在工業生產中,電機控制并非單一模式:調試設備時需要 “按動即轉、松開即停” 的點動功能,正常生產時則需要 “一鍵啟動、持續運行” 的連續控制。本文以西門子 S7-200 SMART PLC 為載體,詳細講解電機點動控制原理,并設計一套融合點動與連續運行的綜合控制方案,涵蓋硬件配置、程序編寫、邏輯優化全流程。
一、點動控制核心原理
1. 點動控制的定義與應用
點動控制(Jog)是指僅在操作人員持續按下按鈕時電機運行,松開按鈕電機立即停止的控制模式,核心特征是無自鎖環節。其典型應用場景包括:
- 設備安裝調試:如傳送帶位置校準、機床刀架微調;
- 精確定位操作:如起重機吊鉤微調、裝配線零件對位;
- 故障排查:電機空載試轉、機械卡滯檢測。
2. 與連續運行的核心區別
控制模式 | 核心邏輯 | 關鍵組件 | 適用場景 |
點動控制 | 無自鎖,按鈕保持觸發 | 點動按鈕 | 調試、微調、定位 |
連續運行 | 有自鎖,按鈕觸發后保持 | 啟動按鈕 + 自鎖觸點 | 長期穩定生產運行 |
二、綜合控制案例設計
1. 控制需求
實現 “點動” 與 “連續運行” 兩種模式獨立切換,且滿足以下安全與功能要求:
- 點動模式:按下點動按鈕電機運轉,松開按鈕電機停止;
- 連續模式:按下啟動按鈕電機持續運行,按下停止按鈕電機停止;
- 安全保護:過載、急停信號觸發時,電機立即停止,且兩種模式均受保護;
- 狀態指示:區分電機運行狀態(無論點動還是連續)與點動操作狀態。
2. 控制元件清單
設備符號 | 設備名稱 | 功能說明 | 數量 | 觸點類型 |
SB1 | 點動按鈕 | 觸發電機點動運行 | 1 個 | 常開 |
SB2 | 啟動按鈕 | 觸發電機連續運行 | 1 個 | 常開 |
SB3 | 停止按鈕 | 緊急 / 正常停止電機(安全信號) | 1 個 | 常閉(硬接線) |
FR | 熱繼電器 | 電機過載保護(過流時斷開,安全信號) | 1 個 | 常閉(硬接線) |
KM1 | 電機控制接觸器 | 控制電機主回路通斷 | 1 個 | 線圈(AC220V/380V) |
HL1 | 運行指示燈 | 指示電機是否運行(點動 / 連續通用) | 1 個 | 指示燈(DC24V) |
HL2 | 點動指示燈 | 指示當前是否處于點動操作模式 | 1 個 | 指示燈(DC24V) |
S7-200 SMART | PLC 主機 | 核心邏輯控制單元(如 CPU ST40) | 1 臺 | - |
三、I/O 地址分配與硬件接線
1. I/O 地址分配表(關鍵!避免接線錯誤)
