刻”——一個強大、開放、通用的底層操作系統已經出現,無數創新的上層應用,正等待著被開發者們創造出來。而這場通往通用機器人的長跑,也因此變得更加值得期待。
更多詳情:
Huggingface:?
https://huggingface.co/x-square-robot
GitHub:?
https://github.com/X-Square-Robot/wall-x
項目鏈接:?
https://x2robot.com/en/research/68bc2cde8497d7f238dde690
論文鏈接:?
https://x2-robot.feishu.cn/file/FurYbuThcofkOqxrsy7cnzUbndd
看到這里了還不給博主點一個:
?? 點贊??收藏 ?? 關注!
💛 💙 💜 ?? 💚💓 💗 💕 💞 💘 💖
再次感謝大家的支持!
你們的點贊就是博主更新最大的動力!

)





![[deepseek] C語言頭文件與匯編實現討論](http://pic.xiahunao.cn/[deepseek] C語言頭文件與匯編實現討論)


中,通過本地DEB 包安裝 cuDNN 9.13.0 的方法步驟)

)
)





