在工業控制場景中,中型異步電機直接啟動時會產生遠超額定電流的沖擊電流(通常為額定電流的 5-7 倍),不僅會影響電網穩定性,還可能對機械設備造成損傷。星三角(Y-Δ)降壓啟動是解決這一問題的經典方案,其通過改變電機繞組連接方式,將啟動電流降低至直接啟動的 1/3,廣泛應用于 30kW 及以上的異步電機控制。本文將以西門子 S7-200 SMART PLC 為例,從原理、硬件配置、程序編寫到調試,完整講解星三角降壓啟動控制方案。
一、星三角降壓啟動核心原理
星三角啟動的本質是通過階段性改變電機繞組連接方式,實現 “降壓啟動→全壓運行” 的切換,核心依賴電機繞組的兩種接線模式:
1. 三個關鍵階段
階段 | 繞組連接方式 | 核心動作(接觸器) | 目的與特點 |
啟動階段 | 星型(Y) | 主接觸器 KM1 吸合 + 星型接觸器 KM3 吸合 | 每相繞組承受電壓為額定電壓的 1/√3,啟動電流降低 |
切換階段 | 過渡(斷開 Y) | KM3 斷開,延時等待 | 確保 KM3 完全分斷,避免后續短路 |
運行階段 | 三角型(Δ) | KM1 保持吸合 + 三角型接觸器 KM2 吸合 | 繞組承受額定電壓,電機全功率運行 |
2. 安全紅線
絕對禁止 KM2(三角)與 KM3(星型)同時吸合!二者同時動作會導致電源直接短路,引發接觸器燒毀、電網跳閘甚至火災,因此必須通過 “軟件互鎖 + 硬件互鎖” 雙重保障。
二、案例需求與硬件配置
本次案例以控制一臺 30kW 三相異步電機為例,明確硬件設備、控制流程及安全要求。
1. 硬件設備清單
設備符號 | 設備名稱 | 功能說明 | 數量 |
SB1 | 啟動按鈕 | 常開觸點,觸發電機啟動 | 1 個 |
SB2 | 停止按鈕 | 常閉觸點,緊急停止或正常停機 | 1 個 |
FR | 熱繼電器 | 常閉觸點,電機過載保護(過流時斷開) | 1 個 |
KM1 | 主電源接觸器 | 控制電機總電源通斷,啟動 / 運行階段均吸合 | 1 個 |
KM2 | 三角型運行接觸器 | 運行階段吸合,使繞組呈 Δ 連接 | 1 個 |
KM3 | 星型啟動接觸器 | 啟動階段吸合,使繞組呈 Y 連接 | 1 個 |
S7-200 SMART | PLC 主機 | 核心控制單元(如 CPU ST30) | 1 臺 |
2. 控制流程
按下啟動按鈕 SB1 → KM1、KM3 同時吸合,電機以星型方式降壓啟動;
啟動同時觸發定時器,開始 5 秒延時(可根據電機功率調整);
5 秒后 → KM3 自動斷開,星型啟動結束;
KM3 完全斷開后 → KM2 吸合,電機切換為三角型全壓運行;
按下停止按鈕 SB2 或 FR 過載動作 → KM1、KM2、KM3 全部斷開,電機停止。
三、I/O 地址分配與 PLC 接線
1. I/O 地址分配表(關鍵!避免接線錯誤)
信號類型 | 設備符號 | 功能描述 | PLC 地址 | 接線備注 |
輸入信號 | SB1 | 啟動按鈕(常開) | I0.0 | 一端接 PLC 輸入端子 I0.0,另一端接 24V+ |
輸入信號 | SB2 | 停止按鈕(常閉) | I0.1 | 一端接 PLC 輸入端子 I0.1,另一端接 24V+ |
輸入信號 | FR | 過載保護(常閉) | I0.2 | 一端接 PLC 輸入端子 I0.2,另一端接 24V+ |