信號類型 | 設備符號 | 功能描述 | PLC 地址 | 接線備注 |
輸入信號 | SB1 | 點動按鈕(常開) | I0.0 | 一端接 PLC 輸入端子 I0.0,另一端接 24V+ |
輸入信號 | SB2 | 啟動按鈕(常開) | I0.1 | 一端接 PLC 輸入端子 I0.1,另一端接 24V+ |
輸入信號 | SB3 | 停止按鈕(常閉) | I0.2 | 一端接 PLC 輸入端子 I0.2,另一端接 24V+ |
輸入信號 | FR | 過載保護(常閉) | I0.3 | 一端接 PLC 輸入端子 I0.3,另一端接 24V+ |
輸出信號 | KM1 | 接觸器線圈 | Q0.0 | PLC 輸出端子 Q0.0 接線圈,線圈另一端接 24V- |
輸出信號 | HL1 | 運行指示燈 | Q0.1 | PLC 輸出端子 Q0.1 接指示燈,另一端接 24V- |
輸出信號 | HL2 | 點動指示燈 | Q0.2 | PLC 輸出端子 Q0.2 接指示燈,另一端接 24V- |
2. 硬件接線關鍵注意事項
- 輸入回路規范:所有輸入設備(SB1~SB3、FR)均采用 “24V+→設備→PLC 輸入端子→PLC 公共端(M)→24V-” 回路,確保信號無抖動;
- 輸出回路保護:接觸器 KM1 線圈需串聯續流二極管(型號如 1N4007),防止線圈斷電時產生的反向高壓損壞 PLC 輸出點;
- 安全硬接線:停止按鈕 SB3、熱繼電器 FR 必須采用常閉硬接線,即使 PLC 程序故障,也能通過硬件切斷控制回路,避免電機失控。
四、PLC 程序編寫(STEP 7-Micro/WIN SMART)
采用梯形圖(LAD)編寫程序,分 “基礎版” 和 “改進版(點動優先)”,逐步優化邏輯,滿足工程實際需求。
1. 基礎版程序(點動與連續獨立控制)
程序邏輯框架
網絡編號 | 功能描述 | 核心控制目標 |
網絡 1 | 連續運行(起保停)控制 | 實現電機連續運行的啟動、自鎖與停止 |
網絡 2 | 點動控制 | 實現電機點動運行(無自鎖) |
網絡 3 | 運行指示燈控制 | 電機運行時(點動 / 連續)HL1 亮 |
網絡 4 | 點動指示燈控制 | 點動按鈕按下時 HL2 亮,指示點動模式 |
梯形圖程序與逐句解釋
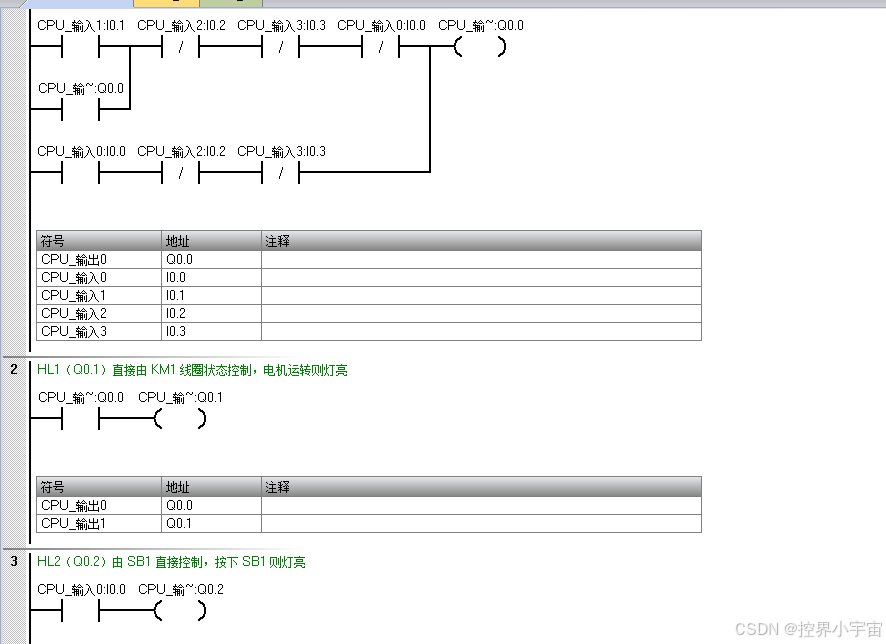
網絡 1:連續運行(起保停)控制
// 條件:停止按鈕SB3(I0.2,常閉)未動作 + 過載FR(I0.3,常閉)未動作 + 啟動按鈕SB2(I0.1,常開)按下 // 自鎖:KM1吸合后(Q0.0常開觸點閉合),即使SB2松開,電機仍持續運行
|
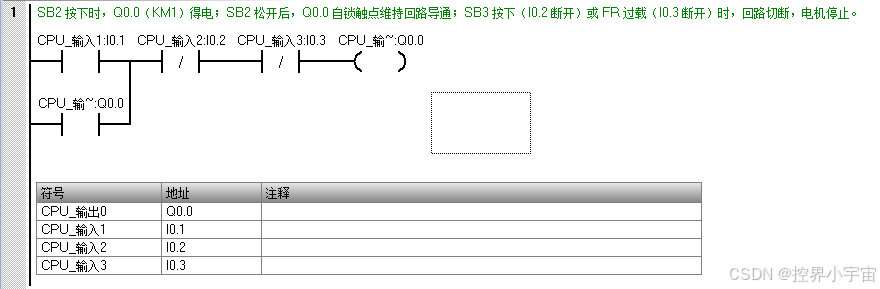
解釋:這是經典的 “起保停” 電路。SB2 按下時,Q0.0(KM1)得電;SB2 松開后,Q0.0 自鎖觸點維持回路導通;SB3 按下(I0.2 斷開)或 FR 過載(I0.3 斷開)時,回路切斷,電機停止。
網絡 2:點動控制
|
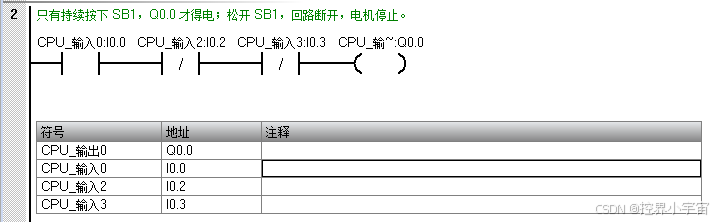
解釋:點動控制的核心是 “無自鎖”。只有持續按下 SB1,Q0.0 才得電;松開 SB1,回路斷開,電機停止。同時,SB3 和 FR 作為安全信號,確保點動時也受保護。
網絡 3:運行指示燈控制
解釋:HL1(Q0.1)直接由 KM1 線圈狀態控制,電機運轉則燈亮,方便現場人員判斷電機是否處于工作狀態。
網絡 4:點動指示燈控制
|
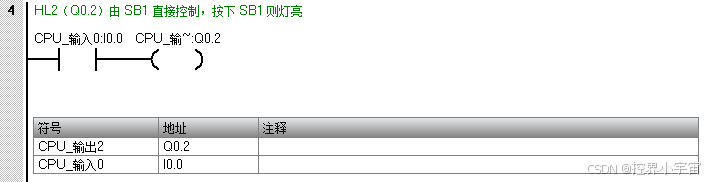
解釋:HL2(Q0.2)由 SB1 直接控制,按下 SB1 則燈亮,明確當前操作模式為 “點動”,避免誤判。
2. 改進版程序(點動優先,解決模式沖突)
基礎版的潛在問題
基礎版程序中,若電機處于連續運行狀態(Q0.0 自鎖導通),此時按下點動按鈕 SB1,會出現:
- SB1 按下時,網絡 2 回路導通,但網絡 1 的自鎖回路仍未斷開,Q0.0 持續得電;
- 松開 SB1 后,電機不會停止,仍保持連續運行,無法實現 “點動打斷連續” 的安全需求。
改進方案:增加點動與連續的互鎖
在連續運行回路中,串聯點動按鈕 SB1 的常閉觸點,實現 “點動優先”—— 按下 SB1 時,立即切斷連續運行的自鎖回路,強制切換為點動模式。
改進版梯形圖(僅修改網絡 1,避免出現雙線圈刪除程序段2)
// 改進點:串聯SB1(I0.0)的常閉觸點,實現點動優先
|
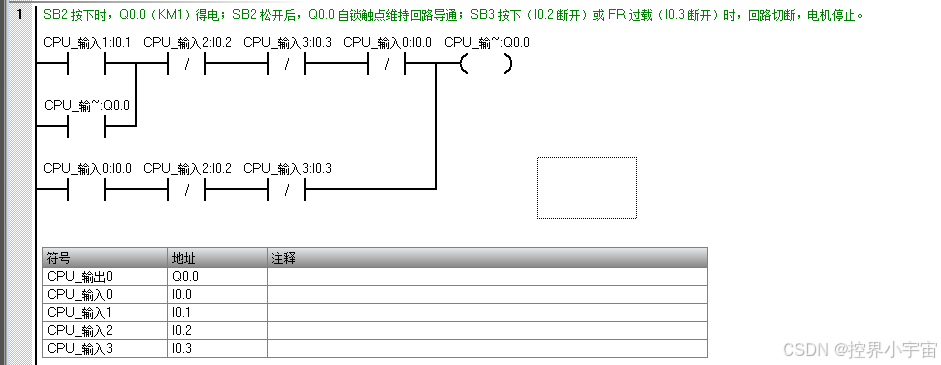
改進邏輯分析:
- 未按 SB1 時,I0.0 常閉觸點導通,連續運行回路正常工作(SB2 啟動、自鎖);
- 按下 SB1 時,I0.0 常閉觸點斷開,連續運行的自鎖回路被切斷,即使之前處于連續運行,也會立即轉為點動模式(僅 SB1 按下時電機運行);
- 松開 SB1 后,I0.0 常閉觸點恢復導通,若需重新連續運行,需再次按下 SB2,邏輯更安全。
五、程序仿真與硬件調試
1. 軟件仿真(STEP 7-Micro/WIN SMART 仿真功能)