輸出信號 | KM1 | 主接觸器線圈 | Q0.0 | PLC 輸出端子 Q0.0 接接觸器線圈,線圈另一端接 24V- |
輸出信號 | KM2 | 三角接觸器線圈 | Q0.1 | PLC 輸出端子 Q0.1 接接觸器線圈,線圈另一端接 24V- |
輸出信號 | KM3 | 星型接觸器線圈 | Q0.2 | PLC 輸出端子 Q0.2 接接觸器線圈,線圈另一端接 24V- |
內部定時器 | T37 | 星三角切換延時 | T37 | 100ms 基準定時器,預設值 50(對應 5 秒) |
2. 硬件接線關鍵注意事項
輸入回路:所有輸入設備(SB1、SB2、FR)均采用 “24V+→設備→PLC 輸入端子→PLC 公共端(M)→24V-” 的回路,確保信號可靠觸發;
輸出回路:接觸器線圈需串聯浪涌抑制器(如續流二極管),防止線圈斷電時產生的高壓損壞 PLC 輸出點;
硬件互鎖(核心安全!):在外部接線中,將 KM2 的常閉輔助觸點串入 KM3 線圈回路,同時將 KM3 的常閉輔助觸點串入 KM2 線圈回路 —— 即使 PLC 程序出錯,也能物理阻斷 KM2、KM3 同時吸合。
四、PLC 程序編寫(STEP 7-Micro/WIN SMART)
采用梯形圖(LAD)編寫程序,邏輯清晰且符合電工習慣,共分為 5 個核心網絡,每個網絡均標注詳細注釋。
1. 程序整體邏輯框架
網絡編號 | 功能描述 | 核心控制目標 |
網絡 1 | 主接觸器 KM1 的起保停控制 | 實現 KM1 的啟動、自鎖與停止(受 SB2、FR 保護) |
網絡 2 | 星型接觸器 KM3 的控制 | 啟動階段接通 KM3,定時器到時后斷開 |
網絡 3 | 切換延時定時器 T37 的觸發 | KM1 吸合后開始計時,預設 5 秒 |
網絡 4 | 三角型接觸器 KM2 的控制 | 定時器到時且 KM3 斷開后,接通 KM2 并自鎖 |
網絡 5 | 運行狀態指示(可選) | 電機進入三角運行后,指示燈亮(如 Q0.3) |
2. 梯形圖程序與逐句解釋
網絡 1:主接觸器 KM1 的起保停控制
|
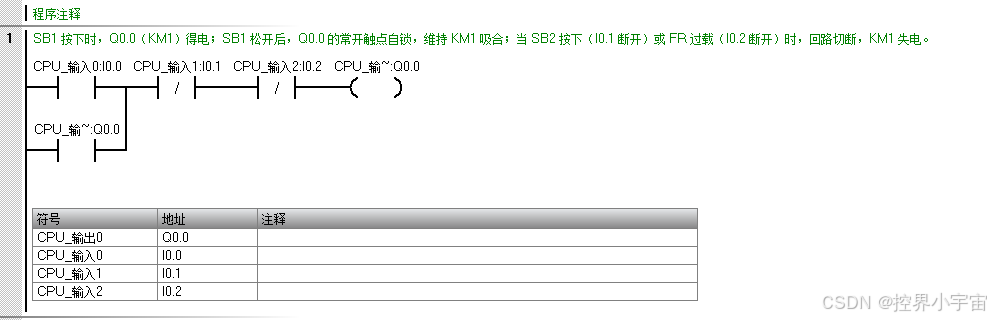
解釋:這是工業控制中經典的 “起保停” 電路。SB1 按下時,Q0.0(KM1)得電;SB1 松開后,Q0.0 的常開觸點自鎖,維持 KM1 吸合;當 SB2 按下(I0.1 斷開)或 FR 過載(I0.2 斷開)時,回路切斷,KM1 失電。
網絡 2:星型接觸器 KM3 的控制
|
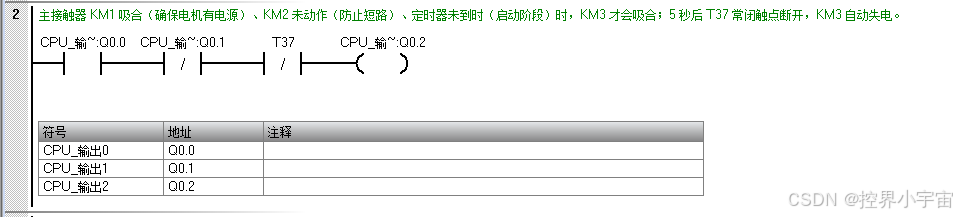
解釋:僅當主接觸器 KM1 吸合(確保電機有電源)、KM2 未動作(防止短路)、定時器未到時(啟動階段)時,KM3 才會吸合;5 秒后 T37 常閉觸點斷開,KM3 自動失電。
網絡 3:切換延時定時器 T37 的觸發
// 定時器參數:基準100ms,預設值50(50×100ms=5000ms=5秒) T37: IN=1, PT=50 |
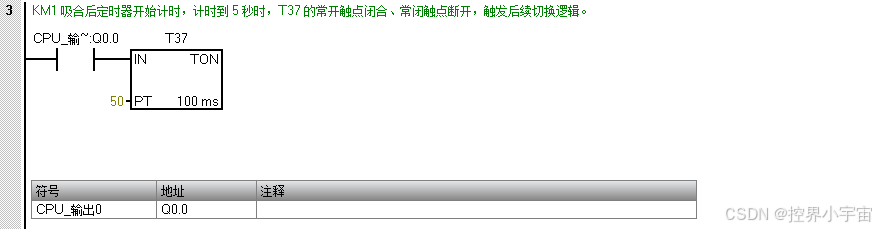
解釋:采用 “定時器(TON)”,KM1 吸合后定時器開始計時,計時到 5 秒時,T37 的常開觸點閉合、常閉觸點斷開,觸發后續切換邏輯。