- 編譯程序:點擊 “編譯” 按鈕,確保無語法錯誤;
- 創建強制表:添加 I0.0~I0.3(輸入)、Q0.0~Q0.2(輸出),用于模擬現場信號;
- 測試連續運行:
- 強制 I0.2(SB3)=1、I0.3(FR)=1(安全信號正常);
- 強制 I0.1(SB2)=1,觀察 Q0.0 是否置 1,松開 I0.1 后 Q0.0 是否保持 1(自鎖有效);
- 強制 I0.2=0(按下 SB3),觀察 Q0.0 是否置 0(停止有效);
- 測試點動優先:
- 先按上述步驟啟動連續運行(Q0.0=1);
- 強制 I0.0(SB1)=1,觀察 Q0.0 是否仍為 1(點動導通),松開 I0.0 后 Q0.0 是否置 0(連續回路被切斷)。
2. 硬件調試(現場接線后)
- 斷電檢查:用萬用表測量輸入 / 輸出回路,確認無短路、接線無松動;
- 空載測試:斷開電機電源線,僅給 PLC 和接觸器通電:
- 按下 SB2(啟動),觀察 KM1 是否吸合,HL1 是否亮;
- 按下 SB3(停止),觀察 KM1 是否斷開;
- 按下 SB1(點動),觀察 KM1 是否隨 SB1 的按下 / 松開吸合 / 斷開,HL2 是否亮;
- 帶載測試:接好電機電源線,啟動電機,監聽運行聲音是否正常,用鉗形表測量三相電流是否平衡;
- 過載測試:手動觸發 FR(模擬過載),觀察 KM1 是否立即斷開,電機停止。
六、核心注意事項
- 安全信號硬接線優先:停止按鈕 SB3、熱繼電器 FR 必須采用常閉硬接線,不能僅依賴 PLC 程序(如程序跑飛時,硬接線仍能切斷控制回路);
- 接觸器線圈保護:必須串聯續流二極管,型號選擇需匹配線圈電壓(如 DC24V 線圈用 1N4007,AC220V 線圈用 RC 阻容吸收器);
- 模式互鎖邏輯:工程實踐中優先選擇 “點動優先” 方案,避免兩種模式同時觸發導致的控制混亂;
- 信號抗干擾:輸入信號線(SB1~SB3、FR)需采用屏蔽線,屏蔽層單端接地,避免電磁干擾導致信號誤觸發。
結語
電機點動與連續運行的綜合控制是工業 PLC 應用的基礎場景,核心在于 “明確模式差異、做好安全互鎖”。本文的改進版程序(點動優先)已在風機、水泵、傳送帶等設備中驗證,邏輯可靠、安全性高,可直接移植到實際項目中。
若在調試中遇到 “點動時電機抖動”“連續運行無法自鎖” 等問題,可通過 PLC 的 “程序狀態監控” 功能觀察觸點狀態,定位故障點(如輸入信號是否正常、互鎖觸點是否導通)。歡迎在評論區分享你的實踐經驗或疑問!









)





:Modbus RTU串口通信實現)