網絡 4:三角型接觸器 KM2 的控制
|
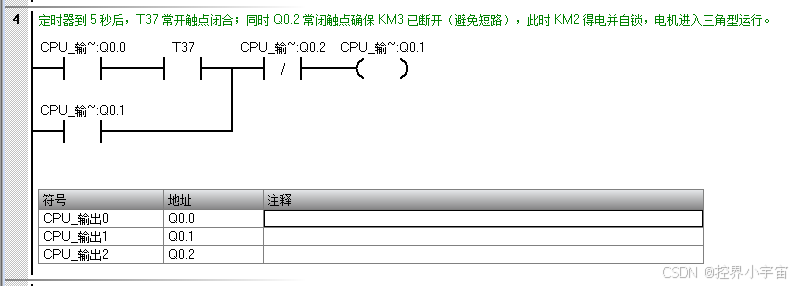
解釋:定時器到 5 秒后,T37 常開觸點閉合;同時 Q0.2 常閉觸點確保 KM3 已斷開(避免短路),此時 KM2 得電并自鎖,電機進入三角型運行。
網絡 5:運行狀態指示(可選)
解釋:Q0.3 可接一個指示燈,用于現場指示電機是否處于正常運行狀態,方便運維人員觀察。
五、程序仿真與調試步驟
程序編寫完成后,需通過 “軟件仿真 + 硬件調試” 驗證邏輯正確性,避免現場事故。
1. 軟件仿真(STEP 7-Micro/WIN SMART 仿真功能)
編譯程序:點擊 “編譯” 按鈕,確保無語法錯誤;
啟動仿真:打開 “仿真” 模式,創建 “強制表”;
模擬啟動:強制 I0.0(SB1)為 “1”,觀察 Q0.0(KM1)、Q0.2(KM3)是否立即置 1,T37 當前值是否從 0 開始遞增;
模擬切換:等待 T37 當前值達到 50(5 秒),觀察 Q0.2 是否置 0,Q0.1 是否置 1;
模擬停止:強制 I0.1(SB2)為 “0”,觀察 Q0.0、Q0.1、Q0.2 是否全部置 0。
2. 硬件調試(現場接線后)
斷電檢查:接線完成后,斷電檢查輸入 / 輸出回路是否短路、接線是否松動;
空載測試:斷開電機電源線,僅給 PLC 和接觸器通電,重復軟件仿真的操作步驟,觀察接觸器動作順序是否正確(KM1→KM3→(5 秒后)KM3 斷→KM2 合);
帶載測試:空載測試正常后,接好電機電源線,啟動電機,監聽電機運行聲音是否正常,用萬用表測量電機三相電流是否平衡;
故障測試:模擬 FR 過載(手動觸發 FR),觀察電機是否立即停止,驗證保護邏輯。
六、核心安全與優化總結
1. 雙重互鎖保障(必須實現!)
互鎖類型 | 實現方式 | 作用 |
軟件互鎖 | KM2 常閉觸點串入 KM3 回路,KM3 常閉觸點串入 KM2 回路 | 防止 PLC 程序邏輯錯誤導致 KM2、KM3 同時輸出 |
硬件互鎖 | KM2、KM3 輔助常閉觸點在外部回路互串 | 即使 PLC 輸出點故障(如 Q0.1、Q0.2 同時置 1),也能物理阻斷接觸器吸合 |
2. 程序優化建議
延時時間調整:根據電機功率調整 T37 的預設值(如 22kW 電機可設為 3 秒,55kW 電機可設為 8 秒),避免切換過早導致電流沖擊;
故障報警:可增加 “KM2/KM3 故障報警” 邏輯(如 T37 到時后 KM2 未吸合,觸發報警燈 Q0.4),方便故障排查;
急停擴展:若現場需緊急停機,可在輸入回路增加急停按鈕(如 I0.3,常閉),串入 KM1 控制回路。
結語
星三角降壓啟動是 PLC 控制中的經典應用,其核心在于 “安全切換” 與 “邏輯可靠”。本文基于西門子 S7-200 SMART PLC 的方案,從原理到調試全程覆蓋,可直接應用于風機、水泵、壓縮機等中型電機控制場景。實際項目中,務必優先保證硬件互鎖的可靠性,再通過軟件邏輯優化控制精度 —— 安全永遠是工業控制的第一準則。
若在調試過程中遇到接觸器動作異常、定時器不計時等問題,可通過 “程序狀態監控” 功能觀察各觸點狀態,逐步定位故障點。歡迎在評論區交流你的實踐經驗!











)





:Modbus RTU串口通信實現)

